1
計算理論I(チュ
(チューリング機械と決定不能性)
リング機械と決定不能性)
平成21年度 第I期
ソフトウェア基礎学講座
安本 慶
慶一
2
スケジュール
講義日程(6回)
5月11,14,18,21,25,28日(月曜1限,木曜2限)
テスト:6月1日(月)1限 (資料,参考書持込可)
講義資料
¾ 以下のURLで配布
¾ http://ito-lab.naist.jp/~yasumoto/lecture/tm/
¾ 毎回の授業前に各自でダウンロード・印刷すること
参考書
1. Michael Sipser: “Introduction to the Theory of Computation, Second Edition,” Course
Technology, 2006 (Chapter 3 - 5)
2. 野崎,高橋,町田,山崎訳:“オートマトン言語理論 計算論II [第2版]” ,サイエンス社,2003
(第8章~9章)
3. 丸岡章:“計算理論とオートマトン言語理論”,サイエンス社,2005(第6章~7章)
4. 岩間一雄:“アルゴリズム理論入門”,昭晃堂,2001
1
3
その他
成績判定
¾オートマトン(伊藤先生担当分50点)+チューリング機械(安本担当分50点)の
合計 点 上を合格
合計60点以上を合格
質問など
¾在室時オフィスまで直接,または,e-mailにて随時
¾担当教員 (オフィス:A613 )
• 安本(yasumoto@is)
¾TA (オフィス:A616)
(オフィス A616)
• D2勝間(ryo-k@is),M2清川(kota-k@is),M2神山(naoya-k@is)
4
本講義の目的
計算機とは何か?何ができて何ができないのか?
¾究極に簡素化した数学的計算モデル(チューリング機械)を使って「計算可能性」を学ぶ
¾計算可能:問題に対し解を答える/「解がない」と答える計算手順(アルゴリズム)が存在
計算 能
解を答
「解がな
答
計算
ゴ ズ が存在
¾チューリング機械(TM):現代の計算機にいくらでもメモリ,時間を使えるとしたもの
¾計算可能性の定義:TMで計算できる⇔一般的に計算できる(他の定義とも一致)
¾計算できない問題がある(プログラムの停止性問題,ヒルベルト第10問題など)
計算量理論を学ぶための準備
¾計算量理論(アルゴリズムの実行時間や必要な記憶容量を数学的に扱う理論)は本講
義では扱わないが,学ぶためにはチューリング機械の知識が必須
• 多項式問題:問題サイズnに対し,計算量は多項式オーダ(O(n2)など)→実行可能
• NP完全問題:問題サイズnに対し,計算量は指数オーダ(O(2n)など)→実行不能
• 与えられた問題がNP完全であるかどうかの証明(計算理論IIIで学ぶ)
2
5
講義概要
チューリング機械(第1回~3回)
¾チューリング機械(TM)の定義:TM=FA+無限長の書換可能なテープ
¾TMとFA(有限オートマトン)との能力(解ける問題のクラス)の違い
¾TMの能力⊇現代の計算機の能力 ※処理速度は無視
¾TMへの機能拡張(拡張しても能力は変わらない)Æ標準TMは十分強力
• 複数テープ,非決定性,ランダムアクセスなどを拡張(アルゴリズムの記述は容易に)
¾TMによるアルゴリズムの記述法
計算機で解けない(決定不能)問題とその証明法(第4回~6回)
¾TMで解けない問題(=計算機で解けない問題)
解けな 問題( 計算機 解けな 問題)
¾万能チューリング機械: 任意のTMのプログラムを読み込んで実行するTM
¾ある問題(プログラムの停止性判定問題など)が決定不能なことを証明Æ 対
角線論法によりその問題を解くアルゴリズム(TM)が存在しないことを示す
¾帰着を用いた証明法:既知の決定不能問題の対象問題への変換により証明
6
1. チューリング機械
3
7
チューリング機械登場の背景
19世紀末~20世紀初頭 ヒルベルト・プログラム(D. Hilbert)始動
¾数学の全てを形式化し,数学全体の完全性と無矛盾性を示そうとする試み
¾ヒルベルトの23の問題(1900年)
第10問題:n 個の未知数を含む整数係数の多項式P(x1,…,xn)が与えられたとき,「方程
式P(x1,…,xn)=0が整数解を持つかどうか」を判定するアルゴリズムを考案せよ
例)6x3yz2+3xy2−x3−10=0のとき,解(x,y,z)=(5,3,0)が存在する
答え:そのようなアルゴリズムは,存在しない!
