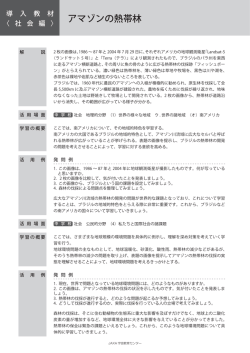
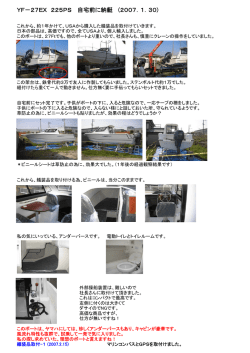
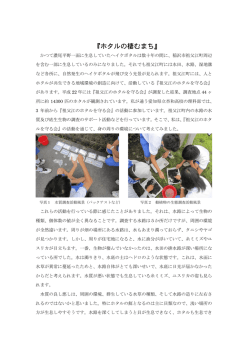
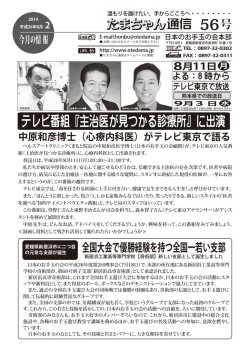
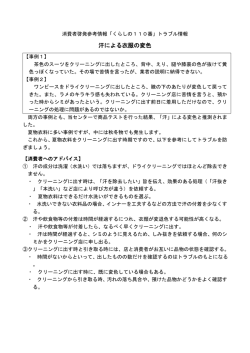
質点系と剛体の運動について KENZOU 2005 年x月x日 力学の基礎である質点系と剛体の運動について少し整理してみようかなと思い立ち(←その理由はよく分から ないが:笑い)、以下のレポートと相成った次第。式の変形はできるだけ細かいところまでフォローしているの で、目で追っても分かると思う(←つもり)。 1 運動の自由度 空間を自由に動く質点を記述するには x − y − z の 3 つの座標の指定しなければならない。2 質点系 では各質点の x − y − z (あるいは r − θ − φ) を指定しなければならないから、合計 6 つの変数が必要 となる。一般に N 個の質点系では 3N 個の変数が必要となる。系を既述するのに必要な変数の数を自 由度という。N 個の質点系の自由度は 3N である。 この系に運動を制限する条件、いわゆる束縛条件(拘束条件)が r 個ある場合、自由度は独立な束縛 条件の数だけ減り、3N − r 個となる。 2 2.1 質点系の運動 運動方程式 n 個よりなる質点系を考える。質点 mi の位置 ri 、運動量 pi 、系内の質点 i, j 相互に働く内力 Fji 、 系外から質点 i に作用する外力 Fi とすると、各質点の運動方程式は n X d2 ri mi 2 = Fi + Fij , dt j̸=i もっと具体的に書くと (i = 1, 2, · · · , n) d2 r1 m1 2 = F1 + F12 + F13 + · · · dt 2 d r2 m2 2 = F2 + F21 + F23 + · · · dt d2 r3 m3 2 = F3 + F31 + F32 + · · · dt .. . (1) (2) 式 (2.1) の辺々を加え、作用反作用の関係(N ewton の運動の第 3 法則)Fij = −Fji を考慮すると次 式を得る。 X d2 ri X mi 2 = Fi (3) dt 1 2.2 運動量 式 (3) の左辺は各質点の運動量 pi = mi ṙi の和であるから、これを P と書いて質点系の運動量と定義 すれば n dP X = Fi (4) dt i これから、質点系の運動量の時間変化の割合は、この系に作用する外力の和に等しいということにな る。また、外力が作用しない質点系(閉じた系)では、Fi =0 となるから P = 一定となる。つまり、外 力が作用しない質点系ではその運動量は時間変化に対して不変である(運動量保存則)ということが 導かれる。 2.3 角運動量 次に、質点系の角運動量の時間変化はどのように表されるだろうか、これを調べてみよう。質点 mi の原点 O の周りの角運動量は Li (= ri × pi ) と表される。個々の質点の角運動量の時間変化は次式で表 される。 dL1 = r1 × (F1 + F12 + F13 + · · · dt dL2 (5) = r2 × (F2 + F21 + F23 + · · · dt dL3 = r3 × (F3 + F31 + F32 + · · · dt 辺々加え合わせると X dL X = ri × Fi = Ni = N (6) dt となる。ここで L は系の全角運動量で、N は原点周りの外力のモーメントある。式 (6) が我々が求め ようとしていた方程式である。大変すっきりした形になった。特に、外力が作用しない閉じた系では Fi =0、つまり L = 一定となって角運動量が保存される(角運動量保存則)ことが分かる。 