筑波大学大学院博士課程
システム情報工学研究科修士論文
プロジェクタ型複合現実感における
スクリーン物体追跡
永井悠文
(知能機能システム専攻)
指導教官 大田友一
2005 年 1 月
概要
近年,プロジェクタから現実世界へ CG などの仮想情報を直接投影することで,仮想世界
と現実世界の融合を図るプロジェクタ型複合現実感が提案されている.本論文では,プロジ
ェクタ型複合現実感において仮想情報の投影対象となるスクリーン物体の追跡を行うことを
目的とする.プロジェクタ型複合現実感においてスクリーン物体の動きに応じて投影画像の
更新を行うことができれば,インターフェース面など様々な部分でアプリケーションに広が
りを持たせることが可能となる.
本研究では,赤外線カメラのように特殊な機材は用いずに,プロジェクタ1台とカメラ1
台のみというシンプルな機器構成でスクリーン物体の追跡と仮想情報の投影を同時に行うこ
とを目指す.このシンプルな機器構成という枠組みの中で,本論文では2種類のスクリーン
物体追跡手法を提案する.
1つ目の手法は,スクリーン物体の底面に貼付したビジュアルマーカを利用し,高速な2
次元追跡を行う手法である.アクリル板の上にトレーシングペーパを敷いた机上作業空間を
用いることで,物体底面のビジュアルマーカを観察し,物体追跡を行う.スクリーン物体の
底面にビジュアルマーカを貼付すれば,物体が接地しているときはユーザにはビジュアルマ
ーカが見えず,マーカ自身が外観を損ねることはない.また,物体の底面にはプロジェクタ
光が照射されないのでマーカの認識にも悪影響を及ぼさない.構築したシステムでは,物体
が接地時に限定されるものの,ビデオレートで追跡できることを確認した.
2つ目の手法は,投影画像中へ埋め込んだパターンを利用し,3次元的な追跡を行う手法
である.sRGB 規格による表色系を用いることでカメラ観測色と心理物理色を比較し,カメ
ラで観測できる最低限の色差を確保しつつ,人間には見えづらい色差を求める手法について
述べる.この色差を用いてスクリーン物体追跡の手掛かりとなるパターンを投影画像に埋め
込むことにより,プロジェクタ1台に画像投影の役割だけでなく,物体追跡の役割を持たせ
る.構築したシステムでは,埋め込んだ色差が人間にとってはわずかな色差にしか感じない
ことを確認し,追跡に時間遅れはあるものの,3次元的な追跡ができることを確認した.
以上の2種類の追跡手法は,スクリーン物体の運動の自由度や,追跡速度が異なり,アプ
リケーションに応じて使い分けることができる.また,両者は異なる手掛かりを利用してい
るため,組み合わせて利用することで互いの欠点を補うことも可能である.いずれの手法も,
特殊な機材を利用しないことが大きな特徴であり,一般環境でプロジェクタ型複合現実感を
利用するための重要な技術であると考えられる.
目次
はじめに······························································································ 1
第1章
スクリーン物体の追跡············································································ 3
第2章
2.1
従来研究の問題点 ····················································································· 3
2.2
提案手法 ································································································· 4
第3章
3.1
3.2
3.3
3.4
物体底面のビジュアルマーカを利用した物体追跡 ······································· 6
システムの概要 ························································································ 6
キャリブレーション ·················································································· 7
物体位置の推定 ························································································ 8
実験 ····································································································· 10
第4章
4.1
4.2
4.3
4.4
投影画像へのパターン埋め込みによる物体追跡········································· 12
システムの概要 ······················································································ 12
投影画像へのパターン埋め込み ································································· 13
物体位置の推定 ······················································································ 18
実験 ····································································································· 21
第5章
まとめ······························································································· 27
謝辞
········································································································ 28
参考文献
········································································································ 29
本研究に関連する公表論文 ··················································································· 31
付録 A
3 章で用いた使用機器の仕様 ································································· 32
付録 B
4 章で用いた使用機器の仕様 ································································· 33
i
図目次
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
図
2-1
2-2
2-3
3-1
3-2
3-3
3-4
3-5
3-6
3-7
3-8
4-1
4-2
4-3
4-4
4-5
4-6
4-7
4-8
4-9
4-10
4-11
4-12
4-13
4-14
4-15
4-16
4-17
4-18
4-19
スクリーン物体追跡の2つのアイデア ···················································· 4
スクリーン物体底面のビジュアルマーカを利用する手法 ···························· 5
投影画像へパターン埋め込みを行う手法 ················································· 5
OTVM のシステム構成 ········································································ 7
ワールド座標系 ·················································································· 8
OTVM におけるキャリブレーション ······················································ 8
使用するビジュアルマーカ ··································································· 9
トレーシングペーパの下から観察したビジュアルマーカ ···························· 9
OTVM の機器構成 ············································································ 10
OTVM の処理の流れ ········································································· 11
白色立方体に木目調のパターンを投影した例 ········································· 11
パターン埋め込みの概念図 ································································· 12
カメラと人間の感度特性の違い ··························································· 13
投影色とカメラ観測色の対応付け ························································ 14
各色の相互変換 ················································································ 16
ポジ値とネガ値の算出方法 ································································· 17
ポジ値とネガ値の判定 ······································································· 18
ID スリット ····················································································· 19
シーンに投影された ID スリット(左)
,離散的コード画像(右)·············· 20
得られた疎な3次元形状 ···································································· 20
OTPE の処理の流れ ········································································ 22
実験環境························································································ 22
ID スリットを埋め込んだポジ画像をシーンに投影した結果··················· 23
抽出された ID スリット ··································································· 23
シーンに整合した画像を投影した結果 ················································ 23
元画像(左)
,ID スリットを埋め込んだ画像(右)······························· 24
元画像とポジ画像の評語による色差の評価画像 ···································· 24
スクリーン平面に投影する自然風景 ··················································· 25
虫眼鏡を模したスクリーン半球 ························································· 25
「虫探し」のスナップショット ························································· 26
ii
第1章
はじめに
近年,仮想情報をプロジェクタから現実世界に直接投影することで,仮想世界と現実世界
の融合を図るプロジェクタ型複合現実感という新しいスタイルの複合現実感技術が提案され
ている.
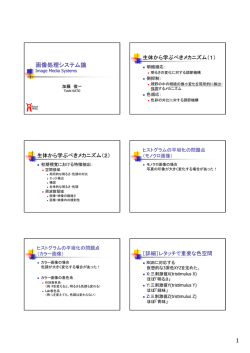
プロジェクタ型複合現実感は,3次元的に視覚情報を提示できる技術であり,そのリアリ
ティを向上させることを目的とした研究が数多くなされている[1][2].例えば,向川らは,プ
ロジェクタ型複合現実感におけるシーンの光学的な見え方の変化を取り扱い,白色石膏のシ
ーンにプロジェクタから画像を投影することで光源位置や反射特性を任意に変化させること
のできる仮想光学環境を提案し[3],その技術をディジタルアーカイブされた文化財の提示法
として応用した[4].
