制約つき最適化問題
制約条件は
g i ( x) ≤ 0, (i = 1,K, m) 不等式制約
h j ( x) = 0, ( j = 1,K, l )
等式制約
および,それらの組合せで表現される.
最適性条件を考えよう
非線形最適化3
1
不等式制約のみの問題
min f ( x)
s.t. g i ( x) ≤ 0, (i = 1,K, m)
有効(active)な制約条件
I ( x) = {i g i ( x) = 0} ⊆ {1,K, m}
非線形最適化3
2
幾何学的な条件
* T
f
x
∇
(
) d < 0,
*
x : 局所最適解 ⇒
∇g i ( x* ) T d < 0 i ∈ I ( x * )
なる d ≠ 0は存在しない
(
)
【証明】
そのようなdが存在したとする.
( )
i ∈ I x * ⇒ g i ( x * + αd ) = g i ( x * ) + α∇g i ( x * ) T d + o( α )だから,
十分小さいα > 0 に対し g i ( x * + αd ) < 0
( )
i ∉ I x * ⇒ g i ( x * ) < 0 なので,十分小さいα に対し g i ( x * + αd ) < 0
一方,f ( x* + αd ) = f ( x * ) + α∇f ( x * ) T d + o( α ) なので,
α を十分小さくとると f ( x* + αd ) < f ( x* ) となる.
非線形最適化3
3
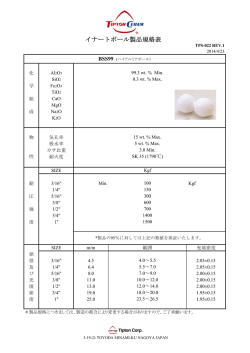
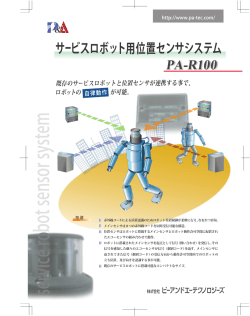
g 2 ( x) = 0
最適解の場合
f の等高線
大
∇f ( x * )
∇g1 ( x* )
小
x*
∇g 2 ( x * )
g1 ( x) = 0
非線形最適化3
4
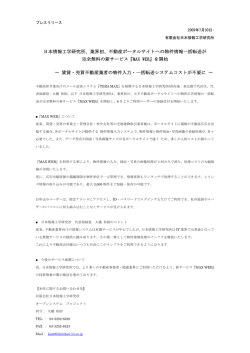
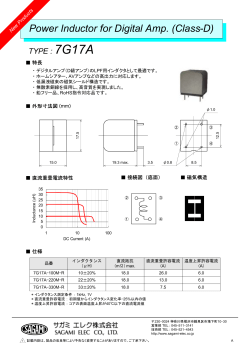
最適でない場合
g 2 ( x) = 0
f の等高線
大
d
∇g1 ( x )
*
小
x*
∇g 2 ( x * )
∇f ( x * )
g1 ( x) = 0
非線形最適化3
5
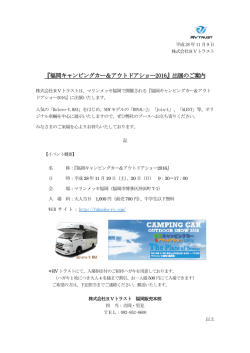
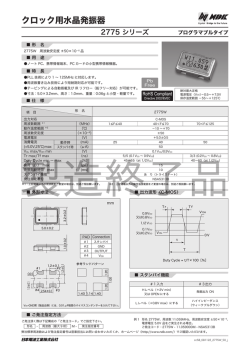
Gordanの定理
a1 ,L, a p ∈ R nとする.(1), (2)のうちいずれか一方が成立
(1) aiT x < 0, (i = 1,K, p )なる x ∈ R nが存在
p
(2)
∑
yi ai = 0, yi ≥ 0, y ≠ 0 なる y ∈ R pが存在
i =1
(2)
(1)
a1
a1
a2
x
a2
a4
非線形最適化3
a3
a4
a3
6
定理(Fritz John)
m
*
*
λ
(
)
λ
(
) = 0,
f
x
g
x
∇
+
∇
0
i
i
*
x : 局所最適解 ⇒
i =1
*
*
g
(
x
)
0
,
λ
g
(
x
) = 0, λi ≥ 0, λ0 , λ1 ,K, λm ≠ 0
≤
i i
i
∑
(
【証明】
(
)
( ))
∇f ( x* ) T d < 0, ∇g i ( x* ) T d < 0 i ∈ I x* となるd は存在しない.
Gordanの定理より
*
λ
∇
g
(
x
∑ i i ) = 0,
i∈I (x )
λ0 ≥ 0, λi ≥ 0 (i ∈ I (x* )), λ0 , λi∈I (x ) ≠ 0
となる λ が存在する.
