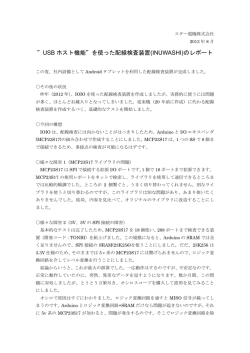
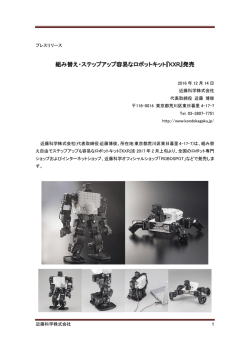
RSJ2014AC3G1-02 研究活動を始める前の学部生のためのトレーニング教育 ○小水内俊介 近野敦 (北海道大学) 1. はじめに 曲げセンサ ロボット教育は,初学者を対象として工学やロボッ ト技術に対する関心や知識を啓発することを目的とす る場合が多い.ここでは,一定の知識を修得した大学 生を対象として,座学から実践へのステップアップを 目的とした教育について考える.講義や実習で学びう る知識や技術は,研究活動で必要とされる水準とは隔 たりがある場合がある.実際のところ,研究室に配属 されたばかりの学部生がすぐに研究活動に取り組むの はハードルが高い. 筆者らは,本研究室に配属された直後の学部 3 年生を 対象として,研究活動を始める前のトレーニングという 位置づけでプロジェクト型教育を実施している.対象学 生が学部 3 年生であることから本プロジェクトは “B3 プロジェクト” と呼ばれ,基本的に自由参加ではあるが 対象学生たちは自主的に全員参加している.2012 年度 に実施したプロジェクトの実施概要と成果を紹介する. 2. B3 プロジェクト 2.1 実施内容 本プロジェクトの特色は,実際の研究活動に準拠し た “分野横断的な課題” に “共同作業” で “計画から発表 まで” 一貫して取り組むことである.実施期間は年度末 の約 3 ヶ月間 (実働約 1 ヶ月間) とした.2012 年度の 課題は,センサ類を搭載したグローブによってユーザ の手の動きを計測し,その計測情報に基づいてモニタ に表示された CG を操作するというものである.本課 題には下記三つの要素が含まれており,参加学生 3 名 がそれぞれ一人一役を担当した. • センサグローブの作成 • グローブと PC との間の通信 • PC 上での CG 描画 2.2 使用機材 図 1 に構築されたシステムの概観を示す.グローブ は人差指と薬指に曲げセンサを,手の甲に 3 軸加速度 センサと 3 軸ジャイロセンサからなる 6 軸 IMU を 搭載している.これらのセンサは Arduino UNO に接 続され,計測データを PC に転送している.PC では OpenGL を利用して CG を描画し,Arduino から受け 取ったデータに基づいて描画内容を変更する.具体的 には,ティーポットとそれを覆うキューブが描画され ており,両オブジェクトは IMU で計測された手の姿勢 と同じように回転する.また,人差指の曲げ具合に応 じて両オブジェクトが拡大縮小され (ズーム機能),薬 指の曲げ具合に応じてキューブの透明度が変わり中の ティーポットが見えるようになる (透過機能).本課題 では,試行錯誤の際の利便性や機材の再利用性を考慮 してブレットボードとジャンパワイヤを多用した. 第32回日本ロボット学会学術講演会(2014年9月4日~6日) CG 6軸IMU Arduino UNO 図 1 システムの概観 (a) ミーティング (b) 成果報告会 図 2 実施状況 2.3 実施状況 毎週ミーティングを行うことで進捗と課題の共有を 図った (図 2 (a)).ミーティングの際には資料作成や発 表の方法についても指導し,成果報告会やその後の研 究報告のためのトレーニングとした.また,報告内容 に対して学生同士の質疑応答を誘導し,現状の課題や 今後の方針について議論することを習慣とした.この 議論に基づいて機材の実装方法などを随時変更するこ とで,技術的な困難を克服し課題を推進した.結果と して,構想通りのシステムを計画通りの期間で作成し, 本プロジェクトを完了することができた. 2.4 成果 本プロジェクトのまとめとして研究室内で成果報告 会を実施した (図 2 (b)).口頭発表だけでなく,出席者 が実機を体験できるデモも用意した.デモ実施時には 実機の動作不良を解決することができず,一度撤収し たのち別室にて改めて出席者を集めるというトラブル があり,準備段階の重要性を再認識する機会を得た. 本プロジェクトの終了後,参加学生は個人的に電子 工作キットを購入したり,Android プログラミングに 取り組んだりと,様々な方向で技術的な意識の向上が 見られた. 3. おわりに 研究室配属直後の学部 3 年生を対象とした,研究活 動を始める前のトレーニングとしてのプロジェクト型 教育について紹介した.本プロジェクトの特色や実施 内容,使用機材,成果などを述べた.
© Copyright 2026 Paperzz