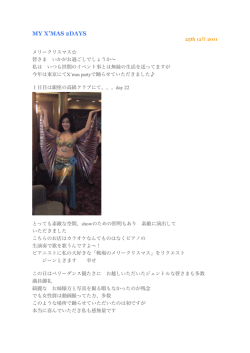
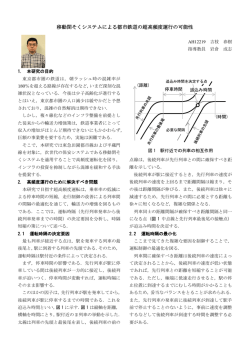
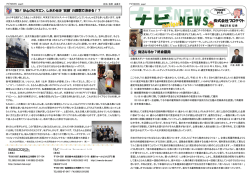
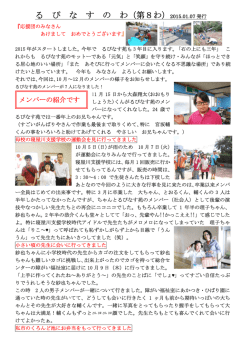
卒業研究論文 マルチエージェントモデルを用いた 駐車場案内システムの評価 学籍番号 05D8104037H 大野 指導教員 悟史 田口 東 教授 2009 年 3 月 あらまし 本研究では, マルチエージェントモデルを用いて, 駐車場内における自動車の行動をモ デル化し, 駐車場内のシミュレーションを行う. 駐車場案内システムの有無による自動車 への影響を比較, 検証することを目的とする. 駐車時におけるドライバーの傾向を元に駐 車スペースに得点付けを行う. 駐車場における自動車の行動をモデル化する. 駐車場案内 システムのモデル化と実装を行う. 駐車場案内システムの有無により実行を行う. 実行結 果の比較と考察を行う. キーワード:マルチエージェントモデル, 駐車場案内システム, 駐車場における自動車の挙 動, 駐車行動のシミュレーション 目次 第1章 はじめに............................................................................. 2 第2章 マルチエージェントモデル ................................................ 3 2.1 マルチエージェントモデルとは ............................................................................... 3 2.2 マルチエージェントシミュレータ(MAS)概要 ..................................................... 4 第3章 駐車行動シミュレーション ................................................ 7 3.1 シミュレーションの設定 .......................................................................................... 7 3.2 駐車場について ........................................................................................................ 7 3.3 駐車スペースの点数付けについて ............................................................................ 8 3.3.1 施設入口(エントランス)との距離による点数付けの設定 .............................. 9 3.3.2 駐車場出口との距離による点数付けの設定 ..................................................... 11 3.3.3 自動車エージェントの位置による点数付けの設定 .......................................... 12 3.4 自動車エージェントの設定..................................................................................... 13 3.6 出力の設定.............................................................................................................. 21 第4章 シミュレーションの実行と比較 ....................................... 22 4.1 案内システムが有る場合と無い場合の実行と比較 ................................................. 22 4.2 各出力の比較と考察 ............................................................................................... 26 4.2.1 比較.................................................................................................................. 26 4.4.2 考察.................................................................................................................. 30 第5章 おわりに........................................................................... 31 5.1 まとめ..................................................................................................................... 31 5.2 今後の課題.............................................................................................................. 