第3週
インパルス応答とコンボリューション
【教科書 p. 13~】
目標
インパルス応答を理解し,システムの特性と入出力関係を表すコンボリューションの式を導出する
インパルス応答
線形システムの特性は,基本的信号であるインパルス信号をシステムに入力したときの出力信号
で表現することができる.
この出力信号を,インパルス応答(impulse response)と呼ぶ.
インパルス応答に関しては,
線形システムの特性はインパルス応答によって完全に記述される
という重要な性質がある.インパルス応答がわかれば,与えられた入力信号に対して,どのような出力信号
が得られるかを予測することや,逆に出力信号から入力信号を推定することも可能になる.
特に,時間によって性質が変わらない時不変(time invariant)*なシステムでは,どの時刻にインパルス
信号を入力しても応答の形は変わらず,入力した時刻に応じて時間シフトされるだけである.つまり,時不
変な線形システムでは,時間原点に存在するインパルス信号に対する出力信号だけでシステムの特性が記述
できる.そこで,時間原点に存在するインパルス信号に対する出力信号をインパルス応答と呼ぶ.一方,特
性が時間で変化する時変(time variant)性も考慮した一般的なシステムでは,インパルス応答はインパルス
波形を加える時刻によって異なることに注意しなければならない.
インパルス応答の定義(連続時間・時不変システム)
h(t ) = L {δ (t )}
1
(3-1)
2
(3-2)
インパルス応答の定義(連続時間・時変システム)
h(t ′; t ) = L {δ (t − t ′)}
連続時間システムのインパルス応答とコンボリューション
時不変システムでは,インパルス応答 h(t ) が与えられたとき,入力信号 x (t ) と出力信号 y (t ) の間には,
以下に示す重要な関係式が成立する.
+∞
y (t ) = ∫ x(t ′) ⋅ h(t − t ′)dt ′
3
−∞
(3-3)
連続時間システムにおける式(3-3)をコンボリューション(convolution),あるいは畳み込み積分
(convolution integral)と呼び, y (t ) = x(t ) ∗ h(t ) のように表す.
*
一般的には信号のシフトに対して性質が変化しないという意味で,シフト不変性(shift invariant)と呼ば
れる.
線形システム入門
講義資料
3-1
コンボリューションの式の導出(重要!). 【教科書 p. 14】
①方形波による信号 x(t ) の近似式を考える.
x (t ) ≈
+∞
∑ x(n ⋅ ∆t ) D∆t (t − n ⋅ ∆t )∆t
(3-4)
n = −∞
②出力 y (t ) の近似式を考える
時刻 t = 0 に中心を持つ幅 Δt 振幅 1 / Δt の方形波 D∆t (t ) に対する出力信号を h∆t (t ) とする.
時間によって特性が変わらないシステムでは,
D∆t (t ) を入力→ h∆t (t ) が出力
D∆t (t − n ⋅ ∆t ) を入力→ h∆t (t − n ⋅ ∆t ) が出力
システムが線形なので,
+∞
y (t ) = L{x(t )} ≈ L
x(n ⋅ ∆t ) D∆t (t − n ⋅ ∆t )∆t
n =−∞
+∞
= L
x(n ⋅ ∆t ) D∆t (t − n ⋅ ∆t )∆t
n =−∞
∑
∑
=
+∞
∑
n =−∞
x ( n ⋅ ∆t ) ⋅ L { D∆t (t − n ⋅ ∆t )}∆t =
+∞
∑ x ( n ⋅ ∆t ) ⋅ h
∆t
n =−∞
(t − n ⋅ ∆t )∆t
(3-5)
となり,
y (t ) ≈
+∞
∑ x ( n ⋅ ∆t ) ⋅ h
∆t (t
− n ⋅ ∆t )∆t
(3-6)
n = −∞
が導き出される.
