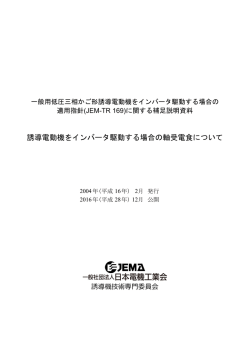
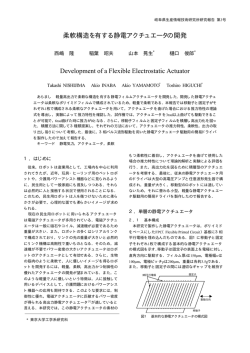
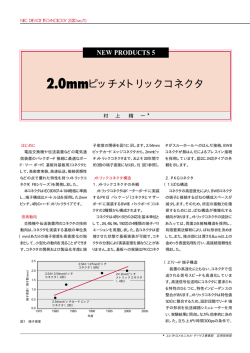
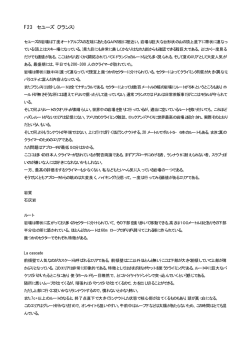
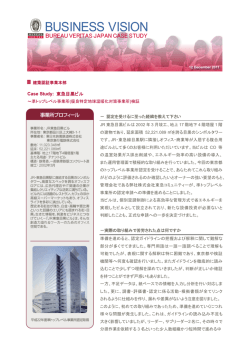
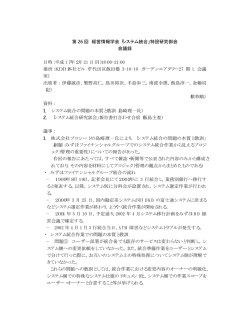
NEW リニアサーボモータ SGLFW2モデル(コア付きFモデル) サーボパック形式 SGD7S/SGD7W 推力密度 1 世界No. 最大推力 40 50 20 コギング 推力 モータ 体積 * : 自社調べによる %向上 %低減 MAX %低減 品質及び環境マネジメント システムの国際規格 ISO9001, ISO14001 を 取得しています。 JQA-0422 JQA-EM0202 タクトタイムを短縮せよ! その使命を果たすSGLFW2,誕生 Mission 高速・高精度なモーションを得意とするリニアサーボドライブ。安川電機は,2000 年に Linear シリーズを発売以来,さらなる高速化へのチャレンジを続けてきました。コア, 磁石の最適形状,巻線占積率などの研究を重ね,満を持して SGLFW2 登場。 「タクトタイムを短縮せよ!」という製造装置に課せられたミッションにお応えします。 Feature 1 小形&高性能 ・モータ体積:最大 20% 低減 *1 ・最大推力:40% 向上 *1 ・コギング推力:50% 低減 *1 これらすべてを同時に実現した, 待望のリニアサーボモータです。 Feature 2 Feature 3 省エネ&安全性向上 ・損失を最大 35% 低減 ・サーモスタットによる温度保護機能 *2 付き 幅広いラインアップ 省エネと安全性を兼ね備えた, 優れたリニアサーボモータです。 ・最大推力 135N ∼ 7560N までをカバーする 10 機種を準備 ・多連結対応 *3 によって,10000N 以上も対応可能 ・水冷オプション *3 にも対応可能 *12:従来機種比 *3:安川製品のシリアルコンバータ * :別途ご相談ください。 お客様のご要望に最適な機種を とりそろえています。 リニアサーボモータラインアップ SGLFW230A070A 30A120A 30A230A 45A200A 45A380A 90A200A 90A380A 90A560A 1DA380A 1DA560A 連続推力 モータ形式 SGLFW2- 30A070A 30A120A 30A230A 45A200A 45A380A 90A200A 90A380A 90A560A 1DA380A 1DA560A 7560N 1000 2000 3000 4000 推力(N) 5000 6000 7000 サーボパック形式 SGD7S-□□□□ SGD7W-□□□□ 1R6A 1R6A 2R8A 2R8A,3R8A 5R5A 180A,120A 120A 200A 330A 200A 330A 8000 高速・高精度位置決め用途に最適です。 マルチヘッド 液晶・有機 EL 製造装置 (ディスペンサ,検査装置,リペア装置など) 2 最大推力 最大推力 0 用途例 サーボパックとの組合せ ステージ駆動(XYθ ) 液晶・有機 EL 製造装置(G5.5 以上・長ストローク用), 半導体製造装置(プローバなど) ガントリ 電子部品製造装置(高速マウンタなど) 仕様一覧 リニアサーボモータ形式 SGLFW2- 30A 45A 070A 120A 230A 200A 380A 定格速度 * 1 , * 2 m/s 4.0 4.0 4.0 4.0 4.0 最高速度 * 5.0 m/s 5.0 5.0 定格推力 * 1 , * 3 N 45 90 最大推力 * 1 N 135 270 定格電流 * 1 Arms 1.4 1.5 2.9 2.8 4.4 最大電流 * 1 Arms 5.3 5.2 10.5 9.3 