当時,“アルゴリズム”が何を意味するかは数学的に厳密に定義されておらず,直感
的なイメージ(意図した計算結果を得るための計算手順,等)が用いられていた.
Æ アルゴリズムを数学的に扱う枠組み
1936年 チューリング(A. Turing)がチューリング機械発表
¾あらゆる計算(すなわち,アルゴリズム)の形式化,数学的議論が可能に...
1940年頃 最初のプログラム可能な計算機登場
1945年 プログラム内蔵方式(J. von Neumann) (万能チューリング機械はその概念を先取り)
1946年 米ペンシルバニア大がENIAC開発
8
チューリング賞
コンピュータサイエンス分野のノーベル賞にあたる権威ある賞
¾優れた功績を残した人に年に1度,米国学会ACM (Association for Computing
Machinery)が贈る
¾賞金は10万ドル以上(Intel, Googleが後援)
近年の受賞者
2003年 Alan Kay Æ オブジェクト指向技術
2004年 Robert E. Kahn,Vinton G. Cerf Æ TCP/IP
2005年 Peter Naur Æ プログラミング言語ALGOL60の定義
2006年 Frances
F
E
E. All
Allen Æ コンパイラ最適化技術
2007年 Edmund M. Clarke,E. Allen Emerson,Joseph Sifakis Æ モデル検査技術
2008年 Barbara Liskov Æ プログラミング言語設計技術
4
9
チューリング機械(以下TMと略記)でできること
有限オートマトン(FA)で受理できない言語の取り扱い
¾L={0n1n}
¾L={w | w=wR}
これらの言語を受理するプログラムを
C言語などで作成するのは簡単,TMでももちろん可能
チューリング機械では,計算機で実行可能な任意のプログラムを,シン
プルなモデルで表現できる
¾TM=有限オートマトン+無限容量メモリ(無限長テープへの読み書き)
計算機で扱うあらゆる問題に対する計算可能性を数学的に議論
計算機 扱うあらゆる問題に対する計算可能性を数学的に議論
¾与えられた問題が決定不能(計算機で解けない/アルゴリズムが存在しない)であることを
数学的に証明
¾与えられた問題がどれくらい難しい(解くのに時間を要する)のかを解析
10
TMの入出力
有限オートマトンと同じく,TMは与えられた入力記号列wを受理するかどうかを判定
入力:w
動作:受理状態,拒否状態で停止
動作
受理状態 拒否状態で停止
または停止しない(無限ループ)
TM M
出力:受理で停止時のテープの内容
ÆM(w)と表記
TM Mが受理する入力の集合Æ受理言語と言い,L(M)と表記
¾L(M)は,∅(どの入力も受理しない), 有限集合,無限集合 のいずれか
¾どんなΤΜ Μ に対しても,その受理言語L(M)が存在し,一意に定まる
5
11
TMが扱う問題
TM Mは入力文字列wが,Mの受理言語L(M)に属しているかどうかを判定
言語とは何か?
言語とは何か
¾ある性質を持つ文字列集合(文字列に含まれる0の数と1の数が同じ,など)
¾すなわち,入力が,ある特定の性質をもつかどうかを判定する問題をTMは扱う.
本講義では,以降,言語への所属判定=判定問題,として扱う
例)言語L={素数の集合}を受理するTMは,問題「入力が素数かどうか」を判定する.
例えば以下の判定問題は全て言語として定式化でき,TMで扱うことができる
9プログラムの停止性判定問題
9グラフがオイラー閉路(全ての辺が一筆書きできる)を持つか
9論理関数 f(x1, x2, ..., xn)に対し,f(x1, ..., xn)=1となる各変数への割当て方は存在するか?
