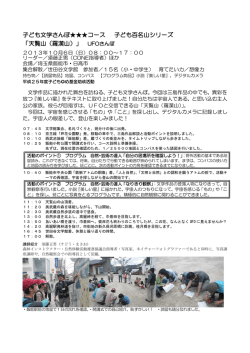
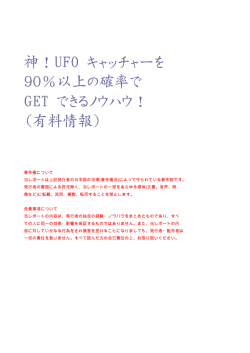
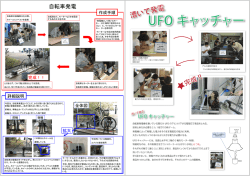
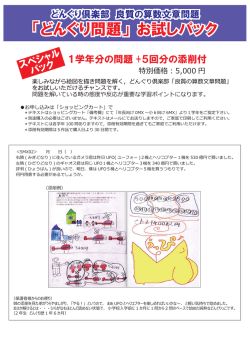
T1 植田・田中: 動体監視ソフトウェアによるビデオ録画の自動解析 Bird Research Vol. 2, pp. T1-T7, 2006 © Japan Bird Research Association 鳥の巣のビデオ録画の動体監視ソフトウェアによる自動解析 植田睦之1・田中啓太2,3 1. バードリサーチ. 〒191-0032 東京都日野市三沢1-26-9-2-202 [email protected] 2. 立教大学大学院理学研究科. 〒171-8501 東京都豊島区西池袋3-34-1 理・生命・上田研(4213) 3. 日本学術振興会特別研究員(PD) 鳥類の繁殖生態の調査や行動解析では,巣をビデオ録画する方法がよくもちいられる.この 方法は,観察結果を再検証可能な録画記録として残すことができるだけでなく,複数の巣を並 行して調査することができるなど利点の多い手法である.しかし,そのような利点の反面,ビデ オ解析に膨大な時間がかかることが大きな欠点であり,録画はしたものの,その一部しか解析 できずに,情報を無駄にしてしまっている研究者も多い. もし,長時間録画したビデオの中から自動的に必要な部分を抽出することができれば,ビデ オ録画の欠点を軽減し,ビデオをもちいた研究を効率的にすすめることができるだろう.そこ で,主に流星等の観測に使われている動体監視ソフトウェアによる親鳥の訪巣の前後の映像 の抽出を試みたところ,それを抽出することができたので,ここで紹介する. 調査方法 解析したデータは富士山の静岡県須走付近(35°21’N,138°52’E)で撮影した 3巣のルリビ タキ Tarsiger cyanurus の巣の映像である.画面上の鳥の大きさによる動体監視ソフトウェアの 解析の可否を検討するために,異なる距離から撮影された 3巣を解析にもちいた.すなわち, 巣Aは巣内の映像,巣Bは巣外の近距離からの映像,巣Cは巣外の道を隔てた遠距離の映像 である.巣BとCはビデオカメラ(Canon DM-FV30: MiniDV録画方式)をもちいて撮影し,巣Aは CCDカメラ(塚本無線 T-PI-1131CI)で得た映像を上記ビデオカメラで録画した.各巣の録画 日と録画時間は,巣Aが2005年 7月15日,16日の16時間,巣Bが2004年 8月31日の 4時間, 巣Cが 8月16日の 4時間だった.なお,巣Aはジュウイチ Cuculus fugax により托卵された巣で 巣内にはジュウイチのヒナがいた. 解析にあたっては,まず,これらの録画データを目視で確認し,何回ルリビタキが給餌に来 ているかを確認した.次に,動体監視ソフトウェアでの親からヒナへの給餌の自動抽出を行 2006年11月11日 受理 キーワード: 解析手法,調査方法,繁殖生態,ビデオ録画,訪巣 Technical report T2 Bird Research Vol. 2, T1-T7 (2006) コンピュータ UFO Capture V2 ビデオカメラ Card bus ビデオカード Canon DM-FV30 映像データ ELSA EX-VISION Sony VAIO VGN-SZ90S Mini 動体検出 動画ファイル (WMV, AVI 形式) Liveタブでの設定 ・検出動体の指定 Detect Size = 50, Detect Lev = 30 Inputタブでの設定 ・動画ファイル形式の指定 今回はWMV形式を指定 Codec = WMV ・抽出範囲の設定 前5秒,後10秒 30が約 1秒を示すので,Head = 150, Tail = 300 ・動体検出ファイルの指定 Detect Area の Editで編集した bmpファイルを指定 ・検出動体の指定 Detect Level Noise Tracking = OFF (チェックをはずす) Scintillation Mask = OFF (チェックをはずす) Dark Obj Mask = OFF (チェックをはずす) Slow Obj Mask = ON, SOsize = 0 図 1. 試験に用いたシステムと UFO Captureの設定 Fig. 1. The system used to analyze the video data. なった.ビデオカメラをコンピュータ(Sony VAIO VGN-SZ90S,ビデオカード Elsa EX-VISION MINI)につなぎ,ビデオを再生し,動体監視ソフト(UFO Capture V2)で抽出を試みた(図 1). このソフトウェアは画面上に動くものがあると,その前後の映像を動画ファイルとして保存するこ とができる.