2.4 エネルギー 式 (1) の運動方程式に ṙi を掛け、これらを加え合わせると n X ¢ 1 d ¡ mi ṙi r̈i = mi ṙ2i = ṙi Fi + Fij 2 dt j̸=i n X X ¢ 1X d ¡ ṙi Fi + mi ṙ2i = Fij 2 dt i i j̸=i X ′ X Fi · ṙi Fi · ṙi + = (7) i i ′ ここで Fi は質点 mi に作用する内力の総和である。さて、時刻 t0 から t に掛けて積分すると " 1X mi ṙ2i 2 i #t t0 = Z t "X t0 i 2 Fi · ṙi + X i ′ # Fi · ṙ dt (8) 式 (8) の右辺は内力及び外力の時刻 t0 から t の間になした仕事の和 W 、W ′ を表している。また、右 辺は質点系の時刻 t と t0 における全運動エネルギーの差(T − T0 )である。 T − T0 = W + W ′ (9) 内力がポテンシャル U ′ を有するとき、質点 mi に働く内力の、x, y, z 成分は − ∂U′ , ∂xi − ∂U ′ , ∂yi − ∂U′ ∂zi (10) であるから、内力のなした仕事 W ′ は Z tX ′ W′ = Fi · ṙdt t0 i ¶ Z tXµ ′ ′ ′ ∂U ∂U ∂U = ,− ,− · ṙdt − ∂x ∂y ∂z t0 i i i i = −(U ′ [t] − U ′ [t0 ]) ′ ′ = −(U − U0 ) (11) T + U ′ = E とすれば式 (9) と (11) より T − T0 = W − (U ′ − U0′ ) ′ ′ (T − U ) − (T0 − U0 ) = W E−E =W (12) 0 これから、ある時間内の質点系のエネルギーの増加は、その時間に働く外力のなした仕事の和に等し い、ということになる。尚、E は質点系の全エネルギー、U ′ を内部エネルギーと呼んでいる。外力が 作用しない閉じた系では E = 一定となり、エネルギー保存則が成り立つ。外力がポテンシャル U から 導かれるときには、上の議論と同様にして E + U = 一定 (13) となる。 重心座標系から見た質点系の運動 3 今までは空間に固定された原点から個々の質点の運動を見てきた。ここで視点を変えて、質点系の重 り やく 心を原点とする重心座標系から運動方程式を見直してみよう。こうすることのご利益はすぐあとで分 かる。 3.1 重心座標系 質点系の運動を考えるとき、最も都合のよい座標系が重心座標系である。ところで、まず最初は重心 が座標原点からみてどのように運動するかを調べてみよう。 重心(または質量中心)の位置を R、全質量を M とすると、R は次式で定義される。 R= m X mi ri /M, i=1 M= n X i=1 3 mi (14) G r′ i R mi ri 0 図 1: 重心 G に対する位置(重心座標系) 3.2 運動量 重心の速度を V とすると X dR X dri V = = mi /M = mi vi /M dt dt = P/M X P = mi vi = M V(質点系の全運動量) (15) となって、重心の運動方程式は dP X d2 R = = Fi 2 dt dt となり、式 (4) と同じ式がでてくる。これから次のことが言える。 M (16) a) 質点系の運動は系の全質量とすべての外力が重心に集中したと考えたときの運動に等しい。つま り、重心の運動は外力のみによって決まり、内力には無関係である。 b) 外力が作用しない質点系(閉じた質点系という)、または外力の総和が 0 となる質点系では全運 動量は保存され、従って重心の速度は一定である。 さて、いよいよ重心を原点とした重心座標系で質点系の運動を記述してみよう。重心に対する相対座 標を r’i とすると、図 (1) から r’i = ri − R (17) 重心を原点とする重心系座標での運動量 p’i は p’i = mi dR dr’ = pi − mi dt dt (18) となる。