h∆t ( t − n ⋅ ∆t ) を x ( n ⋅ ∆t ) ∆t 倍して重ね合わせたもの
③ Δt → 0 の極限
∆t → 0 では,
D∆t (t − n ⋅ ∆t ) →δ 関数
h∆t (t ) →インパルス応答 h(t ) に
和→積分の形
y (t ) = lim
+∞
Δt →0
∑ x ( n ⋅ ∆t ) ⋅ h
∆t (t
− n ⋅ ∆t )∆t =
n = −∞
∫
+∞
−∞
x (t ′) ⋅ h(t − t ′) dt ′
(3-7)
以上より,
+∞
y (t ) = ∫ x(t ′) ⋅ h(t − t ′)dt ′
−∞
が導き出された。
4
δ関数による信号の分解の式(2-5),
x (t ) =
∫
∞
−∞
x (t ′) ⋅ δ (t − t ′)dt ′
とコンボリューションの式(3-3)を比較すると,入力信号 x (t ) を構成しているインパルス信号成分のう
ち時刻 t = t ′ の成分 δ (t − t ′) が,出力信号 y (t ) を構成する成分 h(t − t ′) に置き換わっていることがわかる.
つまり,
3-2
線形システム入門
講義資料
y (t ) = L{x (t )} = L
=
∫
∞
−∞
∫
∞
−∞
x (t ′) ⋅ δ (t − t ′)dt ′
x (t ′) ⋅ L{δ (t − t ′)}dt ′ =
∫
∞
−∞
x (t ′) ⋅ h(t − t ′)dt ′
(3-8)
としても,コンボリューションの式が導出できる.また,時刻 t = t ′ を中心とする幅 dt ′ の微小な領域の寄
与が加重和の重み x(t ′)dt ′ になっていることから,入力信号 x (t ) がコンボリューションにおけるインパルス
応答波形の線形和の密度関数となっていると解釈できる.
コンボリューションは,線形並進不変な連続時間システムにおける入力と出力を結びつける重要な関係式
である.この式は,δ関数で表される理想的なインパルス波を入力して得られるインパルス応答がわかってい
れば,与えられた入力信号に対する出力信号が計算できることを示している.
δ関数とコンボリューションの性質
【教科書 p. 16】
δ関数は以下のような性質を持つ.
ⅰ)δ関数と関数の積の積分(δ関数の定義2)
∫
∞
−∞
f (t )δ (t −t 0 )dt = f (t0 )
(3-9)
関数 f (t ) と t = t 0 に値を持つδ関数 δ (t − t 0 ) を乗算したものを積分すると,関数の t = t 0 での値 f (t 0 )
が得られる.ただし関数 f (t ) は t = t 0 で連続なものとする.
この性質は,信号の与えられた時点での値を取り出すサンプリングの操作を,数学的にモデル化する
際に利用される.また,式(3-9)はδ関数の定義の1つになっている.
δ関数のカッコの中がゼロになるときの関数の値が出てくる
+∞
∫− ∞ f(t)δ(t −t0 )dt = f(t 0 )
t = t0 にのみ値を持つδ関数
関数の t = t0 での値
(ただし関数 f(t)は t = t0 で連続)
5
ⅱ)δ関数を含むコンボリューション
f (t ) ∗ δ (t − t 0 ) = f (t − t 0 )
6 (3-10)
関数をシフトする操作は,δ関数とのコンボリューションにより数式化できる
iii)コンボリューションの可換性
x(t ) ∗ y (t ) = y (t ) ∗ x(t )
(3-11)
コンボリューションには,乗算のような可換性がある
線形システム入門
講義資料
3-3
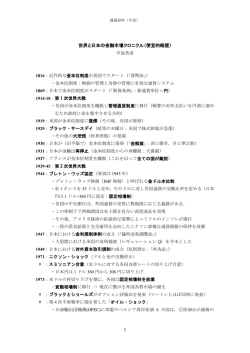
線形で時不変なシステムを考える
D Δt(t) を入力したら
hΔt(t) が出力
L{⋅}
xΔt(t)
yΔt(t)
x(t) を階段波形で近
似したもの
⋅⋅
+
↑こういう複雑な信号ではなく,単純
な信号に分解して考えよう!