そこで,飛来した親鳥が画面上で動くのを感知させ,その前後の映像を抽出するこ とで,給餌回数や給餌時の行動が記録できるかどうかを試験した. UFO Capture V2の設定 UFO Capture V2は http://sonotaco.com/soft/index.html よりダウンロードすることができる 動体監視ソフトウェアである.様々な動体の監視のために,目的に合わせていろいろな設定を することが可能だが,今回の解析では,以下のように設定した. T3 植田・田中: 動体監視ソフトウェアによるビデオ録画の自動解析 図 2. 動体抽出をする範囲 (C)と指定した場合に誤 抽出が出る可能性の高い 範囲(A,B) B A C C Fig. 2. The motion detecting software “UFO Capture V2” is most likely to detect feeding events when motion is detected in the lower corners of the screen (c). A false detection is likely to occur due to movements of either roots by the wind (b), or by the chick (a). 1.抽出範囲の設定: 動体を検出した時点より前,そして検出されなくなってから後の任意の 秒数を設定し,その範囲の映像を抽出し,録画することができる.そこで,今回は検出時点 の前 5秒,後10秒の録画を行なうこととした. 2.動体検出をする範囲の指定: ビデオ映像の一例を図 2に示したが,図上のAは,ヒナが動 くことで,親鳥が飛来しなくても,動体検出して,映像を抽出してしまう可能性がある範囲で ある.また,Bは風で木の根が揺れて,それを検出してしまう可能性がある範囲である.UFO Capture V2には,動体検出をしない範囲を指定することができるので,Cの範囲を除き,動 体検出しない範囲として設定した. 3.検出動体の指定: UFO Capture V2は流星観測に使われているので,背景画像より暗い動 体は検出しないオプションが設定されている.今回の場合は背景より暗く鳥が映る可能性が あるので,このオプション(Dark Object Mask)をOFFにした.また,検出能力を高く設定する と,風やヒナが動いた振動によるかすかな巣の揺らぎや,光の揺らぎも検出してしまう.この 検出するレベルを自動的に調整する Detect Level Noise Trackingという機能,揺らぎなど 長時間継続する動体を検出しなくする Scintillation Maskという機能があるが,それらはOFF にした.また,ゆっくり動くものを検出しなくする Slow Object Maskという機能があるが,それ はONにしたが,ゆっくり動いているものの周辺を検出範囲から除外する SOsizeは 0としてそ の機能は働かなくした.検出する動体のフレーム数を示す Detect Sizeは50に,検出する動 体の大きさ(画素数)を示す Detect Levは30とした.巣Bについては,映像に虫が映ることが 多く,この設定では誤抽出が極めて多くなってしまったため,Detect Levを50に設定した. T4 Bird Research Vol. 2, T1-T7 (2006) 図 3. 抽出された巣Bの映像. 図 4. 巣Cの映像.円内に親鳥がいる. Fig. 3. A captured image of a bird entering “Nest B ”. Fig. 4. A captured image of a bird entering “Nest C ” 結果および考察 1. 目視による確認と動体監視ソフトウェアによる抽出の比較 巣Aの16時間のビデオ録画時間中,296回,親鳥が巣に給餌に訪れた.この訪巣のすべて をUFO Capture V2は抽出することができた.巣B(図 3)と巣C(図 4)は巣外から撮影したため に,特に巣Cは鳥の映る大きさが小さかったが,それでも,それぞれ 4時間の録画中の49回と 45回の訪巣のすべてを抽出することができた.抽出された画像はWeb資料を参照されたい.ま た,巣Bでは,テープを早送りした状態では目視で認識できなかった 3回の訪巣を自動抽出す ることができた. 2. 動体監視ソフトウェアによる誤抽出 親鳥が訪巣していないにも関わらず,画像を抽出してしまった誤抽出は,巣Aでは165回あっ た.巣Bでは127回,巣Cでは44回だった. 巣Aの誤抽出のうち,20回は蛾類やアリ類などの昆虫が巣の前を横切った場合で,46回はヒ ナが動体検出範囲にくちばしや羽など身体の一部を出した場合,残りの99回は風で巣や周囲 が揺れたり,ビデオ画像が乱れたりした状態を検出してしまったものだった.