次に、式 (17) の両辺に mi を掛け、i について総和をとって式 (14) を利用すると n X i=1 が得られる。これから n X i=1 mi (ri − r’i ) = mi r’i = 0, n X n X mi R = M R (19) mi ri (20) i=1 = X mi X dr’i mi v’i = 0 = dt n i=1 i=1 この関係式は後で利用するので覚えておこう。 4 (21) 3.3 運動エネルギー 式 (17) より、 ri = R + r’i , vi = V + v’i , v’ : 重心 G に対する(重心座標系での)速度 (22) 質点系の全運動エネルギー K は 1X 2 mi vi K = 2 X X 1X 1 2 2 = mi V + mi v’i + ( mi v’i )V 2 2 1 1X 2 2 = MV + mi v’i 2 2 (23) となる。ここで式 (21) を使った。 質点系の全運動エネルギーは「重心の運動エネルギー+重心座標系での各質点の運動エネルギーの総 和」で表されることが分かる。つまり、2 つの項に分離できるというわけである。 3.4 角運動量 次に、全角運動量 L を重心座標系で表してみよう。 L= n X Li = i=1 n X i=1 = = = = dri mi ri × dt µ ¶ dR dr’i mi (R + r’i ) × + dt dt i=1 n n n X dr’i X dR X dr’i dR mi mi r’i × mi r’i × +R× + + MR × dt dt dt dt i=1 ! i=1 n à i=1 n n X X X dr’i dR d mi r’i × MR × mi r’i × R + mi r’i + + R× dt dt dt i=1 i=1 i=1 n X dR dr’i R×M + mi r’i × dt dt n X i=1 = L0 + L’ n (24) X dr’i dR mi r’i × , L’ = である。尚、式 (24) の展開でベクトル外積の公式 dt dt i=1 a × b = −b × a を使った。全角運動量の時間変化の方程式は、 dL dL0 dL’ = + dt dt dt n X dL0 = N0 ; N0 = R × Fi (25) dt i=1 n X dL’ = N’ ; N’ = r’i × Fi dt ここで L0 = R × M i=1 となり、ここでも重心の原点周りの角運動量の時間変化と重心を原点とする角運動量の時間変化の和と いう 2 つの項に分離できることが分かる。 5 質点系力学の締めくくり 4 質点系力学のお話の締めくくりとして 2、3 の問題を取り扱ってみよう。 4.1 2 体問題 相互に作用を及ぼしあう 2 個の質点 m1 , m2 の運動を調べてみよう。2 質点の位置ベクトルを r1 ,r2 とする。質点 m1 から m1 に向かうベクトルは r1 − r2 であるから、この方向に沿うて作用する力を F (r1 − r2 ) とすれば、m1 が m2 に及ぼす力は −F (r1 − r2 ) と書ける(力の大きさは F |r1 − r2 | である)。 運動方程式は d2 r1 m1 2 = F (r1 − r2 ) dt 2 d r2 (26) m2 2 = −F (r1 − r2 ) dt 式 (26)の辺々加えると、R を重心の位置ベクトルとして d2 r1 d2 r2 d2 R m1 2 + m2 2 = M 2 = 0 dt dt dt これから R̈ = 0 (27) となる。すなわち、重心は等加速度運動を行う。次に、式 (26) の差をとると、r = r1 − r2 として ¶ µ 1 1 + F (r) r̈1 − r̈2 = r̈ = m1 m2 (28) 1 m1 m2 = F (r1 − r2 ), µ = µ m1 + m2 これから µ d2 r = F (r) dt2 (29) を得る。 