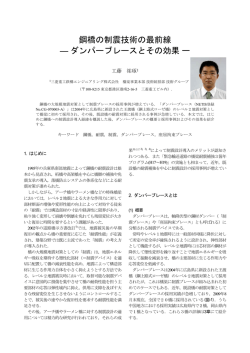
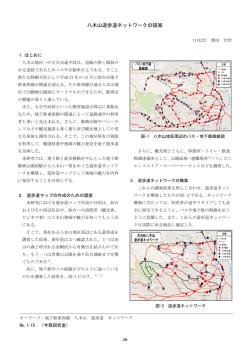
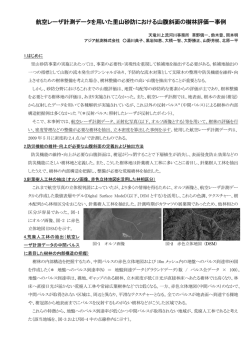
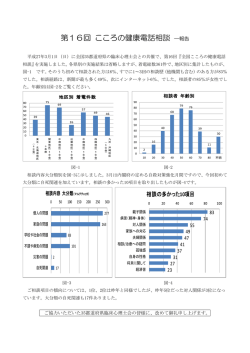
ヒヤリハット事象を用いた交通安全対策事業の整備効果分析 Analysis of Maintenance Effect for Traffic Safety Project with Near-Collision Event 交通事業本部 交通第 1 部 石川 由憲 1) 交通第 1 部 連川 三十史 2) 交通第 1 部 佐々木 良 3) 1) 2) 3) 概要(Abstract) 財政状況が厳しさを増すなか、公共投資に対する国民の視線は厳しく、効率的・効果的で透明性の高い事業 の執行が強く求められている。事業の透明性を高めるためには、整備に至った課題(必要性)を客観的に明示す るとともに、事業実施による整備効果を客観的に把握し、可能な限り速やかに公表することが重要となる。 交通安全対策事業の整備効果は、死傷事故率等実際の交通事故データにより客観的に把握されるが、事故 データは年次によるばらつきが懸念されるため、整備前後それぞれ 4~5 年程度の平均で評価することが望まし く、整備直後の速報値として整備効果を公表するためのデータとしては適さない。 本報告は、ビデオカメラを用いた交通挙動調査により、ヒヤリハット事象等を把握し、交通安全対策事業の整備 効果をいち早く公表するための基礎資料の作成を行うものである。 1.はじめに 整備効果分析の対象事業は、「一般国道5号長万 部町豊野付加車線設置」とする。(図-1) 本区間を含む一般国道5号は、函館市と札幌市を 結ぶ主要幹線道路であり、物流の大動脈となってい るため、速度の低い大型車の混入率が高い路線で ある。また、交通量が多く、はみ出し禁止区間が設 置(図-2)されていることもあり、低速車を追越す機 会が少ないため、車間距離の短い危険な走行や無 理な追越しが多く発生している。 本事業は、安全に追越しする機会を与え、無理な 追越しによる死傷事故を削減するため、大型車等の 低速車を追越すための「ゆずり車線」と対向車線へ のはみ出しを物理的に除去するための「中央分離 帯」の設置を行う事業である。(図-3) 図-2 はみ出し禁止区間の位置 図-1 調査対象区間位置図 図-3 整備前後の横断構成 1 2.交通事故の発生状況 分析対象事業の整備計画区間では、平成 17 年~平成 20 年の 4 年間に 4 件の交通事故が発 生、うち 2 件が正面衝突による死亡事故であり、死 者は 4 名となっている。(図-4) また、分析対象事業区間の死者率は、7.86 人/ 億台キロ・年(H17~H20 平均)であり、全道のセン サス区間でワースト 15 位となっている。(図-5) ◆調査日時 平成 22 年 11 月 5 日(金) 7:00~17:00 ◆調査内容 ・時間帯別上下別の交通量、追越し車両数 ・時間帯別上下別のヒヤリハット事象(車種別) ・平均車頭間隔 ◆調査方法 路側にビデオカメラを設置し、昼間 10 時間 (7:00~17:00)の交通流を撮影する。撮影した映 像を基に、ヒヤリハット事象をカウントするとともに、 平均車頭間隔を計測した。 ○ヒヤリハット事象 追越し車両や対向車のブレーキランプの点 灯、危険回避のハンドル操作、追越し途中での 取りやめ行動をカウントする。 ○平均車間距離 単独車両、車群の先頭車両は除外した。