16.4 1 4.5 4.5 180 170 280 560 540 500 840 1680 1500 8.7 32.7 27.5 kg 0.50 0.90 1.7 2.9 5.5 N/Arms 33.3 64.5 64.5 67.5 67.5 Vrms/(m/s)/ 相 11.1 21.5 21.5 22.5 22.5 N/√W 11.3 17.3 24.4 36.9 52.2 電気的時定数 ms 7.6 7.3 7.3 19 19 機械的時定数 ms 3.9 3.0 2.9 2.1 2.0 200 630 1260 2120 4240 254×254×25 400×500×10 400×500×10 可動子質量 推力定数 誘起電圧定数 モータ定数 磁気吸引力 ヒートシンクサイズ N mm 組合せ固定子 形式 SGLFM 2- 150×100×10 254×254×25 30 A 組合せシリアル変換ユニット 形式 JZDP- 組合せサーボパック 30 628 629 SGD 7 S - 1R6A 1R6A SGD 7 W - 1R6A 1R6A リニアサーボモータ形式 SGLFW2- 30 A 45 A 2R8A 5R5A 2R8A 5R5A 560A 380A m/s 4.0 4.0 4.0 2.0 2.0 m/s 4.0 4.0 4.0 2.5 2.5 定格推力 * 1 , * 3 N 560 1120 1680 1680 2520 最大推力 * 1 N 1680 3360 5040 5040 7560 定格電流 * 1 Arms 7.2 14.4 21.6 14.4 21.6 最大電流 * 1 Arms 26.9 53.9 80.8 53.9 80.8 可動子質量 kg 5.3 10.1 14.9 14.6 21.5 誘起電圧定数 N/Arms 82.0 82.0 82.0 123 123 Vrms/(m/s)/相 27.3 27.3 27.3 41.0 41.0 N/√W 58.1 82.2 101 105 129 電気的時定数 ms 24 23 24 25 25 機械的時定数 ms 1.6 1.5 1.5 1.3 1.3 N 4240 8480 12700 12700 19100 モータ定数 磁気吸引力 ヒートシンクサイズ mm 組合せ固定子 形式 SGLFM 2組合せシリアル変換ユニット 形式 JZDP- 組合せサーボパック SGD 7 S - 632 180A 共通仕様 400×500×10 609×762×10 900×762×10 900×762×10 1200×762×10 90 A 90 120A 560A 最高速度 * 1 推力定数 A 1DA 380A 定格速度 * * 1, 2 45 631 630 3R8A 90A 200A A A 90 A 1D A 1D A 633 634 648 649 650 120A 200A 330A 200A 330A SGD 7 W - 電機子巻線温度が100° 各値は代表値です。 C のときの値です。その他の項目は20° C のときの値です。また, *12.. サーボパックと組み合わせて運転し, *3. 速度制御時の基準速度 * 定格推力は表中寸法のアルミ製ヒートシンクに取り付けた場合の使用周囲温度40°C での連続許容推力値を示します。 ・時 間 定 格:連続 ・絶 縁 耐 圧:AC1500V 1分間 ・絶 縁 抵 抗:DC500V, 10MΩ以上 ・冷 却 方 式:自冷及び水冷 ・周 囲 温 度:0˚C∼40˚C ・周 囲 湿 度:20%∼80% RH (結露しないこと) ・励 磁 方 式:永久磁石形 ・耐熱クラス:B 形式の見方 可動子 SGLFW2̶30A070AT 冷却方式 なし : 自冷 L : 水冷* センサ仕様 T : 磁極センサなし, サーマルプロテクタ付き S : 磁極センサ付き, サーマルプロテクタ付き 設計順位 A 可動子長さ Linear シリーズリニアサーボモータ モータタイプ F : コア付きFモデル 種別記号 W : 可動子 マグネット高さ 電圧 A : AC200V 固定子 Linear シリーズリニアサーボモータ モータタイプ F : コア付きFモデル 種別記号 M : 固定子 SGL F M2̶30270A 設計順位 A 固定子長さ マグネット高さ * : 別途ご相談ください。 