しかし,プロジェクタ型複合現実感はこのような3次元的な視覚情報提示技術としての魅
力だけではなく,以下のような利点から協調作業システムへの応用が期待できる.複数ユー
ザが仮想情報を取り扱う協調作業を考えた場合,そのシステムに求められるものは,
(a) 仮想情報のユーザ間での共有
(b) ユーザ間の円滑なコミュニケーション
(c) ユーザフレンドリなインターフェース
などが挙げられる.そして,これらの要項は,プロジェクタ型複合現実感技術を用いること
で満たすことが可能であると考えられる.
(a)の仮想情報のユーザ間での共有は,映画館やプレゼンテーションの場においてプロジェ
クタが使用されることからも分かる通り,プロジェクタ型複合現実感の得意とするところで
ある.プロジェクタは,仮想情報を現実世界に投影し,その情報を複数ユーザが直接目で見
るため,情報提示位置や情報内容に関してユーザ全員が同じ情報を共有することが容易に可
能である.また,(b)の協調作業におけるユーザ間の円滑なコミュニケーションというのも大
切な要素のひとつである.Head-Mounted Display (HMD)を用いた複合現実空間での協調作
業では,アイコンタクトなどの非言語情報の伝達が阻害され,ユーザ間の円滑なコミュニケ
ーションが困難になる.しかし,特別な機材の装着の必要がないプロジェクタ型複合現実感
では,互いの顔が直接見えるため,HMD を仮想的に消去するなどの特別な処理[5]を必要と
せずに,理想的なコミュニケーションが可能となる.
そして,インタラクティブ性が要求される協調作業システムにおいて最も重要なのが,(c)
のユーザフレンドリなユーザインターフェースである.協調作業システムにおけるユーザフ
1
レンドリなインターフェースを実現するためには,複数ユーザによる同時並行的な入力を自
然な形でサポートする必要がある.このように空間的に多重化された入力支援を行うインタ
ーフェースとしては,タンジブル・ユーザ・インターフェース(TUI)[6]が提唱されている.
TUI の大きな特徴は,入力空間と出力空間の一致である.プロジェクタ型複合現実感システ
ムにおけるスクリーンとなる完全拡散反射面を持つ3次元白色物体(以降「スクリーン物体」
と呼ぶ)を,表示デバイスとして用いると同時に,入力デバイスとしても用いることができ
れば,理想的な TUI を構築することが可能となり,プロジェクタ型複合現実感を協調作業シ
ステムへ応用するための基礎を固めることにもなる.しかし,そのためには,スクリーン物
体の追跡が必要となる.そこで本研究では,プロジェクタ型複合現実感におけるスクリーン
物体の追跡を目的とする.
本論文では,スクリーン物体追跡のために2つの手法を提案する.1つ目の手法は,スク
リーン物体の底面にビジュアルマーカを貼付し,そのビジュアルマーカを利用して物体の位
置姿勢を獲得する手法である.2つ目の手法は,カメラと人間の視覚の感度特性の違いを用
いて,3次元形状復元の手掛かりとなる情報を投影画像中の色空間へ埋め込み・抽出を行う
ことで,スクリーン物体の追跡を行う.本論文で提案する2つの手法の特徴は,可視光カメ
ラ1台と投影用のプロジェクタ1台のみというシンプルな機器構成で,スクリーン物体への
仮想情報の投影を行いつつ,スクリーン物体が追跡できる点にある.
以下,2章ではプロジェクタ型複合現実感におけるスクリーン物体追跡の従来研究につい
て触れ,その問題点から本研究の立場を明確にするとともに,提案手法の概要について触れ
る.提案手法は2つあり,3章ではスクリーン物体の裏面に貼付したビジュアルマーカを用
いて物体追跡を行う手法について説明する.4章では,もう一つの提案手法である投影画像
へパターン埋め込みによる物体追跡について説明する.そして,5章ではそれぞれの手法の
長短所についてまとめ,両手法の短所をそれぞれの手法を組み合わせることで解消可能であ
ることについて述べる.
2
第2章
スクリーン物体の追跡
本章では,従来行われてきたプロジェクタ型複合現実感におけるスクリーン物体追跡の関
連研究について紹介し,その問題点を示すとともに,本研究の目的である“スクリーン物体
の追跡”を行う際の基本方針について述べる.また,その基本方針に基づいた本論文の提案
手法の概要について説明する.
2.1
従来研究の問題点
プロジェクタ型複合現実感においてスクリーン物体の追跡を行うためには,シーンの変化
を何らかの方法で検知する必要がある.Bandyopadhyay ら[7]は,スクリーン物体の位置姿
勢を,スクリーン物体に取り付けた赤外線センサや磁気センサから獲得する“Dynamic
Shader Lamps”を提案している.このような受動的な情報を利用する手法の他には,アク
ティブビジョンと呼ばれるシステムの側からシーンに積極的に干渉して情報を獲得する能動
的な手法が考えられる.
白井ら[9]は,可視光と不可視光である赤外線光とを同時に投影するプロジェクタを“秘映
プロジェクタ”と呼び,秘匿情報を公共の場で共有する手段としてその有用性を確認してい
る.このシステムは,画像投影のためのプロジェクタの他に,赤外線フィルタを取り付けた
プロジェクタを別に用意し,可視光による投影画像に不可視光によるパターンを重ねて投影
したシーンを赤外線カメラで観察するという手法を用いている.この手法を応用して,物体
追跡の手掛かりとなるパターンを赤外線光を用いて不可視な情報としてシーンに投影を行う
手法も考えられる.
これに対し,アクティブビジョンを実現する際に,シーンに干渉する機材を別に用意する
のではなく,その機能を情報提示デバイスとしてのプロジェクタに付加する試みもなされて
いる.Cotting ら[8]は,DLP プロジェクタの DMD チップ素子のオン・オフが,任意色に対
して一意のパターンを持つことを利用して,任意のビットパターンが観測されるように色を
調整することで,投影とスクリーン物体の追跡を同時に行うシステムを提案した.しかし,
時間的に精密なハードウェア操作が要求されるこのシステムでは,プロジェクタとカメラの
動作を同期信号発生器とデジタルオシロスコープで制御している.
このように,従来の手法は,いずれも高価あるいは特殊な機材を必要とし,システムとし
ても大規模なものになってしまうという問題がある.そこで本研究では,シンプルな機器構
成でスクリーン物体を追跡できる手法を提案する.
3
2.2
提案手法
本論文では,シンプルな機器構成のシステムでスクリーン物体を追跡できる手法を提案す
る.シンプルな機器構成とは,通常のプロジェクタ1台とカメラ1台という構成を指す.
プロジェクタ型複合現実感において,カメラを用いた物体追跡を困難にしている要因は,
プロジェクタから画像が投影されていることである.一様でない画像がシーンに投影されて
いる場合,スクリーン物体を動かしたことにより,シーンの見え方がどの様に変わったかを
カメラ画像から推定するのは困難である.そこで,スクリーン物体の追跡手法として図 2-1
に示すような2つのアイデアを考えた.