31 1 第1章 近年, はじめに デパートや百貨店, アウトレットなどの大型ショッピングモールが数多く建設さ れている. 買い物だけでなく, 食事や映画などの娯楽施設を併設している大型ショッピン グモールも多く, 休日には多くの客が訪れている. 多くの人が集まる大型ショッピングモ ールには大型の駐車場が必要である. 駐車場内部の状態が混雑している場合, 駐車場の外 部まで自動車渋滞を引き起こし, 近隣の住民に悪影響を及ぼす恐れがある. 駐車場内部の自動車の動きをスムーズにすることによって, 外部への影響を抑えること ができる. 駐車場案内システムはそのひとつの方法である. システムがあることによって, ドライバーは駐車場内において目的とする駐車スペースを早く見つけることができ, 探し 回ることが少なくなる. 本研究では, マルチエージェントモデルを用いて, 駐車場内における自動車の行動をモ デル化し, 駐車場内のシミュレーションを行う. 駐車場案内システムの有無による自動車 への影響を比較, 検証することを目的とする. 2 第2章 マルチエージェントモデル 本章では, 本研究でシミュレーションを行うために用いるマルチエージェントモデルの 説明を行う. 2.1 マルチエージェントモデルとは 多数の自動車同士が影響を及ぼしあう駐車場内の状況のシミュレーションをするために は, 複雑なプログラムを作り, 膨大な計算をしなくてはならない. そこで, 本研究ではマル チエージェントモデルを用いる. 多数存在するエージェント(ここでは自動車)の種類ごと に独立したルールを設定し, 各エージェントはそのルールに従って行動する. このモデル は, 各エージェント同士の相互作用による働きでシステム全体の動きを表現することがで きる. マルチエージェントモデルの特性 マルチエージェントモデルの基本的な特性として以下の項目があげられる. 1. 自立性 エージェントは人間などの直接的介入なしに動作し, 自身の行動や内部状態を制御する ことができる. 2. 社会性 何らかの言語を介して他のエージェントや人間と情報交換することができる. 3. 反応性 エージェント自身が自分の置かれた環境を認知し, その変化に対して適切に応答するこ とができる. 4. 自発性 外部環境に対して単純な反応だけでなく, 目標を持った自発的な行動を起こすことがで きる. すなわち, エージェントモデルではエージェント自身が環境を認知し, 自律的に自分自 身を環境に対応させるように変化させ, 加えて, 他のエージェントとも情報交換を行い, 目 標を達成するためによりよい行動を自分で計画し, 実現することができる, という特性を 持っている. 3 2.2 マルチエージェントシミュレータ(MAS)概要 マルチエージェントシミュレータ(Multi Agent Simulator; 以下 MAS と略す)は, マル チエージェントシステムを容易に構築するための様々な機能が用意されており, 構造計画 研究所が開発したソフトウェアである. MAS の実行ルールの記述に使用されている記述言 語は, 基本的に Microsoft 社の Visual Basic に沿った文法を用いている. 2.2.1 MAS の特徴 ・ MAS において, エージェントは階層構造を有しており, 最上位に World エージェント が存在する. World の下階層に「空間」や「エージェント」, 「変数」を配置し, シミュ レーションの空間全体を構成している. ・ シミュレーションを行うために必要となる様々な関数が用意されており, エージェント の配置や移動, コレクション(エージェントの集合)の取得などを容易に行うことがで きる. ・ シミュレーションの実行に際して, エージェント生成時に1度だけ実行され, 各エージ ェントに対して初期値を与える関数 Agt_Init と, ステップ毎にシミュレーションが終 了するまで繰り返し実行される関数 Agt_Step とに分かれている. その他の関数は必要 に応じてユーザ自身が自由に定義することができる. 2.2.2 MAS の仕様 a) 空間の定義と Direction の定義 MAS の空間の仕様と Direction を図 2.1 に示す. MAS の空間は二次元の座標空間で定義 されており, セルと呼ばれるグリッドに区切られた空間にエージェントを配置する. 左上 端を x = 0 , y = 0 とし, 右方向が + x 方向, 下方向が + y 方向である. Direction はエージェ ントの向きを表す変数であり, − y 方向を 0 とし, 反時計回りに増加し, 0 から 360 までの 方向が定義されている. 4 x 0 0方向 45方向 90方向 y 図 2.1 空間の仕様と Direction b) 組み込み関数 表 2.1 は, 本研究において, シミュレーションに利用した組み込み関数の一覧である. _CreateAgent は, 指定したエージェントを生成する関数である. 例えば, 0 以上 1 未満の 乱数値を求めるランダム関数を用いて, その値がある値以下ならばエージェントを生成す る, などの操作を行うことができる. _KillAgent は, 指定したエージェントを削除する関数である. 