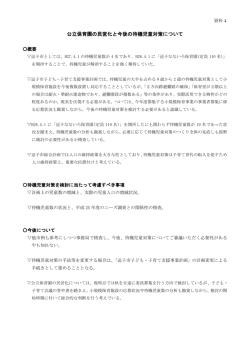
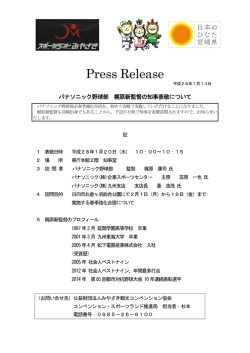
SIP 自動走行システム 推進委員会(第20回)【公開】 平成28年 1月21日(木) 15時15分~16時30分 於:中央合同庁舎8号館6階 623会議室 【議題】 1.非公開議事(14:30~15:15 済) 以下、公開議事 2.事務局連絡 (1) 各施策の進捗状況報告 3.各 WG 進捗・成果 (1) システム実用化 WG ① WG 活動概要報告 ② 中間報告:総1施策報告 (2) 次世代都市交通 WG ① WG 活動概要報告 ② ART 関係報告 (3) 国際連携 WG ① WG 活動概要報告 ② 今後の国際連携活動について ③ TRB 年次総会報告 ・ 次回会議予定 ・第 21 回推進委員会 :3 月 2 日(水) 10:00~12:00 @中央合同庁舎 8 号館 6 階 623 会議室 【配布資料】 資料20-2 資料20-3 資料20-3-1-1 資料20-3-1-2 資料20-3-2-1 資料20-3-2-2 資料20-3-2-3 資料20-3-2-4 資料20-3-3-1 資料20-3-3-2 資料20-3-3-3 施策進捗管理表 (160121 版) 前回報告以降の WG 議論状況 システム実用化 WG カバーシート 中間報告:総1施策報告 次世代都市交通 WG「WG 概要報告」 カバーシート 次世代都市交通 WG「ART 関係報告」 カバーシート 連結バスによる正着要件の検討と実験結果 ART 向け技術の検討状況 国際連携 WG カバーシート 今後の国際連携活動について TRB 年次総会 参加報告 参考資料1 自動走行システム推進委員会(第 19 回)議事要旨 1 資料20-2 SIP「自動走行システム」 2015年度施策一覧 0.58a版 2015年度 施策一覧 (施策呼称) 【内閣府】 内1 H27施策進捗状況 WGでの説明状況 テーマ名(仮称) 受託会社 WG 施策 内容 受託時 説明 (内1-①-15) 地図情報の高度化(情報のアッセンブリと構造化) システム実用化 5/27 9/09 ■ ■ ■ ■ ■ ダイナミックマップ 構築検討コンソーシアム ② (内1-③-15) (内1-④-15) (内1-⑤-15) (内1-⑥-15) (内1-⑦-15) (内1-⑧-15) 国際連携 次世代都市交通 次世代都市交通 次世代都市交通 次世代都市交通 次世代都市交通 5/27 5/13 5/13 5/13 6/10 7/8 10/14 10/14 10/14 → → 1/13 1/13 1/13 ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ コングレ 先進モビリティ パシフィックコンサルタンツ 計量計画研究所 システム実用化 4/22 11/11 1/13 ■ ■ ■ ■ ■ 交通事故総合分析センター ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ UTMS協会 住友電工システムソリューション UTMS協会 UTMS協会 UTMS協会 住友電工システムソリューション - - - ■ ■ ■ ■ ■ ■ デンソー パナソニック パナソニック システムネットワークス (中間) 期末 作成中 募集中 選定中 契約 実施 特記事項 自動走行システムの実現に向けた諸課題とその解決のための調査・検討 衛星測位活用に向けた基礎評価に関する調査 自動走行システムにおける国際協調活動の推進に係る調査 次世代都市交通システム要件の実現可能性に係る調査 次世代都市交通システムの速達性・安全性・交通分担率の変革に係る調査 世界標準のアクセシビリティーを目指す市民参加型の混雑・渋滞予測に係る調査 公共交通の乗降時間短縮に係る調査 歩行者移動支援システムの共通基盤研究 内2 交通事故死者低減の国家目標達成に向けた調査・検討 ① 詳細効果見積もりのためのシミュレーション技術に係る調査 (内2-②-15) 交通事故死者低減効果見積もり解析手法に係る調査 平成27年度より経済産業省で実施 1/15 開札 1/19 開札 平成27年度より経済産業省で実施 【警察庁】 警1 (警1-15) 警2 (警2-15) 警3 (警3-15) 警4 (警4-15) 警5 (警5-15) 警6 (警6-15) 信号情報の活用による運転支援の高度化 交通規制情報の活用による運転支援の高度化 電波を活用した安全運転支援システム(DSSS)の高度化 次世代公共道路交通システムの開発に向けた基本設計 交通制約者及び歩行者の移動支援システムの開発に向けた基本設計 国際的に開かれた研究開発環境の整備 システム実用化 システム実用化 システム実用化 次世代都市交通 次世代都市交通 システム実用化 6/24 6/24 6/24 7/8 7/8 6/24 11/11 1/13 11/11 11/11 11/11 12/22 【総務省】 総1 (総1-①-15) (総1-②-15) (総1-③-15) ICTを活用した次世代ITSの確立 車車間通信・路車間通信技術の開発 歩車間通信技術の開発 インフラレーダーシステム技術の開発 システム実用化 システム実用化 システム実用化 5/27 5/27 5/27 9/30 9/30 9/30 【国交省】 総1 (総1-④-15) (総1-⑤-15) (総1-⑥-15) 国2 (国2-15) 国3 (国3-15) ICTを活用した次世代ITSの確立 携帯電話ネットワーク利用型アプリケーション動作検証技術に関する調査 歩車間通信の要求条件に関する調査 車車間通信を利用した安全運転支援システムの実用化に関する調査 自動走行システムの安全性・信頼性の確保のための技術的アプローチに関する基本 自動走行システムの安全性確保に必要なHMIの要件に係る検討 システム実用化 システム実用化 システム実用化 システム実用化 システム実用化 5/27 5/27 5/27 5/27 5/27 10/21 10/21 10/21 12/22 12/09 ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ みずほ情報総研 交通安全環境研究所 芝浦工業大学 交通安全環境研究所 交通安全環境研究所 【経済産業省】 経6 (経6-②-15) (経6-③-15) (経6-④-15) (経6-⑤-15) (経6-⑥-15) (経6-⑦-15) (経6-⑧-15) (経6-⑨-15) 自動走行システムの高度化等に向けた基盤技術開発 「走行映像データベース」の構築技術の開発及び実証 信号情報等のリアルタイム活用技術等の開発及び実証 全天候型白線識別技術の開発及び実証 海外のV2X(Vehicle to X)システムに対応するセキュリティの開発及び実証 詳細効果見積もりのためのシミュレーション技術に係る調査 衛星測位活用に向けた基礎評価に関する調査 地域交通CO2 排出量の可視化 レベル3/4の実現に向けた実証・事業化に係る調査 システム実用化 システム実用化 システム実用化 システム実用化 システム実用化 システム実用化 システム実用化 システム実用化 5/13 6/24 5/13 6/24 5/13 4/22 5/13 未定 10/21 11/11 10/21 11/25 11/25 11/25 12/22 → ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ 日本自動車研究所(JARI) UTMS協会 日本自動車研究所(JARI) 日本自動車研究所(JARI) 日本自動車研究所(JARI) アイサンテクノロジー パシフィックコンサルタンツ 2 1/13 1/13 1/13 大規模実証実験企画TFにて検討中 資料20-3 SIP自動走行システム推進委員会 前回報告(第18回:11月4日開催)以降の各WG 議論状況 1.システム実用化WG カバーシート:資料20-2-1-1 (1)11月11日(第31回) ① 2nd SIP-adus Workshop 開催報告(速報版) (第 18 回推進会議で報告済み) ② 受託者報告:警1 (信号情報の活用による運転支援の高度化) 受託者報告:警3 (電波を利用した安全運転支援システムの高度化) 受託者報告:経6③ (信号情報のリアルタイム活用技術) 受託者報告:内2② (交通事故死者数低減効果見積もり解析手法) (2)11月25日(第32回) ① H28 年度施策提案 (重要 5 課題リーダ提案) (第 19 回推進会議で報告済み) ② 受託者報告:経6⑤ (海外の V2X に対応するセキュリティ) 受託者報告:経6⑥ (詳細効果見積のためのシミュレーション技術) 受託者報告:経6⑦ (衛星測位活用に向けた基盤評価に関する調査) (3)12月 9日(第33回) ① レベル 3/4 を見据えた実証実験に向けて ② WRC-15 国際会議結果報告 (総務省) (第 19 回推進会議で報告済み) ③ 受託者報告:国3 (自動走行システムの安全性確保に必要な HMI) ④ H28 年度施策提案 (省庁からの提案) (第 19 回推進会議で報告済み) (4)12月22日(第34回) ① 2017 年度大規模実証実験企画 TF の新設について (第 19 回推進会議で報告済み) ② 受託者報告:国2 (自動走行システムの安全性・信頼性の確保) 受託者報告:経6⑧(地域交通 CO2 排出量の可視化) 受託者報告:警6 (国際的に開かれた研究開発環境の整備) (5) 1月13日(第35回) ① 受託者報告:警2 (交通規制情報の活用による運転支援の高度化) ② 中間報告:内2② (交通事故死者低減効果見積り解析手法) 中間報告:総1① (車車間通信・路車間通信技術の開発) 中間報告:総1② (歩車間通信技術の開発) 中間報告:総1③ (インフラレーダーシステム技術の開発) ③ 重点 5 課題「歩行者事故低減」全体スケジュールについて 3 資料 20-2-1-2 2.次世代都市交通WG カバーシート:資料20-2-2-1(WG概要),資料20-2-2-2(ART関係) (1)11月11日(第26回) ① 連結バスによる正着要件の検討とバスベイ形状に関する実験結果 資料 20-2-2-3 ② 受託者報告:警4 (次世代公共交通システムの開発に向けた基本設計) 受託者報告:警5 (交通制約者等の移動支援システムの開発) ③ 2nd SIP-adus Workshop 開催報告(速報版) (第 18 回推進会議で報告済み) (2)12月 9日(第27回) ① ART 向け技術の検討状況 資料 20-2-2-4 ② 交通制約者・歩行支援システム進捗報告 ③ H28 年度施策提案(歩行者事故低減・次世代都市交通) (第 19 回推進会議で報告済み) (3) 1月13日(第28回) ① 2017 年度大規模実証実験企画 TF の新設について (第 19 回推進会議で報告済み) ② 内閣府オリパラ TF についての情報共有 ③ 次世代都市交通 WG 関連実証実験案について ④ 中間報告:内1④ (次世代都市交通システム要件の実現可能性) 中間報告:内1⑤ (次世代都市交通システムの速達性・安全性…) 中間報告:内1⑥ (世界標準のアクセシビリティを目指す…) 3.国際連携WG カバーシート:資料20-2-3-1 (1)11月 25日(第22回) ① 2nd SIP-adus Workshop 開催報告 (正式版)(資料:抜粋) ② SMC 国際シンポジウム参加報告 ③ サイエンスアゴラ 2015「自動走行技術が創る未来社会」開催報告 ④ 総合科学技術・イノベーション会議 自動走行システム報告 (第 11 回道路交通分科会で報告済み) ⑤ 今後の国際連携活動について (2)12月 22日(第23回) ① 戦略的国際連携活動及びテーマ別窓口について ② 平成 28 年度の研究開発計画(施策の方向性等)について 資料 20-2-3-2 (第 19 回推進会議で報告済み) ③ TRB 年次総会への参加について (TRB 年次総会のプログラム概要・Trilateral ART WG の概要) ⇒ TRB 年次総会 参加報告 資料 20-2-3-3 4 資料20-3-1-1 第34回、第35回 システム実用化WGでの議論要旨 大規模実証実験 (1)大規模実証実験に向け、実証リーダーが作成したスケジュール案をもとに 官民による大規模実証実験TFにて検討を進めていくことを確認した。 (2)「ダイナミックマップ」「歩行者事故低減」の実証リーダーより、 スケジュール案を説明し議論を行った。 《主な意見》 ・ベンチャー企業などの参画についても考慮すべき。 ・オリンピックの位置づけを決める必要がある。