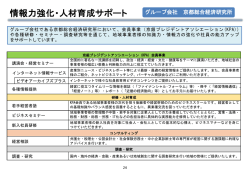
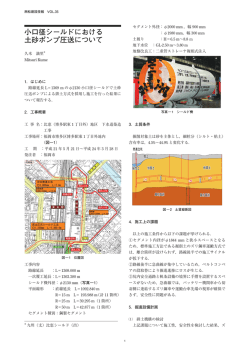
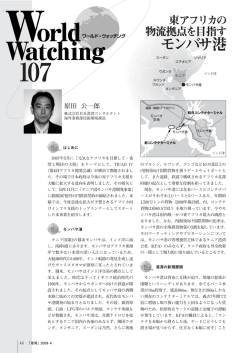
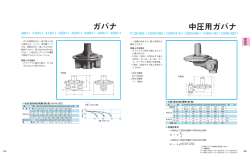
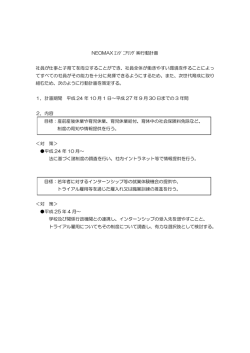
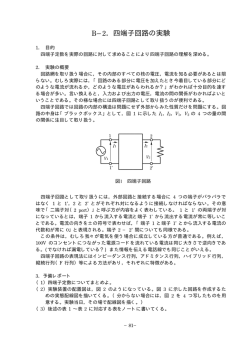
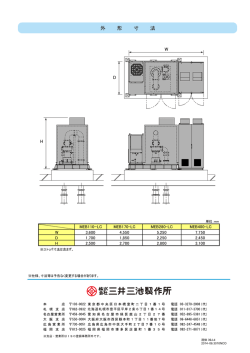
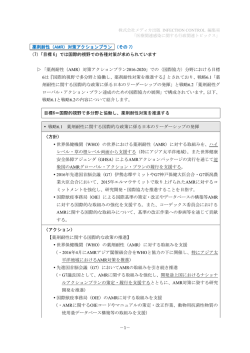
永久磁石を用いた生体内三次元位置センサの開発とその応用 Development of 3-D position sensor using permanent magnet 研究者代表 早稲田大学・助手 永岡 隆 共同研究者 早稲田大学・教授 内山 明彦 [研究の目的] 低侵襲治療や患者生活レベル向上の観点か とでより有用な消化管内の映像を取得するシ ステムの開発を行う。 ら、カプセル型内視鏡をはじめとするカプセ ル型医療機器に対する期待は大きい。しかし [研究の内容、成果] カプセルの生体内での正確な位置を計測する 開発した三次元位置センサの概観を図 1 に ことはまだ実現していない。そこで本研究で 示した。本研究ではカプセルに内蔵された永 は永久磁石を用いたカプセルの生体内位置計 久磁石の作る磁場を生体外のセンサで受信し、 測を行う。永久磁石が作る磁場を体外のセン 得られた磁場の強さからカプセルの位置・姿 サで計測し、数学的手法を用いて位置を求め 勢を計測する。永久磁石の任意の点における る。カプセルに電子回路を搭載する必要が無 磁場の強さは式(1)のように求めることがで いため、大幅な小型化が期待できる。本研究 きる。 で開発したセンサの臨床応用例として、消化 2 ∨ 3 M R R M R B 0 5 4 R 管内出血部位検出センサの開発を行う。カプ セルに出血検知センサと永久磁石を搭載し、 位置情報を同時計測することで、消化管内で の出血部位を正確に検知する。 ただし 本研究では研究目標として、具体的な数値 (1) M sin cos x x R y , M M y M sin sin cos z Mz ∨ 目標を定めている。まず、患者が飲み込む際 は真空の透磁率を示し、R は磁気双極子 に一番大きな問題となる、カプセルのサイズ からの距離、M は磁気双極子ベクトルを示し として、一般的な薬品のカプセルに使われて ている。式(1)より、磁場の強さは原点からの いるサイズで最大程度である直径 10 mm 以 距離の 3 乗に逆比例していることがわかる。 下、長さ 15 mm 以下とし、精度に関しては 静磁場を検出する方法として、ホール素子な 既存の有線式三次元位置センサと同様の精度 ど様々なセンサが挙げられるが、本研究では である磁場発生装置より 1m の範囲内での計 小型・高感度という特徴を持つフラックスゲ 測誤差が 1 mm 以下、駆動時間は排泄までの ート磁気センサを採用した。また後述する通 平均的時間である 20 時間以上の安定動作を り、本研究の位置計測アルゴリズムでは計測 目指す。この目標仕様は現在市販されている 値と理論値を比較するため、センサがある点 カプセル内視鏡 M2A の性能を参考に設定し での磁場の強さの 3 直交軸方向の成分を正確 ている。M2A は直径 11 mm、長さ 26 mm に計測する必要がある。フラックスゲート磁 と大型で飲み込みにくく、連続動作時間も 8 気センサは素子を垂直に貫く磁場成分のみを 時間であり、消化管末端では計測できない可 検出するため、1 つだけでは磁場の強さの 3 能性が高い。また位置も計測することができ 直交軸方向の成分を計測することはできない。 ない。最終的にはこの M2A に我々が開発し そこで本研究では 3 つのフラックスゲート磁 た位置センサを付着させ、同時に計測するこ 気センサが互いに直行し、かつ原点が一致す るように配置した。このように配置すること 十分な検出範囲の確保が困難である。