本研究においては, 出口に 到達した車エージェントは退場したエージェントとみなし, この関数を用いて削除する. _CountAgent は, 指定したエージェントの個数を取得する関数である. _CollectAround は, 指定した位置座標の周りにいるエージェントのコレクション(エー ジェントの集合)を取得する関数である. この関数は x 座標, y 座標, 視野, 空間名, エージ ェント名を引数に取る関数であり, ある特定の座標を中心に, 指定したセル数だけ離れた 範囲内にある指定した種類のコレクション(エージェントの集合)を取得する. この関数を 用いて, 各車エージェントが認識できる範囲内にある駐車マスの取得を行う. 図 2.2 は, _CollectAround の引数の 1 つである「視野」を示している. 図中の数字は, 0 を中心とした ときの, 中心からの距離を表し, この値を視野という. 視野が 0 であれば中心のみ, 視野が 1 であれば図の「0」「1」の部分を指定できる. 視野を 2 とした場合は, 図の「0」「1」「2」 の部分, つまり図 2.2 の網掛け部分の範囲を指定することができ, この範囲内に含まれるエ ージェントの集合を取得することができる. _ViewCountAgent は, 指定された位置座標を中心に, 周りのエージェントの個数を取得 する関数である. この関数は x 座標, y 座標, 視野, エージェント名を引数に取る関数であ り, ある特定の座標を中心に, 指定したセル数だけ離れた範囲内にある指定した種類のエ ージェントの個数を取得する. この関数を用いて, 駐車場内の指定したエリアごとに駐車 マスと車の数を取得することにより密度を計算する. 5 _Forward は, Direction 変数の値により指定された方向へ, 指定した距離だけエージェン トを移動させる関数である. この関数を用いて, ステップごとに車エージェントを前進さ せる. _Turn は Direction 変数に応じてエージェントの向きを変える関数である. この関数を用 いて, 曲がり角や合流部で車エージェントを右左折させる. _DebugStr は, デバッグ画面に文字列を表示する関数である. _GetCountStep は, 現在のステップ数を取得する関数である. 例えば, この関数を用い て, ある一定の周期を定めることができる. また, 1 ステップあたりの時間を定めておけば, 経過時間をステップ数で把握することができ, 時間の経過とともにエージェントの動きを 変化させることもできる. 表 2.1 MAS に組み込まれている関数とその動作 関数 _CreateAgent _KillAgent 動作 エージェントを生成する. エージェントを削除する. 指定されたエージェントのオブジェクト数を取 _CountAgent 得する. 指定した位置座標の周りにいるエージェントの _CollectAround コレクション(エージェントの集合)を取得する. _ViewCountAgen 二次元空間において, 指定された座標を中心に, t 周りのエージェントの個数を取得する. Direction変数によって指定された方向に前進す _Forward る. _Turn 向きを変える(Direction変数に反映) デバッグ画面に文字列を表示する. _DebugStr _GetCountStep 現在のステップ数を取得する. 3 3 3 3 3 3 3 3 2 2 2 2 2 3 3 2 1 1 1 2 3 3 2 1 0 1 2 3 3 2 1 1 1 2 3 3 2 2 2 2 2 3 3 3 3 3 3 3 3 図 2.2 視野の範囲 6 第3章 駐車行動シミュレーション 本研究では, MAS を用いて駐車場内の自動車同士の相互関係と, 駐車場案内システムに よる影響のシミュレーションを行う. 本研究では, 駐車場内における自動車をエージェントとしてとらえ, 個別の自動車の動 きから駐車場全体の自動車の動きを表現する. 本シミュレーションでは, World の階層下に 駐車場という空間を配置し, さらに駐車場の階層下に自動車エージェントを配置する. 本章では, 3.1 節で本シミュレーションの設定, 3.2 節で本シミュレーションにおける駐車 場の設定について述べる. 3.3 節で駐車スペースの点数の付け方, 3.4 節で自動車エージェン トの説明し, 3.5 節で駐車場案内システムの設定, 3.6 節で出力するデータの内容について説 明する. 3.1 シミュレーションの設定 自動車エージェントは, 駐車場の入口から入場し, 自動車エージェントが選択した駐車 スペースに 1 度だけ駐車する. 駐車場の 1 マスの一辺を 5 メートル, 1 ステップあたりの時 間を 2 秒と設定する. 自動車エージェントは 1 ステップあたり 1 マス進むこととする. した がって, 自動車は時速 9 キロメートルで移動する[2]. 自動車エージェントは目的地に到着すると車庫入れを行う. このとき自動車エージェン トは駐車するために 5 ステップ間停止するよう設定する. 駐車場への入場台数については, 駐車場の収容台数である 199 台までとし, 完全に一定の 間隔で入場するように設定する. 3.2 駐車場について 本節では, 本シミュレーションにおける駐車場の設定について説明する. 図 3.1 のように, 駐車場内には緑の四角で表される駐車マス, 黒い四角で表される壁, 青 い丸で表されるエントランス, ピンクの丸で表される駐車場の出口, 黄色の三角で表され る自動車エージェントを設置する. 駐車マスは自動車が駐車行動を始めると黄色に変化し, 駐車が完了すると赤色になる. 自動車エージェントは状態によって色が異なる. 