3 A : 連続使用領域 B : 反復使用領域 推力 − 速度特性 6 5 5 5 4 4 4 3 3 (m/s) 3 (m/s) 2 0 50 (m/s) 2 B A 1 0 速度 6 速度 速度 6 1 100 推力(N) 0 150 0 100 200 5 推力(N) 3 (m/s) 5 5 4 4 3 (m/s) 1 1 0 200 400 推力(N) 0 600 0 200 400 600 推力(N) 0 800 1000 5 5 4 4 4 速度 速度 速度 500 1000 1500 推力(N) 0 2000 4 0 500 3 2 .5 2 .5 2 2 速度 速度 速度 1 2000 4000 推力(N) SGLFW2-90A560A 6000 0 1000 0 2000 推力(N) 3000 4000 1 .5 (m/s) 1 B A 0 .5 0 2000 SGLFW2-90A380A 3 1 B A 0 2000 (m/s) 2 0 1000 1500 推力(N) 1 .5 (m/s) 1500 B A SGLFW2-90A200A 5 1000 推力(N) 1 SGLFW2-45A380A(SGD7S-180A との組合せ) 3 500 3 2 B A 1 0 0 (m/s) 2 B A 1 0 3 (m/s) 2 B A SGLFW2-45A380A(SGD7S-120A との組合せ) SGLFW2-45A200A 5 3 600 1 SGLFW2-30A230A(SGD7S-3R8A との組合せ) (m/s) 400 推力(N) 3 2 B A B A 200 (m/s) 2 2 0 SGLFW2-30A230A(SGD7□-2R8Aとの組合せ) 速度 速度 速度 4 0 300 SGLFW2-30A120A 6 B A 1 SGLFW2-30A070A 0 2 B A B A 0 .5 0 2000 4000 推力(N) SGLFW2-1DA380A 6000 0 0 2000 4000 推力(N) 6000 8000 SGLFW2-1DA560A (注)1. サーボパックと組み合わせて運転し,電機子巻線温度が 100˚C のときの値です。また,各値は代表値です。 2. 電源電圧により反復使用領域の特性は変動します。 3. 実効推力が定格推力以内であれば,反復使用領域内で使用可能です。 4. 20 m を超えるサーボモータ主回路ケーブルを使用する場合には,電圧降下が大きくなり,反復使用領域が狭くなるのでご注意ください。 4 外形寸法 mm SGLFW2-30A070AS 磁極センサ なしの場合 (12) (9) 31 (55) 14 15 12.5±0.1 (6) (ϕ 7) 3 0.2 ) 29±0.1 50 以上 3×M4×8 0 ±3 00 ϕ7 (10.2) 5.8 20 20 12.2 27 ( (1.5) (27.5) (27.5) 40±0.1 (27.5) 1.5 外形図の可動子は磁極センサ付きを記載しています。 磁極センサなしの場合は,下図のケーブルになります。 70 50 以上 磁極センサ 54 可動子 SGLFW2-30モデル 50 以上 30 0± GAP 0.8 10 0± 30 U, V, W 相の順に電流を流した場合 , 10 可動子は矢印方向に動きます。 3 磁極センサ・サーモスタット側 コネクタ 0 ±3 00 サーモスタット側コネクタ モータ側コネクタ 固定子 モータ側コネクタ SGLFW2-30A120AS 29±0.1 (10.2) 125 27 26.7 (33.2) 15 (7) 31 52.5 12.6 50 7.5 (0.5) 12 15 (55) (27.5) (27.5) (6) 50 以上 磁極センサ 40±0.1 (27.5) 1.5 12.5±0.1 可動子 3 0.2 4×M4×8 (ϕ 7) 0 ±3 00 50 以上 GAP 0.8 U, V, W 相の順に電流を流した場合 , 可動子は矢印方向に動きます。 