(1) 画像が投影されていない場所を利用する
(2) 投影画像を利用する
(1)の画像が投影されていない場所を利用する方法としては,図 2-2 のようにビジュアルマ
ーカを物体底面に貼付することで具体化を試みた.ビジュアルマーカは高い検出精度と引き
換えに,マーカが環境の外観を損ねるという欠点がある.しかし,スクリーン物体の底面に
マーカを貼付すれば,物体が接地しているときはユーザにはマーカが見えず,外観を損なう
ことはない.また,物体の底面にはプロジェクタ光が照射されないのでマーカの認識にも悪
影響を及ぼさない.
(2)の投影画像を利用する方法は,図 2-3 に示すように人の目には認識しづらいがカメラか
らは認識が可能なパターンを投影画像に埋め込み物体追跡の手掛かりとすることで具体化を
試みた.人間の感覚特性とカメラの感度特性の違いを考慮して投影画像にパターン情報を埋
め込むことで,赤外線による不可視情報を用いるようなシステムと同等の効果を得られるこ
とが期待できる.
以下,物体底面のビジュアルマーカを利用する手法については3章で,投影画像にパター
ンを埋め込む手法については4章でそれぞれ詳しく述べる.
(2) 投影画像を利用
(1) 画像が投影されていない
場所を利用
図 2-1
スクリーン物体追跡の2つのアイデア
4
投影
透明
撮影
図 2-2
スクリーン物体底面のビジュアルマーカを利用する手法
投影
抽出
埋め込み
図 2-3
投影画像へパターン埋め込みを行う手法
5
第3章
物体底面のビジュアルマーカを利用した物体追跡
本章では,スクリーン物体の追跡のために,物体底面に貼付したビジュアルマーカを利用
する手法について述べる.
3.1
システムの概要
スクリーン物体底面のビジュアルマーカを用いた物体追跡システム(Object Tracker with
Visual Marker: OTVM)では,図 3-1 に示すように,透明なアクリル板上に複数のスクリ
ーン物体を置いたシーンにおける机上の協調作業を取り扱う.スクリーン物体は,あらかじ
め登録された物のみを取り扱い,その形状はあらかじめ計測しておく.スクリーン物体の仮
定として,白色の完全拡散反射面を持つものとする.平面下のカメラでスクリーン物体の位
置・回転角を検出し,それに応じて,上方のプロジェクタから画像を投影する.
スクリーン物体の位置・回転角の推定には,スクリーン物体の底面に貼付したビジュアル
マーカを用いる.下方に取り付けたカメラからビジュアルマーカを観察する.各スクリーン
物体にユニークなパターンのビジュアルマーカを貼付することにより,1台のカメラからの
観察だけで,どの物体が,どのような位置・回転角であるかを認識することができる.なお,
スクリーン物体を置く平面を透明なアクリル板にすると,プロジェクタの投影光が透過して
しまうため,カメラでマーカが観察できて,且つプロジェクタの投影光を拡散反射させるよ
うに,アクリル板の上にはトレーシングペーパを敷く.そのため,ビジュアルマーカがカメ
ラから認識できているときには,スクリーン物体は接地していると仮定する.
OTVM の特徴は,ビジュアルマーカを用いる際の問題点と,プロジェクタ型複合現実感に
おけるスクリーン物体追跡の問題点との双方を解決している点にある.ビジュアルマーカは
高い検出精度と引き換えに,マーカが環境の外観を損ねるという欠点がある.HMD を用い
る複合現実感では,ビジュアルマーカの上に CG を重畳することでこの問題を解決すること
ができるが,プロジェクタ型複合現実感ではそれは難しい.スクリーン物体の底面にマーカ
を貼付すれば,物体が接地しているときはユーザにはマーカが見えず,外観を損なうことは
ない.また,プロジェクタ型複合現実感におけるカメラを用いたスクリーン物体の追跡では,
プロジェクタから投影された画像によって,通常のコンピュータビジョン技術の適用が難し
いという側面があったが,OTVM では物体の底面にはプロジェクタ光が照射されないのでマ
ーカの認識にも悪影響を及ぼすことはない.
6
プロジェクタ
ビジュアルマーカを
貼付した白色物体
トレ ーシングペ ーパ
を敷いたアクリル板
カメラ
図 3-1
3.2
OTVM のシステム構成
キャリブレーション
OTVM で取り扱う座標系は,カメラ座標系・プロジェクタ座標系・ワールド座標系の3つ
であり,それぞれを次のように定義する.
x c = [x c , y c , 1]T
[
]
x p = x p , y p ,1 T
(3.1)
x w = [x w , y w , z w , 1]T
このとき,ワールド座標系の各座標は図 3-2 のようにアクリル板平面上が x w y w 平面とな
るようにし,この2次元座標を x w2 D とする. x w2 D は次式のように, z w = 0 となる平面であ
る.
x w 2 D = [x w y w 1] T
(3.2)
また,射影行列 H , P を次のように定義する.ここで s , t はスカラーである.
sx w2 D = Hxc
(3.3)
tx p = Px w
(3.4)
まず,これらの座標系間のキャリブレーションが必要である.キャリブレーションは図 3-3
に示すように,アクリル板の上にグリッド線を引いた紙を敷き,その上に形状が既知である
直方体の物体を重ねていくという手法を用いる.射影行列 P は,3次元点と2次元像の座標
の対応から求める[10].その際の,ワールド座標における3次元座標とプロジェクタ座標系
での2次元座標との対応付けは,プロジェクタから十字型のマウスカーソルを投影し,グリ
ッド線上でクリックすることにより手動で行う.射影行列 H は,平面上の点と平面上の点の
7
対応付けなのでホモグラフィ射影により求める[11][12].
以上のキャリブレーションの結果を用いれば,カメラで x c さえ求まれば,プロジェクタ座
標の x p が容易に算出できる.
zw
yw
xw
図 3-2
図 3-3
3.3
ワールド座標系
OTVM におけるキャリブレーション
物体位置の推定
OTVM では,アクリル板の上にはトレーシングペーパが敷かれているので,ビジュアルマ
ーカが認識できるのは物体が床に接地しているときのみである.つまり,物体の位置姿勢は,
マーカの x w y w 平面座標と, x w y w 平面における回転さえ分かれば一意に求めることができる.
ビジュアルマーカの位置とIDの認識には ARToolKit[13][14]を用いた.
本研究では図 3-4
に示すような,正方形の内部に任意のパターンを設定したビジュアルマーカを使用する.そ
8
して,テンプレートマッチングによってビジュアルマーカの ID の識別を行う.ここで,内
部パターンは任意であると前述したが,実際にはテンプレートマッチングを行う際に 90 度
ずつ回転させたパターンでマッチングを行うことでビジュアルマーカの回転角を獲得するた
めに,中心点に対して対称なパターンは避けるよう留意する必要がある.
図 3-5 は,トレーシングペーパを敷いたアクリル板越しにカメラから観察されるビジュア
ルマーカの様子である.このような画像から,投影画像を生成する手順を以下に説明する.