駐車マス に記してある数字は点数で自動車エージェントに記してある数字は周回数を表している. また, 駐車場は一方通行であるとし, 進行方向は図 3.1 の矢印で表したとおりである. X 軸方向に通っている通路を通路選択通路 A, 通路選択通路 B とし, Y 軸方向に通っている通 路の内, 入口へ戻る通路を通路 0, その他の通路を駐車場の入口から近い順に通路 1, 通路 2, 通路 3, 通路 4 とする(図 3.1). 駐車可能台数(駐車マスの数)は 199 台である. 7 B 0 1 2 3 4 A 図 3.1 駐車場の設定と経路 3.3 駐車スペースの点数付けについて 自動車エージェントは駐車場に入場すると最適と思われる駐車スペースを決定する. 現 実のドライバーは, 駐車する際, 駐車スペースからエントランスまでの距離, 駐車スペース と駐車場の出口との距離, 現在地から駐車スペースまでの距離, 駐車場の混み具合等を考 慮して目的地を決定していると考え, これらを点数化する[1]. 8 3.3.1 施設入口(エントランス)との距離による点数付けの設定 この点数は, シミュレーションの実行開始直後 1 回のみ点数付けされ, 以降ステップを重 ねても更新されることのない駐車スペースの固定パラメータである. 図 3.2 のように, エントランスの位置から最も遠い駐車スペースまでの, X 座標と Y 座標の和を基準の距離とする. エントランスの位置が 100 点, 最も遠い位置にある駐車スペ ースが 0 点となるように, 100 を基準の距離で割った点を線形的に減点させる. また図 3.3 のようにエントランスが複数ある場合は, 最も近いエントランスによる点をその駐車スペ ースの点数とする. 図 3.2 エントランスと距離による点数付け 9 図 3.3 エントランスが複数の場合の点数付け 10 3.3.2 駐車場出口との距離による点数付けの設定 この点数も, エントランスとの距離による点数付け同様に, シミュレーションの実行開 始直後 1 回のみ点数付けされ, 以降ステップを重ねても更新されることのない, 駐車スペー スの固定パラメータである. 図 3.4 の矢印のように, 駐車場で入口に戻る経路の長さの 2 倍を基準の長さとする. 出口 の位置を 100 点とし, 遠ざかるごとに 100 を基準の距離で割った点を線形的に減点する. ま た, 駐車場の入口に戻る経路に接する駐車スペースの点数に関しては, 出口の位置を 0 点と し, 遠ざかるごとに 0 点から 100 を基準の距離で割った点を線形的に加点する. 図 3.4 出口との距離による点数付け 11 3.3.3 自動車エージェントの位置による点数付けの設定 本シミュレーションにおいて, この点数は駐車場内のルートを考慮しない. 自動車エー ジェントの位置から駐車場内でもっとも遠い駐車スペースまでの X 座標と Y 座標の距離の 和を基準の距離とする. 現在の自動車エージェントの位置が 100 点, 最も遠い位置にある駐 車スペースが 0 点となるように, 100 を基準の距離で割った点を線形的に減点させる. 各自 動車エージェントに固有の点数であり, 毎ステップ更新される. また, 自動車エージェント の進行方向と反対方向にある駐車スペースに関してのみ全て 0 点とした(図 3.5). 図 3.5 現在の自動車との距離による点数付け 12 3.4 自動車エージェントの設定 本研究では, 駐車場全体の動きを表現するため, 自動車は駐車場の混雑状況や, 他の自動 車の動きに応じた駐車挙動を行うモデルを考える. より現実に近い駐車挙動をさせるため に自動車エージェントにいくつかの定数パラメータと変数パラメータを設定する. 定数パラメータは以下の 3 つである. ・ 駐車スペースの点数に自動車エージェントの個性を持たせるための「好み」 (本節 a 項) ・ 自動車エージェントが混雑を回避するかを振り分ける「混雑回避」(本節 c 項) ・ 自動車エージェントの駐車時間を表す「駐車ステップ数」 (本節 d 項) また, 変数パラメータは以下の 5 つである. ・ 目的マスの「点数」「XY 座標」と「通過通路」 (本節 b 項) ・ 自動車エージェントの「状態」(本節 d 項) ・ 自動車エージェントが前進する方向を表す「Direction」(本節 e 項) ・ 自動車エージェントの視野内に入り認識された駐車スペースの「点数」「XY 座標」(本 節 f 項) ・ 自動車エージェントが駐車行動に移るしきい値となる「妥協ポイント」(本節 g 項) 本節ではこれらのパラメータを用いた自動車エージェントの駐車挙動について説明する. a) 総得点の決定 ドライバーが駐車スペースを決定する際に「エントランスに近い」 「帰るとき出やすい」 「他に空が無い」という理由で決定していることが多い[1]. このことから各点数に別々 の割合を与え, 各駐車スペースの総得点を決定する. さらに, 個人差を考慮して自動車エージェントが生成される際に自動車に好みを設定 する. エントランスとの距離をできるだけ重視するドライバーや, 駐車場内を動き回る ことを避けるドライバーがいると考え, 「エントランスとの距離を重視」, 「スタンダ ード」, 「現在地との距離を重視」の 3 つを好みとして設定する. 好みによる点数の割合は表 3.1 の通りである. 表 3.1 総得点の重み付け 総得点 エントランスとの距離 好み エントランスとの距離 出口との距離の 現在地との距離の の得点 得点 得点 0.70 0.15 0.15 スタンダード 0.60 0.10 0.30 現在地との距離を重視 0.50 0.15 0.35 を重視 13 b) 目的マスの決定 自動車エージェントは, 通路選択通路 A と通路 0∼4 の交差部にいる場合, 通路 0∼4 にいるとする. 