オリンピックに引きづられ 過ぎるのもよくない。 ・対象の行動変化をどう捉えるか?は難しいが検証が必要。 H27年度施策である下記8件について受託先より研究内容に対する説明があり、進め 方について審議を行った。 平成 年度施策 27 【新規テーマ2件】 「自動走行システムの安全性・信頼性の確保のための技術検討」(国2) ⇒OUTPUT目標に適した調査方法について検討中 「地域交通CO2排出量の可視化」(経6) ⇒CO2削減ではなく‘可視化’というテーマにフォーカスして進める 【継続テーマ6件】 「国際的に開かれた研究開発環境の整備」(警6) 「交通規制情報の活用による運転支援の高度化」(警2) 「交通事故死者低減見積もり解析手法に係る調査」(内2) 「車車間通信・路車間通信技術の開発」(総1*) 「歩車間通信技術の開発」(総1*) 「インフラレーダーシステム技術の開発」(総1*) 総1テーマについては、これまでの議論を踏まえ軌道修正が行われていることが確認 できた。詳細内容については‘総1連絡会’を通して継続的に議論していく。 本日は (総1*)について 総務省より報告 その他 《総1連絡会》 今後、車車間通信、歩車間通信におけるダイナミックマップとの利用拡大について検討 を進めていくことになった。 5 資料20-3-1-2 SIP「自動走行システム」 総1施策の取組概要 2016年1月21日 総合通信基盤局電波部移動通信課 新世代移動通信システム推進室 6 SIP「自動走行システム」総1施策の活動成果概要 課題名 現在までの活動成果概要 研究実施機関 1 開発期間 <課題Ⅰ> 車車間通信を利用した救急車の接近通知アプリ ケーションの効果を検証。 自動走行システムに 必要な車車間通信・ 車両特定が難しい道路状況下における運転支援 サービスへの影響を評価。 路車間通信技術の 車車間・路車間通信の情報が重複している場合な 開発 (株)デンソー パナソニック(株) パイオニア(株) 電気通信大学 <課題Ⅱ> 歩者間通信技術の 開発 マルチパス誤差対策と危険判定方式を実現、ス マートフォン搭載への要素技術を確認。 電動車椅子による接近検知を実現、これを応用した 交差点内の歩行者位置測位に関する検討を実施。 メッセージセットの共通化に向けたWebAPI標準化推 進とプライバシー保護・基本システムを設計・開発。 パナソニック(株) (株)パナソニックシ ステムネットワークス 平成26~ 開発研究所 28年度 (株)NTTドコモ (株)KDDI総研 <課題Ⅲ> インフラレーダーシ ステム技術の開発 79GHz帯レーダーの模擬市街路環境による歩行者 識別性能等の検証を実施。 79GHz帯ミリ波の伝搬シュミレーション解析及び干渉 発生検知方法を開発。 強い降雨や降雪などの悪天候下の条件における レーダー検出性能の検証を実施。 小型の79GHz帯レーダーユニッ 7の新規導入による 公道実証に向けた事前検証を実施。 パナソニックシステ ムネットワークス (株) どのケースにおいて、影響レベルを用いた優先支援 判定手法の検討及び評価。 合流シーンにおいて自動走行を円滑に実現する為 に要求される通信性能の検討や先読み情報活用モ デルの検討。 平成26~ 28年度 平成26~ 30年度 ※下線部は研究責任者の所属する研究機関 課題Ⅰ 研究実施主体間の関係 既存プロトコルの改良・開発で連携 デンソー 既存760MHz帯無線システムの通信性能を 向上させ自動運転応用への可能性を検討する。 通信方式の研究で連携 電気通信大 2 パナソニック 760MHz無線システムを利用した 先読み情報の自動運転サービスへの 応用検討と検証を行う。 先読み情報の取扱いの研究で連携 パイオニア 複雑な道路形状走行時に自車の 位置情報に関する課題を明確化し 必要情報を活用する手法を開発する。 高信頼・低遅延車車間通信を実現する 技術を開発する。 想定するユースケース 高速道の合流走行 車線変更 分担 通信の研究開発 サービス/アプリケーション の研究開発 デンソー 760MHz無線システムT-109の拡張 新通信方式 先読み情報の活用 位置情報の利用性向上 8 複雑な道路形状 パナソニック パイオニア 電気通信大 333 課題Ⅱ 研究実施主体間の関係 NTTドコモ KDDI総研 【連携イメージ】 BLEビーコンで測位した情報を700MHzで直接通信すること や、携帯電話NW利用型に比べどの程度低遅延か比較する ことを想定。 Web IF, 標準化 プローブデータ収集配信 プライバシー保護技術 Web IF 支援対象:歩行者, 車, etc. パナソニック/ PSNRD 路側装置 (BLEビーコン) 携帯電話ネットワーク 700MHz直接通信 交差点エリア内でのBLEビーコンを 利用した位置測位 歩行者の位置測位 支援対象:歩行者×車 位置測位 歩行者と車の衝突予測 パナソニック NTTドコモ 絶対測位 GPS,QZSS, マルチパス誤差対策 GPS 相対測位 歩行者自律航法 マップマッチング BLE,PDR, 指向性アンテナ※ ※PDR,指向性アンテナ採用については現在検討中 支援対象:歩行者 衝突予測 利用情報 9 パナソニック NTTドコモ 相互の位置、 速度、方向 (衝突予測無) <課題Ⅰ>本年度の成果を用いた実用化イメージ 自動走行システムに用いる通信の研究 自動走行システムに用いる先読み情報の研究 本年度 自動走行用の通信性能の検討 本年度 (デンソーの研究) ・現行通信方式の課題を明確化する 分散協調 ITS通信技術開発 4 (電通大の研究) ・自動走行用の新しい方式提案をする 現行通信方式を高度化するための技術提案と開発 自動走行システムへの通信情報の活用検討 (パナソニックの研究) ・先読み情報の活用シーン(UC)と活用モデルを提案する 普及車載機での評価や公共交通アプリへの有効性検証 (パイオニアの研究) ・複雑な道路環境下で車両を特定するための課題を明確化する GNSS 高度化地図と自律センサーが 協調するV2X装置の開発 Sensing Unit V2X Digital Map 通信の高度化で車両の制御にも余裕時間が創出される。 これにより、より円滑な合流支援が可能になったり デッドマンシステムとの協調で多重事故を防止できる。 通信の高度化で先読み情報の利用性が向上し余裕時間が 創出される。これにより自律センサー利用システムの性能向上 10 がよりいっそう図れ、自動走行システムの普及が加速される。 <課題Ⅱ>本年度の成果を用いた実用化イメージ① (1)-ウ. 歩車間通信の通信プロトコルの開発 (1)-イ. 高度位置精度技術の開発 (1)-エ. 実環境における実証及び課題の抽出 【研究実施主体:パナソニック(株)】 3mの測位誤差でも適切な注意喚起を実現 歩行者が携帯できるサイズで高精度測位を実現 歩端末側でも危険判定し、歩行者へ注意喚起 ①歩行者/自転車の位置特定技術 【研究実施主体:(株)パナソニックシステムネットワークス開発研究所】 適切なアンテナ設計とフィルタ適用により 歩行者端末とスマートフォンの近接使用が可能 スマートフォンでのエリア判定で700MHz帯通信が 必要な時のみ動作し低消費電力化する 開放地だけでなく、高層ビル街でも正確な測位が可能 歩行者端末 700MHz帯 通信機能 ②衝突予測による注意喚起 単路だけでなく 交差点(右折)でも判定可能 歩行者 自転車 建物等遮蔽物 スマートフォン 注意 喚起 700MHz帯通信 ON/OFF制御 GPS 危険判定アプリ セルラー アンテナ 見通し外検知 セルラー 機能 受信 送信 フィルタ 平成27年度 検証箇所 車(自動運転車を含む) ③衝突予測による注意喚起(車両適用) 700MHz帯 通信用アンテナ 11 5 <課題Ⅱ>本年度の成果を用いた実用化イメージ② (2)-イ-2. Web技術を活用した 情報収集・配信技術の開発 (2)-イ-1. 歩道・車道での 高精度歩車検知システムの実現 【研究実施主体:(株)NTTドコモ】 【研究実施主体:(株)KDDI総研】 歩行者等の交差点エリア内の位置情報を路側装 置に提供することにより、自動走行システムに貢献 する。 すべての道路の走行車両等からの次世代プローブ データの収集とこれらに基づく危険予知・注意喚起 情報の配信を早期に実現し、自動走行の普及のた めの共通基盤を構築する。 自動走行システムへの貢献 路側装置からの 歩行者位置情報通知 6 車両データ 路側装置 歩行者 データ ダイナミック マップ 同乗者データ BLE プライバシー 保護機能 運転・車両データ 携帯電話網 クラウド 歩行者等 BLE電界強度による 位置測位 道路・交通管理者 12 メーカーに依存しないメッセージ セットの共通化・標準化、共 有ポリシーに応じたデータの振 分けなど 自動車メーカ ・保険会社 <課題Ⅲ>本年度の成果を用いた実用化イメージ 7 79GHz帯ミリ波レーダーを用いた路側センサーは、自動走行車両の死角領域を補完する動的情報の 取得に活用するようにして、将来の展開性を確保しつつ実用化を加速する。 ・ 自動走行車の普及シナリオに沿って、前記走行車両の死角領域としては、一般道の交差点支援だけ でなく、高速道路の分合流点支援についても実用シーンに想定する。 ・ 79GHzレーダーの特長を活かし、分合流点や交差点に進入する複数の車両や歩行者、自転車の位置 や速度を高精度に測定して、動的情報データをリアルタイムに更新する。 また、ITS無線通信技術等を利用し、前記データを自動走行車両等へ高速伝送する。 ・ コスト競争力を確保するため、将来の海外展開も見据えた小型で汎用性の高いミリ波レーダーの性能 仕様を策定、訴求する。 ・ 2017年度のSIP全体実証実験に向けて、一般道路交差点支援、高速道路分合流支援のための無線 通信機能等の実装を行う。 一般道路 交差点支援 高速道路 分合流支援 走行・合流車両検知 簡易表示板 13 第26回、第27回、第28回の活動概要について 次世代都市交通WGの議論要旨 資料20-3-2-1 報告内容 第26回:警4、警5施策の受託者報告 第27回:交通制約者・歩行支援システム進捗報告 平成28年度施策提案 第28回:実証実験計画案について 平成27年度施策中間報告 ・警4施策(PTPSの高度化)について:重要交差点ではバスだけを 優先できない状況もあり、どこにPTPSを入れるかは検討課題。 東京臨海部を想定した具体的な検討を今後進める。 での主な議論 WG ・警5施策(PICSの高度化)について:歩行者端末としてスマホを 想定すると、まずパスコードを入れる必要があり、ワンプッシュ ではできない。 画像センサーで横断中の歩行者を認識する方式は、煩わしさ はないが、交通制約者か否かを判定するのは難しい。 ・歩行支援システムについて:データフォーマット等のオープン化 が必要。ハンディキャッパーだけを対象にすると市場が小さい。 ・平成28年度施策提案:成果の出口として、五輪もしくは東京都 だけでなく、東京以外の場所や海外も含めて計画を立てるべき。 情報センターは、車両情報を有効に活用して、インフラの管理 情報にも活用できるようにしてほしい。 ・平成27年度施策中間報告:PTPS車載器側での優先権調停は バスの交差点に対する相対的な位置関係の特定精度が課題。 混雑予測に関しては、交通系データだけでなく、SNS情報の活用 を考えるべき。五輪組織委の輸送グループの活動と重複しない ように調整が必要。 今後の進め方 ・平成27年度施策については、中間報告での指摘事項を踏まえて、 最終報告に反映する。 ・平成28年度施策と大規模実証実験計画についても、WGでの議論を 計画案に反映する。 14 資料20-3-2-2 「ART関係報告」について 次世代都市交通WGの議論要旨 報告内容 1.連節バスによる正着要件およびバスベイ形状に関する実験結果 2.ART向け技術の検討状況 3.正着制御法および評価実験の中間報告 での主な議論 WG 1.バスベイ形状について ・東京五輪向け路線の特異解にならないようにすべき。 全国展開を見据えて標準化できる解を見出したい。 ・正着については、ぜひ実現したい。全部のドアでなくても、 一か所だけでも価値はある。 ・バスベイの検討では、視覚障害者の歩行への支障について 考慮する必要がある。 2-1.車椅子スペースについて:車椅子利用者の使用性への配慮 も必要だが、一方で利用頻度から考えると一般席としての 利便性も考えたい。IT技術を駆使して両立するようにする。 2-2.CACCについて:前方走行車に速度ムラがあると影響が伝搬 してしまう。専用レーンを前提に考えたい。 3.正着評価実験について ・定量的な評価が出来てきたのはよいが、まだばらつきが大きい。 ・低速で進入した場合のほうが正着精度が悪いのは、適合が 不十分とも思えるが、制御理論上の問題がないかについても 要確認。 