3 磁極センサ・サーモスタット側 コネクタ 0 ±3 00 モータ側コネクタ SGLFW2-30A230AS 29±0.1 (10.2) 230 26.7 27 52.5 52.5 52.5 (33.2) 12.6 50 15 (7) 31 7.5 (0.5) 12 15 (55) (27.5) (27.5) (6) 50 以上 磁極センサ 40±0.1 (27.5) 1.5 12.5±0.1 可動子 固定子 30 0± 30 0.2 8×M4×8 (ϕ 7) 50 以上 GAP 0.8 U, V, W 相の順に電流を流した場合 , 可動子は矢印方向に動きます。 30 0± 30 磁極センサ・サーモスタット側 コネクタ モータ側コネクタ SGLFM2-30 A 2×N× ϕ 4.8穴 ϕ 8.5 0.4 0.2 6 10.2±0.1 27.5 (27.5) 45 N S N S N S 5 55 (5 ) 固定子 固定子 4.2 45 (45) 22.5±0.1 L2 基準側指示印 (約 4mmの凹加工 2 個所) ねじ頭高さは 4.2mm以下 のこと 取付部詳細 (基準側指示印) (22.5) L1±0.1 項 1 2 3 固定子形式 SGLFM2-30270A SGLFM2-30450A SGLFM2-30630A L1 270 450 630 L2 N 225(45×5) 6 405(45×9) 10 585(45×13) 14 概算質量 [ kg ] 0.9 1.5 2.0 (注) 1. 固定子は,項 1,2,3 の中で,ご使用に応じて連結する ことが可能です。 その場合,上図のように基準側指示印を同一方向に そろえてご使用ください。 2. ペースメーカなどの電子医療機器を装着している方は, リニアサーボモータの固定子に近づかないでください。 5 外形寸法 mm SGLFW2-45モデル 外形図の可動子は磁極センサ付きを記載しています。 磁極センサなしの場合は,下図のケーブルになります。 SGLFW2-45A200AS 可動子 50 以上 50±0.1 48.5 (55) 23 69.5 14.5 (6) 38±0.1 (11.2) 15±0.1 (0.5) 11 46 89.5 磁極センサ 4×M6×11.5 30 0± 30 50 以上 ) 9.1 GAP 0.8 サーモスタット側コネクタ U,V,W 相の順に電流を流した場合, 可動子は矢印方向に動きます。 モータ側コネクタ 0 3 0± 30 磁極センサ・サーモスタット側 コネクタ モータ側コネクタ 固定子 SGLFW2-45A380AS 可動子 50 以上 50±0.1 (9) 2 32 12 384 48.5 89.5 89.5 89.5 (55) 磁極センサ (0.5) (6) (11.2) 14.5 15±0.1 11 23 22.5 46 69.5 (37.5) (37.5) (36) (75) 10 0± 10 30 0± 30 (ϕ 0.2 50 以上 ) 9.1 22.5 (9) 32 12 (ϕ (75) 2 (37.5) (37.5) (36) 磁極センサ なしの場合 205 38±0.1 8×M6×11.5 0 3 0± 30 50 以上 ( 0.3 ϕ9 GAP 0.8 .1) U,V,W 相の順に電流を流した場合, 可動子は矢印方向に動きます。 0 30 3 0± 磁極センサ・サーモスタット側 コネクタ 固定子 モータ側コネクタ SGLFM2-45 A 2×N× ϕ 5. 8穴 ϕ 10 0.5 63 N S N 6 5.2 11.2±0.1 102 N S (102) 51±0.1 L2 ねじ頭高さは5. 2mm以下 のこと 取付部詳細 (51) (基準側指示印) L1±0.1 基準側指示印 (約4mmの凹加工2個所) 6 S 6 0.2 37.5 (37.5) 75 (6) 固定子 項 1 2 3 固定子形式 SGLFM2-45306A SGLFM2-45510A SGLFM2-45714A L1 L2 306 204(102×2) 510 408(102×4) 714 612(102×6) N 3 5 7 概算質量 [ kg ] 1.5 2.5 3.4 (注) 1. 