画像の乱れが多 かった 7月15日午前中の映像では画像の乱れによる誤抽出が多く,画角の問題で動体検出 を行なう範囲が狭くなり,ヒナの動きの影響を受けやすくなっていた 7月16日午前中の映像(図 2)は,ヒナの身体の一部が検出範囲に出ることによる誤抽出が多かった.図 2の映像も,もう少 し画角を下げて,巣の前面が映るようにすれば,ヒナの影響を受けやすい巣の縁を避けて動体 検出範囲を設定することができるので,誤抽出を減らすことができたと思われる. また,動体の検出条件を厳しくすることで誤抽出を減らすことができる.たとえば,Detect Level Noise Trackingと Scintillation MaskをONにして,Slow Object Maskの SOsizeを15に設 定した場合は,7月15日午前中の誤抽出率を39%から10%に減らすことができたが,反面,親 植田・田中: 動体監視ソフトウェアによるビデオ録画の自動解析 T5 図 5. 抽出された画像のイメージ(給餌の場合).水 色の動体が検出された範囲が広いことと,ヒナ の姿勢より給餌の画像であることがわかる. 図 6. 抽出された画像のイメージ(誤抽出の場合). 水色の動体が検出された範囲が狭いことから, 誤抽出であることがわかる. Fig. 5. An example of an image captured by the “UFO Capture V2” software. The light-blue portion indicates the area where a moving object was detected. Fig. 6. An example image of a false detection by “UFO Capture V2.” From the position of the light-blue portion and the posture of chick, it is easy for a human reviewer to judge that the image is not a feeding scene. 図 7. 抽出された画像のイメージ(誤抽出の場合).水 色の動体検出部が線状であることから,虫である ことがわかる. Fig. 7. An example image of a false detection by insect. 鳥の訪巣の抽出漏れが 1回生じた.誤抽出を減らすことと親鳥の訪巣を確実に記録することは 両立できないことが多いと思われる. 巣Bは誤抽出が127回と,ほかの巣と比べて多かった.これは,虫が多かったため(71回)と, 風が強く,ビデオカメラが揺れてしまったため(56回)だった.巣Cは虫による誤抽出が44回中 41回を占めた. UFO Capture V2は,映像とともに,動体を検出した時点の静止画をJPEGファイルで保存す る.静止画にはその時の画像とともに,動体を検出した範囲が示される.この静止画を確認す ることで,訪巣の場合(図 5)は,ヒナの姿勢や動体が検出された範囲から,給餌が行なわれた ことを簡単に判定でき,誤抽出の場合(図 6)は,動体検出範囲が狭いことで,簡単に判定する ことができた.これは,巣BやCの場合も同様で,虫の場合は細く線状に検出された場所が示さ れるので(図 7),簡単に判定することができた.したがって,誤抽出がある程度あっても,簡単 に除外することができ,ビデオ解析の効率化の上ではそれほど問題にはならないので,検出 T6 Bird Research Vol. 2, T1-T7 (2006) 条件を厳しくして誤抽出が減る反面,親鳥の訪巣の記録漏れが起きてしまうよりも,ある程度の 誤抽出が出てもすべての訪巣を記録できるように検出条件を設定した方が良いだろう.ただ し,無駄な誤抽出を減らすために,画角を工夫することや画面のゆれを防ぐために頑丈な三脚 を使用することなど,撮影上の工夫は重要である. 3. 動体監視ソフトウェアの限界と可能性 UFO Capture V2は,鳥の巣のビデオ録画の解析に適した方法だが,使用のためにはいく つかの制限がある.1つは,画像処理をするために高速のコンピュータが必要で,抽出した映 像のファイルサイズが大きくなるために充分なハードディスクの空き容量がなければならないこ とである.コンピュータの推奨スペックは Pentium 4 2.4GHz以上,RAM512MB以上,ハード ディスクの空き容量10GB以上であり,これ以上の能力を持つコンピュータがあることが条件とな る. 2つ目は,動体を監視するソフトウェアであるため,巣や周囲の葉などが動いてしまう場合に は,それらの動きに反応してしまい,誤抽出が多くなってしまうことである.誤抽出を簡単に判 別できるとはいっても,あまりにも多い場合には実用に耐えないだろう.動体検出範囲を画面 上の任意の位置に簡単に指定することが可能なので,もし,背景に動きが少なく,親鳥が通過 する場所があれば,その場所のみで動体検出をすることにより,自動抽出が可能になる.