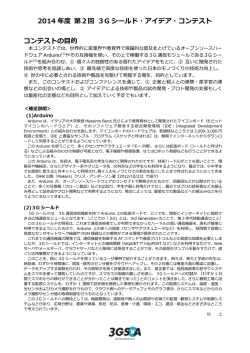
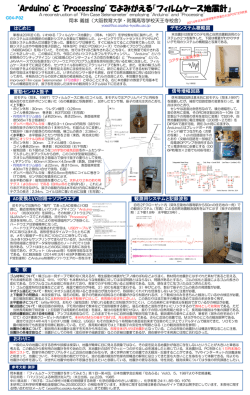
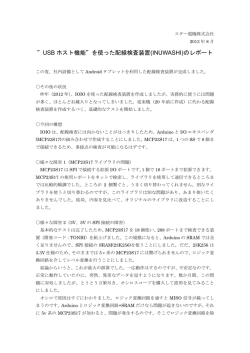
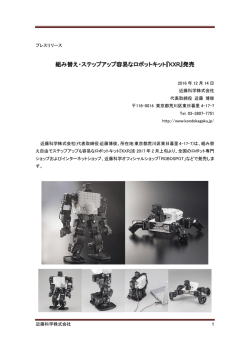
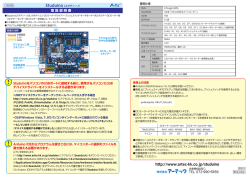
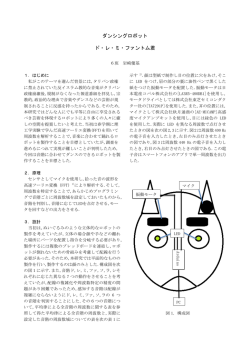
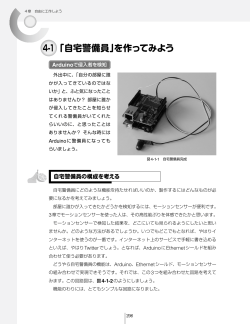
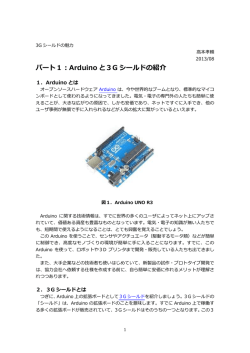
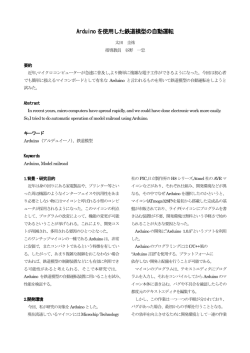
Arduino を使ってヘビ型ロボットを作る 6 班 林龍也 1.はじめに 3.再現方法と材料 ヘビは足や車輪を使わずに移動することができる。 ヘビは上記のような蛇行運動に必要なエネルギと その移動手段は種類によって様々だが、大きく分け 自由度を、多量の関節と筋肉によって供給している。 て蛇行運動、アコーディオン運動、横ばい運動、直 蛇行運動の再現において、実物のヘビのように多 進運動の四種類に分けることができる。 量の関節を制御しきることは難易度が高い。よって この中で、水中でも生かすことのできる動きは蛇 ヘビの体をある程度簡略化する必要がある。今回は 行運動である。この動きをロボットで再現すること 再現においてどの程度簡略化できるかを、筋肉の代 で歩行や車輪、キャタピラなどでは走破できない悪 わりに使うモータの数を変えて関節一つ一つを作成 路や水中などを進み、安全に調査することができる した。 ようになる。実際にこのヘビ型ロボットは日本、ア 関節にただ一つだけのモータを使う場合、体を メリカやヨーロッパなどで開発が進んでいる。 浮かせるためにリンク機構を用い、体が曲がると同 今回は前述した蛇行運動による前進を、Arduino 時に関節を傾けることで接地面を浮かせるという方 を用いて再現しようと考えた。 式を採用した。(図2参照) 関節にモータを二つ採用する場合は体のうねり 2.蛇行運動のメカニズム を作るためのモータ(左右への運動用)と体を浮か 蛇行運動の仕組みは図1のように身体を正弦波状 せるためのモータ(上下運動用)を用いた。 (図3参 に曲げて進むと近似できる。すると図1の体の各部 照) でその部分の接線に平行な運動ベクトルが発生する。 (進行方向を正とする)この時に図1の赤い部分(体 の中で曲率が高い部位)を地面から浮かせることで 体の運動ベクトルを二方向だけに制御をする。この 二種のベクトルは進行方向に対して斜めの方向を向 いているが進行方向を対称の軸として線対称である ためベクトルの分解を行うと進行方向に垂直な成分 は異なるベクトル同士で打ち消しあい、進行方向に 平行な正の成分だけが取り出される。このようにし て蛇行運動は前進するための運動エネルギを得てい る。 図1.上から見た蛇行運動の略図とそのベクトル 図2.関節に一つのモータを採用した場合の略図 と側面から見たリンク機構の図 二つの方法に共通して用いた方法は体のうねりの 再現として先頭のモータの動きを時間差によって後 方のモータへと伝えていく、というものである。 (表 1参照)また、一つの関節部にモータを三つ採用す るという案はモータの最大制御数による制御できる モータの個数の限度と、それに伴う関節の個数の減 少という点があり蛇行運動はある程度の関節数がな ければベクトルの打ち消しが満足にできず成立しな いため採用は見送った。 