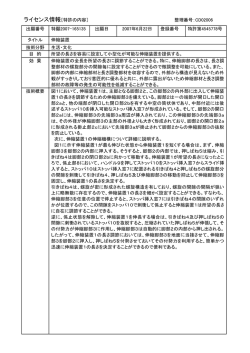
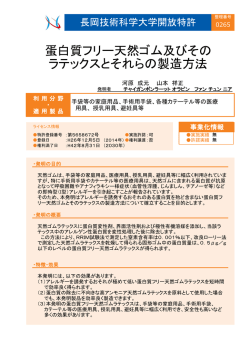
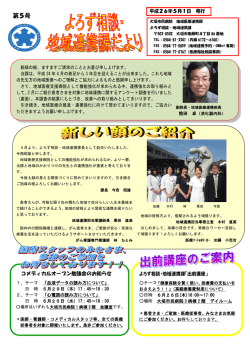
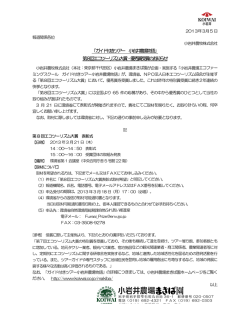
長岡技術科学大学開放特許 整理番号 0169 触覚の解析方法および 触覚の解析装置 発 明 者 大石 利 用 分 野 ・ 適 用 製 品 潔 桂 誠一郎 産業用ロボット、自動車・医療技術、 教育関連機器等、遠隔操作を利用する各種技術分野 事 業 化 情 報 ライセンス情報 ●特許登録番号:第5211580号 ●登 録 日:H25年3月 8日(2013年) ●権 利 満 了 日:H39年8月17日(2027年) ●実 施 許 諾:可 ●権 利 譲 渡:否 ●実施実績 ●許諾実績 無 無 ▪発明の目的 人間の持つ触覚を伝達するにあたり、環境との接触により生じた力の情報から、 該環境の材質又は品質上の特徴を定量的に把握して抽出すると共に、各材質又は 品質毎にデータベース化して解析できるようにすることを目的とします。 ▪発明の概要 環境Eとの接触動作により生じた時系列な反作用力の触覚情報を入力手段により 取得し、この入力手段で取得した触覚情報を、処理手段により時間領域で可視 化できるように解析処理し、この解析処理結果から抽出手段が環境Eの材質また は品質を抽出する。また、解析処理結果と環境Eの材質とを関連付けた関連付け データを、環境Eの材質毎に記憶手段に記憶させます。 ▪特徴・効果 1)取得した触覚情報に時間領域で解析処理を施し、得られた周波数分析データ に基づき環境との接触動作で生じた力から、接触する環境の材質的や品質上 の特徴を定量的に把握して抽出することが可能となります。 2)また、マスターシステムに加わる作用力と、この作用力を受けてスレーブシ ステムで発生する反作用力とを別々に分離し、ある時間にどのような反作用 力が生じているのかを、触覚情報として取得することが可能となります。 これにより、1又は複数のマスターシステムに加わった作用力をネットワークを 介して複数のスレーブシステムに反作用力として発生させることができますの で、遠隔地における力伝送も可能となります。 発 明 の 詳 細 ・ 図 面 等 環境との接触動作に応じて作動するアクチュエータを備え、前記アク チュエータは、1台以上のマスターシステムおよび2台以上のスレーブ 特許請求の範囲 システムをネットワークで接続してなり、前記環境との接触動作におけ る作用力を前記マスターシステムで受けると、この作用力に伴う反作用 力を、前記ネットワークを介して前記スレーブシステムで生成するよう になっており、ある時間にどのような反作用力が生じているのかを、前 記環境との接触動作により生じた時系列な力の触覚情報として取得し、 前記取得した前記触覚情報を時間領域で解析処理して、前記触覚情報に 含まれる時間と力との関係を、周波数と振幅との関係を示す周波数分析 データに変換し、この周波数分析データから前記環境の材質または品質 を抽出することを特徴とする触覚の視覚的解析方法。 [詳 細] 図1 触覚解析装置の概要図 図1中、1は外部から取得した触覚情報 を視覚情報化する装置本体で、例えばコ ンピュータなどの演算処理機能を有する 装置で構成されます。 この装置は、ある時間における力と位置 の触覚情報を取得する入力手段2と、入 力手段2で取得した触覚情報を時間領域 と位置領域(空間領域)解析処理する処 理手段3と、処理手段3で得られた空間 位置毎の周波数分析データを記憶する記 憶手段4と、画面(ディスプレイ)やプ リンタなどの視覚的な表示手段5と、リ ニアモータ12の駆動を制御するモータ制 御手段6とにより構成されています。 そして、その 作 用は図2に示すフロー チャートS1~S5にしたがって処理され ます。 【参考資料】 ▪関連特許情報 ①特許第4876246号 触覚制御方法及び触覚制御装置 ②特許第5057285号 触覚の視覚的表現方法および 触覚の視覚的表現装置 お問い 合せ先 長岡技術科学大学 総務部 産学・地域連携課 知的財産係 図2 触覚の解析装置の処理フローチャート ③特許第5158562号 触覚の解析方法および触覚の 解析装置 ④特許第5205864号 触覚の解析方法および触覚の 解析装置 TEL. 0258-47-9279 FAX. 0258-47-9040 E-mail [email protected]
© Copyright 2026 Paperzz