固定子は,項 1,2,3 の中で,ご使用に応じて連結する ことが可能です。 その場合,上図のように基準側指示印を同一方向に そろえてご使用ください。 2. ペースメーカなどの電子医療機器を装着している方は, リニアサーボモータの固定子に近づかないでください。 外形寸法 mm SGLFW2-90モデル 外形図の可動子は磁極センサ付きを記載しています。 磁極センサなしの場合は,下図のケーブルになります。 SGLFW2-90A200AS 磁極センサ 15 30 45 14.5 15±0.1 6×M6×11.5 60 以上 3 0± 30 0 U,V,W 相の順に電流を流した場合, 可動子は矢印方向に動きます。 ϕ 10 ( 3 0± 30 GAP 0.8 60以上 .5) (0.5) 磁極センサ なしの場合 (55) 30 (9 ) (60) 205 89.5 48.5 12 30 0± 30 38±0.1 (11.2) 50 以上 32 ϕ 10 (6) 0.2 ( (60) 120 50±0.1 (36) 2 91 114.5 可動子 10 0± 10 サーモスタット側コネクタ .5) 磁極センサ・サーモスタット側 コネクタ 0 モータ側コネクタ モータ側コネクタ 固定子 SGLFW2-90A380AS 384 89.5 89.5 14.5 15±0.1 3 0± 30 38±0.1 (55) 12×M6×11.5 60 以上 U,V,W 相の順に電流を流した場合, 可動子は矢印方向に動きます。 ϕ 10 ( 30 0± 30 GAP 0.8 .5) 磁極センサ・サーモスタット側 コネクタ モータ側コネクタ 固定子 SGLFW2-90A560AS 38±0.1 50 以上 32 0.3 磁極センサ 3 0± 30 14.5 15±0.1 (6) (11.2) (0.5) 45 (60) (60) (36) 2 91 114.5 (9) 50±0.1 0 .5) 磁極センサ・サーモスタット側 コネクタ 60 以上 ϕ 10 GAP 0.8 89.5 563 89.5 89.5 89.5 89.5 (55) 18×M6×11.5 ( 30 0± 30 48.5 12 15 30 30 可動子 120 89.5 15 30 45 48.5 12 0 (0.5) ( 6) (11.2) 50 以上 32 磁極センサ 0.3 30 (9) (60) (60) 120 50±0.1 (36) 2 91 114.5 可動子 U,V,W 相の順に電流を流した場合, 可動子は矢印方向に動きます。 モータ側コネクタ 固定子 SGLFM2-90 A 2×N× ϕ 7穴 ϕ 11.5 2 (60) 120 107 (60) (6.5) 固定子 6 11.2±0.1 N S N S 6.5 0.3 N S 5.2 102 (102) 51±0.1 L2 項 ねじ頭高さは 6.7mm以下のこと (基準側指示印) L1±0.1 基準側指示印 (約 4mmの凹加工 2 個所) 取付部詳細 (51) 1 2 3 固定子形式 SGLFM2-90306A SGLFM2-90510A SGLFM2-90714A L1 L2 306 204(102×2) 510 408(102×4) 714 612(102×6) N 3 5 7 概算質量 [ kg ] 2.6 4.2 5.9 (注) 1. 固定子は,項 1,2,3 の中で,ご使用に応じて連結する ことが可能です。 その場合,上図のように基準側指示印を同一方向に そろえてご使用ください。 2. ペースメーカなどの電子医療機器を装着している方は, リニアサーボモータの固定子に近づかないでください。 7 (コア付きFモデル) リニアサーボモータ SGLFW2モデル SGLFW2-1D モデル 外形寸法 mm 外形図の可動子は磁極センサ付きを記載しています。 