m1 r1 − r2 µ r1 m2 r r2 m2 (0’) 0 図 2: 2 体問題 これは質点 m2 の運動を考慮したときの質点 m2 に対する質点 m1 の相対運動は、質量 µ なる質点 が固定点 r2 から同形の中心力に結ばれているときの運動方程式と同じであることを意味している1 。 1 手っ取り早く言うと、質点 m2 の周りを質量 µ の質点が F の作用を受けて行う運動と同じということ。 6 µ ¶ 1 1 1 つまり、閉じた系での 2 つの質点の運動は、一方の質点は他の質点に対し = + で定め µ m1 m2 られる質量 µ を持つ質点と同じ運動をするということになる。この µ を換算質量と呼んでいる。地球 の質量は m2 = 5.98 × 1024 kg、月の質量は m1 = 7.35 × 1022 kg、これから、地球と月の換算質量は µ = 7.26 × 1022 kg とでる。地球に対する月の運動は、地球が固定されていて月の質量が µ であるとき の運動に等しいということになる。 次にこの 2 質点系の角運動量 L と運動エネルギー T を求めてみよう。 L = r1 × m1 ṙ1 + r2 × m2 ṙ2 (30) 1 1 T = m1 ṙ21 + m2 ṙ22 2 2 また r = r1 − r2 m1 r1 + m2 r2 R = m1 + m2 より (31) m2 r → m1 ṙ1 = µṙ + m1 Ṙ m1 + m2 m1 r r2 = R − → m2 ṙ2 = −µṙ + m2 Ṙ m1 + m2 r1 × m1 ṙ1 = r1 × (µṙ + m1 Ṙ) = r1 × µṙ + m1 r1 × Ṙ r1 = R + r2 × m2 ṙ2 = r2 × (−µṙ + m2 Ṙ) = −r2 × µṙ + m2 r2 × Ṙ これから L = µr × ṙ + M R × Ṙ 1 1 T = M Ṙ2 + µṙ2 , M = m1 + m2 2 2 (32) (33) これらの結果はセクション 3.3、3.4 で述べた通りである。 4.2 質量の変わる物体の運動 ガスを噴射しつつ進むロケットや落下する雨滴の運動などは質点系の運動とみなすことができる。 t + dt 時間後 時間 t、質量 m、速度 v 質量 −dm 速度 v + v ′ 質量 m + dm 速度 v + dv 図 3: 質量の変化する物体の運動 ■質量が減少するケース(ロケットの運動) 時刻 t での物体の質量を m(t)、速度を v(t)、dt 時間後に質量 dm(< 0) が速度 v′ で物体からはなれて 飛び出すとする。時刻 t でのこの系の運動量 Pt は Pt = mv 7 (34) t + dt におけるこの系の運動量 Pt+dt は (m + dm)(v + dv) と飛び出し素片の運動量 v′ (−dm) が v′ の 和であるから Pt+dt = (m + dm)(v + dv) − v′ dm (35) 運動量の変化はこの系に働く外力の力積 Fdt に等しいから Pt+dt − Pt = (m + dm)(v + dv) − v′ dm − mv = mdv + (v − v′ )dm = Fdt (36) これから dv dm =F+u , (u = v − v′ ) (37) dt dt これが求める運動方程式である。ここで u は分離後の親物体に対する飛び出し素片の相対速度で、式 (37) の右辺第 2 項は飛び出した素片からの反作用力となる。 m この方程式を一様重力場の中を鉛直方向に打ち上げられたロケットに適用してみよう。