1.
ビジュアルマーカの4隅のカメラ座標 x c と,その物体がどの物体であるかを示すマー
カ内部のパターンの認識から ID を獲得する.
2.
ビジュアルマーカのカメラ座標 x c を射影行列 H を用いてワールド座標 x w に変換する.
3.
物体は接地していると仮定しているので,物体の位置姿勢が一意に求まる.
4.
ワールド座標系にあらかじめ登録しておいたスクリーン物体のモデルを用いてシーン
のモデルを構築する.
5.
シーンのモデルをワールド座標系からプロジェクタ座標系への射影行列 P を用いて,
レンダリングを行う.これは,プロジェクタをカメラと見なしたときに,ワールド座
標系のシーンの見え方を描画することに相当する.
図 3-4
図 3-5
使用するビジュアルマーカ
トレーシングペーパの下から観察したビジュアルマーカ
9
3.4
実験
プロジェクタは DLP プロジェクタ PLUS U4-136 を,カメラは USB カメラ Logicool
QV-4000 を,PC は PentiumIII 600MHz,ビデオカードに NVIDIA Quadro4 XGL を用い
て,図 3-6 のような配置で実験を行った.USB カメラで物体の底面画像をキャプチャし,
物体の位置・回転角を推定した後に,画像を生成・投影する一連の処理の流れを図 3-7 に,
各処理に要する時間を表 3-1 に示す.ビデオレートで処理が行えており,動的なシーンへの
対応が実現できた.図 3-8 は,白色立方体に木目調のパターンを投影した例である.
表 3-1
各処理に要する時間
処理内容
時間[msec]
物体位置・回転角推定
レンダリング
5.1
4.6
OTVM では,白色物体の底面にビジュアルマーカを貼付するだけで容易にスクリーン物体
を増やすことができる.また,位置・回転角の推定には USB カメラ1台のみを用いている
ので,安価にシステムを構築できる.しかし,床面への画像投影も考慮して,アクリル板の
上にトレーシングペーパが敷かれているため,物体が接地していないと物体の位置姿勢が分
からない.つまり,物体の3次元的な追跡ができないという問題がある.床面への投影は行
わず,スクリーン物体のみへの画像投影を行うようなアプリケーションならば,平面マーカ
を用いた物体の3次元的な位置追跡は可能である[13].しかし,多くのアプリケーションを
考えた場合,床面への画像投影は重要であると考えられる.
Projector:PLUS U4-136
PC:PentiumIII 600 MHz
USB Camera:Logicool QV-4000
図 3-6
OTVM の機器構成
10
Capturing image
Estimating position
Projection
Rendering
図 3-7
図 3-8
OTVM の処理の流れ
白色立方体に木目調のパターンを投影した例
11
第4章
投影画像へのパターン埋め込みによる物体追跡
本章では,スクリーン物体の追跡のために,投影画像へ物体追跡の手掛かりとなるパター
ンを埋め込む手法について述べる.
4.1
システムの概要
2.2 節でも述べたように,プロジェクタ型複合現実感システムにおいてカメラでのスクリ
ーン物体追跡を困難にしている要因は,シーンに投影されている画像である.しかし,図 4-1
に示すように,人間には見えづらくカメラからは認識が可能なように,スクリーン物体追跡
の手掛かりとなるパターンを投影画像中に埋め込み,カメラ画像から埋め込んだパターンの
抽出を行うことができれば,1台のプロジェクタから投影とスクリーン物体の追跡を同時に
行うことができる.つまり,ディスプレイデバイスとしてのプロジェクタを,シーン計測の
ための機器としても用いる.この投影画像へのパターン埋め込みを用いた物体追跡を行うシ
ステムを以降 OTPE(Object Tracker with Pattern Embedding)と呼ぶ.
OTPE を実現する際に問題となるのは,
“どのような埋め込み方”で“何を埋め込むのか”
という2点である.以降,4.2 節では,人の目には気づかれにくく,カメラでは認識が可能
なパターンの埋め込み方とはどのような埋め込み方かについて述べる.4.3 節では,動的な
シーンを解析するので,少数のフレームの情報からスクリーン物体の追跡を行わなければな
らないことを考慮し,どのようなパターンを埋め込むのかについて述べる.
埋め込み
抽出
カメラ
図 4-1
プロジェクタ
パターン埋め込みの概念図
12
4.2
投影画像へのパターン埋め込み
投影画像へのパターン埋め込みにおける着眼点は,カメラと人間の視覚の感度特性の違い
である.カメラと人間が同じ色差を観察した場合,図 4-2 のようにカメラの色感度特性上の
距離と人間の色感度特性上の距離は異なる.OTPE では,2枚の投影画像間に微小な色差を
付け,その色差の中にスクリーン物体追跡の手掛かりとなるパターンを埋め込む.その際に,
カメラと人間の感度特性を考慮することで,人間には見えづらく,カメラからは認識が可能
なパターンの埋め込みを実現し,不可視光を用いる手法と同等の効果をシンプルな機器構成
で実現する.
人間の色感度特性上の距離
カメラの色感度特性上の距離
図 4-2
カメラと人間の感度特性の違い
感度特性の違い
まず,プロジェクタから投影した色がカメラではどのように観測されるのか,また人間に
はどのように感じられるのかを定量的に表す.ある投影色 p をシーン中に投影したときに,
カメラ観測色 c と人間が感じる心理物理色 h は異なる.これが,カメラと人間の視覚の感度
特性の違いであり,このことを投影色 p のカメラ観測色 c への変換関数 C と,投影色 p の心
理物理色 h への変換関数 H を用いると,(4.1)式のように表すことができる.
c = C (p )
h = H (p )
(4.1)
投影色 p とカメラ観測色 c と心理物理色 h を定量的に取り扱うためには,これらの値を相
互に変換できなければならない.そのためには,投影色からカメラ観測色への変換関数 C ,
投影色から心理物理色への変換関数 H を求める必要がある.これらの変換関数を定めること
を,本論文ではカラーキャリブレーションと呼ぶ.
13
投影色からカメラ観測色への変換関数
投影色からカメラ観測色への変換関数 C は,主にプロジェクタの分光分布,スクリーン物
体の分光反射率,カメラの分光感度特性によって決まる.しかし,これらは個々の機器に依
存するため,一般的な定式化は困難である.
そこで本研究では,この C をルックアップテーブルを用いて実現する.プロジェクタの投
影色からカメラ観測色への対応付けは,図 4-3 のようにある輝度値の一様なパターンを白色
平面へ投影してカメラで撮影し,得られた画像の平均値を使用する.これを全ての投影色に
対して行うことで,投影色からカメラ観測色への完全なルックアップテーブルを得ることが
できる.
しかし,投影色とカメラ観測色は1対1に対応付いているわけではない.そのため, C の
逆関数である C −1 は,C の逆対応を取っただけでは不完全になってしまう.本研究では,C −1
において対応付けのない点は,最も近い対応付けを持つ組合せの観測値で補完することで完
全なルックアップテーブルを得る.
