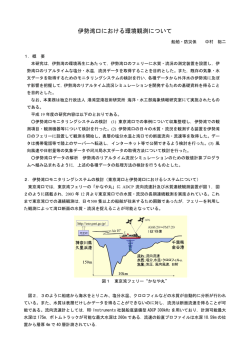
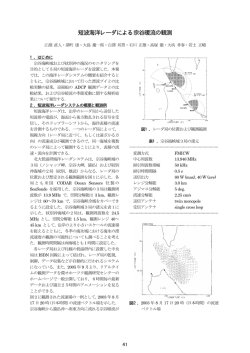
OS-ADCP コマンドリスト ADCP の観測設定は、コマンドファイルで決定されます。 VmDas でのオペレーションでは VmDas のメニューからの設定と、コマンドファイル(txt)での設定が出来ま す。 1 OS-ADCP 標準コマンド群 VmDas をインストールすると、各タイプ、周波数別のコマンドファイル PC(パーソナルコンピュータ)にコピーさ れます。 必要なコマンドはこのファイルに入っているので、ユーザーはこれを書き換えて設置条件、環境、目 的に合ったコマンドファイルを作成します。 コマンド種類 1-1 システムコマンド 1-2 ブロードバンドモードの ウォータートラックコマンド 1-3 ナローバンドモードの ウォータートラックコマンド 1-4 ボトムトラックコマンド 1-5 タイミングコマンド コマンド CR CB WP WN WS WF WV WD NP NN NS NF ND BP BX BA BC TP TE EZ 1-6 環境設定コマンド 1-1 システムコマンド EX 意味 CR1 で工場出荷時設定に戻す 通信設定 1 アンサンブルの発信ピング数 設定層数 設定層厚 トランスデューサ前のブランク設定 Ambiguity 速度 潮流測定結果の出力項目の選択 1 アンサンブルの発信ピング数 設定層数 設定層厚 トランスデューサ前のブランク設定 測定結果の出力項目の選択 1アンサンブルの発信ピング数 ボトムトラック最大到達深度 ボトムトラック探知のための反射強度の Bump ボトムトラックの Correlation 閾値 ピング発信間隔 アンサンブル間隔 ADCP の持つセンサーの ON/OFF、及び外 部センサーの信号入力設定 ADCP データのコーディネーション、トラン スフォーム設定 工場出荷時設定 38kHz 75kHz 150kHz 411 1 128 3200 1600 800 1600 800 400 390 390 390 111110000 000 050 3200 1600 800 1600 800 400 111110000 1 20000 10000 05000 30 220 000300 000200 000100 00000000 1011101 00000 EA ED ES ミスアライメント角度(ADCP 取り付け角度) 塩分値 0 0 35 CK 入力した値をユーザーデフォルト値に固定 - トランスデューサの深さ(喫水) 以上のコマンドが、OS-ADCP 標準コマンドです。 SEA 株式会社エス・イー・エイ 1-1 システムコマンド 1-1-1 CR 設定を工場出荷時の値又はユーザーデフォルトの値にする フォーマット : CRn (n = 0 , 1) CR0 ユーザーデフォルト (CK コマンドで RAM に記録した設定を読み込む) CR1 工場出荷時設定 (ROM に記録している設定を読み込む) ※必ずコマンドファイルの文頭で使用する。 1-1-2 CB ォーマット デフォルト 推奨値 RS232C、RS422 の通信設定 :CBabc (a = baud rate, b = parity, c = stop bits) :CB411 :CB511 値 a = baud rate b = parity c = stop bits 0 Default (9600) Default (None) Default (1 Bit) 1 1200 None 1Bit 2 2400 Even 2Bit 3 4800 Odd 4 9600 High 5 19200 Low 6 38400 7 57600 8 115200 ※コマンドで設定した値と、VmDas メニュー上(「Communication」タブ内、「ADCP Input」)の設定とを 合わせる。 1-1-3 CK 現在の設定を ADCP の Flash RAM に記録する。 (読み込みは CR0) ※コマンドファイルの最後に使用する。 SEA 株式会社エス・イー・エイ 1-2 ブロードバンドモードのウォータートラックコマンド ブロードバンドモードの観測設定です。 OS-ADCP にはブロードバンドモード(BB)とナローバンドモード(NB)があり、それぞれ別のコマンドで設定さ れます。 ブロードバンドモードとナローバンドモードの ON/OFF は、それぞれの発信回数コマンド(WP 及び NP)で決め られます。 (WP0 でブロードバンドモード OFF、NP0 でナローバンドモード OFF) 1-2-1 WP 1 アンサンブル(平均データ)の発信回数 フォーマット :WPnnn (0~999) デフォルト :WP1 推奨値 :WP1 ※VmDas では常にコマンドで WP1 に設定し、平均処理は VmDas で行います。 ※WP0 で、ブロードバンドモード OFF 1-2-2 WN 設定層数 フォーマット :WNnnn (0~128 層) デフォルト :WN128 推奨値 :WN ※計測距離は、 WS × WN + WF +α 層厚 層数 ブランク となります。 ※+α は、機器の周波数、Ambiguity などによって変わります。 例) Ambiguity390 のとき 周波数 層厚 プラスα 38kHz 75kHz 150kHz 24m 16m 8m 約 12m 約 8m 約 4m 1-2-3 WS 設定層厚 フォーマット :WSnnnn (38kHz=80~6400cm、75kHz=40~3200cm、150kHz=20~1600cm) デフォルト :38kHz=WS3200、75kHz=WS1600、150kHz=WF800 ※層厚が大きいほど音波の到達距離は長くなり、単ピングの測定精度が高くなります。 SEA 株式会社エス・イー・エイ 1-2-4 WF トランスデューサから計測開始までのブランク距離(0~9999cm) (発信後すぐに計測すると、トランスデューサ自体、または周辺に残っている振動を計測してしまうの で、ある程度時間をおいてから計測開始する必要があります。) フォーマット :WFnnnn (0~9999cm) デフォルト :38kHz=WF1600、75kHz=WF8000、150kHz=WF400 ※周波数が低いほど大きいブランク距離が必要です。 また、船底トランスデューサチャンバー内に 発生する残響時間が長い場合これを大きくしなければなりません。 1-2-5 WV ブロードバンドモードの Ambiguity Velocity (ADCP の各ビームが計測可能なビームに対しての最 大速度) フォーマット :WVnnn (0~390cm/s) デフォルト :WV390 推奨値 :WV390 ※OS のブロードバンドモードでは、WV を最大 390cm/s に制限されています。 このため、各ビームに オフセットを持たせて、計測限界を拡張しています。 ADCP は 3 番ビームがヘディングなので、各ビームのオフセット値のデフォルトは 3 番ビームを前に して取り付けたときにより大きい船速で計測できるよう決められています。 Beam 1、Beam2 Beam 3 Beam 4 :0 :+195cm/s :-195cm/s 通常、より速い船速に対応できるよう、ADCP は 3 番ビームが右 45°前方に向くように取り付けら れます。 これにより、船速方向に計測可能なスピードが 3 番ビームを船首方向に取り付けたときの √2 倍になります。 (次ページ図参照) 各ビームが船速方向に計測できる最大速度(船速)Vsmax は、下記の式で求めることができます。 Vsmax = (WV + offset) / sin(beam angle) / cos(rotation angle) beam angle : ADCP ビーム角度(鉛直下向きに対して何度方向に発信しているか) rotation angle : 取り付け角度(船首方向に対して ADCP の Heading を何度回して取り付けたか) 例) ビーム角度 30 度、取り付け角度 45°、WV390 のときの船速方向への各ビームの最大計測範囲 Vsmax は、上式を用いると Beam1、Beam2 Beam3、Beam4 :±11m/s :-5.5m/s~+16.5m/s ※船首方向が+ となり、船首方向に最大約 20 ノットまで計測可能です。 また、オフセット値を Beam 1、Beam 3 :+195cm/s Beam 2、Beam 4 :-195cm/s とすることで、全てのビームの最大計測範囲が-5.5m/s~+16.5m/s となり、33 ノットの船速まで使 用できます。 