x(0)D Δt(t)Δt
=
=
L{⋅}
⋅⋅
+
x(0)hΔt(t)Δt
L{⋅}
+
+
x(Δt)D Δt(t - Δt)Δt
x(Δt)hΔt(t - Δt)Δt
L{⋅}
+
+
x(2Δt)D Δt(t - 2Δt)Δt
x(2Δt)hΔt(t - 2Δt)Δt
L{⋅}
+
⋅⋅
⋅
+
+
⋅⋅
⋅
+
x(nΔt)D Δt(t - nΔt)Δt
x(nΔt)hΔt(t - nΔt)Δt
L{⋅}
x ∆t ( t ) =
=
+
⋅⋅
⋅
=
+
⋅⋅
⋅
+∞
∑ x ( n ⋅ ∆ t ) D∆ t ( t − n ⋅ ∆ t ) ∆ t ≈ x ( t )
n = −∞
y ∆t ( t ) =
補足の図
3-4
線形システム入門
講義資料
1
+∞
∑ x ( n ⋅ ∆ t ) h∆ t ( t − n ⋅ ∆ t ) ∆ t ≈ y ( t )
n = −∞
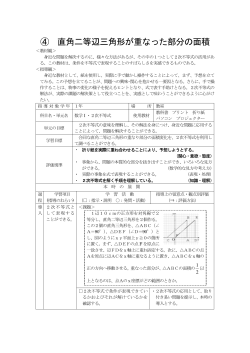
線形で時不変なシステムを考える
h(t) が出力
δ(t) を入力したら
L{⋅}
x(t)
y(t)
⋅⋅
+
幅が限りなくゼロに近い
パルス波形で分解する
x(0)δ(t)dt
=
=
L{⋅}
実は,これらの波形は
とても振幅の小さい波
形になるのだが,……
⋅⋅
+
x(0)h(t)dt′
L{⋅}
+
+
x(dt′ )h(t - d t′ )dt′
x(dt)δ(t - dt)dt
L{⋅}
+
+
x(2dt)δ(t - 2dt)dt
x(2dt′ )h(t - 2dt′ )dt′
L{⋅}
+
⋅⋅
⋅
+
+
⋅⋅
⋅
+
x( t′ )δ(t - t′ )dt
x(t′ )h(t - t′ )dt′
L{⋅}
+
⋅⋅
⋅
x(t ) =
∫
∞
−∞
+
⋅⋅
⋅
=
=
限りなくゼロに近いステップ幅(つま
り連続)での総和なので,Σでは
なく積分∫になる。
x (t ′)δ (t − t ′) dt ′
y (t ) =
補足の図
∫
∞
−∞
x (t ′)h (t − t ′) dt ′
2
線形システム入門
講義資料
3-5
演習問題
問1.①~③が成り立つことを示せ。
∫
①
∞
−∞
f (t )δ (t −t 0 )dt = f (t0 ) (式 3-9)
② f (t ) ∗ δ (t − t 0 ) = f (t − t 0 ) (式 3-10)
③ x(t ) ∗ y (t ) = y (t ) ∗ x(t )
(式 3-11)
ヒント:
②左辺をコンボリューションの定義式を使って表し,①の性質を使う
③例えば,左辺をコンボリューションの定義式を使って表し,積分変数を変換する
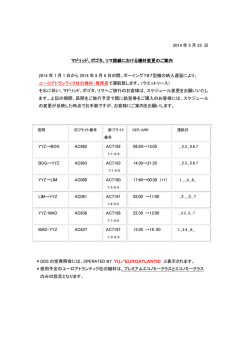
問2.以下の図にならって,①と②のδ関数を図示せよ.