投影色
カメラ観測色
・・・
・・・
255, 153, 0
255, 120, 10
255, 153, 1
255, 120, 15
・・・
・・・
図 4-3
投影色とカメラ観測色の対応付け
投影色から心理物理色への変換関数
本研究では,心理物理色として代表的な均等知覚色空間である CIE 1976 (L*, a*,
b*)-Color Space(以降 L*a*b* 表色系と呼ぶ)を用いる.均等知覚色空間とは,2つの色刺
激の間で知覚される色差の大きさが等しければ,色空間におけるその2つの色刺激を表す2
点間の直線距離が色空間の位置に関わらずにほぼ一定であるような性質を備えた色空間であ
る.均等知覚色空間の中でも L*a*b* 表色系は,小色差の問題に応用されることから,本研
究のような微小な色差の定量化に向いているといえる[15].
L*a*b*値は,(4.2)式のように三刺激値である CIE XYZ 値で定量的に表されるため, H の
定式化を考える際には,ある入力輝度値に対するプロジェクタ光の分光分布を知る必要があ
る.しかし,分光分布の測定には特殊な機材が必要になるとともに,膨大な時間と労力を要
する.そこで本研究では,近年一般的になりつつある sRGB での出力が可能なプロジェクタ
を用いる.sRGB とは,IEC(International Electrotechnical Commission)で定められた
14
色空間の国際標準規格である.sRGB は異なる環境間で色の再現性を確保するために定めら
れた色空間であるため,XYZ 値との変換式が定義されている.これを利用し,分光分布の測
定を行うことなく,投影色の心理物理色への変換関数 H が求まる[16].sRGB から L*a*b*
値に変換するためには,(4.3)式で入力輝度値を 0 から 1 までの値に正規化し,ガンマ変換を
施し線形化した RGB 値を求める.このとき sR , sG , sB は 0 から 255 までの値をとる入力
輝度値である.(4.4)式から XYZ 値を求め,(4.2)式のようにして L*a*b*値を求める.このと
き, X n , Yn , Z n は完全拡散反射面の標準光による三刺激値であり,本研究では(4.2)式に示
すような値を用いている.
L* = 116(Y Yn )1 3 − 16
for Y Yn > 0.008856
L = 903.3(Y Yn )
otherwise
*
{
= 200{f (Y Y )
}
}
a * = 500 f ( X X n )1 3 − f (Y Yn )1 3
b*
n
13
− f (Z Z n )1 3
(4.2)
where
⎧⎪ f (t ) = t 1 3
for t > 0.00856
⎨
⎪⎩ f (t ) = 7.787 * t + 16 116 otherwise
X n = 98.072, Yn = 100, Z n = 118.225
R = (sR 255)2.2
G = (sG 255)2.2
(4.3)
B = (sB 255)2.2
X = 100(0.3933R + 0.3651G + 0.1903B )
Y = 100(0.2123R + 0.7010G + 0.0858B )
Z = 100(0.0182 R + 0.1117G + 0.9570 B )
(4.4)
色差へのパターン埋め込み
以上のようにして変換関数を求めることにより,図 4-4 のように投影色 p とカメラ観測色
c と心理物理色 h の相互変換が可能となる.これらの変換に基づいてカメラと人間の感度特
性の違いを利用し,2枚の画像間の色差に2値パターンの埋め込みを行う.本研究では,こ
の2枚の画像をポジ画像・ネガ画像と呼び,2値のことをポジ値・ネガ値と呼ぶ.ポジ画像
とネガ画像では,ポジ値とネガ値の関係が逆になっている.
ある投影色 p に対応するポジ値 p posi とネガ値 p nega ,心理物理色空間上でのポジ値とネガ
値の色差ベクトル ∆h ,カメラ観測色のポジ値とネガ値の色差ベクトル ∆c を次式のように定
15
める.
C
c
H
sRGB projection
C −1
p
図 4-4
h
H −1
各色の相互変換
p posi = p + ∆p posi
p nega = p + ∆p nega
(4.5)
∆h = h posi − h nega
( )
h nega = H (p nega )
where h posi = H p posi
(4.6)
∆c = c posi − c nega
( )
c nega = C (p nega )
where c posi = C p posi
(4.7)
この ∆p posi と ∆p nega を,人間に最も見えづらいように定める.つまり,心理物理色空間上で
の距離 ∆h が最小になるような ∆p posi と ∆p nega を求める.
しかし,埋め込んだパターンを安定に抽出するためには,カメラからは色差が常に識別可
能でなければならない.この要件を満たすため,カメラ観測色上でのポジ値とネガ値の色差
ベクトル ∆c を,以下の条件を満たすように定める.まず, c posi と c nega は,(4.1)式の c に関
して,(4.8)式の条件を満たすよう定める.
c posi + c nega
c=
2
(4.8)
(4.8)式は抽出の c を推定する際に用いる.これに関しては次節で述べる.また,観測色のポ
ジ値とネガ値において,確保されるべき距離を t とすると,∆c は(4.9)式を満たす必要がある.
∆c ≥ t
(4.9)
t は,スクリーン物体が3次元形状を持つことや,観測誤差があることを考えて,ある程度
の大きさを持たせることが望ましい.
上記式の意味は,図 4-5 に示すように,まずカメラ観測色空間上において投影色 p との対
応点を中心とした ∆c を直径とする球面上の2点を選択し,その2点を C −1 を用いて投影色
に逆変換する.次に,その2点を H を用いて心理物理色に変換し,(4.10)式を用いて距離 ∆h
を計算する.
16
(∆L ) + (∆a ) + (∆b )
* 2
∆h =
* 2
* 2
(4.10)
この計算を繰り返し, ∆h が最短となるようなポジ値とネガ値の組合せを見つける.全ての
投影色 p に対する p posi と p nega の計算を行い,ルックアップテーブルを作成しておく.
h posi
p posi
∆h
c posi
∆p posi
h
H
p
p nega
心理物理色
投影色
図 4-5
∆c
C
∆p nega
h nega
c
c nega
カメラ観測色
ポジ値とネガ値の算出方法
埋め込みパターンの抽出
次に,前節の方法で埋め込まれたパターンを,キャプチャしたポジ画像とネガ画像から抽
出する方法について述べる.
ポジ画像とネガ画像のある画素の実際の観測色をそれぞれ c1 ,c 2 とする.この2値から色
差を埋め込む前の投影色が推定できれば図 4-6 のように,その値のポジ値とネガ値を投影し
たときの観測色が推定でき, c1 , c 2 がポジ値であるかネガ値であるかの判別ができる.