SEA 株式会社エス・イー・エイ ビーム速度ベクトルから船首方向速度ベクトルへの計算 式①、②より、 Vs = Vb / sin(bean angle) / cos(rotation angle) ビーム方向に対する最大計測速度は WV + offset なので、最大計測可能船速(Vsmax)は Vsmax = (WV + offset) / sin(bean angle) / cos(rotation angle) 1-2-6 WD 測定結果の出力項目 フォーマット :WDabcde0000 (a=流速のデータの出力、b=相関量の出力、c=エコー強度の出力、d =%GOOD の出力、e=ステータス値の出力、0:OFF、1:ON) デフォルト :WD111110000 推奨値 :WD111110000 ※後ろ 4 桁は使用していない SEA 株式会社エス・イー・エイ 1-3 ナローバンドモードのウォータートラックコマンド ナローバンドモードの観測設定です。 OS-ADCP にはブロードバンドモード(BB)とナローバンドモード(NB)があり、それぞれ別のコマンドで設定さ れます。 ブロードバンドモードとナローバンドモードの ON/OFF は、それぞれの発信回数コマンド(WP 及び NP)で決め られます。 (WP0 でブロードバンドモード OFF、NP0 でナローバンドモード OFF) 1-3-1 NP 1 アンサンブル(平均データ)の発信回数 フォーマット :NPnnn (0~999) デフォルト :NP1 推奨値 :NP1 ※VmDas では常にコマンドで NP1 に設定し、平均処理は VmDas で行います。 ※NP0 で、ナローバンドモード OFF 1-3-2 NN 設定層数 フォーマット :NNnnn (0~128 層) デフォルト :NN128 推奨値 :NN ※計測距離は、 NS × NN + NF +α 層厚 層数 ブランク となります。 +α は、機器の周波数などによって変わります。 例) 周波数 層厚 プラスα 38kHz 75kHz 150kHz 32m 24m 16m 約 16m 約 12m 約 8m 1-3-3 NS 設定層厚 フォーマット :NSnnnn (38kHz=1600~6400cm、75kHz=800~3200cm、150kHz=400~1600cm) デフォルト :38kHz=NS3200、75kHz=NS1600、150kHz=NF800 ※層厚が大きいほど音波の到達距離は長くなり、単ピングの測定精度が高くなります。 1-3-4 NF トランスデューサから計測開始までのブランク距離(0~9999cm) (発信後すぐに計測すると、トランスデューサ自体、または周辺に残っている振動を計測してしまうの で、ある程度時間をおいてから計測開始する必要があります。) フォーマット :NFnnnn (0~9999cm) デフォルト :38kHz=NF1600、75kHz=NF8000、150kHz=NF400 ※周波数が低いほど大きいブランク距離が必要です。 また、船底トランスデューサチャンバー内に 発生する残響時間が長い場合これを大きくしなければなりません。 SEA 株式会社エス・イー・エイ 1-3-5 ND 測定結果の出力項目 フォーマット :NDabcde0000 (a=流速のデータの出力、b=相関量の出力、c=エコー強度の出力、d =%GOOD の出力、e=ステータス値の出力、0:OFF、1:ON) デフォルト :ND111110000 推奨値 :ND111110000 ※後ろ 4 桁は使用していない ナローバンドモードの Ambiguity Velocity ナローバンドモードの Ambiguity Velocity にはブロードバンドモードのようなオフセットはなく、450cm/s で固定 です。 各ビームが船の船首方向に計測できる最大速度(船速)Vsmax は、ブロードバンドモードの式 Vsmax = (WV + offset) / sin(beam angle) / cos(rotation angle) の「WV + offset」が 450cm/s となり、下記の式で計算します。 Vsmax = 450 / sin(beam angle) / cos(rotation angle) beam angle : ADCP ビーム角度(鉛直下向きに対して何度方向に発信してるか) rotation angle : 取り付け角度(船首方向に対して ADCP の Heading を何度回して取り付けたか) ビーム角度時計回りに 45°回して取り付けたときの船速方向への最大計測可能速度は 12.72m/s(約 25 ノッ ト)です。 SEA 株式会社エス・イー・エイ 1-4 ボトムトラックコマンド 流速を計測するウォータトラックに対してボトム(海底)に対するスピード(船速)を計測する機能の設定です。 1-4-1 BP 1アンサンブルのボトムトラックピングの発信数 フォーマット :BPn (0~999) デフォルト :BP1 推奨値 :BP1 ※VmDas では常にコマンドで BP1 に設定し、平均処理は VmDas で行います。 