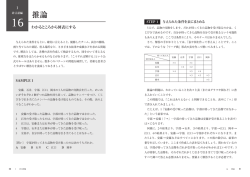
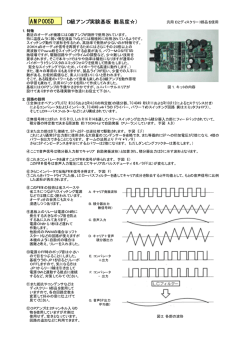
サイリスタブレーキの動作原理 1.誘導電動機の回転原理 誘導電動機は三相交流電源で回転します。三相交流電源は三本の線から三つの異なった位 相の交流電圧が供給されています。360 度を 3 分割して 120 度の位相差の電圧です。この電 圧で、3 個の機械的に 120 度づつずらせた位置に配置されているコイルを駆動します。そうす ると丁度磁石を回転させたような磁界が発生します。これを回転磁界といいます。この回転 磁界の中に回転子が有ると回転磁界につられて回転します。 右の図のようにアルミの円盤の下で 磁石を動かすとアルミの円盤が磁石に つられて回転します。これをアラゴの 円盤といいますが、誘導電動機もこれ と同じように三相交流電源によって作ら れた回転磁界によって回転子が回転しま す。 図 1→ 2.誘導電動機の回転数 三相誘導電動機は三相交流で作られた回転磁界で回転しますから、60Hz であれば 1 秒間 に 60 回転します。2 極のモータであれば 60 回転/秒ですが、4 極のモータであれば 30 回転/ 秒となります。 3.誘導電動機の回転数とトルク 図2 三相誘導電動機のトルクは図 2 のようになります。回転磁界と同じ速度が同期速度となり ます。実際の回転数と同期速度の差を滑りといいます。滑りが大きくなるに従って、トルク は大きくなりますが停動トルクの点で最大となります。起動時のトルクはそれよりも小さく なります。 4.ダイナミックブレーキ サイリスタブレーキはダイナミックブレーキを使っています。ダイナミックブレーキは三 相誘導電動機に直流電流を流します。直流電流を流すということは図 2 の同期速度がゼロに なります。同期速度がゼロの状態でモータを回転させますから図 2 と反対のトルク、すなわ ち負のトルク(制動トルク)が発生します。 モータが定格速度で回転している状態で最初 は比較的に大きな制動トルクが発生します。最初 は速度が落ちるに従って、制動トルクは大きくな りますが有る点からは、図 3 のように速度が落ち るに従ってトルクも小さくなります。 制動トルクは流す直流電流によって大きさが 変わります。制動時は通常、定格電流の 2 倍から 4 倍位の電流を流します。モータの起動電流は定格 電流の 5 倍から 6 倍位流れますから、時間が短け ればモータの発熱も問題有りません。 図3 5.サイリスタブレーキの種類 1) 半波整流型 小型のサイリスタブレーキは、コストを下げる為 にサイリスタによって半波整流を行っています。電流 を変える為にサイリスタで位相制御を行っています。 その為に電源には短いパルス状の電流が流れます。 図4 2) 全波整流型 トランスを使えば、二次側の電圧を下げて、しか も位相角を大きくできるので波形の乱れをかなり小さ くできます。さらにセンタタップ方式の全波整流を行 えばさらに効果的です。 二次側の電圧は約 50V ですから、単純に考えて 一次側の電流は 1/4 になります。 図5 更に 400V 級のモータの場合もトランスの一次電圧を 400V に設定すれば、モータの電流 に対して一次電流をさらに下げられます。 一次側の電圧が 200V で二次側の電圧が 50V の場合に、一次側の実効電流は二次側の直 流電流に対して約 3.15 分の 1 になります。
© Copyright 2026 Paperzz