3
2
δ (t )
1
0
-1
−2δ (t − 2)
-2
-3
-3
-2
-1
図1
0
3
2
2
1
1
0
0
-1
-1
-2
-2
-3
3-6
-1
0
線形システム入門
1
t
3
② 2δ (t + 2) + 2δ (t − 2)
3
-2
2
δ関数の図示の例
① δ (t ) + 2δ (t − 1) − 3δ (t − 2)
-3
1
2
3
講義資料
t
-3
-3
-2
-1
0
1
2
3
t
問 3 信号 x(t ) が図2のように表示されているとして,x(t ) と δ (t ) + 2δ (t − 1) − 3δ (t − 2) とのコンボリュ
ーションで得られる信号の概形を図示せよ.
3
2
x(t )
1
0
-1
-2
-3
-3
-2
-1
0
図2
1
2
3
t
2
3
t
信号 x(t )
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
線形システム入門
講義資料
3-7
演習問題の解答例
問1
①
∫
①~③が成り立つことを示せ。
+∞
−∞
f (t )δ (t −t 0 )dt = f (t 0 )
② f (t ) ∗ δ (t − t 0 ) = f (t − t 0 )
③ x(t ) ∗ y (t ) = y (t ) ∗ x(t )
①幅 Δt 振幅 1 / Δt の方形パルス D∆t (t ) をシフトさせた信号 D∆t (t − t0 ) と信号 f (t ) の積の積分,
∫
∞
f (t ) D∆t (t − t0 )dt
−∞
を考える. D∆t (t − t0 ) は t = t0 を中心とする幅 ∆ t の区間内で値が 1 / ∆t ,それ以外でゼロとなるから,
∫
∞
f (t ) D∆t (t − t0 )dt = ∫
−∞
t0 +∆t / 2
t0 −∆t / 2
f (t )
1
1 t0 +∆t / 2
dt = ∫
f (t )dt
∆t
∆t t0 −∆t / 2
と整理できる.この式の右辺は「信号 f (t ) の t = t0 を中心とする幅 ∆ t の区間内での平均値」と解釈でき
る.平均区間の幅 ∆ t を限りなくゼロに近づけていくと,右辺の値は平均区間の中心 t = t0 での信号の
値 f (t0 ) に限りなく近づいていく.
(ここで f (t ) は t = t0 で連続と仮定しているから.
)つまり,
∞
lim ∫−∞ f (t ) D∆t (t − t0 )dt = f (t0 )
∆t → 0
となる.一方,
δ (t − t0 ) = lim D∆t (t − t0 )
・・・ δ (t ) = lim D∆t (t ) を忘れないでね。
∆t → 0
∆t → 0
なので,
∫
∞
−∞
∞
f (t )δ (t − t 0 )dt = ∫
−∞
{
}
f (t ) lim D∆t (t − t0 ) dt
= lim ∫
∞
∆t →0 −∞
∆t → 0
・・・ここで f (t ) は t = t0 で連続だから,
f (t ) D∆t (t − t0 )dt = f (t0 ) ・・・lim を積分の外に出せる
よって,①が示された.