まず,(4.8)式より c の推定値 ĉ は,
cˆ =
c1 + c 2
2
(4.11)
と求めることができる.ここで,投影色の推定値 p̂ は,
pˆ = C −1 (cˆ )
(4.12)
である.次に, p̂ に対応するポジ値 p̂ posi とネガ値 p̂ nega は前節で作成したルックアップテー
ブ ル よ り 既 知 で あ る た め , カ メ ラ 観 測 色 の 推 定 ポ ジ 値 ĉ posi と 推 定 ネ ガ 値 ĉ nega は ,
(
)
(
)
cˆ posi = C pˆ posi , cˆ nega = C pˆ nega より求まる.推定ポジ値 ĉ posi と推定ネガ値 ĉ nega の推定色差
ベクトル ∆ĉ を,
∆cˆ = cˆ posi − cˆ nega
17
(4.13)
とする.観測色の色差ベクトル ∆c ′ も同様に,
∆c ′ = c1 − c 2
(4.14)
と定義する.この画素点がポジ値であるかネガ値であるかの判別式は(4.15)式のようになる.
⎧ posi : ∆c ′ ⋅ ∆cˆ ≥ 0
⎨
⎩nega : ∆c ′ ⋅ ∆cˆ < 0
(4.15)
これは,実測値の色差ベクトル ∆c ′ と,推定値の埋め込み方におけるポジ方向への推定色差
ベクトル ∆ĉ との相関で判定していることに相当する.
p̂ posi
c1
ĉ posi
∆ĉ
∆c′
ĉ
p̂
ĉ nega
c2
p̂ nega
投影色
図 4-6
4.3
カメラ観測色
ポジ値とネガ値の判定
物体位置の推定
4.2 節の手法を用いることで,任意の2値パターンを2枚の画像間の色差に埋め込み,抽
出を行うことができる.本節では,スクリーン物体の追跡を行うためには具体的にどのよう
なパターンを埋め込めばよいかを検討する.
問題設定
OTPE では OTVM と同様に,スクリーン物体は白色の完全拡散反射面の剛体であると仮
定する.また,スクリーン物体の3次元形状はあらかじめ計測しておき,登録しておくもの
とする.シーンの3次元形状を復元し,あらかじめ登録しておいたスクリーン物体の3次元
形状と照合することで,スクリーン物体の位置・姿勢の推定を行う.
なお,本論文では問題の簡単化のために,スクリーン物体として半径が既知である半球を
用いる.この仮定により姿勢推定の計算を省き,位置推定問題のみを取り扱う.
18
疎な形状復元
プロジェクタからシーンに情報を投影し,カメラで撮影することによりシーンを解析する,
いわゆるアクティブビジョンは数多くの研究がなされており,中でも空間コード化光投影法
は基本的かつ有効な3次元復元方法である[17].空間コード化光投影法では,プロジェクタ
座標をカメラ座標と対応付けるために,プロジェクタ座標の分解能のビット数と同じフレー
ム数のパターンを投影する必要がある.本研究では,空間コード化光投影法を応用した疎な
3次元復元によって物体追跡を行う.
しかし,本研究のように動的なシーンを扱うためには,できるだけ少ないフレーム数の情
報からプロジェクタ座標が取得できることが望ましい.例えば,帯状の模様を等間隔に並べ,
その帯が左から何番目であるかを認識することができれば,帯の両端におけるプロジェクタ
座標が取得できる.そこで本研究では,図 4-7 のように等間隔に配置された帯に,その帯の
ID を示す0/1のビットパターンを付加したパターンを用いる.以降,このパターンを ID ス
リットと呼ぶ.図 4-8 左のように,シーンに ID スリットをプロジェクタから投影し,カメ
ラ画像を「0,1,帯以外」に3値化することで,離散的にカメラ座標とプロジェクタ座標
の対応を表した離散的コード画像を取得する.この0と1が,前節のポジ画像におけるポジ
値,ネガ値に相当する. ∆c ′ が閾値以下の場合には,帯以外と判定する.
また,床面のコード画像をあらかじめ獲得しておき背景コード画像とする.取得したシー
ンの離散的コード画像において,背景コード画像との差が閾値以下の場合は床面とみなし削
除しておくことで,図 4-8 右のようなスクリーン物体のみのコード画像を得ることができる.
このように獲得したコード画像と,あらかじめキャリブレーションで求めておいたプロジェ
クタとカメラの射影行列を用いることで,図 4-9 のようにスクリーン物体のみの疎な3次元
形状復元を行う.
ID: 0 1 2 3 4 5 6 7 8 ・・・・・
帯以外
帯
図 4-7
0
ID スリット
19
1
図 4-8
シーンに投影された ID スリット(左)
,離散的コード画像(右)
図 4-9
得られた疎な3次元形状
位置推定
スクリーン物体の位置は,得られた3次元形状と,あらかじめ登録しておいたスクリーン
物体の3次元形状を手掛かりに求める.しかし,得られた3次元形状は,コード画像生成時
の3値化誤りや ID スリットの誤読によって,大きな外れ値を含んでいる可能性がある.そ
こで本研究では,ロバスト推定法の一つである RANSAC を利用して位置を推定する.
以下に具体的な処理を述べる. k 回目のサンプリングにおいて, n 個の点群データから,
ランダムに3点を選択し,スクリーン球の半径 R が既知であることを利用して,その3点を
通る球の中心 o k を求める.復元された3次元形状の i 番目の点座標を q i とすると,o k から q i
までの距離は, rki = o k − q i と表すことができる.このとき,半径の許容誤差を m ,評価関
数 e(rki ) を,
20
⎧1 : R − rki ≤ m
e(rki ) = ⎨
⎩0 : otherwise
(4.16)
とすると,推定された球の中心の評価関数 S (k ) は,
S (k ) =
n
∑ e(rki )
(4.17)
i =1
となり, S (k ) が最大となる o k をスクリーン球の推定中心位置とする.
なお,スクリーン物体が球形状でない場合には,位置・姿勢推定の計算量が増加するが,
基本的には同じ枠組みで考えることができるため,一般形状のスクリーン物体の場合にも拡
張が可能である.
4.4
実験
処理の流れ
図 4-10 に OTPE の処理の流れを示す.スクリーン物体は常に動き続けているわけではな
いという仮定の下,スクリーン物体が動いていないときは同じ画像を投影し続ける.フレー
ム間差分をもとにシーンの変化を検出すると,投影画像に 3 次元形状復元の手掛かりとなる
ID スリットをポジ画像とネガ画像の色差に埋め込んで投影する.次に,カメラでシーンをキ
ャプチャして,埋め込んだ ID スリットを抽出する.そのようにして得られたパターンを元
に,疎な形状復元を行う.そして,あらかじめ登録しておいたスクリーン物体形状を手掛か
りに,スクリーン物体の位置姿勢を推定し,新しいシーンに対応した画像の生成・投影を繰
り返す.
実験結果
プロジェクタは EPSON EMP-74 を,カメラは SONY DFW-VL500 を,PC は Pentium4
2.53GHz を,ビデオカードに NVIDIA GeForceFX 5200 を用いて実験を行った.機材は図
4-11 のような配置である.図 4-12 のように,スクリーン物体が動かされてテクスチャの位
置がずれても,
人の目には見えにくいよう ID スリットが埋め込まれた画像を投影し,
図 4-13
のように抽出された ID スリット情報から3次元形状を復元する.そして,シーンの3次元
形状と球のモデルを照合し,球の位置を推定することで,図 4-14 のようにスクリーン物体
の位置を推定し適切な位置に描画を行うことができる.