図3.モータを二個用いた場合の本体 材料としては本体部分には共通してユニバーサル プレートを使用しうねりの再現には遊星歯車を用い たギヤボックスを使用した。本体を浮かせるために モータ一つの場合はユニバーサルアームを、モータ 二つの場合はシングルギヤボックスを用いた。動力 の伝達にはクラウンギヤを、モータの制御にはモー タードライバとして TA7245BP を使用したその他の 部分は基本的にユニバーサルプレートを切断・加工 したものである。二種のギヤボックスのトルク比は それぞれ順に 400:1、344.2:1 にした。 表1.左右制御のモータ回転方向 T 1 関節部① 正転 関節部② 停止 関節部③ 正転 2 反転 正転 停止 3 停止 反転 正転 4 反転 停止 反転 5 正転 反転 停止 6 停止 正転 反転 注)頭部に近い関節から①と番号を振った。 4.結果と考察 関節に一つだけのモータを使用した場合、体を浮 かせるためのリンク機構が自身の傾きに耐えられず ただうねるだけとなった。この原因としてリンク機 構の支点において自由度が1であるために回転と傾 きといった二方向への動作ができなかったためと思 われる。しかし自由度の高いリンク機構を作成する には時間が足りなかったためにこの方式は断念した。 モータを二つ使用した場合、動かしてみたところ 前進せずしばらくすると横倒しになってしまった。 この事柄はロボットのモデルの重心が高く、さらに 一輪という不安定な支えを用いている事を原因と考 えられる。 実験を通してヘビ型ロボットが前進する事はなか った。この理由としてモータ一つの場合は体全体が 接地してしまい、蛇行運動を再現できなかったこと。 モータ二つの場合は関節部の不足からなるベクト ル生成の不十分さによって進行方向へのベクトルを 抽出できなかったことが原因だと思われる。 ヘビの動きは一般的に腹部を下側に向け接地した 状態で動く方法である。よってヘビの動きに必要な 関節の自由度は上下左右の方向に動けるだけの分で よいと考えられる。そのため蛇行運動は今回の方法 で実現できると予想していたが、モータ二つによる 動きは蛇行運動ではなくスラローム状の動きに近い 動きの方が、実現が容易であると考えられた。 関節が少ない場合と多い場合での適切な動き方の 違いを検討する必要があるだろう。 実験を通してクラウンギアが空回りしたことが 多々あった。このためモータの回転周期のずれが生 じ体のラインが歪になってしまった事があった。こ の事から、より動力の伝達率の高い方式を採用する 必要があると思われる。 5.終わりに まとめとしてヘビ型ロボットに必要な事は、数多 くの関節・安定した構造・ロスの少ない動力の伝達 方法・間接支点の一点化であると思われる。 理論上は上下運動を使うことで段差を、左右どち らかの体の曲率を緩くすることで右折左折が行える ため今回の方式でヘビの動きを再現できると思われ た。 結局、ヘビ型ロボットが動く事はなかったが、こ のテーマで物を作るときに、対処しなければならな い課題にどう取り組むかを、今回の実験を通してわ ずかばかりでも見る事が出来た。 ヘビ型ロボットの完成に対してプログラム作成よ りも機構の構想、製作にかなりの時間を費やすこと となった。実際に物を作る際に構想を実現させる工 程を多めに取らなければならないと感じた。 参考文献 1)広瀬茂男 ロボット創造学入門 岩波ジュニア新書
© Copyright 2026 Paperzz