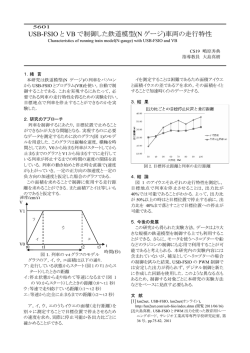
2010 年鶴岡高専ぷりん回路について 鶴岡高専 5 年 電気電子 菅埜諒介 1.概要 ・安価であること 高専ロボコンで使用する回路の仕様。 ・入手性のいい部品で構成されること ・DC モータの定格によらず使用できること 2.コンセプト ・実装面積が小さいかつ軽量であること モジュール化 ・プリント基板で作成可能で生産性に優れること 使いやすいインターフェース (基板加工機は高価なのでエッチングで作成する) 今年の回路はモジュール化に重点を置いた。例とし ・メンテナンス性に優れること て、回路をモジュールに分割する。1つ目はコントロ ・万が一に備え保護回路を内蔵していること ーラからの信号を受信する“制御モジュール” 。2つ ・駆動だけでなく制御も容易な仕様であること 目はメイン回路からの信号でモータを駆動させる“ド ライバモジュール” 。3つ目は電源を供給する“電源 4.作成する回路 モジュール” 。制御モジュールからの信号は RJ-45 コ 別紙参照。 ネクタと LAN ケーブルによってドライバモジュール へと伝送する。電源モジュールとドライバモジュール 5.作成手順および使用環境 とモータは端子台を用いて接続する。構成図を図 1 に 5.1 回路図に基づき回路をブレッドボード、ユニバー 示す。 サル基板に作成し、動作を確認する。 5.2 プリント基板のパターンを「PCBE」で作成する。 制御 RJ-45 ドライバ 端子台 電源 端 子 台 モータ 図 1 モジュール構成図 3.モジュール化の利点・欠点 利点 分業しやすく複数人での開発がしやすい 単体テストが行える メンテナンス性の向上 欠点 仕様の統一が困難 ブラックボックスになること 3.理想とするモータードライバ 1 モータドライバ モータドライバの回路図を図にしめす。 図 1 モータードライバ回路図(多少違います) 2 図 2 モータードライバパターン図 表 1 モータードライバ使用部品 購入先 コード 品名 個数単位 数量 単価 計 秋月 I-0000 RJ-45 コネクタ 1個 1 70 70 抵抗 1kΩ 6 積層セラミックコンデンサ 0.1μ 13 電解コンデンサ 50μ 2 IC ソケット 8 ピン 4 IC ソケット 14 ピン 3 赤色 LED 1 緑色 LED 1 ショットキダイオード 4 スペーサー 8 プラねじ 8 シリコンラバーシート 4 50m ファン 1 4069 2 PchFET 2 NchFET 2 TLP555 4 放熱板 4 共立 サージダイオード 1 サンハヤト ポジ感光基板 12K 1 エッチング液 1 現像剤 1 インクジェットフィルム 1 RS 000-0000 3 6-2 回路の説明 6-2-2 フォトカプラ TLP555 について 6-2-1 ロジック部について TLP555 の構成を以下の図 4 に示す。 図 3 ロジック部 表 2 ロジック部真理値表 図 4 TLP555 の構成(データシートより) DIR PWM Q1 Q2 0 0 1 1 0 1 0 1 フォトカプラとは内部の入力に発光ダイオードと出 1 0 1 1 力にフォトトランジスタを封入したものである。入力 1 1 1 0 と出力が電気的に分離できることから、電位が異なる 0 Pulse 0 1 Pulse 回路間の信号伝達に使われる。 図 4 より、IC 出力になっており高速に動作するこ 0 とができる。また、イネーブル端子を備えているが、 今回は使用しないので表 3 の真理値表に従って処理す 図 3 より、ロジック部は NAND ゲートで構成され る。 ている。 表 2 より、出力 Q1,Q2 は入力の PWM 信号を反転 表 3 TLP555 のイネーブル端子の真理値表 したものを Q1,Q2 のどちらに出力するかを DIR 信号 によって選択できる。このロジック部を通すことによ ってマイコンの PWM ピンを減らすことができる。同 時にブレーキ機能などを使うには複雑なロジックを 組まなければいけなくなる。詳しくは後で述べる。 出力 Q1,Q2 をフォトカプラの発光側のカソードに 接続することにより PWM 信号の duty 比が 100%の とき常時点灯することになる。 