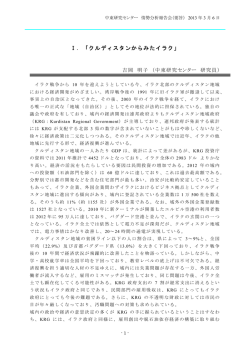
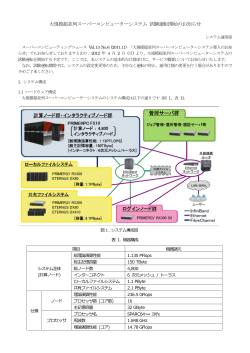
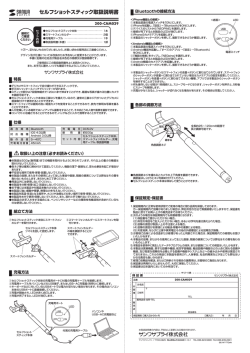
力覚通信システム開発用ツールキット 連(R (Ren en) 3次元力覚入出力デバイス2台と、力覚通信制御開発用ライブラリのセット製品です。 TCP/IPに準拠。 シンプルなAPIにより簡易なプログラミング開発環境を提供します。 遠隔操作(マスタ・スレーブ制御) 手の動作の遠隔教育(書道、絵画、手術など各種動作) クライアント反力 ハプティックデバイス , ロボットの遠隔操作 HCT 操作者がマスタシステムを操縦することで、動作 命令を行ない、遠隔地のスレーブシステムを遠 隔操作をすることが可能です。 クライアント位置 分散処理(プラットホーム間ブリッジ) 干渉計算結果 組付け・分解シミュレータ HCT (干渉計算と描画計算を別のPCで分散処理) 3Dマウスによる 部品の操作情報 異なるプラットホームで、描画計算と干渉計算を 分散処理して、高パフォーマンスのVRシステム を構築することが可能です。 Wanda 3D Pointer with Programmable Buttons 核融合炉組立シミュレータ データ提供:自然科学研究機構 核融合科学研究所 特長 ・高速なデータの送受信 1KHzオーダーの高速なデータ送受信 (ハプティックデバイスとの高い親和性) 途中でのパケットロスや遅延の影響を最小限に抑え るため、受信側では常に最新のデータを選択します。 ・ネットワーク送受信できる力覚情報 力覚呈示デバイスの位置、反力、オブジェクトの位置、 その他定義する任意情報。 ・複数接続対応 接続できるマシン数は無制限 <Windows> Microsoft Windows XP以降 コンパイラ: Microsoft Visual C++ 6.0 /.NET 2003以降 <Linux> カーネルバージョン: 2.4.31以降 / 2.6.11以降 コンパイラ: GCC 3.3.2以降 / GCC 4.0以降 <IRIX> IRIXバージョン: 6.5.5m以降 コンパイラ: MIPSpro C++ 7.3.0以降 <共通> OpenHaptics Toolkit Ver1.0以降 GLUT 3.7(サンプルプログラム用) 動作推奨環境 (PC) 製品構成 ソフト:Haptic Communication Toolkit × 1本 (サンプルプログラム付属) ハード:3次元力覚入出力デバイス Geomagic Touch × 2台 価格 120万円(税込1,296,000円) 株式会社スリーディー 開発環境 OS::Windows XP(32/64bit)以降 CPU:特に制限なし、Dual Core 以上を推奨 HDD:50MB以上の空き容量 メモリ:128MB以上 ビデオカード:OpenGL対応ボード 〒222-0033 神奈川県横浜市港北区新横浜 2-3-8 KDX 新横浜ビル 4F TEL.050-5533-3380 http://www.ddd.co.jp/contact/
© Copyright 2026 Paperzz