永久磁 で、各フラックスゲート磁気センサが検出す 石を用いた位置計測システムの検出限界は、 る磁場の強さから、センサの原点を通る磁場 使用する永久磁石と磁気センサによってほぼ の強さの 3 直交軸方向の成分を得ることがで 決定されてしまう。先行研究においても、永 きる。 久磁石を用いた場合の計測範囲は数 cm から 3 次元の位置を計測する場合、未知数とな るのは空間位置ベクトル(3 次元)と、空間座 十数 cm であることが多い。 本研究では生体内全体を計測できるように、 標系に対するセンサの角度(2 次元)の計 5 次 1 m を計測範囲の目標として設定している。 元であり、式(1)に示した x, y, z,であ しかしながら後述するとおり、本研究で開発 る。センサの存在する点での磁場ベクトルの したセンサでは、250 mm が計測の限界であっ 絶対値|B|と適切な x, y, z,を式(1)に た。そこで計測範囲を挟み込むように 2 つの 代入して求めた同じ点での磁場ベクトルの絶 センサアレイを配置して、精度を保ったまま 対値の理論値|B’|は式(2)に示す通り、一 検出範囲拡張に関する検討を行った。本来で 致するはずである。 あれば 250 mm が計測限界であるセンサを 2 B B' 0 つ正対させれば、倍の 500 mm まで計測が可能 (2) となるが、そのように配置すると、計測誤差 そこで、これらの 5 変数を求めるために、 が最大となる領域が計測空間の中心部となっ 既知の異なる 5 か所の位置にセンサを配置し、 てしまい、計測能力を有効に活用することが 磁場|B1|~|B5|を計測する。得られた できない。そこで本研究では 2 つのセンサア |B1|~|B5|を式(2)に代入し、同様に磁 レイを 300 mm の間隔で正対させ、精度検証を 場の大きさの理論値|B1’|~|B5’|も式 行った。 (2)に代入する。 できた 5 つの方程式を前述し センサアレイが 2 つに増えることで、3 軸セ たガウス・ニュートン法を用いて未知変数の ンサの数も倍に増える。全ての計測値を用い 数値解を求めると、センサの位置・姿勢を計 て式(3)をガウス・ニュートン法を用いて収束 測することができる。実際には式(3)に示す させると、それぞれの 3 軸センサの誤差がオ が最小となるように処理を続け、一定以下の フセットとして影響してしまい、誤収束や発 誤差に収束した結果を計測値としている。 散が増加してしまう恐れがある。そこで直前 ∨ ∨ ∨ ∨ ∨ 5 ∨ ∨ ∨ (H n H n ') (3) また、本研究で開発したセンサは静磁場を n 1 に得られた計測値から永久磁石の位置と各 3 軸センサとの立体角を求め、 立体角が 60 度を 越える場合には収束に用いる計測値の対象か 用いているため、周囲の磁性金属等の存在に ら外す処理を加えた。 よる磁場の歪みが位置検出に大きな影響を及 さらなる計測範囲の拡大には、SQUID などさ ぼす。本研究で開発したセンサは最終的にカ らに微小な磁場を計測することができる磁場 プセル型内視鏡などのカプセル型医用機器で センサを併用することで、計測範囲の拡大は の利用を想定しているため、手術室のような 可能であると考えるが、患者をシールドルー 周囲に多数の磁性金属が存在する環境での使 ム内に留める必要がある。患者 QOL 向上の目 用に対応する必要がある。そこで、歪んだ磁 的からは、利便性の低下を招くセンサの選択 場環境でも計測が可能な補正アルゴリズムを は現実的ではないと考える。 採用し、 計測値から真値に近い補正値を得た。 磁界は距離の 3 乗で急激に減衰するため、 ットとして計測し、位置計測中は常に出力値 からオフセット分を減算した。 図 1 三次元位置センサの概観 本研究で用いた永久磁石は表面磁束密度が約 0.5 T の希土類ネオジウム磁石(NEOMAX 社 製)を採用した。本研究で開発した磁場受信セ ンサを図 2 に示した。磁場の受信にはフラッ クスゲート磁気センサ(NEOMAX 社製)を用 図 2 磁場受信センサ いた。長さは 3.0 mm、高さは 0.5 mm であ り、1 mG から 100 mG までの磁場を計測す 方眼紙上に磁石を置き、方眼紙の値とセンサ ることができる。3 軸センサは 11.5 mm 角の の出力値を比較することで、精度検証を行った。 アクリル立方体から 7.5 mm 角の立方体を削 その結果を図3に示した。 