また,ID スリットを投影画像中に埋め込んだことによる画質劣化の評価を行った.本研究
では,シーンに動きが検出されると投影画像に ID スリットを埋め込んだ画像を投影するが,
それまでは,通常の画像を投影している.そこで,通常の画像とポジ画像の各ピクセルの色
差の評価を行うことで,画質劣化の評価を行う.(4.10)式を用いて,通常の画像とポジ画像
の各ピクセルの L*a*b* 表色系での距離 ∆h を計算する.本研究で用いている L*a*b* 表色
系のユークリッド距離は NBS 単位であり,NBS 単位には表 4-1 に示すような“色差の程度
21
の評語”が定められている[15].この評語に沿ったカラーグラデーションを用いて,図 4-15
(左)の元画像と図 4-15(右)の ID スリットを埋め込んだポジ画像の色差を可視化した結
果を図 4-16 に示す.この図は,(4.9)式におけるカメラ観測色で確保されるべき距離 t を 10
としたときの結果であり,これは OTPE において安定に動作する色差距離である.情報を埋
め込んだ部分のみの NBS 単位での色差平均は 0.597 となっており,人間にはわずかにしか
知覚できない程度となっていることが分かる.
画像投影
物体追跡
No
Yes
フレーム間
変化あり
シーンの動きを監視
IDスリット埋め
込み・投影
キャプチャ・抽
出・ID解析
疎な形状復元
登録物体の形状
位置推定
投影画像更新
図 4-10
OTPE の処理の流れ
PC: Pentium4 2.53 GHz
IEEE1394 Camera: DFW-VL500
Projector: EMP-74
スクリーン物体
(半径既知の半球)
図 4-11 実験環境
22
スクリーン平面
図 4-12
ID スリットを埋め込んだポジ画像をシーンに投影した結果
図 4-13
図 4-14
抽出された ID スリット
シーンに整合した画像を投影した結果
23
表 4-1
NBS 単位における色差の程度の評語
色差の程度の評語
図 4-15
NBS 単位
差異なし
0
きわめてわずかに異なる
0 ~ 0.5
わずかに異なる
0.5 ~ 1.5
相当に異なる
1.5 ~ 3.0
著しく異なる
3.0 ~ 6.0
きわめて著しく異なる
6.0 ~ 12.0
別の色系統になる
12.0 以上
元画像(左)
,ID スリットを埋め込んだ画像(右)
別の色系統になる
極めて著しく異なる
著しく異なる
相当に異なる
わずかに異なる
きわめてわずかに異なる
差異なし
図 4-16
元画像とポジ画像の評語による色差の評価画像
24
応用システム
OTPE を用いた応用アプリケーション「虫探し」を構築した.
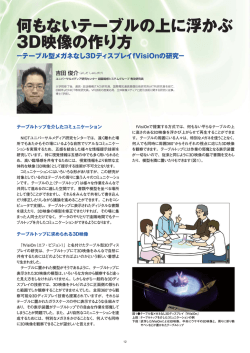
「虫探し」は,図 4-17 のよ
うなスクリーン平面に映し出されている自然風景の中から,擬態などで自然に溶け込んでい
る虫を探すインタラクティブ教育コンテンツである.図 4-18 に示すように,スクリーン半
球を虫眼鏡に見立てており,虫が隠れている場所にスクリーン半球をかざすと,虫の拡大画
像がスクリーン半球上に投影されるというアプリケーションである.
「虫探し」のスナップシ
ョットを図 4-19 に示す.このようなコンテンツは,一般的な PC 上でも実現可能ではある
が,通常のモニタとマウスオペレーションでこのようなアプリケーションを複数人が協調し
て行うのには限界がある.しかし,この「虫探し」はプロジェクタ型複合現実感の特徴を生
かしているため,多くの人が同時に複合現実空間を共有することができ,また,一つの机上
作業空間を取り囲んでの作業となるため,複数人のコミュニケーションが円滑に行うことが
できる.また,このことはユーザの目的意識の共有にも繋がり,教育コンテンツとして興味
を持ってもらうことに大いに役立つと思われる.
図 4-17
図 4-18
スクリーン平面に投影する自然風景
虫眼鏡を模したスクリーン半球
25
図 4-19
「虫探し」のスナップショット
26
第5章
まとめ
本論文では,プロジェクタ型複合現実感のためのスクリーン物体の追跡手法について述べ,
プロジェクタ1台,カメラ1台というシンプルな機器構成で,シーンへの投影とスクリーン
物体の追跡を同時に行う2つの手法を提案した.
スクリーン物体底面のビジュアルマーカを用いた物体追跡システム(Object Tracker with
Visual Marker: OTVM)は,スクリーン物体の底面にビジュアルマーカを取り付け,レンジ
ファインダなどで形状を計測するだけで扱う物体を登録することができるので,容易に対象
物体を増やすことができる.また,計算コストが低いので追跡が速く,追跡精度もよいが,
床面への投影が必要なアプリケーションではアクリル板の上にトレーシングペーパを敷くた
め接地時以外はマーカが認識できないので3次元的な追跡ができない.
一方,投影画像へのパターン埋め込みを用いた物体追跡を行うシステム(Object Tracker
with Pattern Embedding: OTPE)は,シーンの3次元形状を復元するため,3次元的な追
跡が可能である.しかし,そのぶん計算コストが高く,OTVM のようなリアルタイムでの追
跡は難しい.
以上の2種類の追跡手法は,スクリーン物体の運動の自由度や,追跡速度が異なり,アプ
リケーションに応じて使い分けることができる.また,両者は異なる手掛かりを利用してい
るため,組み合わせて利用することも可能であり,それぞれの欠点を互いに補うことも可能
である.例えば,スクリーン物体の接地時には OTVM の手法を用いて精度の高い追跡を行
う.そして,非接地時には OTPE の手法を用いて3次元的な追跡を行うが,その際に接地時
の情報を元に探索空間を狭めることで計算コストを抑えることができる.
今後の課題としては,実際に OTVM と OTPE を組み合わせたシステムを構築し,その有
効性を確認することが挙げられる.また,OTPE においてより複雑なスクリーン物体を扱え
るようにすること,処理速度の向上,画像の空間周波数を考慮して動的に埋め込むパターン
を生成することなども解決すべき重要な課題である.
27
謝辞
本論文の作成,ならびに本研究の進行に際し,常日頃から懇切丁寧なご指導を与えて下さ
った本学 システム情報工学研究科 大田友一 教授ならびに大阪大学 産業科学研究所 向川
康博 助教授に心より感謝の意を表します.特に,向川康博 助教授には筑波大学で講師をさ
れていた頃はもちろん,大阪大学に移られてからも変わらぬ丁寧なご指導を頂き,ここに改
めて感謝の意を述べさせて頂きます.また,日頃から数々の助言を与えて下さった亀田能成
助教授,掛谷英紀 講師,画像情報研究室の先輩方,同期の皆,そして後輩に深く感謝致しま
す.最後に,大学院への進学を勧め,経済的,精神的に支えてくれた家族に感謝します.