単位時間に α の 割合で後方に一定質量のガスを相対速度 u で噴射しつつロケットが上昇するとすると、運動方程式は、 時刻 t におけるロケットの質量 m は初期値を m0 として m = m0 − αt となるから dv m = −mg + αu dt (38) dv αu = −g + dt m0 − αt 初期値 t = 0 で v =0 を考慮して積分すると ¯ ¯ ¯ ¯ α t¯¯ v = −gt − ulog ¯¯1 − m0 t = 0 でロケットの高さ h = 0 とすると、もう一度積分して ¯ ¯ ½µ ¶ ¾ ¯ 1 2 um0 α ¯¯ α α ¯ h = − gt + 1− t log ¯1 − t + t 2 α m0 m0 ¯ m0 (39) (40) ■質量が増加するケース(雨滴の運動) 次に、質量が増加するケースとして霧の中の雨滴の落下運動を調べてみよう。霧の付着による雨滴の 質量増加の時間的割合はその雨滴の表面積に比例するとする。ただし、霧は静止しているものとし、空 気抵抗は無視する。t = 0 で雨滴の半径 r = a、鉛直下方の速度 v0x 、水平方向の速度を v0y であったと しよう。 半径 r の雨滴の質量は水の密度を 1 として m = 43 πr3 。雨滴の質量増加の時間的割合は比例係数を k と して dm = k4πr2 (41) dt これから dr = kdt (42) が得られる。雨滴の運動方程式は鉛直方向 (x 方向) を正の方向にとって d d (mvx ) = mg → k (r3 v) = r3 g dt dr 積分して kr3 vx = r4 g + C, 4 8 C は積分定数 (43) (44) a4 g が得られる。これを上式に入れて整理すると 4 g r a3 ³ g a´ vx = + 3 v0x − (45) k 4 r k 4 t = 0 で vx = v0x , r = a とすると C = ka3 v0x − 水平方向 (y 方向) の運動方程式は d (mvy ) = 0 → mvy = C ′ , dt t = 0 で vy = v0y , r = a とすると C = (46) 4 3 πa v0y が得られる。これを上式に入れて整理すると 3 vy = vx = C ′ は積分定数 a3 v0y r3 (47) dx dx =k の関係式を使うと式 (45) は dt dr dx g r a3 ³ g a´ = 2 + 3 v0x − dr k 4 kr k 4 (48) 積分して a4 g gr2 a3 v0x + − +C 8k 2 r2 8k 2 2kr2 が得られる。t = 0 で x =0 ,r = a として積分定数を求め、上式を整理すると µ µ ¶ ¶ a2 a2 a ga2 r2 1 − 2 v0x + x0 + 2 −2 + x= 2 8k a2 r 2k r x= 全く同様にして a y= 2k (49) (50) µ ¶ a2 1 − 2 v0y + y0 r (51) が得られる。あと、X = x − x0 ,Y = y − y0 とおいて上の 2 式から r を消去すると雨滴の軌跡の方程 式がでるが、これは読者にお任せする。 4.3 2 粒子の衝突 静止した質量 m2 の質点に初速度 v1 で質量 m1 の質点が完全弾性衝突し、衝突後、質点 m1 , m2 はそ れぞれ θ1 , θ2 の方向に散乱したとしよう。2 質点の衝突を空間に固定された座標系 (実験室系) から見た 場合と重心を原点とする座標系 (重心系) から見た場合を図に示す。 ≪実験室座標系≫ 衝突前 y x 衝突後 m1 m2 v1 静止 m1 θ1 θ2 m2 ≪重心座標系≫ v1′ 衝突前 m1 u1 衝突後 m2 重心 u2 θ m2 u′2 v2′ 9 m1 重心 u′1 2 質点の衝突前は、その距離が次第に縮まってくるから、重心系に載ってこの様子を眺めると質量 m2 の質点が重心に迫ってくるように見える。重心に対する相対速度を u2 、質量 m1 の重心に対する相対 速度を u1 とし、実験室系から見た重心の速度を V とすると速度の合成則2 より u1 = v1 − V u2 = 0 − V (52) m1 V = v1 m1 + m2 衝突後、2 質点は互いに離れていくが、重心系から眺めると一つの直線上を互いに逆方向に遠ざかって いくように見える3 。2 質点の遠ざかる速度をそれぞれ u′1 , u′2 とする。