12
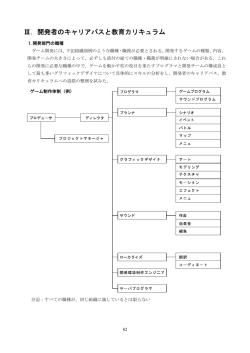
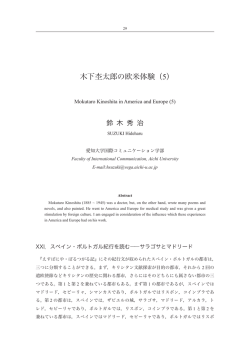
TMの定義
有限オートマトンに無限容量メモリ(読み書き可能なテープ)を拡張した計算モデル
¾有限制御部:有限個の状態を持ち,現在どの状態にいるのか記憶
¾テ プ セルに分割されており 各セルは つの記号を保持
¾テープ:セルに分割されており,各セルは一つの記号を保持
• 最初,有限長の入力記号列wがテープ上に左詰で置かれる(wは空白を含まない!)
¾ヘッド:現在指しているセルの内容の読み取り,書き込み,左右への移動が可能
• TM始動時のヘッドの位置は,入力記号列wの左端
入力列w(空白含まない) 空白記号
テープ
$
終端マーカ
a
a
b
a
a
ヘッド
(これより左には
移動しない)
q
r
有限制御部
□ □
...
テープの右側は
空白のセルが無
限にある
6
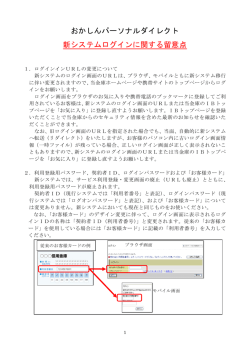
13
定義1.1: TMの形式的定義
7項組 M = (Q, ∑, Γ, δ, q0 , qaccept , qreject) で定義 (※定義は参考書ごとに異なる)
TMへの入力wにはΣ
の元のみ現れる
※Γ-Σ の元(空白記号
など)は現れない
記号
説明
Q
状態の有限集合
∑
入力記号の集合 ※ □ を含まない
Γ
テープ記号の集合 (Σ ∪{$, □, ...})
δ
遷移関数 ( Q ×∑ → Q ×Γ×{L, R}) )
q0
初期状態 (q0 גQ)
qaccept 受理状態 (qaccept גQ)
L, Rはヘッドの
移動方向
※到達すると直ちに停止
拒否状態 (qreject גQ) ※到達すると直ちに停止
qreject
q
a/b, R
δ の各遷移は δ(q,a) = (r,b,R) と表記
r
¾状態q で記号a を読んだら,現セルをb に書き換え,ヘッドを右に1つ移動し,状態r に移る
•遷移はx/y, Dの形式
•DはL(左)またはR
(右)のどちらか
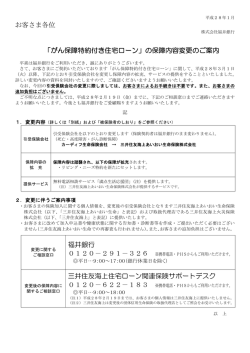
TMの状態遷移図
X/X, R
例1.1:
0, Yを読み
飛ばす
Σ={0,1},
Σ
{0 1}
Γ=Σ ∪
{$,□,X,Y}
q0
Y/Y, R
□/□, R
qaccept
q3
Y/Y, R
q0
qaccept
qreject
初期状態 受理状態 拒否状態
q1
0/X, R
□/□, R
1/1, R
Y/Y, R
q4
14
遷移元と先が同
じなら複数の遷
移をまとめて書い
ても良い
Y/Y, R
0/0 R
0/0,
1/Y, L
Y/Y, L
0/0 L
0/0,
q2
0, Yの間
巻き戻す
□/□, R
qreject
•受理状態,または,拒
否状態に到達すると,
直ちに停止
1/1, L
0/0, L
•遷移の形式には色々バリエーションがあり,参考書ご
とに異なるが,モデルとしては等価(証明は略)
•Dとして,S(ヘッドを移動させない)を持つモデルもある
7
15
TMと有限オートマトンとの違い
TM Mは読み書き可能な無限テープを持つ
¾テープへの読み書き,および,読み書き位置の
変更が可能
qaccept
a/□, R
q1
q0
TM Mは入力の末尾に達しても停止しない
¾空白記号を読みながら動作を継続
¾いつまでも停まらないかも知れない
¾永遠に止まらないTMを記述するのは簡単
□/□, R
□/□, L
無限ループを含むTMの例
TM M は受理状態または拒否状態に到達すると即座に停止
¾テープの内容やヘッドの位置に関係なく,q
容
関
,qaccept またはqqreject に到達すると停止
停
¾入力の読み込み途中で,それより後ろの文字列を読み込んでいなくても,見てないところ
も含めて受理する
TM M が入力wに対して動作開始した時の結果は次の3通り
¾受理状態で停止: Mはwを受理する
¾拒否状態で停止: Mはwを受理しない
¾停止しない(無限ループ): Mはwを受理しない
16
様相(configuration):TMのある時点での様子
様相の書き方
$ 1 1 0
1q310
現在の状態
現在の状態 3
現在の状態:q
x1x2...xi-1 q xixi+1...xn
ヘッドの左側の
記号列($からヘッ
ド手前まで.$は
書かない)
ヘッドの右側の記号列
(ヘッドから最も右の非空白記号まで)
ヘッド上の記号
空白を一つ書く!