28
参考文献
[1] R.Raskar, G.Welch, K.Low and D.Bandyopadhyay, “Shader Lamps: Animating Real
Objects With Image-Based Illumination”, Proc. Eurographics Rendering Workshop
(ERGW2001), pp.89-102, 2001.
[2] Y.Mukaigawa, H.Nagai and Y.Ohta, " SpaceRelighter -Recording and Reproducing
Illumination in a Real Scene-", Proc. International Conference on Virtual Systems
and Multimedia (VSMM2004), pp.109-118, Nov. 2004.
[3] 向川康博,西山正志,尺長健,
“スクリーン物体への光学パターン投影による仮想光学環
境の実現”, 電子情報通信学会論文誌 D-II, Vol.J84-D-II, No.7, pp.1448-1455, Jul.2001.
[4] 向川康博,西山正志,尺長健,“仮想光学環境における実物体反射特性の学習”, 文化財
のデジタル保存 自動化手法開発プロジェクト平成 13 年度成果報告会, pp.75-85,
Mar.2002.
[5] M.Takemura and Y.Ohta, “Diminishing Head-Mounted Display for Shared Mixed
Reality”, IEEE and ACM International Symposium on Mixed and Augmented
Reality (ISMAR 2002), pp.149-156, 2002.
[6] H.Ishii, and B.Ullmer, “Tangible Bits: Towards Seamless Interfaces between People,
Bits and Atoms”, Proc. Conference on Human Factors in Computing Systems
(CHI1997), ACM Press, pp.234-241, Mar.1997.
[7] D.Bandyopadhyay, R.Raskar, and H.Fuchs, “Dynamic Shader Lamps: Painting on
Real Objects”, Proc. International Symposium on Augmented Reality (ISAR2001),
pp.207-216, 2001.
[8] D.Cotting, M.Naef, M.Gross, and H.Fuchs, “Embedding Imperceptible Patterns into
Projected Images for Simultaneous Acquisition and Display”, Proc. International
Symposium on Mixed and Augmented Reality (ISMAR2004), pp.100-109, Nov.2004.
[9] 白井良成, 松下光範, 大黒毅, “秘映プロジェクタ: 不可視情報による実環境の拡張”,
The 11th Workshop on Interactive Systems and Software (WISS2003), pp.115-122,
2003.
[10] 徐剛,“写真から作る3次元CG”, 近代科学社, 2001.
29
[11] 清水慶行, 太田直哉, 金谷健一, “信頼性評価を備えた最適な射影変換の計算プログラ
ム”, 情報処理学会研究報告 98-CVIM-111-5 (1998-05), pp.33-40, May.1998.
[12] http://www.ail.cs.gunma-u.ac.jp/Labo/program.html
[13] H.Kato, M.Billinghurst, “Marker Tracking and HMD Calibration for a Video-based
Augmented Reality Conferencing System”, International Workshop on Augmented
Reality (IWAR1999), pp.85-94, 1999.
[14] http://www.hitl.washington.edu/artoolkit/
[15] 日本色彩学会,
“色彩科学ハンドブック”,東京大学出版会,1989.
[16] R.W.G.Hunt, “MEASURING COLOUR”, ELLIS HORWOOD, 1991.
[17] 井口征士, 佐藤宏介, “三次元画像計測”, 昭晃堂, 1990.
30
本研究に関連する公表論文
¾
向川康博,永井悠文,大田友一
“SpaceRelighter: 現実空間における照明環境の記録と再現”
信学技報 PRMU 2003-202, pp.25-30, Jan.2004.
¾
永井悠文,向川康博,大田友一
“動的シーンに対する仮想光学パターンの投影”
第 3 回情報科学技術フォーラム(FIT2004), 情報科学技術レターズ, Vol.3, pp.179-182,
Sep.2004.
¾
永井悠文,向川康博,大田友一
“プロジェクタ型複合現実感のためのスクリーン物体の追跡”
信学技報 MVE 2004-37, pp.1-6, Oct.2004.
¾
Y.Mukaigawa, H.Nagai, Y.Ohta
" SpaceRelighter -Recording and Reproducing Illumination in a Real Scene-"
Proc. International Conference on Virtual Systems and Multimedia (VSMM2004),
pp.109-118, Nov. 2004.
¾
永井悠文,向川康博,大田友一
“パターン埋め込みによる動的シーンへの適応的投影”
信学技報 PRMU 2004-159, pp.31-36, Jan.2005.
31
付録 A
3章で用いた使用機器の仕様
本研究の3章で用いた機材の仕様を表 A.1 と表 A.2 に示す.
表A.1 プロジェクタ(PLUS 社製 U4-136)仕様
DLPTM(単板 DMD)方式
投影方式
DMD
サイズ
0.7 型
画素数
786,432 画素(1024 x 768)
光源
投影レンズ
150W 高圧水銀ランプ
ズーム
フォーカス F=2.6~2.9
光学装置
色再現性
明るさ
コントラスト比
走査周波数
1.2
f=27.5~33.0mm
ダイクロイックフィルタによる光時分割合成方式
1,677 万色
1500 ANSI ルーメン
1500 : 1
水平
15~80KHz
垂直
50~85Hz
外形寸法
質量
190(幅)x 53(高)x 239(奥行)mm
約 1.5 kg
表 A.2
カメラ(Logicool 社製 QV-4000)仕様
接続
画像センサ
フォーカス
動画イメージサイズ
静止画イメージサイズ
フレームレート
有効画素数
32
USB ポート
CCD
16cm~∞ 手動調整
最大 640x480
最大 1280x960
最大 30fps
VGA 640 ×480
付録 B
4章で用いた機材の仕様
本研究の4章で用いた機材の仕様を表 B.1 と表 B.2 に示す.
表 B.1
プロジェクタ(EPSON 社製 EMP-74)仕様
投影方式
液晶パネル
三原色液晶シャッタ式投影方式
サイズ
0.7 型
画素数
786,432 画素(1024 x 768)x 3 枚
光源
200W UHE ランプ
投影レンズ
ズーム
フォーカス F= 1.7~1.9
色再現性
明るさ
コントラスト比
走査周波数
1.2
1,677 万色
2000 ANSI ルーメン
500 : 1
水平
15~92KHz
垂直
50~85Hz
外形寸法
質量
表 B.2
f= 21.0~25.0mm
315(幅)x 87(高)x 240(奥行)mm
約 2.9 kg
カメラ(SONY 製 DFW-VL500)仕様
インターフェース
画像センサ
ズーム
動画イメージサイズ
フレームレート
有効画素数
外形寸法
質量
IEEE1394-1995
1/3 型 PS CCD
12
最大 640x480 YUV
最大 30fps
659 ×494
60(幅)x 61(高)x 118.5(奥行)mm
約 335g
33
© Copyright 2026 Paperzz