今後の進め方 ・具体的な検討が進んでいるが、すでに製品化に向けた仕様決定 段階にはいるものもあり、今後日程管理とコスト管理も必要になる。 ・一方で、2020年の五輪の出口だけにとらわれない研究開発も視野 に入れて進める。 15 0 資料20-3-2-3 正着実験風景 16 ৱમ ≤≵≷Ӽↀ২ᘐ↝౨᚛ཞඞ ․•‣‧࠰‣․உଐ ϋ᧚ࡅ⁅※⁂ᐯѣឥᘍ⇝⇟⇬∆ഏɭˊᣃࠊʩᡫ≺≪૰ ʙѦޅ 17 17 ং५ڷط57पి৷॑ਫ਼ୈরभ,76ૼ ႸਦẴۋίỶἳὊἊὸ ᾀώʙử᧸ẩẆܤμỆᡛ ⾪✺ᨾ䛾㜵Ṇ φ˳ሊ ᵆᾀᵇ ԗᡀὉϋऴإ੩̓ ᵆᾁᵇ ʙׅᢤὉᘮܹ᠉ถ ㌴ෆ㌿ಽᨾ䛾㜵Ṇ ᾁώẐᵏЎỉủờễẪẆ ẴẟẴẟểἢἋầឥỦẑ 䠄㏿㐩䞉ᐃᛶ䛾ྥୖ䠅 ᵆᵑᵇ ό๖ễьถᡮ ᵆᵒᵇ ̮ӭࢳẼỉஇ҄ݱ ᾋ࠼ᩓᤧίែ᩿ᩓὸỉ̊ᾍ 㐠㌿㛫 㝆㛫 ২ᘐ Ṟܤμऴإ੩̓ ᑐྥ┤㐍㌴䞉 Ṍ⾜⪅䛾 Ꮡᅾሗ Ṛゅ䞉ಙྕሗ䛾 ᥦ౪䛻䜘䜛 ᘔᆳʙỉ᧸ഥ ྑᢡὀព ṟ៊ỚểỄộụСࣂ ίᛚႆᡶ᧸ഥὸ ㏿ᗘ䝟䝍䞊䞁 Ṡᵣᵢᵱᵱ ί ῟ῷီࠝɲͣഥὸ ṢḚὺμᡮᵟᵡᵡ タᐃ䛥䜜䛯ᡮࡇἣἑὊὅ䛻 ᇶ䛵䛝䚸ό๖Ệьถᡮ ̮ӭࢳẼ᧓ ίӫ৵ૅੲὸ ί̮ӭᙸᓳểẲදॖὸ Ṣᐯѣьถᡮ 䞉㉮⾜㛫䛾ᵑᵒήầ̮ӭࢳẼ 2/18 ᵉ ṡᵮᵡᵱίᐯѣΌ ῝ῤὸ Ṣḛὺᵡᵟᵡᵡ ᵆῥ ῝Ὺῧ ῝ ὸ ๓᪉䛾ᨦܹཋ䠄ప㏿㉮⾜㻛 Ṇ㌴୧䠅ửἾὊἒỂ౨ჷ䚸 ό๖ỆถᡮὉϐьᡮ ᵉ ίᡫ̮Мဇῥ ῝Ὺῧ ᵋ ὸ ๓᪉㌴୧䛜㻯㻭㻯㻯ᦚ㍕䚸 ᧓ᡫ̮ờဇẟề䚸 ợụό๖ỆถᡮὉϐьᡮ 䞉⾲ᐃ㏿ᗘ䛿ᵏᵎᶉᶋᵍˌɦ 䜸䝣䝢䞊䜽 㝆㛫 㝆 㝆 㝆㛫 ṣᵮᵲᵮᵱίΟέ̮ӭὸ᭗ࡇ҄ὺ̮ӭऴإဇίႆᡶὉ̮᩷ӭᡫᢅૅੲὸ 䝢䞊䜽 ᵆᵓᵇ ʈᨀ᧓ỉჺ ᾂᵌ ẐᤧᢊỆ˚ẴỦٻᡛẑ 䠄㍺㏦䛾ຠ⋡䞉ᰂ㌾ᛶ䠅 ᚑ᮶䛾䝞䝇㏻䛷䛿ᅔ㞴䛺 ㍺㏦ຊ䛸㏿㐩䞉ᐃᛶ䛾୧❧ 㛫ᖏ䞉༊㛫䛻䜘䜚ኚື䛩䜛 ㍺㏦㟂せ䜈䛾 ᑐᛂ ᾃᵌ ẐʴỆởẰẲẟἢἼỴἧἼὊẑ ᵆᵔᵇᡲራἢἋὶ፭ឥᘍ 㟁Ἴ㏻ಙ䛻䜘䜚㐃⥆ⓗ䛻䝞䝇⨨䜢ᢕᥱ э 㐣㊊䛺䛟̮᩷ӭửࡨᧈ э ㌴ഃ䛻᩷സ᧓Ὁਖ਼ڜᡮࡇử੩̓ Ṥᵡᵟᵡᵡὺᵮᵲᵮᵱ 䠄㌴э㊰䠅䝞䝇ID䞉⨨䞉㏿ᗘሗⓎಙ 䠄㊰э㌴䠅㟷ṧ㛫䞉᥎ዡ㏿ᗘᥦ౪ ㌴⩌㉮⾜ᨭ䛻䜘䜚䚸PTPS䛻ᚲせ䛺㐠㌿㛫㝸䜢☜ಖ䛧䚸፭ҥˮỂ̮᩷ӭᡫᢅ ㌴⩌㉮⾜ᨭ ㌴⩌༢䛷䛾ಙྕ㏻㐣 㟂せኚື䜈䛾ᰂ㌾䛺ᑐᛂ ṥദბૅੲ ᵆᵕᵇẟẴỂờᐯщʈᨀ ㌴୧䛸䝩䞊䝮䛾 㝽㛫䞉ẁᕪ䛾ゎᾘ 18 18 䝪䝕䜱 2 䝩䞊䝮 䝞䝇䝩䞊䝮 䝍䜲䝲 䝩䞊䝮 3/18 ᳨ウ㡯┠ 䠍䠊ຍῶ㏿ᗘไᚚ 䠎䠊䝥䝷䝑䝖䝩䞊䝮ṇ╔ 䠏䠊ど⏺ᨭᢏ⾡ 䠐䠊ITSሗᥦ౪ 䠑䠊䝞䝸䜰䝣䝸䞊 19 19 資料20-3-3-1 国際連携WGでの議論要旨 SMC国際シンポジウム・サイエンスアゴラ結果および国際連携について 東京モーターショーSMC国際シンポジウム(11月6日)参加結果 ・ 葛巻PD代理が「SIPにおける自動運転への展望」と題して特別招待講 演を行った。また、天野国際連携WG主査が「自動運転が生み出す明 日の暮らしと社会」をテーマにパネルディスカッションのモデレーター を務めた。それらの概要を報告した。 説明概要 科学技術振興機構主催サイエンスアゴラ(11月15日)参加報告 ・ 社会受容性醸成のために、一般市民を対象としたセッション型企画 「自動走行技術が創る未来社会」を主催した。推進委員会・WG構成 員4名が講演を行った後、来場者との質疑応答を行った。 戦略的国際連携活動の進め方 ・ これまでに2回開催したSIP-adus Workshopなどの場を通じて、SIPadusの関係者と欧米のキーパーソンとの接点を作ることができた。 ・ 今後は、平成29年度の大規模実証実験に向けた活動の重点化に合 わせて、窓口を設定した国際連携の課題ごとにロードマップを作成し て、SIP-adusの成果を国際標準化活動などに戦略的に打ち出していく。 ・ 直近の活動機会として、1月にワシントンDCで開催される Transportation Research Boardの年次総会と同期間中に開催される日 米欧の専門家会議EU-US-Japan Automation in Road Transportation Working Groupに参加する。 戦略的国際連携活動の進め方 WGでの主な議論 ・ 重点化した5テーマでは、活動内容およびマイルストーンを記載した 工程表を作成しており、これと連動した戦略的国際連携活動の具体 的計画を立案する。 ・ 標準化や基準作りを担っている関連国内組織との連携を強化し、成 果をタイムリーに国際的議論の場に提示できるようにする。 ・ 平成29年の実証実験よりも長期的な視点で将来技術を対象とした標 準化の動きもあるので、時間軸を長くとった国際活動も必要である。 20 ৱમ ᡓ␎ⓗᅜ㝿㐃ᦠάືཬ䜃 䝔䞊䝬ู❆ཱྀ䛻䛴䛔䛶 㻞㻜㻝㻡ᖺ㻝㻞᭶㻞㻞᪥ ≉ᐃ㠀Ⴀάືἲே 㻵㼀㻿㻌㻶㼍㼜㼍㼚 ⮬ື㐠㌿䝥䝻䝆䜵䜽䝖 ෆᮧᏕᙪ 21 ᚋ䛾ᅜ㝿㐃ᦠάື ⡿ᅜ䚸Ḣᕞ䛷䛾㆟䛻✚ᴟཧ⏬䛧䚸㻿㻵㻼㻙㼍㼐㼡㼟㻌㼃㼛㼞㼗㼟㼔㼛㼜ྵ䜑䛯 ᅜ㝿㐃ᦠάື䜢᥎㐍䛩䜛 㻞㻜㻝㻢㻌 㻵㼀㻿㻌㼃㻯 㻹㼑㼘㼎㼛㼡㼞㼚㼑 㻝㻜㻛㻝㻜䡚㻝㻠 㻵㼀㻿㻌㻱ᖺᗘ⥲ 㻢㻛㻢䡚㻥 㼀㼞㼍㼚㼟㼜㼛㼞㼠㻌㻾㼑㼟㼑㼍㼞㼏㼔㻌㻭㼞㼑㼚㼍㻌㻞㻜㻝㻢㻌 㻳㼘㼍㼟㼓㼛㼣㻘㻌㻿㼏㼛㼠㼘㼍㼚㼐 㻠㻛㻝㻤䡚㻞㻝 㼃㼍㼞㼟㼍㼣㻘㻌㻼㼛㼘㼍㼚㼐 㻳㼞㼍㼚㼐㻌㻯㼛㼛㼜㼑㼞㼍㼠㼕㼢㼑㻌㻰㼞㼕㼢㼕㼚㼓㻌㻯㼔㼍㼘㼘㼑㼚㼓㼑㻌 㻡㻛㻞㻤䡚㻞㻥 㻴㼑㼘㼙㼛㼚㼐㻌㻺㼑㼠㼔㼑㼞㼘㼍㼚㼐㼟 ⡿ᅜ䛿ᖺ㻞ᅇ 㼀㻾㻮㻌㻝᭶䚸㻭㼂㻿㻣᭶ 㻵㼀㻿㻌㻭ᖺᗘ⥲ 㻢㻛㻝㻞䡚㻝㻡 㻿㼍㼚㻌㻶㼛㼟㼑㻘㻌㻯㻭 㼀㻾㻮 㻝㻛㻝㻝㻌䡚㻝㻠 㼀㻾㻮 㻭㼂㻿㻏㻡 㻣᭶ 㻝㻛㻥㻌䡚㻝㻞 㼃㼛㼞㼗㼟㼔㼛㼜 㼀㼛㼗㼥㼛 㻝㻝㻛㻝㻡䡚㻝㻣 22 22 Ḣᕞᆅ༊䛷䛾㆟ 䛿せ䜲䝧䞁䝖䛸䛾 ేタ䜢᳨ウ୰ ᪥ᮏ䛿 㻿㻵㻼㻙㼍㼐㼡㼟㻌㼃㼛㼞㼗㼟㼔㼛㼜 㻝 ㄢ㢟❆ཱྀ 䛆㻰㼥㼚㼍㼙㼕㼏㻌㻹㼍㼜䛇 ⓑ㲍Ⰻኴ㻔㻾㼥㼛㼠㼍㻌㻿㼔㼕㼞㼍㼠㼛㻌㻕 ᪥⏘⮬ື㌴䝰䝡䝸䝔䜱䞉䝃䞊䝡䝇◊✲ᡤ ௵◊✲ဨ 䛆㻯㼛㼚㼚㼑㼏㼠㼑㼐㻌㼂㼑㼔㼕㼏㼘㼑㼟䛇 ᑠᕝ ᩥ㻔㻺㼛㼞㼕㼒㼡㼙㼕㻌㻻㻳㻭㼃㻭㻕㻌 䝬䝒䝎ᰴᘧ♫ 㻾㻒㻰ᢏ⾡⟶⌮ᮏ㒊㛤Ⓨㄪᰝ㒊 ᖿ 䛆㻴㼡㼙㼍㼚㻌㻲㼍㼏㼠㼛㼞㼟䛇 ᓮᬛஅ㻔㻿㼍㼠㼛㼟㼔㼕㻌㻷㼕㼠㼍㼦㼍㼗㼕㻕㻌 ᅜ❧◊✲㛤Ⓨἲே ⏘ᴗᢏ⾡⥲ྜ◊✲ᡤ ⮬ື㌴䝠䝳䞊䝬䞁䝣䜯䜽䝍䞊◊✲䝉䞁䝍䞊 ◊✲䝉䞁䝍䞊㛗 䛆㻵㼙㼜㼍㼏㼠㻌㻭㼟㼟㼑㼟㼟㼙㼑㼚㼠䛇 