例えば, 通路 2 にいる場合, 通路 2∼4 にある駐車スペースの中で, 通路 4 にいる場合は通路 4 にある駐車スペースの中で 最も点数の高い駐車スペースを目的 マスとする. また, 通路 0 にいる場合, 通路 0∼4 にある駐車スペースの中で最も点数 の高い駐車スペースを目的マスとする. 自動車エージェントは目的マスの点数と座標 をパラメータとして記憶し, その目的マスに向かって進む. 目的マスは毎ステップ更 新する. また, 自動車エージェントは駐車することなく通過した通路を通過通路パラメータ に記憶し, その通路に面する駐車スペースの点数を 0 点にする. これによって, 通過し た通路に面する駐車スペースが目的マスとされることがなくなる. 本シミュレーショ ンにおいては自動車エージェントが入口を 4 回通過すると記憶した通過通路パラメー タはリセットされるよう設定する. c) 通路分岐時の選択 自動車エージェントが通路の分岐点に来たときの経路選択について説明する. 自動 車エージェントは分岐点において, 目的マスが通路の方向にある場合と, その通路に 駐車することを決定した駐車スペースが有る場合に, 通路選択通路 A から通路へ進む よう設定する. さらに, 通路 1∼3 の入口付近における, 駐車スペースの駐車密度によ っても影響を受けるものとする. 本シミュレーションにおいては, 図 3.9 のように, 入 口付近の 10 個の駐車スペースによって判断する. 自動車エージェントは, 分岐点に来たとき, 通路 1∼3 の入口付近における, 駐車ス ペースに対する駐車している自動車エージェントの密度を計算する(通路 2 の分岐点 にいる場合, 通路 2 入口付近の密度のみを計算する). それによって, その通路に面す る駐車スペースの点数を減点させる. 自動車エージェントは, 目的マスの点数が減少 したことによって, 他の通路にある駐車スペースを新たな目的マスとする可能性があ る. 自動車エージェントは新たな目的マスを目指して通路選択通路 A から通路へ進む ことを避ける. さらに, 自動車エージェントごとに, 通路 1∼3 の入口付近の混雑に影 響されるかを混雑回避パラメータに振り分ける. 本シミュレーションにおいては, 混 雑による影響を受ける自動車エージェントは, 分岐点において, 通路 1∼3 に面する駐 車スペースの点数から, ( 6 × 通路入口付近に駐車している台数の密度 )点を減点する 14 (通路 2 の分岐点にいる場合, 通路 2 に面する駐車スペースのみを減点する). また, 本シミュレーションの駐車場レイアウトにおいて, 通路 4 まで来た自動車エー ジェントは, そこまでの分岐点において, 通路 1∼3 が混雑しているものと考えた自動 車エージェントである. そのため, 通路 4 まで来た自動車エージェントは, 通路 4 が満 車で停められない場合を除いて, 必ず駐車するように設定する. これにより, 通路 4 に 来るまでに, 駐車スペースを見つけることができなかった自動車エージェントを比較 することができる. 図 3.9 分岐時における点数の減点 15 d) 自動車エージェントの状態設定 各自動車エージェントには「探索」「駐車」「一時停止」「完全停止」「出庫」「退場」 の 6 つの「状態」を設定する. 1) 探索 駐車場に入場して来た最初の状態である. 自動車エージェントは, 現在地による 点数付け(3.3 節), 総得点の計算(本節 a 項), 自動車エージェントが駐車したい と考える目的マスの決定(本節 b 項), 駐車マスの認識(本節 f 項), 妥協ポイント の増加(本節 g 項), 駐車行動に移ろうとする駐車スペースの決定(本節 h 項)を行 う. 本シミュレーションにおいて最も重要とされる部分である. 駐車スペースが決定されると「駐車」になる. 2) 駐車 状態「探索」で決定された駐車スペースに移動している状態である. 自動車エージ ェントが, 決定した駐車するスペースの前に来たとき, 再度自動車エージェントの 前方の駐車スペースを認識し, 駐車しようとしていた駐車スペースよりも点数の高 い駐車スペースがあった場合, その駐車スペースを新たに目的マスとし, そこまで 移動する. より点数の高い駐車スペースがない場合, 現在認識している駐車スペー スに駐車を開始し, 5 ステップ後, 状態が「完全停止」になる. また, 決定された駐車 スペースの前に到着する前に, 他の自動車エージェントがその駐車スペースに駐車 行動を開始した場合, 自動車エージェントの状態は, 「探索」に戻る. 3) 一時停止 自動車エージェントが前進できなかった場合にこの状態になる. 前進できるよう になった場合は, 一時停止する直前の状態に戻る. 4) 完全停止 駐車が完了し,ドライバー不在で動かない状態を完全停止とする. 関数 _GetCountStep により, 駐車ステップ数の間はこの状態である. つまり自動車エー ジェントの駐車時間は完全停止状態での時間である. 駐車ステップ数を終えた後, 関数_ViewCountAgent により自動車エージェントが出ようとしている通路の 2 マス 後方に他の自動車エージェントが無いならば状態「出庫」になる(図 3.6). 5) 出庫 駐車したスペースから通路に出るための状態である. 通路に出ると状態が「退場」 になる. 6) 退場 駐車場の出口に向かう状態である. 16 図 3.6 出庫可能な場合 e) 自動車の前進 1) 状態「一時停止」「完全停止」以外のときのみ前進する. 