特例:
ヘッドの左側に何もないとき,q x1x2...xn
ヘッド上から右側が全て空白のとき,x1...xi-1 q □
様相によるTMの動作の表現
¾様相C1にδ の遷移を適用し様相 C2が得られるとき,“C1はC2を導出する”という
¾C1 ├ C2 と表記
¾C0 ├ C1├ ... ├ Cn のとき(0回以上の導出), C0 ├* Cn と書く
¾TMの動作は,初期様相C0=q0wからqacceptまたはqrejectを含む様相への列として表現可能
¾様相の列がqacceptまたはqrejectに到達せず無限ループすることもある
8
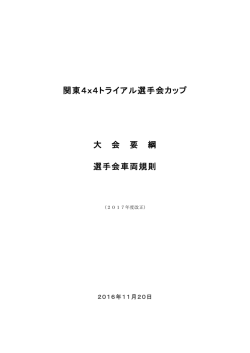
17
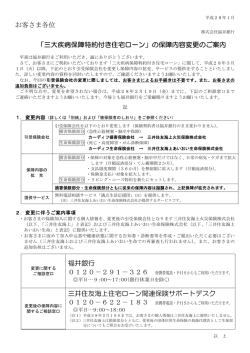
TMの動作例
例1.1のTM Mに文字列“01”を入力したときの動作
X/X, R
Y/Y, R
0/0, R
q0
□/□, R
1/1, R
Y/Y, R
□/□, R
qaccept
Y/Y, R
q3
Y/Y, R
q001
0
q0
1
Xq11
├
X
q1
0/X, R
1/1, L
0/0, L
1
X
q1
q2
Y
q2
1/Y, L
□/□, R
qreject
q4
q2XY
├
Y/Y, L
0/0, L
TM M
Xq0Y
├
X
Y
├
XYq3□ ├ XY□qaccept□
X
q0
X
Y
q3
Y
qaccept
18
練習問題
問1.1: 例1.1のTM Mについて以下の問いに答えよ.
a) 0011を入力するとどうなるか.
b) 011を入力するとどうなるか.
9
19
TMの停止性
TM Mは入力wに対して,以下のいずれかの動作を行う
(1) qacceptに到達して停止
(2) qrejectに到達して停止
(3) 永遠に停まらない(無限ループ)
Mがwを受理するのは(1)の場合のみ
(2)と(3)の場合はwを受理しないが,(3)かどうかを見極めるのは困難
20
Decider と Recognizer
「計算できる」の定義
¾問題に対し,解を答える,または,解がないと答えるアルゴリズムが存在する
¾語wの言語Lへの所属判定問題の場合
• wがLに属する時はwを受理し,そうでない時はwを拒否して停止するTMが存在
TMの能力に応じて以下の呼称を用いる
¾Decider
• ある言語Lが存在し,任意の入力wに対し,w∈Lの時はqacceptに到達し停
止し, w∉ L の時はqrejectに到達し停止するTM
¾Recognizer
• ある言語Lが存在し,任意の入力wに対し,w∈Lの時はqacceptに到達し停
止するTM
• w∉Lの時は停止しないかも知れない
• 問題が計算できる⇔deciderが存在
• deciderが存在しないがrecognizerなら存在する問題もある(両方存在しない問題もある)
10
21
半決定可能/決定可能な言語の定義
定義1.2: ある言語Lのrecognizerが存在するとき,Lは半決定可能
(semi-decidable or Turing-recognizable) 1と言う.