D∆t (t ) が偶関数なので, ∫
∞
−∞
f (t )δ (t0 − t )dt = f (t0 ) も示すことができる。
「区間内の積分値」
t0 +∆t / 2
S ∫t0 −∆t /2 x(t )dt
=
∆t
∆t
「区間の幅」
∆t
t0 +∆t /2
S=∫
x(t )δdt
「区間の平均」: x
=
t0 −∆t /2
平均値は「区間内の総和を
区間の幅で割った値」
「区間内の総和」は,連続
な信号の場合,「区間内の積
分値 S」
線形システム入門
−∞
D∆t (t − t0 )
∆t
t
講義資料
「区間内の積分を区間の
幅∆t で割った値」は,
「x(t)に D∆t (t − t 0 ) を
乗算して区間[-∞,∞]で
積分した値」に等しい
1
∆t
x
t0
3-8
∞
x = ∫ x(t ) D∆t (t − t0 )dt
t
t0
D∆t (t − t0 ) は,区間内
で 1 / ∆ t ,区間外で 0 に
なるから・・・
②コンボリューションの式
x (t ) ∗ y (t ) =
∫
∞
−∞
x(t ′) ⋅ y (t −t ′)dt ′
に, x (t ) = f (t ) , y (t ) = δ (t − t 0 ) を代入して整理すると,
f (t ) ∗ δ(t − t0 ) =
∞
∫
f (t ′) ⋅ δ (t − t0 −t ′)dt ′
−∞
となる.δ関数の性質【ある関数に乗算して積分すると,δ関数の括弧の中がゼロになる時点での,その関数
の値が得られる】を使うと,
∫
∞
−∞
f (t ′) ⋅ δ(t − t0 −t ′)dt ′ = f (t ′) t ′= t − t0 = f (t − t0 )
となり,②が導き出される.
③ x (t ) ∗ y (t ) の式を変形していく.
x (t ) ∗ y (t ) =
∫
+∞
−∞
x (t ′) ⋅ y (t −t ′)dt ′
(1)
ここで,
t ′′ = t − t ′
(2)
とおいて積分変数を t ′ から t ′′ に変換すると,
dt ′ = −dt ′′
(3)
変数 t ′ を − ∞ ~ + ∞ に変化させたとき,変数 t ′′ は + ∞ ~ − ∞ と変化するので,
∫
∞
x (t ′) ⋅ y (t −t ′)dt ′ = −
−∞
=
=
∫
∫
−∞
∞
∞
−∞
∫
x (t − t ′′) ⋅ y (t ′′)dt ′′
(4)
x(t − t ′′) ⋅ y (t ′′)dt ′′
(5)
y (t ′′) ⋅ x(t − t ′′)dt ′′ = y (t ) ∗ x(t )
(6)
∞
−∞
よって, x (t ) ∗ y (t ) = y (t ) ∗ x (t ) が示された.
問2
図にならって,①と②のδ関数を図示せよ.
① δ (t ) + 2δ (t − 1) − 3δ (t − 2)
② 2δ (t + 2) + 2δ (t − 2)
以下のようになる
3
3
δ (t ) + 2δ (t − 1) − 3δ (t − 2 )
2
1
1
0
0
-1
-1
-2
-2
-3
-3
-2
-1
0
1
2
2δ (t + 2) + 2δ (t − 2)
2
3
t
-3
-3
-2
-1
0
1
2
線形システム入門
3
t
講義資料
3-9
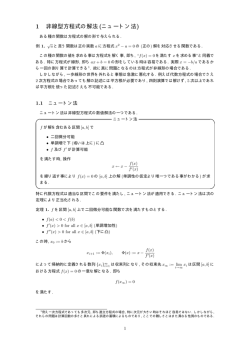
問3
信号 x(t ) が図のように表示されているとして, x (t ) ∗ {δ (t ) + 2δ (t − 1) − 3δ (t − 2)}を図示せよ.
x (t ) ∗ {δ (t ) + 2δ (t − 1) − 3δ (t − 2)} = x (t ) + 2 x (t − 1) − 3x (t − 2) より,図のようになる.
3
x(t ) ∗ {δ (t ) + 2δ (t − 1) − 3δ (t − 2)}
2
1
0
-1
-2
-3
-3
3
-2
-1
0
1
2
3
t
x (t ) ∗ {δ (t ) + 2δ (t − 1) − 3δ (t − 2 )}
2
1
0
x (t )
-1
2 x ( t − 1)
− 3 x (t − 2)
-2
-3
-3
3-10
線形システム入門
-2
講義資料
-1
0
1
2
3
t
© Copyright 2026 Paperzz