2) 自動車エージェントのパラメータ Direction(方向)と関数_ViewCountAgent により, 図 3.7 のように前方の 2 マスが空いているかを確認し, 空いていれば 1 マス前進する. 3) 通路の合流部においては, 関数_ViewCountAgent により, 合流先の通路の前 1 マス と, さらにその 2 マス右側に他の自動車エージェントがいない場合のみ前進する(図 3.8). 図 3.7 自動車が前進できる場合の条件 図 3.8 合流部における前進可能な場合 17 f) 駐車スペースの認識 自動車エージェントが現在いる位置から見える範囲, すなわち視野を MAS のコレク ション機能および関数_CollectAround を 2 回用いることによって設定する. 本シミュ レーションにおいて, 視野として認識するのは, 自動車エージェントから 1 マス前方と 4 マス前方のマスを中心した範囲である(図 3.10). 範囲内にある「空」の駐車スペー スの中で点数が一番大きい駐車スペースの点数と XY 座標をパラメータとして取得す る. また, 基本的に自動車エージェントの進行方向の駐車スペースを認識するが, 通路 選択通路 A にいる場合のみ, 通路 1∼4 方向の駐車スペースを認識する. (-1 , -1) (0 , -1) (1 , -1) (-1 , 0) (0 , 0) (1 , 0) (-1 , 1) (0 , 1) (1 , 1) (-1 , -1) (0 , -1) (1 , -1) (-1 , 0) (0 , 0) (1 , 0) (-1 , 1) (0 , 1) (1 , 1) 図 3.10 自動車が認識する範囲 18 g) 妥協ポイントの設定 目的の駐車スペースに着く前に, 目的の駐車スペースに近い得点の駐車スペースがあれ ば, そこに駐車するためのしきい値として妥協ポイントパラメータを設定する. 自動車エ ージェントは周回が増えるごとに妥協ポイントが増加するように設定する. 本シミュレー ションにおいては初期段階では 5 ポイント, 1 周すると 8 ポイント増加, 2 周すると 50 ポイ ント, 3 週以上は 1 周するごとに 70 ポイントずつ増加する. 2 周以上すると空いている駐車 スペースを見つけたときに, その駐車スペースに駐車を決定すると考え, このように設定 する. h) 駐車スペースの決定 駐車スペースの決定は, 目的駐車スペースの総得点と視野により認識した最高得点の差 が妥協ポイント以下だった場合に行われる. 19 3.5 駐車場案内システムの設定 本シミュレーションにおける駐車場案内システムは, 各駐車スペースに「空」「満」を緑 赤で表す信号が設置されているものとする. 図 3.11 のように, このシステムが設置される ことにより, 自動車エージェントは駐車スペースに近づく前に駐車スペースの「空」「満」 が確認できるため, 無駄に移動することも減り, 自動車エージェントがより理想とする駐 車スペースに駐車することができる. 妥協でここに 駐車 (a) システムが無い場合 より理想に近い場所に 駐車 (b) システムが有る場合 図 3.11 駐車場案内システムの有無による違い 20 実装に関しては, システムの無い場合と同様に, 自動車エージェントが現在いる位置か らシステムによって見える範囲を, MAS のコレクション機能および関数_CollectAround に よって設定する. 本シミュレーションにおいて, このとき視野として認識するのはシステ ムが無い場合の 2.5 倍とする. 範囲内にある「空」の駐車スペースの中で点数が最も大きい 駐車スペースの点数と XY 座標を取得する. 3.6 出力の設定 本研究におけるシミュレーションの目的は, 駐車場案内システムの有無によってどのよ うな影響が表れるかを観察することである. それを確認するために, 次の 4 つの評価指標を 考える. 1) 駐車までの周回数 駐車場に入場してから駐車するまでに, 駐車場内を何周するかを出力する. 駐車場案内 システムにより, 早く駐車する駐車スペースを発見することができれば, 自動車エージェ ントの周回数は減少すると考えられる. 2) 一時停止したステップ数 自動車エージェントは, 駐車場内において渋滞が起きていたり, 前の自動車エージェン トの駐車によって通路が通れなかったり, または合流部において合流できない場合に一時 停止をする. 混雑していればより頻繁に一時停止するので, 駐車場案内システムにより混 雑が緩和されれば一時停止するステップ数は減少すると考えられる. 3) 入場から駐車までのステップ数 駐車場に入場してから駐車スペースの決定し駐車行動に移るまでのステップ数を出力と する. 駐車場案内システムがあることによって, 自動車エージェントは, より早く駐車スペ ースを発見することができるためステップ数が減少すると考えられる. 4) 点数差 自動車エージェントが目標としていた駐車スペースの点数と実際に駐車したスペースの 点数の差を出力する. 駐車場案内システムがあることによって自動車が認識することがで きる駐車スペースが多くなるため, 自動車がより目標とする点数に近い点数を持つ駐車ス ペースに駐車できると考えられる. 21 第4章 シミュレーションの実行と比較 本章では, 第 3 章で作成したシミュレーションの実行と比較を行う. 駐車場案内システム が無い場合と駐車場案内システムが有る場合を実行し, 案内システムの有無による影響を 比較する. 4.1 案内システムが有る場合と無い場合の実行と比較 本シミュレーションは駐車場が開場してから満車になるまでを対象とし, 駐車場案内シ ステムが有る場合と, 駐車場案内システムが無い場合を実行し, 様子を比較する. ただし, 自動車エージェントが持つ定数パラメータ「好み」, 「混雑回避」, 「駐車ステップ数」と, 自動車エージェントの発生タイミングは, 駐車場案内システムの有無に関わらず同一であ るとする. 