この質点系には外力が作用して いないのでこの系の運動量は保存される4 。 ■運動量の保存 実験室系での運動量保存の式を x, y 方向に分けて書くと m1 v1 = m1 v1′ cosθ1 + m2 v2′ cosθ1 0 = m1 v1′ sinθ1 − m2 v2′ sinθ2 (53) 一方、重心系では式 (21) により、この系の運動量の総和は 0 であるから、 m1 u1 + m2 u2 = m1 u′ 1 + m2 u′ 2 = 0 つまり、 m1 u1 = −m2 u2 m1 u′ 1 = −m2 u′ 2 (54) (55) で、重心系での 2 質点の運動量は大きさが同じで向きが反対である5 。 ■エネルギーの保存 完全弾性衝突であるから系の運動エネルギーは衝突の前後で保存される。 実験室系では 1 1 1 m1 v12 = m1 v1′2 + m2 v2′2 2 2 2 (56) 重心系では 1 1 1 1 ′2 m1 u21 + m2 u22 = m1 u′2 1 + m2 u 2 2 2 2 2 式 (57) の左辺は式 (52) を使うと 2 m2 m1 u1 = v1 , u2 = v1 m1 + m2 m1 + m2 1 1 1 m1 m2 2 1 2 m1 u21 + m2 u22 = v = µv1 2 2 2 m1 + m2 1 2 (57) (58) Galilei 変換:ある物体の位置を r で示し、その座標系に対して速度 V で動いている座標系におけるその物体の座標を dr′ (t) dr(t) r とするとき r′ (t) = r(t) − V, = − V が成り立つ。 dt dt 3 重心は 2 質点を結ぶ直線上に存在するから。 4 式 (4)、(16) を参照。 5 そもそもそのように見える座標系の原点が「重心」の定義であったことを思いだそう。 ′ 10 1 これから重心系での運動エネルギーは µv12 と書けることがわかる。 2 式 (57) の右辺を式 (55) を使って変形すると 1 1 1 m1 1 m21 ′2 ′2 ′2 m1 u′2 + m u = (m + m )u = u 2 2 1 2 1 1 2 2 2 m2 2 µ 1 これらから 同様にして 1 2 1 m21 ′2 µv = u 2 1 2 µ 1 m2 µ v1 = v1 = u1 = v1 − V u′1 = m1 m1 + m2 u′2 = u2 = −V (59) (60) (61) が導かれる。 ■実験室系と重心系の速度と散乱角の関係 u′1 + V = v1′ (62) u′2 + V = v2′ より、衝突後の実験室系と重心系の速度の関係を図示すると次のようになる。 v1′ u′1 θ 0 u′2 θ2 θ1 V v2′ 図 4: 実験室系と重心系の間の速度・散乱角の関係 u′1 cosθ + V = (v1′ − V)cosθ + V = v1′ cosθ1 u′1 sinθ = (v1′ − V)sinθ = v1′ sinθ1 これから という関係が導かれる。ここで (v1′ − V)sinθ tanθ1 = V + (v1′ − V)cosθ sinθ = V + cosθ (v1′ −V) sinθ = 1 cosθ + m m2 (v1′ m1 V = を利用した。これから − V) m2 11 (63) (64) ( ) m1 ≪ m2 のとき、θ1 ≅ θ ( ) m1 = m2 のとき、θ1 = θ 2 ( ) m1 ≫ m2 のとき与式より θ は大変小さな値となる。このとき、tanθ = θ + m2 るので θ1 ≅ sinθ m1 4.4 θ3 3 + · · · と展開でき Rutheford 散乱 2 粒子の衝突問題をやったので、ついでにこのセクションの最後として Rutherford 散乱を扱うこと にしよう。α 粒子 (質量 m, 電荷 2e) が左遠方より速さ v0 で入射し、座標原点に静止している原子核 (電 2Ze2 荷 Ze) からのクーロン斥力 f (r) = 4πϵ 2 を受けて運動するものとする。 