ෆ⏣ಙ⾜㻔㻺㼛㼎㼡㼥㼡㼗㼕㻌㼁㼏㼔㼕㼐㼍㻕 ୍⯡㈈ᅋἲே᪥ᮏ⮬ື㌴◊✲ᡤ Ᏻ◊✲㒊Ᏻᇶ┙䜾䝹䞊䝥 䜾䝹䞊䝥㛗 䛆㻺㼑㼤㼠㻌㼓㼑㼚㼑㼞㼍㼠㼕㼛㼚㻌㼀㼞㼍㼚㼟㼜㼛㼞㼠䛇 ᕝᮏ㞞அ㻔㻹㼍㼟㼍㼥㼡㼗㼕㻌㻷㼍㼣㼍㼙㼛㼠㼛㻕㻌 ⟃ἼᏛ ᩍᤵ 䛆㻿㼑㼏㼡㼞㼕㼠㼥䛇 ㇂ཱྀ ぬ㻔㻿㼍㼠㼛㼞㼡㻌㼀㼍㼚㼕㼓㼡㼏㼔㼕㻕 䝖䝶䝍㻵㼀㛤Ⓨ䝉䞁䝍䞊 ௦⾲ྲྀ⥾ᙺ♫㛗 ᚋ❆ཱྀタᐃ䛜ᐃ䛥䜜䜛䝔䞊䝬 ¾ 㻾㼛㼍㼐㼣㼛㼞㼠㼔㼕㼚㼑㼟㼟㻌㼀㼑㼟㼠㼕㼚㼓 23 2 ⮬ື㐠㌿せ㛵ᚰ䛻ᑐ䛩䜛ᑐᛂ≧ἣ 㛵ᚰ Ḣᕞ ⡿ᅜ ᪥ᮏ䛾ᑐᛂ ᐇ⏝䛻ྥ䛡䛯㐍䜑᪉ 䕿 ᑐᛂせ㆟ㄽ ἲᚊ䛾ᚲせᛶ 䕿 䕿 ᑐᛂせ㆟ㄽ 㻾㼛㼍㼐㼣㼛㼞㼠㼔㼕㼚㼑㼟㼟㻌㼀㼑㼟㼠㼕㼚㼓 䕿 䕿 ᑐᛂ‽ഛ୰ ᥋⥆ᛶ 䕿 䕿 㻿㻵㻼㻙㼍㼐㼡㼟 㻯㻙㻵㼀㻿 䝕䝆䝍䝹䜲䞁䝣䝷䝇䝖䝷䜽䝏䝱 䕿 䕿 㻿㻵㻼㻙㼍㼐㼡㼟 䝎䜲䝘䝭䝑䜽䝬䝑䝥 䝠䝳䞊䝬䞁䝣䜯䜽䝍䞊 䕿 䕿 㻿㻵㻼㻙㼍㼐㼡㼟 㻴㻹㻵 ຠᯝホ౯ 䕿 䕿 㻿㻵㻼㻙㼍㼐㼡㼟㻌㻵㼙㼜㼍㼏㼠㻌㻭㼟㼟㼑㼟㼟㼙㼑㼚㼠 ಙ㢗ᛶ 䕿 䕿 ྛ♫ 䝃䜲䝞䞊䝉䜻䝳䝸䝔䜱 䕿 䕿 㻿㻵㻼㻙㼍㼐㼡㼟 䝉䜻䝳䝸䝔䜱 ᶵ⬟Ᏻ䚸㟁Ꮚ䝁䞁䝖䝻䞊䝹 䝅䝇䝔䝮 䕿 䚽 㻺㻴㼀㻿㻭 ྛ♫ 䝫䝸䝅䞊 䕿 ᑐᛂせ㆟ㄽ ᇶ‽䛾ㄪ 䚽 ྛ❆ཱྀ䜘䜚䜰䜽䝅䝵䞁 䚽 㻿㻵㻼㻙㼍㼐㼡㼟㻌ḟୡ௦㒔ᕷ㏻ 䜰䜽䝉䝅䝡䝸䝔䜱 䚽 ㉥Ꮠ䛿㻟ᴟ㆟㆟㢟 24 3 ཧ⪃㈨ᩱ 2015/04/15 ⮬ື㐠㌿ᢏ⾡䛾ᇶ‽䞉ᶆ‽᳨ウయไ ᅜ㐃つ๎ 㻳㻾㻾㻲 㻲 䞉䞉䞉 㻾㻣㻥ᨵᐃ ᐃ ᅜ┬㻔⮬㻕 ᅜ┬㻔㐨㻕 ㆙ᐹᗇ ⥲ົ┬ ෆ㛶ᗓ ෆ㛶ᐁᡣ ⤒⏘┬ ᅜ⥲◊ 㼃㻼㻝 㼃㻼㻞㻥 ㆟㛗䠖㻲㼞㼛㼟㼠䠄㼁㻷䠅 㛗䠖㻲㼞㼛㼟㼠䠄㼁㻷䠅 ஂಖ⏣䠄ᅜ┬䠅䚸 ሷぢ䠄䝖䝶䝍䠅 ᪥ᮏ 㼁㻺 㻭㻿㻱㻯㻭㻼㻌㻦㻌㻱㼡㼞㼛㼜㼑㼍㼚㻌㻭㼟㼟㼛㼏㼕㼍㼠㼕㼛㼚㻌㼛㼒㻌㼀㼛㼘㼘㼑㼐㻌㻹㼛㼠㼛㼞㼣㼍㼥㼟㻘㻌㻮㼞㼕㼐㼓㼑㼟㻌㼍㼚㼐㻌㼀㼡㼚㼚㼑㼘㻌㻯㼛㼚㼏㼑㼟㼟㼕㼛㼚㼍㼕㼞㼑㼟 㻭㻯㻱㻭㻌㻌㻌㻌㻌㻦㻌㻱㼡㼞㼛㼜㼑㼍㼚㻌㻭㼡㼠㼛㼙㼛㼎㼕㼘㼑㻌㻹㼍㼚㼡㼒㼍㼏㼠㼡㼞㼑㼞㻓㼟㻌㻭㼟㼟㼛㼏㼕㼍㼠㼕㼛㼚 㻭㻾㼀 䠖㼀㼞㼕㼘㼍㼠㼑㼞㼍㼘㻌㻭㼡㼠㼛㼙㼍㼠㼕㼛㼚㻌㼕㼚㻌㻾㼛㼍㼐㻌㼀㼞㼍㼚㼟㼜㼛㼞㼠㼍㼠㼕㼛㼚㻌㼃㼛㼞㼗㼕㼚㼓㻌㻳㼞㼛㼡㼜 㻶㻭㻿㻵㻯 䡯䡤䡬䢙༠ᐃᨵᐃ 㻵㼀㻿㻛㻭㻰㻙㻵㻳 㻵㼀㻿㻛㻭㻰㻙㻵㻳 ⮬ື㐠㌿ᐃ⩏ ༠ྠ㆟㛗䠖᩼⏣䠄ᅜ┬䠅䚸 ༠ྠ 㼅㼍㼞㼚㼛㼘㼐䠄㼁㻷䠅 䝅䝇䝔䝮ᐇ⏝ 㼃㻳 㻾㻣㻥㼃㻳 ᅜෆᑐᛂ㼃㻳 㻿㻵㻼 㮵㔝ᓥ䠄ᅜ⥲◊䠅 㻾㻣㻥㻳㻾㻾㻲ᑐᛂ ᰝ䠖ሷぢ䠄䢀䢒䡼䠅 ஂಖ⏣䠄ᅜ┬䠅 ḟୡ௦㏻ 㼃㻳 ᅜ㝿㐃ᦠ 㼃㻳 ⮬ᢏ 㻵㻿㻻 㻵㻿㻻 ⮬ᕤ 㻵㼀㻿ᶆ‽ጤဨ ⮬ື㐠㌿᳨ウ 㻻㻵㻯㻭 ⮬ື㐠㌿ᐃ⩏䚸㈐௵༊ศ䚸 ᑐእ❆ཱྀ 㻵㼀㻿䡿䢚䡬䡼䢉䢚䡬䡹 ᢏ⾡ศ⛉ ㉮⾜ไᚚศ⛉ 㼀㻯㻞㻜㻠㻛㼃㻳㻟ᑐᛂ ศ⛉㛗䠖୕ゅ䠄䢋䡾䡼䢚䠅 ⸨⏣䠄䢀䢒䡼䠅䚸▼⏣䠄䢊䢙䡼䢚䠅䚸 ಖᆏ䠄㻴㻵㻰㻻䠅䚸ᓊᮏ䠄ఫ㟁䠅䚸 ୰ᮧ䠄䡭䡮䡸䢙䠅 ົᒁ䠖㓇䠄⮬ᢏ䠅 㼀㻯㻞㻜㻠㻛㼃㻳㻝㻠ᑐᛂ ᰝ䠖ᶓᒣ䠄䢊䢙䡼䢚䠅 䠖㏆⸨䠄᪥⏘䠅䚸⸨⏣䠄䢀䢒䡼䠅 ⮬ື㐠㌿㼀㻲 ⮬ື㐠㌿ᐃ⩏ ㆟㛗䠖㻮㼑㼞㼑㼏㼦㼗㼕䠄㻭㼡㼐㼕䠅 ᑠ㧗䠄䝩䞁䝎䠅 Ᏻ㒊 䡰䢖䡴䢀䢗䢂䡴䡹㒊 ⮬ື㐠㌿ᐃ⩏ ᶵ⬟Ᏻ䚸䡺䡳䡩䢔䡿䡤 㒊㛗䠖㧗ᶫ䠄᪥⏘䠅 ᑠ㧗䠄䢊䢙䡼䢚䠅 㻵㼀㻿ᢏ⾡㒊 つ᱁ጤဨ 㼀㻯㻞㻞㻛㻿㻯㻟㻥㻌 㼃㻳㻤 㼀㻯㻞㻜㻠 ே㛫ᕤᏛ㒊 㼀㻯㻞㻜㻠㻛㼃㻳㻟 䢇䡩䡬䢋䢙䡮䢙䡼䡬䢈䡦䡬䡹 ศ⛉ 㼀㻯㻞㻜㻠㻛㼃㻳㻝㻠 ᆅᅗ䡿䢚䡬䡼䢉䢚䡬䡹 ㌴୧እ⏺ሗ䜢⏝䛔䜛㉮ ⾜ไᚚ䡸䡹䡿䢍 䡶䢙䢇䢚䡬䢁䠖ᰘ⏣䠄㻰㻾㻹䠅 㼀㻯㻞㻞㻛㻿㻯㻝㻟㻛㼃㻳㻤ᑐᛂ 㻴㻹㻵 ㆟㛗䠖䢆䡮䢙䢔䡫䢇䠄䡼䢚䡮䢍䢓䡬䠅 ᩧ⸨䠄䢀䢒䡼䠅䚸㉥ᯇ䠄⏘⥲◊䠅䚸 ᑠ㔝䠄㻶㻭㻾㻵䠅 䡶䢙䢇䢚䡬䢁䠖୕ゅ䠄䢋䡾䡼䢚䠅 ⮬ື㐠㌿ ⮬ື㐠㌿㼀㻾䢔䡬䡼䢚䡬䠖ಖᆏ䠄㻴㻵㻰㻻䠅 㻴㻹㻵㻙㼀㻲 䡰䡳䡹䢆䢛䡬䢀䠖⸨⏣䠄䢀䢒䡼䠅 ົᒁ䠖㓇䠄⮬ᢏ䠅 ඹྠ㆟㛗䠖㻮㼘㼍㼚㼏㼛 ศ⛉㛗䠖ᓊ䠄䢀䢒䡼䠅 ᖿ䠖ᰠཎ䠄䢀䢒䡼䠅 ᑠ㔝䚸㛗㇂ᕝ䠄㻶㻭㻾㻵䠅 䠄䢆䢚䡬䡸䢚䢂䡭ᕤ⛉䠅䚸 ᑠ㔝䠄㻶㻭㻾㻵䠅 㒊㛗䠖⸨ᕝ䠄䢀䢒䡼䠅 ᕝྡ䠄䢀䢒䡼䠅䚸㧗ᶫ䠄᪥⏘䠅 㻴㻹㻵ศ⛉ ⛣ືయ㏻ಙศ⛉ ศ⛉㛗䠖 ⸨ᮏ䠄᪥⏘䠅 ⋼婧㳣≽㣄妶㼃㻳 㻴㻹㻵 ศ⛉㛗䠖㜿㒊䠄䢊䢙䡼䢚䠅 䠖ᒣᮏ䠄᪥⏘䠅䚸ᰠཎ䠄䢀䢒䡼䠅 㼃㻳㛗䠖ୖ䠄䢊䢙䡼䢚䠅 Ḣᕞ 㼂㻰㻭 㻭㼡㼠㼛㼙㼍㼠㼑㼐㻌 㻰㼞㼕㼢㼕㼚㼓㻌㼃㻳 ⡿ᅜ 㻱㼁ྛᅜ 㻭㻯㻱㻭 㼀㼞㼕㼘㼍㼠㼑㼞㼍㼘 㻭㻾㼀㻌㼃㻳 㻱㻯㻌㻰㻳㻌 㻯㻻㻺㻺㻱㻯㼀 䢔䡬䡼䢚䡬䠖㻮㼑㼞㼑㼏㼦㼗㼕䠄㻭㼡㼐㼕䠅 㻿㼠㼍㼚㼐㼍㼞㼐㻌 㻴㼍㼞㼙㼛㼚㼕㼦㼍㼠㼕㼛㼚㻌 ㏻ಙ 㼕㻹㼛㼎㼕㼘㼕㼠㼥㻌 㻲㼛㼞㼡㼙 ㆟㛗䠖㻱㻯㻌㻰㻳㻌㻯㻻㻺㻺㻱㻯㼀 ㆟㛗䠖㻱㻾㼀㻵㻯㻻 㻭㻯㻱㻭 㻭㻿㻱㻯㻭㻼 㼂㻾㻭 㻱㻯㻌㻰㻳㻌 㻹㻻㼂㻱 䝁䞊䝕䜱䝛䞊䝍䞊䠖㻱㻾㼀㻵㻯㻻 䝁䞁䝋䞊䝅䜰䝮䠖㻱㼁ຍ┕㻥䛛ᅜ 㐠㍺ 㻭㼜㼜㼘㼡㼟 㻵㻰㻵㻭㻰㻭 㻱㻯㻌㻰㻳㻌 㻾㼀㻳 㻭㼡㼠㼛㼙㼍㼠㼕㼛㼚 㼃㻳 䝸䞊䝎䞊䠖㻭㼘㼢㼍㼞㼛㻌㻭㼞㼞㼡㼑 ඹྠ㆟㛗䠖㼀㻺㻻 ඹྠ㆟㛗䠖㼂㻻㻸㼂㻻 㻭㼐㼍㼜㼠㼕㼢㼑 㻵㼀㻿㻙㻶㻼㻻 㼁㻿㻰㻻㼀య⤫ᣓ 㻯㼔㼍㼕㼞㻌㻶㼍㼚㼑㻌㻸㼍㼜㼜㼕㼚 㻲㻴㼃㻭 㐨㊰䚸䜲䞁䝣䝷⏬ 㻺㻴㼀㻿㻭 ⮬ື㐠㌿䢖䢉䢚䢕ᐃ⩏ 䠄㻸㼢㻜㻙㻸㼢㻠䠅 㻯㻭㻹㻼 㻿㼡㼑㻌㻮㼍㼕㻌㻔㻴㻻㻺㻰㻭㻕㻌㻌 㻭㻭㻹 ⡿ᅜ⮬ື㌴ᕤᴗ 㻭㻭㻿㻴㼀㻻 㐨㊰䚸䜲䞁䝣䝷タ⨨ 㻿㻭㻱 㻻㼚㻙㻾㼛㼍㼐㻌㻭㼡㼠㼛㼙㼍㼠㼑㼐㻌 㼂㼑㼔㼕㼏㼘㼑㻌㻿㼠㼍㼚㼐㼍㼞㼐㼟㻌 㻯㼛㼙㼙㼕㼠㼠㼑㼑 ⮬ື㐠㌿䢖䢉䢚䢕ᐃ⩏䠄㻸㼢㻜㻙㻸㼢㻡䠅 ◊✲㛤Ⓨ 㻲㼀㻭 බඹ㏻ 䝸䞊䝎䞊䠖㻭㼞㼕㼍㻌㻱㼠㼑㼙㼍㼚㼐㻘㻌䠲䠳 25 4 㻱㻺㻰 26 5 資料20-3-3-3 TRB Annual Meeting 2016 参加報告(速報) TRB: Transportation Research Board 2016年1月21日 国際連携WG 主査 天野 肇 TRB Annual Meeting 2016 の概要 • Transportation Research Board は、米国連邦政府への科学技術に関する諮問 機関 National Research Council の6つの部門のひとつ。運輸分野の領域横断 の発展のための研究開発の要として、連邦運輸省および各州運輸局の支援のも とで活動。 • 自動車交通、鉄道、海上輸送、航空輸送、旅客および貨物、建設および保守、運 用など輸送に関するあらゆる分野を包含。 • 毎年、1月上旬に年次総会をワシントンDCで開催。この分野の世界最大の会議。 • 今年は、1月1日-14日に開催。米国内に加え世界各国から約13,000人が参加、 約1,200のセッションで議論を行った。 • SIP-adusの中核技術に関して、欧米の関係者と課題別会議も実施。 27 1 自動走行に関連した主なテーマ 自動走行の環境整備 • Digital Infrastructure • 車両・システムの基準づくりと認証方法 • 公道走行を許容する制度設計 • 導入の社会的効果の評価 • 責任、倫理、など社会受容性醸成の課題 自動走行技術の応用 • 高速道路および都市内での事故削減 • トラックの隊列走行による安全性と効率の向上 • 自動走行車と公共交通の組み合わせ利用促進 • 協調型および自動走行による Smart City 構築 • 自動走行とシェアリングによる都市交通の革新 2 米国の実証実験 Connected Vehicle Pilot Deployment (協調型運転支援システム ) • New York ( タクシー、清掃車、バス、商用車など10,000台に搭載。 衝突防止、円滑化、歩行者保護、物流車両管理、信号制御高度化などを検証。) • Tampa, Florida ( 交差点衝突防止、逆走防止、歩行者事故防止、公共交通優先通行などを検証。) • I-80, Wyoming ( 約400マイルの幹線輸送路における悪天候下での安全走行支援を検証。) Smart City (交通を主眼にした都市の革新) • 一次審査: モデル都市を公募中。2月4日締め切り。 ( 5都市に絞り、$100,000の支援を受けて詳細提案を作成。) • 二次審査: 実施1都市を選定。 ( 連邦政府予算 $40 million + 民間支援 $10 Million + MobileEye機器 $6 million) 28 3 欧州の実証実験 欧州委員会: 7th Framework Programme • AdaptIVe およびCityMobil2を継続実施中。 欧州委員会: Horizon 2020 Smart, green and integrated transport / Automated Road Transport • 乗用車、トラック、公共交通の公道実証実験を公募。 • 2016年分: 審査中。2016秋に受託者との契約予定。 • 2017年分: 公募中。1st stage 1月20日締切 スウェーデン: Drive Sweden • Drive Me: 2017年に100台の自動走行車を一般市民に貸与し評価。 オランダ: Dutch Automated Vehicle Initiative (DAVI) • iGame: 通信利用自動運転の合流、信号なし交差点、緊急車両警報を テーマに5月28-29日にHelmondでコンペテイションを実施。 • European Platooning Challenge: スウェーデン、ドイツ、ベルギー、 スペインを出発した隊列走行トラックが4月6日にロッテルダムに到着。 • 欧州連合の2016年前半の議長国として、協調型自動運転をテーマとした 運輸閣僚会議を4月14日開催し、Amsterdam Declaration に調印予定。 4 課題別の専門家会議 TRB Annual Meetingに併催し、日米欧の課題別専門家会議を実施。 SIP-adusからは下記の課題別窓口が参加。詳細は、各WGで報告予定。 Dynamic Map 白𡈽良太 日産自動車モビリティ・サービス研究所 主任研究員 Connected Vehicles 小川伯文 マツダ株式会社 R&D技術管理本部開発調査部 主幹 Human Factors 北崎智之 国立研究開発法人 産業技術総合研究所 自動車ヒューマンファクター研究センター研究センター長 Impact Assessment 内田信行 一般財団法人日本自動車研究所 安全研究部安全基盤グループ グループ長 Next generation Transport 川本雅之 筑波大学 教授 Security 谷口覚 トヨタIT開発センター 代表取締役社長 29 5 参考資料1 自動走行システム推進委員会(第19回)議事要旨(案) 1.日 時 平成27年12月21日(月) 15:00~17:00 2.場 所 中央合同庁舎第4号館共用第 1 特別会議室 3.出席者: (敬称略) (議長)葛巻 清吾 有本 建男 朝倉 天野 稲垣 岩貞 片原 加藤 川本 教野 熊谷 清水 田中 永井 花井 福島 横山 康夫 肇 敏之 るみこ 尚俊 晋 雅之 秀樹 義彦 和夫 健一 正夫 利夫 正夫 利夫 市川 類 加藤 伸宏 中村 裕治 吉田 健一郎 河南 正幸 久保田 秀暢 PD代理 政策研究大学院大学 教授 兼 科学技術振興機構 研究開発戦略センター 上席フェロー 東京工業大学 大学院 理工学研究科 教授 ITS Japan専務理事 筑波大学 大学院 システム情報工学研究科 研究科長 自動車ジャーナリスト 電子情報技術産業協会 (富士通(株) マーケティング戦略室エキスパート&アドバイザー) 産業技術総合研究所知能システム研究部門研究グループ長 筑波大学 教授 日本自動車部品工業会 (住友電気工業(株) 主幹) スズキ株式会社 四輪技術本部 四輪安全・情報設計部 部長 自動車ジャーナリスト 電子情報技術産業協会 (三菱電機(株)開発本部 役員技監) 日本自動車研究所 代表理事・研究所長 (代理:小野古志郎) ITS Japan企画グループ グループ長 日産自動車株式会社 環境・安全技術渉外部技術顧問 株式会社本田技術研究所 四輪R&Dセンター上席研究員 (代理:鵜浦清純) 内閣官房 情報通信技術総合戦略室参事官 警察庁 長官官房参事官 総務省総合通信基盤局 新世代移動通信システム推進室室長 経済産業省製造産業局 電池・次世代技術ITS推進室室長 国土交通省道路局 道路交通管理課ITS推進室室長 国土交通省自動車局 技術政策課 国際業務室室長 オブザーバー 村山 隆 東京都青少年・治安対策本部治安対策担当部長 重要課題実証リーダー 鵜浦 清純 株式会社本田技術研究所 四輪R&Dセンター 主任研究員 金光 寛幸 トヨタ自動車株式会社 第1電子開発部 主査 白𡈽𡈽 良太 日産自動車株式会社 総合研究所 主任研究員 谷口 覚 株式会社トヨタ IT 開発センター 代表取締役社長 総合科学技術・イノベーション会議 久間 和生 総合科学技術イノベーション会議 常勤議員 事務局 松本 英三 内閣府 科学技術・イノベーション担当 審議官 森下 信 内閣府 科学技術・イノベーション担当 企画官 吉川 元淳 内閣府 科学技術・イノベーション担当 4.