図 4.1, 図 4.2, 図 4.3, 図 4.4, 図 4.5 はステップごとの様子を表したもので, 左の図が駐 車場案内システムの無い場合の様子, 右の図が駐車場案内システムの有る場合の様子であ る. 図 4.1 のように, 駐車場案内システムが有る場合は, 駐車場案内システムが無い場合と比 べ, 出口とエントランスの両方に近い駐車スペースから埋まって行きやすい傾向があるこ とが見られる. これは, 駐車場案内システムが有ることによって, 自動車エージェントが通 路の奥にある高い点数を持つ駐車スペースを認識できたためだと考えられる. 22 図 4.1 500 ステップ時の様子 図 4.2 のように, 駐車場案内システムが有る場合は, 駐車場案内システムが無い場合と比 べ, 自動車エージェントは通路 4 に行きにくい様子が見られる. 自動車エージェントは通路 1∼3 の入口付近が混雑していると他の通路を選択する傾向が強まるが, 駐車場案内システ ムが有ることによって, 通路 4 に行く手前で駐車スペースを発見できる. これにより, 通路 の入口付近が混雑していても, 他の通路を選択することが減ったため, 通路 4 に行く自動車 エージェントの台数も減ったと考えられる. また図 4.3 においても同様のことが言える. 23 図 4.2 1000 ステップ時の様子 図 4.3 1500 ステップ時の様子 24 図 4.4 2000 ステップ時の様子 図 4.5 終了時の様子 25 4.2 各出力の比較と考察 4.2.1 比較 1) 駐車までの周回数の比較 駐車場案内システムが有る場合と無い場合において, 駐車までの周回数を比較する. 図 4.6 のように, 駐車場案内システムが無い場合と比べ, 駐車場案内システムが有る場 合の 0 周目で駐車できる自動車エージェントの割合は約 10%多くなっている. 分岐点に おいて, 自動車エージェントは通路 1∼3 の入口付近の駐車割合でその通路に進行するか を選択し, 混雑している場合はその通路を避ける. 駐車場案内システムが有る場合は, 駐 車場案内システムが無い場合よりも通路の奥の方の駐車スペースを認識できるため, 自 動車エージェントは, 0 周目でその通路にある高い点数を持つ駐車スペースを発見できる と考えられる. また, 駐車場案内システムが無い場合の自動車エージェントの平均周回 数は 0.56 周, 駐車場案内システムが有る場合の自動車エージェントの平均周回数は 0.45 周となった. しかし, 駐車場内を 2 周してから駐車する自動車エージェントの割合は, 駐車場案内シ ステムの有無による違いは見られない. 本シミュレーションにおいて, 通路に面してい て空状態の駐車スペースの数と, 通路にいる他の自動車エージェントの数を比較できな いためであると考えられる. 駐車場案内システムが有る場合は, 自動車エージェントは 通路の奥にある駐車スペースに駐車しやすくなる. しかし, 駐車スペースに到着する前 に, その通路に存在した他の自動車エージェントが, 目的の駐車スペースに駐車してし まうことにより駐車できなくなり, 周回が増えてしまうと考えられる. 100% 90% 80% 70% 60% 0周 1周 2周 50% 40% 30% 20% 10% 0% システム無し システム有り 図 4.6 駐車までの周回数の比較 26 2) 一時停止したステップ数の比較 駐車場案内システムが有る場合と無い場合において, 駐車までに一時停止したステッ プ数を比較する. 図 4.7 のように, 駐車場案内システムが有る場合は, 駐車場案内システムが無い場合よ りも, 駐車までの一時停止ステップ数が 2 ステップ以下で駐車できる自動車エージェン トの台数が多い. 駐車場案内システムが有ることによって, 駐車場内の混雑が解消され, 自動車エージェントが一時停止するステップ数が減少すると考えられる. また, 駐車場 案内システムが無い場合の自動車エージェントの一時停止したステップ数は平均 1.1 ス テップ, 駐車場案内システムが有る場合の自動車エージェントの一時停止したステップ 数は平均 0.7 ステップとなった. 200 180 160 140 台数 120 システム無し システム有り 100 80 60 40 20 0 2 4 6 8 10 12 ステップ数 14 16 18 図 4.7 一時停止したステップ数の比較 27 20 3) 入場から駐車までのステップ数 駐車場案内システムが有る場合と無い場合において, 駐車場に入場してから, 駐車まで にかかるステップ数を比較する. 駐車場案内システムが有ることによって, 自動車エージ ェントは, より早く駐車スペースを発見できるためステップ数が減少すると考えられる. 図 4.8 のように, 駐車場案内システムが有る場合は, 駐車場案内システムが無い場合より も, 入場から駐車までのステップ数が 40 ステップ以内で駐車できた自動車エージェントの 台数が多くなっている. また, 41 ステップ以上で駐車した自動車エージェントの台数は, 駐 車場案内システムが無い場合の方が全体的に多くなっている. これは, 駐車までの周回数 が減少したことと同様に, 駐車場案内システムが有る場合は, 駐車場案内システムが無い 場合よりも通路の奥の方の駐車スペースを認識できるためだと考えられる. 自動車エージ ェントは, 少ないステップ数でその通路にある高い点数を持つ駐車スペースを発見できる ため, 無駄に移動すること減ったと考えられる. 