0r f fy fx +2e α 粒子 b0 r v0 φ θ 散乱角 +Ze 原子核 図 5: Rutherford 散乱 Newton の運動方程式は d2 x m 2 = f (r)cosφ dt d2 y m 2 = f (r)sinφ dt (65) このままでは取り扱いにくいので極座標 (x = rcosφ, y = r sin φ) に変換しよう。 dx dt dy dt d2 x dt2 d2 y dt2 = = = = dr dφ cosφ − rsinφ dt dt dr dφ sinφ + rcosφ dt dt d2 r dr dφ sinφ − cosφ − 2 dt2 dt dt d2 r dr dφ cosφ + sinφ + 2 dt2 dt dt 式 (65) に (66) を代入して整理すると µ ¶2 d2 φ dφ rsinφ − rcosφ dt2 dt ¶ µ 2 2 d φ dφ rsinφ rcosφ − dt2 dt µ ¶2 # d2 r dφ − r = f (r) m dt2 dt · ¸ d2 φ dr dφ +r 2 = 0 m 2 dt dt dt " 式 (67) の第 2 式を書き直すと d m dt µ ¶ 2 dφ r =0 dt 12 (66) (67) となる。これから dφ = 一定 = L (68) dt となり、これは角運動量保存則を表している。今、遠方から速度 v0 で入射してくる α 粒子の角運動量 L は図 (5) より L = mv0 b であるから、式 (68) は mr2 r2 dφ = v0 b dt (69) これを式 (67) に代入すると d2 r v02 b2 2Ze2 1 f (r) = − = (70) dt2 r3 m 4πϵ0 mr2 これを解けば r = r(t) が求められる。それを式 (69) に代入すると φ の従う微分方程式が得られ、それ を解くことで解 φ(t) が得られる。が、これは少し回りくどいやり方なので、ここでは r が φ を通して t の関数であるということを使って計算を進めてみよう。 となる。ここで u = 1 とおくと r dr dr dφ v0 b dr = =− 2 dt dφ dt r dφ (71) du du dr 1 dr = =− 2 dφ dr dφ r dφ (72) したがって、 dr du = −v0 b dt dφ µ ¶ d2 u v0 b d2 r d du dφ v 2 b2 d2 u = −v0 b 2 2 = − 0 2 ∴ 2 = −v0 b dt dφ dφ dt dφ r r dφ2 これを式 (70) に代入すると ¶ µ d2 u 2Ze2 =− u+ dφ2 4πϵ0 M v02 b2 (73) (74) が得られる。右辺の括弧内を w とおくと式 (74) は、もっとも簡単な単振動の方程式 d2 w = −w dφ2 に還元できる。この微分方程式の一般解は w = Acos(φ + α) であるから 1 2Ze2 = Acos(φ + α) − r 4πϵ0 M v02 b2 (75) 式 (75)) が α 粒子の軌道方程式である。解 (75) の中の定数 A と α は初期条件から決められる。両辺を t で微分し、整理していくと µ ¶ d 1 dφ = −Asin(φ + α) dt r dt dφ 1 dr (76) = −Asin(φ + α) − 2 r dt dt dr = −Av0 bsin(φ + α) dt ここで r = −∞, φ = π において dr dt = −v0 であるからこれらを式 (75)(76) に入れると 2Ze2 Acosα = − 4πϵ0 M v02 b2 Absinα = −1 13 (77) となるから 4πϵ0 M v02 b2 (78) 2Ze2 となり、定数 α はこの式から求めることができる。