λ0∇f ( x* ) +
*
(
*
)
( )
i ∉ I x* ⇒ g i ( x* ) < 0 なので,λi = 0 とおけばよい.
非線形最適化3
7
Karush-Kuhn-Tucker(KKT)条件
Fritz Johnの条件において λ0 ≠ 0 ならば,
λi = λi λ0 とおくことにより,以下が得られる
Karush-Kuhn-Tucker条件(一次の必要条件)
m
*
∇f ( x ) +
∑ λ ∇g ( x ) = 0,
i
i
*
i =1
g i ( x * ) ≤ 0, λi g i ( x* ) = 0, λi ≥ 0, (i = 1,K, m )
非線形最適化3
λi : ラグランジュ乗数
8
制約想定
Fritz Johnにおいて λ0 ≠ 0 となるための条件
*
*
(
) が一次独立
∇
g
(
x
),
i
∈
I
x
例) i
g i が全て凸で g i ( x ) < 0 ∀i となる x が存在
など
制約想定が成り立たないとき
→局所解でもKKT条件が成り立たない
f , gi
がすべて凸とする
x * , λ がKKT条件を満たす ⇒ x* : 大域的最適解
非線形最適化3
9
等式・不等式制約の場合
min f ( x)
s.t. g i ( x) ≤ 0, (i = 1,K, m)
h j ( x) = 0, ( j = 1,K, l )
h j ( x) ≤ 0
h j ( x) = 0 ⇔
− h j ( x) ≤ 0
とすれば,不等式制約の場合に帰着できる
しかし,制約想定を満たさない
非線形最適化3
10
Karush-Kuhn-Tucker(KKT)条件
*
∇f ( x ) +
m
l
∑ λ ∇g ( x ) + ∑ π
i
i
*
i =1
j ∇h j ( x
*
) = 0,
j =1
g i ( x * ) ≤ 0, λi g i ( x * ) = 0, λi ≥ 0, (i = 1,K, m )
h j ( x * ) = 0, ( j = 1,K, l )
λi ,π j : ラグランジュ乗数
非線形最適化3
11
LPで考える
c − AT w = p
c
c − AT w − p = 0,
主問題(P)のKKT条件
Ax ≥ b, w ≥ 0, wT ( Ax − b ) = 0
min c x
(P)
s.t. Ax ≥ b, x ≥ 0
T
x ≥ 0, p ≥ 0, x T p = 0
Ax ≥ b, w ≥ 0, wT ( Ax − b ) = 0
(
)
c ≥ AT w, x ≥ 0, x T c − AT w = 0
cf.)相補性定理
非線形最適化3
12
ペナルティ関数・ペナルティ法
制約条件からのはずれを,はずれの程度に
比例したペナルティとして目的関数に加える
制約なし最適化問題とする
非線形最適化3
13
不等式制約 g ( x) ≤ 0 に対し,
l1 ペナルティ: max(0, g ( x))
l2 ペナルティ: (max(0, g ( x)))
2
ペナルティ関数の例
f ( x) + ρ max(0, g ( x))
ρ > 0 : ペナルティパラメータ
非線形最適化3
14
l1 ペナルティ: max (0, g ( x)) の特徴
ρ > 0 : 十分大とすると,ペナ ルティ関数の最適解は
元の制約つき問題の解 と一致(exact penalty)
しかし,ペナルティ関 数は微分不可能
l2 ペナルティ: (max (0, g ( x)))2 の特徴
ペナルティ関数は微分 可能
しかし,ペナルティ関 数の最適解は元の制約 つき問題の
制約条件を満たさない .ρ を大きくすれば限りな く近づく
非線形最適化3
15
ペナルティパラメータを大きくすると,元の問
題の解に近づくが,数値的不安定を生ずる
改良版が,SQP法などの目的関数として利
用されている
考え方は素晴らしく,統計的データ処理,強
化学習,最適制御などで,用いられている
非線形最適化3
16
制約付き問題の(実用的)解法
逐次二次計画法(SQP法)
各反復で,
目的関数を(凸)二次近似
制約条件を一次近似
した問題(凸二次計画)を解く
KKT条件に対し内点法(後述)を応用する方法
近年,その有効性が示された
非線形最適化3
17
演習課題
次の例題について
1
2
2
max (x1 − 1) + (x2 − 1)
2
2
s.t. 4 x1 − (x2 − 3) ≤ 0
{
}
x1 ≥ 0, x2 ≥ 0
KKT条件を満たすすべての点とそこでのラグラン
ジュ乗数を求めよ
2. 最適解はどこか
締切:7月14日12時
1.
非線形最適化3
18
© Copyright 2026 Paperzz