駐車場案内システムが無い場合の自動車エージェントの入場から駐車までのステップ数 は平均 62.2 ステップ, 駐車場案内システムが有る場合の自動車エージェントの入場から駐 車までのステップ数は平均 54.3 ステップとなった. 160 140 120 台数 100 システム無し システム有り 80 60 40 20 0 0∼40 41∼80 81∼120 121∼160 ステップ数 161∼200 図 4.8 入場から駐車までのステップ数の比較 28 201∼240 4) 点数差の比較 駐車場案内システムが有る場合と無い場合において, 自動車エージェントが目標として いた駐車スペースの点数と実際に駐車した駐車スペースの点数差を比較する. 点数差が少 ない方が, 自動車エージェントにとって理想的な場所に駐車できたことになり望ましい. 図 4.9 のように, 駐車場案内システムが有る場合は, 駐車場案内システムが無い場合より も, 点数差が 4 点以下の駐車スペースに駐車できる自動車エージェントの数が多くなって いる. 逆に, 点数差が 5 点以上の駐車スペースに駐車する自動車エージェントの数は, 駐車 場案内システムが無い場合の方が多くなっている. 駐車までの周回数が減少したことと同 様に, 駐車場案内システムが有る場合は, 駐車場案内システムが無い場合よりも通路の奥 の方の駐車スペースを認識できるため, 自動車エージェントは, 自分の目標とする駐車ス ペースの点数に近い点数を持つ駐車スペースを発見することが容易になったと考えられる. また, 駐車場案内システムが無い場合の自動車エージェントの点数差は平均 7.2 点, 駐車 場案内システムが有る場合の自動車エージェントの点数差は平均 0.5 点となった. 120 100 台数 80 システム無し システム有り 60 40 20 0 0∼4 5∼9 10∼14 15∼19 20∼24 25∼29 30∼34 35∼40 点数差 図 4.9 点数差の比較 29 4.4.2 考察 駐車場案内システムが有る場合, シミュレーション開始直後で, 多くの駐車スペースが 空き状態である頃は, 自動車エージェントは駐車スペースを選択する際に, 駐車場案内シ ステムが無い場合よりも, 目標とする駐車スペースの点数に近い点数を持つ駐車スペース への駐車が容易になり, 点数差が小さくなりやすいと考えられる. 同様に, 周回を重ねるこ となく, 自動車エージェントの妥協できる駐車スペースが見つかり, 周回数や入場から駐 車までのステップ数が少なくなると考えられる. これらが駐車場全体の混雑解消につなが り, 一時停止したステップ数も少なくなると考えられる. しかし, 本シミュレーションのレイアウトにおいては, 駐車場案内システムが有る場合 も無い場合も駐車場の中心部から埋まっていくため, ある程度駐車スペースが埋まってく ると, 空状態の駐車スペースは駐車場の外側にのみになってしまう. この時は, 本シミュレ ーションで設定した駐車場案内システムは効果的ではなくなってしまうと考えられる. 30 第5章 5.1 おわりに まとめ 本研究では, マルチエージェントモデルを用いて, 駐車場内における,自動車の駐車スペ ース選択挙動と, 駐車場案内システムによる選択行動への影響をモデル化した. 駐車スペースごとに, エントランスからの距離, 出口からの距離, 自動車エージェントか らの距離を点数化, 自動車エージェントの変数定義, 自動車エージェントに駐車場内での 状態の設定, 駐車スペースの認識の設定, 分岐点における通路選択の設定, 妥協ポイントに よる駐車判定のしきい値の設定, 駐車場案内しシステムの設定, 各出力の設定を行った. こ れらの設定を実装し, 駐車場案内システムが有る場合と, 駐車場案内システムが無い場合 において実行と比較を行った. 本研究における駐車場案内システムは, 各駐車スペースに「空」「満」を表示させるとい うものであるが, 駐車場に駐車する際のドライバーによる, 少しでも早く駐車したいとい う願望を満たす助けになっていることが分かった. 5.2 今後の課題 今後の課題を以下に示す. ・ 誘導員による案内や通路ごとに信号を設置する, 入口に「空」「満」を表示する地図を 設置する等の, 本研究で実装した駐車場案内システムとは異なった, 駐車場案内シス テムを実装する. ・ 本研究とは異なる設定でのシミュレーションを行う. ・ 通路に既に存在する他の自動車エージェントがどこに駐車するかを予測し, その駐車 スペースを避けるモデルの構築をする. ・ 収容台数がさらに多く, より複雑な構造を持つ駐車場に対応できるように改良する. 31 謝辞 本研究を進めるにあたり, 多くのご指導ご助言をいただいた中央大学理工学部情報工学 科の田口東教授, 鳥海重喜助教に心から感謝いたします. また, 多くのご助言, ご協力をい ただいた柄沢聡太郎氏をはじめとする,田口研究室の皆様に心から感謝いたします. 参考文献 [1] 赤津典生, 金利昭, 山田稔, 野口大輔, “駐車挙動を反映した駐車場内ミクロシミュレー タの開発と適用性評価”, 第 27 回交通工学研究発表会論文報告集, 2007 年 10 月, No.59, pp. 233-236. [2] 森下信, 西山祐二, 栗山浩一, 大釜みち代, “駐車場及び周辺道路の交通シミュレーショ ン”, 日本計算工学会論文集, (オンライン), 入手先<http://save.k.u-tokyo.ac.jp/jsces/trans/trans2000/trans2000j.html> 32
© Copyright 2026 Paperzz