全 車から 5 秒以上離れた場合、車群の切れ間で あると判断した。(「交通工学ハンドブック 交通 工学研究会」の定義) 出典:交通事故マッチングデータ(H17-20) 北海道開発局 図-4 死傷事故発生位置図(H17~H20) 14.00 12.00 10.00 15 位 7.86 人/億台キロ (豊野付加車線設置区間) 8.00 6.00 4.00 全道平均 1.11 人/億台キロ 2.00 0.00 センサス区間(国道 842 区間) 出典:交通事故マッチングデータ(H17-20) 北海道開発局 図-5 全道センサス区間の区間別死者率(H17~H20) 3.交通挙動調査の実施概要 整備計画区間近傍において、特に追越し事象 が多く発生している区間にビデオカメラを設置し、 画像の読み取りを行うことでヒヤリハット事象、平 均車間距離の計測を行った。 追越し可能区間の全ての挙動を把握するため、 カメラは計 8 台設置した。(図-6) 図-7 調査状況図及びビデオカメラ設置状況写真 ◆ヒヤリハット事象の判断基準 調査員による判断のバラツキを防止するため、 客観的な判断基準を設定して計測を行った。 図-6 ビデオカメラ設置位置 2 4.交通流の現状把握 通過交通全体の中で、追従走行となっている 車両は全体の半数であり、低速車の混入により快 適な走行が阻害されている状況にある。(図-9) ①追越し車両のブレーキ点灯 ブレーキラン プの点灯 走行車両の半数以上が追従走行 ②追越し時対向車のブレーキランプ点灯 1338 31% 単独走行 車群先頭 2195 51% ブレーキラン プの点灯 車群追従 753 18% ③危険回避のためのハンドル操作 通過交通量 4,286台 図-9 単独走行と追従走行の割合 追従走行車両の内、約 4 割の車両に追越しの 実行や追越ししようとする挙動などの「追越し事 象」が確認された。また、追越し事象の内、約 20% でヒヤリハット事象が発生しており、大部分が他車 の無理な追越しに起因する事象であることが確認 された。(図-10) 外側線を跨い で走行した場 合カウント 外側線を跨い で走行した場 合カウント ヒヤリハット事象 追越 (ヒヤリハットなし) 80% 5% 15% 628 ④追越し行動途中での取りやめ行動 39 117 自らの追越に起因するヒ ヤリハット 対向車の追越に起因す るヒヤリハット 追越し事象 追越事象 784台 自らの無理な追越に起因するヒヤリハット 39件 中央線を跨いで走行 した場合にカウント ブレーキランプ 点灯(追越時) 3 2% ◆車頭間隔、走行速度計測方法 車間距離は、車群の先頭車両の 2 点間の通過 時間から速度を算出後、先行車両と追従車両の 通過時間差より算出した。 追越取りやめ 行動 36 23% 危険回避行動 114 73% ブレーキランプ点灯(追越 時) 追越取りやめ行動 ブレーキランプ点灯(対向 車両追越時) 危険回避行動 ブレーキランプ 点灯(対向車両 追越時) 3 2% ヒヤリハット事象 156台 他車の無理な追越に起因するヒヤリハット 117件 図-10 追越し事象に対するヒヤリハットの割合 基 準 点 距 離 : L =40.0( m ) ま た は L=53.5(m) 通過時間:t(sec) 速度:V(km/h)=3.6×L/t 先行車両と追従車両の間隔:s(sec) 車間距離:D(m)=V×s/3.6 追従状態にある車両の 9 割が安全車間距離※ を確保できておらず、平均車間距離は約 41mとな っており、追従車両の多くがイライラ状態で走行し ているものと想定される。