定義1.3: ある言語Lのdecider が存在するとき, Lは決定可能
(decidable)2であると言う.
• Lが決定可能であるとき,Lは半決定可能でもある
¾Lのdecider Mは,任意の文字列w∈Lを受理するため...
参考書によっては,以下のように呼ぶことも...
1帰納的可算(RE: recursively enumerable)
2帰納的(recursive)
22
言語Lが半決定可能/決定可能であることの証明法
与えられた言語Lが半決定可能であることを証明したい
¾Lのrecognizerまたはdeciderを一つ構成する
Lが決定可能であることを証明したい
¾Lのdeciderを一つ構成する
他の証明方法
¾既知の(半)決定可能な言語に帰着する(帰着は 後に学ぶ)
¾既知の(半)決定可能な言語に帰着する(帰着は,後に学ぶ)
11
23
決定可能な言語の例
問1.2:
a) 有限長文字列の有限集合はどれも決定可能か?
b) 正則言語はどれも決定可能か?
24
TMの簡略記述
TMの形式的記述(形式レベル記述と呼ぶ)は煩雑
¾全状態,状態遷移関数を含む7項組M = (Q, ∑, Γ, δ, q0 , qaccept , qreject)全て
を記述する もしくは 相当する状態遷移図を与える必要がある
を記述する,もしくは,相当する状態遷移図を与える必要がある
労力軽減のためTMを簡略記述する(抽象レベル記述と呼ぶ)
¾ヘッドの移動,テープに書き込む記号の種類,手順を自然語で記述(状態,状
態遷移などは与えなくて良い)
言語Lが半決定可能(または決定可能)であることを証明するには,L
言語Lが半決定可能(または決定可能)であることを証明するには
L
のrecognizer(またはdecider)を抽象レベルで構成する
¾注意
• 抽象レベルで記述したTMから,等価な形式レベルのTMが構成できることが必要
• Deciderの場合は,どんな入力に対しても停止することが必要
12
25
TMの抽象レベル記述例
例1.2:
L = {0 2 | n ≥ 0} を受理するTM Mを構成せよ.
n
(抽象レベル記述)
Mは入力wを入力すると以下のように動作する.
基本アイデア
1回のループで0の個数
を半分にする.最後に一
つだけ0が残れば受理.
※アルゴリズムはこれ以
ゴ ズ
外に色々考えられる!
(ステップ1) テープの左端から入力wの右端に向かってヘッドを移動させながら一つおきに0を
テープ記号Xに書き換える(0の個数を半分にする)
(ステップ2) ステップ1で0の数が1つだったら,停止して受理(accept)
(ステップ3) ステップ1 で0の数が(1以外の)奇数だったら,停止して拒否(reject)
(ステップ4) ヘッドをテープの左端に戻す
(ステップ5) ステップ1から繰り返す
(注)TMを構成する際には,テープ記号として,入力アルファベットΣ以外の(有限個の)記
号(X, Y, Zなど)を使用して良いことに留意せよ.
よくある間違い (TMにない機能を使うのは×)
¾変数を使う,算術演算を使う,など
26
練習問題
問1.3: 例1.2のTMを形式レベル(状態遷移図)で記述せよ.
ヒント:1の個数が1の場合,偶数個の場合,奇数個(3つ以上)の場合を異なる状態で区別する.
問1.4: 以下の言語を決定するTMを構成せよ(“抽象レベル”でよい).
a) 同数の0と1を含む列の集合(ただし,Σ={0,1})
b) {wwR | wは0,1の任意の列} (2005年テスト問題)
c) {0n10n | n ≥ 0 } (2006年テスト問題)
13
27
一般の判定問題をTMで扱う方法
扱いたい問題を表す言語を定義Æ言語への所属判定としてTMで扱うことができる.