巣C の場合も,巣の周囲の葉は風で揺れていたが,この機能を使うことで誤抽出を減らすことがで きた.しかし,ヨシにつくられた巣などでは,巣も周囲の葉も動くので,動体検出は実質不可能 だろう.ただし,UFO Capture V2には音に反応させて映像抽出することができるので,雛の声 を利用して映像抽出できる可能性もある. 以上のように,使用できる環境や種に制限はあるものの,使用可能な種ではUFO Capture V2は極めて有効なツールになりうるだろう.特に巣Bのように,瞬間的に親鳥が巣に飛び込む ような映像では,早送りをしながらのビデオ解析が困難で,そのような場合には極めて有効で ある.また,この動体検出の機能は,巣のビデオ解析だけでなく,ほかの調査にも使えるもので ある.たとえば,今回,昆虫も誤抽出の原因となっていたが,巣Aでの昆虫が原因の誤抽出は 7月15日の午前中 4時間に 5回,午後が 4回,16日の午前が 5回,午後が 6回とほぼ一定して いた.このことは,この手法が昆虫の生息状況のモニタリング手法としても有効だということを示 しているのかもしれない.また,木の実や餌台に集まる鳥の監視や,上空を通過する渡り鳥の モニタリング等にも使えるかもしれない. T7 植田・田中: 動体監視ソフトウェアによるビデオ録画の自動解析 Nest observation analysis with a motion detecting software for recorded video images Mutsuyuki Ueta1 & Keita Tanaka2,3 1. Japan Bird Research Association, Misawa 1-26-9-2-202, Hino, Tokyo 191-0032, Japan 2. Lab. Anim. Ecol., Life Sciences, Rikkyo Univ., Nishi-Ikebukuro 3-34-1, Toshima, Tokyo 171-8501, Japan 3. JSPS Postdoctoral Research Fellow Observing bird nests by use of video cameras is a frequently used method to study breeding ecology of birds. Despite its versatility, this method demands a great amount of time and trouble for a human reviewer to extract the relevant information from these video data. We tested the utility of a motion detecting software “UFO Capture V2” applied to video data in which parent birds delivered food to their nests. Using this software, we captured video clips of the birds’ feeding behavior and compared them to data that had already been recorded by a human observer. As a result, we succeeded in detecting all the feedings, though non-feeding movements were inevitably captured. This software would be an effective tool to assist the analysis of video data, because a human reviewer would only need to review the portions of the recordings that were identified by the software in order to exclude the non-feeding movements. Key words: analysis tool, breeding ecology, feeding, research method, video image Web資料 Electronic Appendix http://www.bird-research.jp/appendix/br02/t01.html Web資料 1. 抽出されたルリビタキの巣の映像 Electronic Appendix 1. The captured image of Siberian Bluechat entering nest by the “UFO Capture V2” software.
© Copyright 2026 Paperzz