磁極センサなしの場合は,下図のケーブルになります。 SGLFW2-1DA380AS 磁極センサ 89.5 89.5 磁極センサ なしの場合 (55) 67.5 30 0± 磁極センサ・サーモスタット側 コネクタ ±10 100 .5) .5) ϕ 10 可動子は矢印方向に動きます。 ( 30 0± 30 U, V, W 相の順に電流を流した場合 , ϕ 10 30 60 以上 12×M8×16 60 以上 ( (11.2) 38±0.1 GAP 0.8 0 3 0± 30 15 20±0.1 (5) (6) 384 89.5 45 (9) 0.3 136 160 (87.5) (87.5) 175 50±0.1 (36)2 50 以上 32 48.5 12 22.5 45 可動子 サーモスタット側コネクタ モータ側コネクタ 固定子 モータ側コネクタ SGLFW2-1DA560AS 0.3 磁極センサ 50 以上 32 60 以上 0 ±3 00 GAP 0.8 ) 5 10. 15 20±0.1 (ϕ (5) 563 89.5 89.5 89.5 89.5 (55) 22.5 45 67.5 30 0± 30 (6) (11.2) 38±0.1 89.5 45 48.5 12 136 160 (87.5) (87.5) 175 50±0.1 (36) 2 (9) 可動子 18×M8×16 U, V, W 相の順に電流を流した場合 , 3 可動子は矢印方向に動きます。 磁極センサ・サーモスタット側 コネクタ モータ側コネクタ SGLFM2-1D A 2×N× ϕ 10 穴 ϕ 15 3 0.3 6 11.2±0.1 5.2 N S 9. 5 (87.5) 175 156 (87.5) (9 . 5 ) 固定子 固定子 N S N S (102) 102 51±0.1 L2 (基準側指示印) L1±0.1 基準側指示印 (約 4mmの凹加工 2 個所) 項 ねじ頭高さは 8.2mm以下 のこと (51) 1 2 3 固定子形式 SGLFM2-1D306A SGLFM2-1D510A SGLFM2-1D714A L1 L2 N 306 510 714 204(102×2) 408(102×4) 612(102×6) 3 5 7 概算質量 [ kg ] 3.7 6.2 8.6 (注) 1. 固定子は,項 1,2,3 の中で,ご使用に応じて連結する ことが可能です。 その場合,上図のように基準側指示印を同一方向に そろえてご使用ください。 2. ペースメーカなどの電子医療機器を装着している方は, リニアサーボモータの固定子に近づかないでください。 取付部詳細 東京支社 名古屋支店 大阪支店 九州支店 TEL(03)5402-4503 FAX(03)5402-4508 東京都港区海岸 1 丁目 16 番 1 号 ニューピア竹芝サウスタワー 8 階 〒105-6891 TEL(052)581-2251 FAX(052)581-2274 名古屋市中村区名駅 3 丁目 25 番 9 号 堀内ビル 9 階 〒450-0002 TEL(06)6346-4512 FAX(06)6346-4556 大阪市北区堂島 2 丁目 4 番 27 号 新藤田ビル 4 階 〒530-0003 TEL(092)714-5906 FAX(092)761-5136 福岡市中央区天神 1 丁目 6 番 8 号 天神ツインビル 14 階 〒810-0001 ◆各地区の営業所は URL : http://www.yaskawa.co.jp/ http: //www.e-mechatronics.com/ の「お問い合わせ」でご確認ください。 製品改良のため,定格,仕様,寸法などの一部を予告なしに変更することがあります。 この資料の内容についてのお問い合わせは,当社代理店もしくは,上記のお問い合わせ窓口にお尋ねください。 資料番号 CHJP C230841 00C C Published in Japan 2015年 2月 13-11 2 -0 無断転載・複製を禁止
© Copyright 2026 Paperzz