(1) 入力が文字列であるような問題
素数判定問題:L={全ての素数の集合}
文法チェック問題:L={正しい文法で書かれたJavaプログラムの集合}
(2) 入力が任意のオブジェクトであるような問題Æ オブジェクトを2進列に符号化
9プログラムの停止性判定問題
¾任意のプログラムコードは2進数の列で符号化できる.
¾L={任意の入力で停止するようなプログラムの2進列の集合}とすれば,言語になる.
9グラフがオイラー閉路(全ての辺が一筆書きできる)を持つか
¾行列やグラフを2進文字列として符号化する.
¾L={オイラー閉路を持つグラフの符号の集合}とすれば,言語の認識問題になる.
9論理関数 f(x1, x2, ..., xn)に対し,f(x1, ..., xn)=1となる各変数への割当て方は存在するか?
¾例えば,x1∧¬x2∨¬x1∧x3=1を満たす割り当て方は,x1=1, x2=0, x3=1である.
¾全ての論理関数を2進符号化し,真になる割当て方が存在するものの集合を受理言語
とする.
28
TMで解ける(決定可能な)判定問題の例
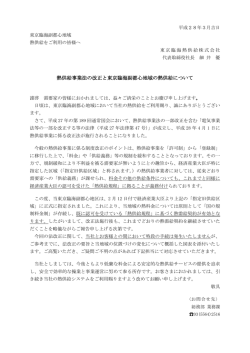
例1.3: 判定問題「与えられた無向グラフGが連結であるかどうか」は決定可能か?
証明
¾ G=(V,E)で与えられ,頂点の集合はV={v
(
)で与えられ 頂点の集合は { 1,v2,...,vn},
} 辺の集合はE={e
辺の集合は { 1,...,em}
¾ 無向グラフGの符号を〈G〉と表記する.
¾ 図のグラフは例えば〈G〉 =(1#2#3#4)((1#2)(1#3)(2#3)(3#4))
のように符号化できる.
2
V
E
1
4
3
¾ 次のTMを構成する.ただし,Σ={(, ), # , 1, 2, 3, 4}, Γ=Σ ∪{1’, 2’, 3’, 4’, $, □}
1. Gの最初の頂点をマークする(頂点“1”を“1’”に書き換える).
最初
点を
クす ( 点“ を“ ”に書き換え )
2. マークされた頂点がこれ以上増えなくなるまで3. を繰り返す
3.
Gの各頂点に対し,マークされた頂点からの辺があるとき,その頂点をマークする
4. 全ての頂点をスキャンし,全てマークされていたらaccept,そうでなければreject
¾ 上記のTMはこの問題のdeciderになっていることは明らか.∴決定可能 □
14
29
練習問題
問1.5: 例1.3の判定問題を表す言語を定義せよ.
30
記号の用法
文字(記号)
¾0, 1, a, b, X, Yなどで表記
¾文字変数は,x, yなどで表記
アルファベット(文字の有限集合)
¾Σ と表記.例) Σ={0,1}, Σ={a, b, c}など
文字列(語)
¾例)0010, aabc, 0k1k, vvR
¾入力文字列は慣用的にw と表記
空列
¾ε と表記.例)任意の文字列wに対して,w0=ε
空集合
¾∅と表記(εとは異なるので間違えないように!)
言語(文字列の集合)
慣例的な用法
a,b,... 文字
q,r,... 状態
x,y,... 文字変数
w ... (入力)文字列
i,j,k,l,m,n ... 整数
A,B,... 集合
M ... 機械
L ... 言語
〈M〉 ... 機械Mの符号
(=プログラムコード)
¾L と表記.例) L={0n1n | n≥0}={ε, 01, 0011, 000111, ...}
オブジェクト(グラフなど)Oを符号化した文字列(符号化法は固定)
¾〈O〉と表記.
15
31
まとめ
チューリング機械(TM)とは
¾形式的な定義
¾状態遷移図
¾様相(configuration)
¾TMの記述法(形式レベル記述と抽象レベル記述)
¾半決定可能な言語と,決定可能な言語
¾TMが扱う問題は判定問題
• 言語への所属判定⇔一般の判定問題
Homework(次回講義時に提出)
¾問1.1~1.5
16
© Copyright 2026 Paperzz