その結果と式 (79) を使って定数 A が求まる。 tan α = ■最接近距離 左遠方 (r = −∞, φ = π) から入射した α 粒子は右方向に進むにつれて角度 φ は π から減少し、原子 核 (原点) に最も近い最近接点を通過して遠方に遠ざかっていく。最近接点は原点からの距離 (rmin ) が 最小となり、動径方向の速さが dr/dt = 0 の点である。従って式 (76) より最近接点の角度 φ を求める と、φ = π − α となる。尚、b0 を衝突パラメータと呼んでいる。 最近接点 α 粒子 α v0 b0 θ 散乱角 α +Ze 原子核 最近接距離 rmin は α 粒子の軌道の式 (75) から求めることが出来るが、ここではエネルギー保存則から 求めることとする。エネルギー保存則は "µ ¶ µ ¶2 # dr 2 1 1 dφ 2Ze2 m = mv02 (79) + + r2 2 dt dt 4πϵ0 r 2 2 となる。式 (79) に入れて整理すると 左辺第 1 項は最近接点では 0、第 2 項は式 (69) より v02 b2 /rmin µ ¶ 4k Ze2 2 2 rmin − (80) r − b = 0, k = min 4πϵ0 mv02 rmin に関する 2 次方程式を解くと rmin s µ ¶2 k Eb , = 1+ 1+ E k 1 E = mv02 2 (81) 剛体の運動 5 剛体の運動を調べる前に、その下準備として回転座標軸におけるベクトル A の時間変化を調べる。 5.1 回転運動をなす座標軸 ある軸の周りに剛体が角速度 w で回転しているとき、剛体内の一点 P の速度 v を求めてみよう6 。軸 上の定点を O とし、点 P から軸への垂線を PN とすれば、点 P は N を中心とし、PN を半径とする円 運動をなす。点 P の速度 v は従って、 dr v= =w×r (82) dt となる。静止座標軸に対してベクトル A が角速度 w をもって回転するときには、その変化率は点 P 6 角速度 w は回転ベクトルとも呼ばれる。 14 N P v r w O 図 6: 剛体の回転 の速度であるから dA =w×A (83) dt いま、静止している直交軸 Ox、Oy 、Oz の原点 O の周りに書く速度 w をもって回転している直交 軸を Ox′ 、Oy ′ 、Oz ′ とし、その基本ベクトルを i’、j’、k’ とする。と、式 (90) より di’ = w × i’, dt y′ dj’ = w × j’, dt dk’ = w × k’ dt (84) y A x′ j’ i’ x O 図 7: 回転座標軸 また、Ax′ = i’ · A, Ay′ = j’ · A, Ak′ = k’ · A であるから dAx′ dA di’ dA dA = i’ · + · A = i’ · + (w × i’) · A = i’ · + (A × w) · i’ dt dt dt dt µdt ¶ dA = i’ · −w×A dt µ ¶ dAy′ dA = j’ · −w×A dt dt µ ¶ dAz ′ dA = k’ · −w×A dt dt (85) が得られる。これから µ dA dt ¶′ = µ dAx′ dAy′ dAz ′ , , dt dt dt 15 ¶ = dA −w×A dt (86) あるいは ここで µ dA dt ¶′ µ dA dt ¶ = dA’ +w×A dt (87) は回転座標軸に対する点の相対速度である。 ■相対速度 式 (86) において、A の代りに運動する点の位置ベクトル r をとれば µ dr dt ¶′ = dr −w×r dt (88) 回転座標軸に対する相対速度を v’ とすれば、式 (88) は、 v’ = v − w × r 5.2 (89) 剛体の運動 剛体内の任意の点の速度 v は式 (90) より v = v’ + w × r で与えられる。 16 (90)
© Copyright 2026 Paperzz