議題 8) 事務局報告等 (1) 各施策の進捗状況 (2) HMIタスクフォース構成員の追加について 30 (代理:松屋温美) (3) 2017 年度大規模実証実験企画タスクフォースの新設について 9) 平成 28 年度 研究開発計画(施策の方向性等)について (1) 平成 28 年度 研究開発計画策定の考え方 (2) システム実用化 WG(第 33 回・12/9)における議論 (3) 次世代都市交通 WG(第 27 回・12/9)における議論 (4) 2017 年度大規模実証実験における重要 5 課題への各実証テーマリーダー(民間)提案 ① ダイナミックマップ、 ② HMI、 ③ セキュリティ、 ④ 歩行者事故低減、 ⑤ 次世代都市交通 (5) 平成 28 年度施策 関係府省要望説明 ① 警察庁、② 総務省、③ 経済産業省、④ 国土交通省自動車局、⑤ 内閣府 (6) 平成 28 年度施策一覧 調整(案)について (7) 今後の検討スケジュールについて 10) PD 自己点検票について【報告】 11) その他 (1) 2015 年世界無線通信会議 (WRC-15)結果報告 (2) 米国 Transportation Research Board 年次総会への参加について 【配布資料】 資料8-1 資料8-2 資料8-3 資料9-1 資料9-2 資料9-3 資料9-4-1a 資料9-4-1b 資料9-4-2a 資料9-4-2b 資料9-4-3 資料9-4-4 資料9-4-5 資料9-5-1 資料9-5-2 資料9-5-3 資料9-5-4 資料9-5-5 資料9-6 資料9-7 資料10 資料11-1 資料11-2 施策進捗管理表 (151221 現在) SIP-HMI タスクフォースの設置_ver6.1 17 年度大規模実証企画 TF 設置 SIP 自動走行システム 16 年度研究開発計画 策定の考え方 システム実用化 WG における議論 次世代都市交通 WG における議論 【ダイナミックマップ】2016 年度以降計画 【ダイナミックマップ】集中施策案 【HMI】H28 年度施策 【HMI】課題と施策案 【情報セキュリティ】2016 年度研究方針 【歩行者事故低減】2016 年度計画案 【次世代都市交通】2016 年度以降 実施計画案 【警察庁】H28 年度事業計画案 【総務省】H28 年度実施計画案 【経産省】H28 年度 SIP 施策概要 【国交省】H28 年度事業イメージ(自動車局) 【内閣府】H28 年度 SIP 施策概要 SIP 自動走行システム 2016 年度施策一覧 今後のスケジュール プログラムディレクターによる自己点検 WRC-15 結果報告(ITS 関係) 米国 Transportation Research Board 年次総会資料 【参考資料】 参考資料3 自動走行システム推進委員会(第 18 回)議事要旨 31 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 【非公開資料】 5.議事要旨 1) 事務局報告等 (1) 各施策の進捗状況 資料 8-1 に基づき、事務局より進捗報告が行われた。 (2) HMI-TF 構成員の追加について 資料 8-2 に基づき、事務局より構成員追加について報告が行われた。 (3) 2017 年度大規模実証実験企画タスクフォースの新設について 資料8-3に基づき、事務局より、2017年度大規模実証実験企画タスクフォース(以下TF)の新設に ついて説明が行われ、続いて質疑が行われた。 2) 平成 28 年度 研究開発計画(施策の方向性等)について (1) 平成 28 年度 研究開発計画策定の考え方 資料9-1に基づき、2016年度研究開発計画策定の考え方について説明があった。 (2) システム実用化 WG(第 33 回・12/9)における議論 資料9-1の考えに基づきシステム実用化WG内での審議結果について、資料9-2を用いて説明が あった。 (3) 次世代都市交通 WG(第 27 回・12/9)における議論 同様に次世代都市交通WG内での審議結果について、資料9-3を用いて説明があ った。 (4) 2017 年度大規模実証実験における重要 5 課題への各実証テーマリーダー(民間)提案 大規模実証実験に向けて重要5課題のリーダから頂いた提案内容について説明が行われた。 [1] ダイナミックマップ … リーダより説明が行われた。 [2] HMI … リーダより説明が行われた。 [3] セキュリティ … リーダより説明が行われた。 [4] 歩行者事故低減 … リーダより説明が行われた。 [5] 次世代都市交通 … リーダより説明が行われた。 (5) 平成 28 年度施策 関係府省要望説明 平成28年度に向けて関係府省の施策提案内容について説明が行われた。 [1] 警察庁 … 資料9-5-1に基づき、説明が行われた。 [2] 総務省 … 資料9-5-2に基づき、説明が行われた。 [3] 経済産業省 … 資料9-5-3に基づき、説明が行われた。 [4] 国土交通省 自動車局 … 資料9-5-4に基づき、説明が行われた。 [5] 内閣府 … 資料9-5-5に基づき、説明が行われた。 (6) 平成 28 年度施策一覧 調整(案)について 資料9-6に基づき、来年度施策の一覧表について説明が行われた。 (7) 今後の検討スケジュールについて 資料9-7に基づき、来年度施策の確定に向けたスケジュールについて事務局より説明が行われた。 3) PD 自己点検票について【報告】 32 資料10に基づき、PDによる自己点検について事務局より説明が行われた。 4) その他 (1) 2015 年世界無線通信会議 (WRC-15)結果報告 資料11-1に基づき、世界無線通信会議結果報告について説明が行われた。 (2) 米国 Transportation Research Board(TRB)年次総会への参加について 資料11-2に基づき、TRB年次総会への対応について国際連携WG副主査より説明が行われた。 5) 久間議員コメント 会議の締めとして久間議員よりコメントがあった。 6.その他 次回は1/21(月)に開催を予定。 以上 33
© Copyright 2026 Paperzz