表 3 より、TLP555 を動作させるためにはイネーブ このような動作を基本とし、H ブリッジを駆動して ル端子には”ロー””L”を入力すればいいことが分かる。 モータを動作させる。 VCC,GND 間にバイパスコンデンサを接続せよ、と いう指示があるので、今回は 0.1μF の積層セラミッ クコンデンサを接続した。 また、TLP558 という出力がインバータのものをハ イサイド、つまり電源側の P チャネル駆動に用いれば 4069 の段を減らすことができる。しかし TLP558 は 入手性が悪いので TLP555 を使用する。 4 6-2-3 デッドタイム生成回路 6-2-4 ゲート抵抗 図 5 ハイサイド側デッドタイム生成回路 図 8 FET 駆動回路 ゲート抵抗の値は未定である。パルスの周波数や、 FET のゲート容量、基板パターンのインダクタンスな 図 6 ローサイド側デッドタイム生成回路 どの未定係数があるため選定できないからである。よ って、ゲート抵抗を可変することで、オーバーシュー ト、アンダーシュートしない最適な値を実験によって 見つけることにする。その値により未定係数を求め、 伝達係数や制動定数を算出することも視野に入れて いる。大きすぎると立ち上がりが鈍る。 6-2-5 フリーホイールダイオード、フライバックコン デンサ モータはインダクタンスを持つ負荷である。よって ON,OFF することにより逆起電力が発生する。また、 ロボットが慣性により動くことでモータが発電機と 図 7 ハーフブリッジ構成の FET なる。 図 8 のように、 発生した逆起電力を回生させるのが、 デッドタイムとは図 7 のように、FET をハーフブリ フリーホイールダイオード、もしくはフライバックダ ッジ構成にしたときにハイサイド側とローサイド側 イオードである。通常の整流用ダイオードでもいいが、 が同時に ON して、貫通電流が流れる(スルーシュー 逆回復時間の短いファストリカバリダイオードや、空 ト)を防止するためにある。 乏層容量の小さいショットキーバリアダイオードを コンデンサとダイオードを用いて波形を変化させ、 使用するのがよい。 高耐圧の NOT ゲート 4069 を用いて波形整形するこ しかし、電源に電流が回生してしまうのでバッテリ とにより、フォトカプラからの信号を変化させる。そ や電源を破壊する危険がある。それを防ぐために電源 れにより、ハイサイド側、ローサイド側の両方が OFF に並列に大容量の電解コンデンサを挿入する。高リプ になる時間(デッドタイム)を作る。デッドタイム生 ル対応のものが望ましい。周波数応答を改善するため 成後のパルスをゲートに入力し FET を動作させる。 に小容量の積層セラミックコンデンサも並列接続す ゲートにダンパ抵抗 Rg を挿入する。 る。 さらにサージダイオードを接続すれば、一定以上の 電圧を短絡させることもできる。 5 6-3 作成した回路 図 9 基板に実装した様子 図 10 ケースに収めた様子 図 11 モジュール 6 図 12 H8 3052 基板 図 13 H8 基板パターン図 図 14 有線コントローラ(オーディオジャック) (写真右) 7 6-5 考察 コネクタの RJ-45 と LAN ケーブルは抜け止めのツ メがあり、接触不良などのトラブルがかなり軽減でき る。 端子台は歩行の振動でも外れることが何度かあっ たので、こまめに点検するとよい。 ケースに収めることで切り子やビスによるショー トや、衝撃による破損から回路を保護できる。しかし、 大きさ、重さの点では課題が残る。 動作確認 LED を付けることでデバッグなどがやり やすい。故障の確認や、プログラムのテストなど多く の用途がある。 不良が出た場合はモジュールごと取り換えればい いので、テストランに支障を来さない。 冷却用ファンは微妙…なくてもよい。 6-7 改善点 PWM 周波数は 2kHz 程度が限界。ゲートドライバ を使うべし 関東ロボコン応援団?に呉高専 XBee くん開発のも のが非常に参考になります。 8
© Copyright 2026 Paperzz

![[release_SST-CPF05] 【 SilverStone 社 PWM のファンを減速させる](http://s3.paperzz.com/store/data/006271128_1-6322f84ab1a99f478d0cc4d5975f0547-250x500.png)