磁気センサから約300 り取って作られた 3 面にフラックス磁気ゲー mm の範囲内での誤差は 5.5±3.2 mm ( 平均± トセンサを設置している。3 軸センサの原点 標準偏差 )であった。生体内で同様の実験を行 は 3 面の交点とし、3 つのフラックス磁気ゲ ったが、差異は認められなかった(2)。 ートセンサは原点から 0.75 mm ずれた位置 に設置した。3 軸センサはユニバーサル基板 上にそれぞれの中心が40 mmずつ離れた3 x 3 の格子状に配置され、信号処理装置と接続 している。センサが受信した信号の処理には PC(Dimension 530、デルコンピュータ社製) を用いた。 位置の表示には OpenGL を利用し た表示系を構築し、リアルタイムで三次元位 置の追跡を可能にした。信号の入力制御と演 算には、LabVIEW(National Instruments 図 3 精度検証実験の結果 社製)を用いた。センサの時間波形は A/D 変 換(分解能 16 bit、 サンプリング周波数 2 kHz) また、開発したセンサはフラックスゲート され、信号処理プログラムに送られる。各セ 素子を採用していたが、計測可能な最小磁界 ンサから受信した磁場強度に比例した出力電 が 10 mG と大きいため、システムの計測範 圧値を連続的に計測し、得られた計測値から 囲が狭いことが問題であった。そこで、1 mG センサの位置・姿勢を計測・表示した。ただ ~2 G までの測定が可能である AMR 素子 し地磁気やセンサ特性のばらつきによる影響 (Honeywell 社製)を採用し、センサ変更に伴 をキャンセルするために、まず永久磁石が存 う駆動回路やプログラムの改良を実施した。 在しない状態での各センサの出力値をオフセ 磁気センサの感度軸方向について測定した結 果、7 mG 付近までは計測電圧と真値との誤 良により計測可能な最小磁界をさらに小さく 差が 10 %を下回った。 することを予定している。しかし、計測可能 [今後の研究の方向、課題] な最小磁界を下げることで相対的に地磁気の 開発したシステムでは、2 枚の磁気センサア レイを計測空間を挟み込むように設置したが、 変動幅が大きくなることが問題であり、その 対策が今後の課題である。 この方法だと計測空間の中心部で誤差が大き くなることや、永久磁石がセンサアレイに対し て平行になると誤差が拡大する問題点が判明 した。そこで図 4 に示したコンピュータシミュ レーションプログラムを開発し、磁気センサの 配置の検討を行った。その結果、図 4 に示した ように計測空間全体を円柱状に包む形状のと きに最も誤差が少なく計測できることが分か [成果の発表、論文等] (1)永岡 隆, 市川大輔, 内山明彦: “永久磁石を用 いた三次元位置センサの開発とその応用”, 生 体医工学, Vol. 42, No. 4, pp. 300-306 (2004) (2)市川大輔, 永岡 隆, 武田 朴, 内山明彦: “永 久磁石を用いた位置検出システムの開発(第三 った。磁気センサの間隔については今後さらに 報) ”, 第44 回日本生体医工学会大会論文集, Vol. 検討を加える予定である。 43, Suppl. 1, pp. 412 (2005) (3)Nagaoka Takashi: “DEVELOPMENT OF 3-D POSITION PERMANENT SENSOR MAGNETS BY IN USING THE DIGESTIVE TRACT”, The 3rd European Medical and Biological Engineering Conference EMBEC´05 (2005) (4)永岡 隆: “永久磁石を用いた三次元位置センサ 図 4 コンピュータシミュレーションによる 磁気センサの最適配置の検討 の開発と評価”, 電子情報通信学会 2005 年ソサ イエティ大会 (2005) (5)市川大輔, 永岡 隆, 武田 朴, 内山明彦: “永 AMR 素子を利用して、フラックスゲート 久磁石を利用した三次元位置センサの応用”, 素子により構築したシステムと同じシステム 電気学会研究会資料(医用・生体工学研究会), を構築する場合、計測範囲を 400 mm まで広 MBE-05 巻 1~6 号, pp. 7-12 (2005) げることが可能となる。また、駆動回路の改
© Copyright 2026 Paperzz