(図-11) 図-8 車間距離、走行速度計測概要図 3 車群数 753車群 (車群先頭車両数) 車群数 (車群) 大型車 90 579 小型車 157 1369 上下線計 247 付加車線設置により車間距離が広がり 追越やヒヤリハット事象が減少 安全距離確保車両 安全距離未満車両 1948 車間分布 0% 20% 40% 60% 80% 100% 図-14 車間距離に対する車群の分布 追従状態にある車両と自由走行車両の累積速 度分布をみると、追従状態にある車両のほうが低 い速度で走行する車両が多く、平均で約 4%低い 状況となっている。(図-15) 付加車線の設置により、低速車の影響を除外 することで、単独走行車両の割合が増加すること で、旅行速度の向上が期待される。 図-11 車間距離確保状況 割合 (%) 100% 単独 90% 追従 80% 約4%速度低下 70% ※実走行速度における制動停止距離から判定。 ※制動停止距離は、空走時間を 1 秒とし、乾燥した舗装 路面を走行している場合の目安であり、60km/h 走行の 場合 44m 必要。(出典:交通の教則 警察庁交通局) ※道路交通法では、直前の車両が急停止した場合でも追 突せずに回避できる距離を保たなければならないと規 定されている。 図-12 安全な車間距離の目安 60% 50% 40% 30% 20% 0% 0 各車間距離別の台数(台) 250 4% 19% 45 200 150 100 14 6% 20 7 265 84% 5% 178 75% 50 0 対向車の無理な追越 に起因するヒヤリ ハット 自らの無理な追越に 起因するヒヤリハット 13% 125 82% 21% 9 1 2% 32 1 4% 3 11% 23 77% 85% 37% 3 0 5 30 40 50 60 70 80 90 100 図-15 単独走行と追従走行の累積速度分布 ・車間距離が短いほどイライラ走行増加 ・イライラ走行増加により追越し事象増加 ・追越し事象増加によりヒヤリハット増加 39 14 20 6.おわりに ヒヤリハット事象を観測することで、交通安全対 策事業の整備効果を速やかに取りまとめ公表す ることができるとともに、対策の有効性を早期に確 認することで、必要に応じた追加対策の立案をス ピーディーに行うことが可能となる。 また、客観的な定義づけを行い観測することで、 事後調査実施時に調査員が変わっても精度の高 い整備効果分析が可能となる。 今後も、道路利用者へのアカウンタビリティの向 上、マネジメントサイクルの一層の充実を図るため、 交通安全対策事業の整備効果分析にヒヤリハット 事象を活用することは有効な手段と考える。 -参考文献- 1) 交通事故対策・評価マニュアル交通事故対 策事例集 財)交通事故総合分析センター 2) 交通の教則 警察庁交通局 3) 避譲車線の設置効果に関する分析 第 28 回交通工学研究発表論文報告集 社)交通 工学研究会 追越台数 (台) 350 12% 10 速度 (km/h) 5.整備効果の分析(事前評価) 車間距離が短いほど追越し台数が多くなり、そ れに伴い、ヒヤリハット件数が多くなっている。 このように、低速車の影響でイライラ走行が増 加することで、無理な追越しが増加し、潜在的な 危険性が高まっている。よって、付加車線により低 速車を安全に追越す機会が確保されることでイラ イラ運転が減少し、それに伴いヒヤリハット事象が 減少するものと想定される。(図-13、14) 300 《調和平均値》 単独走行 66.79km/h 追従走行 63.87km/h 10% 追越件数 63% 車間分布 車間距離の分布 図-13 車間距離に対する追越し台数とヒヤリハット事象 4
© Copyright 2026 Paperzz