1-4-2 BX ボトムトラック最大計測深度 フォーマット :BXnnnn (0~99999dm) デフォルト :38kHz=BX20000、75kHz=BX10000、150kHz=BX5000 推奨値 :38kHz=BX21000、75kHz=BX12000、150kHz=BX8000 ※ここで設定された深度まで、ボトムトラックの計測を行います。 ここで設定した深度以上は、ボトム トラックが有効な範囲であっても計測されません。 下記 BA、BC を調整したときには上記推奨値以深の計測ができる可能性があるので、検討の際に はより大きい値を設定してください。 1-4-3 BA ボトムトラック探知のための反射強度の Bump(振幅) フォーマット :BAnnn (0~255count) デフォルト :BA30 推奨値 :BA20 ※ボトムからの反射強度は、水中からの反射に比べて大きくなり ます。 この反射強度の違いが BA で設定した値以上のときに、そこをボ トムと判断します。 ※BA を小さい値に設定しすぎると、ボトムより手前をボトムと誤 認する可能性があります。 1-4-4 BC ボトムトラックの Correlation 閾値 (発信音と受信音の相関値のフィルター) フォーマット :BCnnn (0~255count) デフォルト :BC220 推奨値 :BC200 ※255 で Correlation100% ※低い値に設定すると、ボトムデータエラーの可能性があります。 ※VmDas を使用して計測するとき、コマンドで設定した BC の値よりも大きい値をソフトウェア上で設 定することが可能です。 例えば、コマンドで BC100 と設定した場合、VmDas 上で 100 以上の任意の BC 値を設定することが SEA 株式会社エス・イー・エイ 可能になります。 ボトムトラックデータにエラーが多いなどのとき、コマンドで BC を低めの値に設定 して観測を行い、VmDas で設定値を変えて再処理(リプロセス)を行うことで最適な BC 値を検討する ことができます。 1-5 タイミングコマンド 発信間隔、アンサンブル間隔を決めるコマンドです。 VmDas では、「ADCP Setup」タブの「Ensemble time」でアンサンブル間隔を制御します。 「ping as fast as possible」にチェックをすると「TP000000」、「TE00000000」を送信し、そのときの設定で可能 な最大の速度で計測を行います。 「Set time between ensembles」にチェックをすると、VmDas から CS コマンドを送信し、VmDas メニューで指定 した間隔での計測を行います。 1-5-1 TP ピング発信間隔 フォーマット :TPmmssff (mm=分、ss=秒、ff=100 分の 1 秒) デフォルト :38kHz=TP000300、75kHz=TP000200、150kHz=TP000100 推奨値 :TP000000 1-5-2 TE アンサンブル間隔 フォーマット :TEhhmmssff (hh=時、mm=分、ss=秒、ff=100 分の 1 秒) デフォルト :TE00000000 推奨値 :TE00000000 SEA 株式会社エス・イー・エイ 1-6 環境設定コマンド 計測環境に関する設定コマンドです。 1-6-1 EZ ADCP の持つセンサー 及び 外部センサー信号入力の設定 フォーマット :EZcdhprstu (c=音速、d=深さ、h=ヘディング、p=ピッチ、r=ロール、s=塩分、t=温 度、u=アップダウン) デフォルト :EZ10111010 推奨値 :EZ10200010 値 フィールド 備考 0 1 2 C= ED、ES、ET から EC の値 音速 計算された値 d= 船の喫水を ED ED の値 深さ で設定 h= EH の値 内蔵センサーの値 外部ジャイロの値 ヘディング p= EP の値 内蔵センサーの値 外部ジャイロの値 ※下記参照 ピッチ r= ER の値 内蔵センサーの値 外部ジャイロの値 ロール s= ES の値 塩分 t= ET の値 内蔵センサーの値 温度 可 搬 型 ADCP u= アップダウン EU の値 - - で使用 (船底装備型で は使用しない) ※ヘディング、ピッチ、ロールデータ OS-ADCP はトランスデューサにヘディングセンサー及び傾きセンサーを持っていな いため、外部から入力する必要があります。 ●ヘディングデータ (必須) ①デッキユニットに入力する場合 (アナログ信号) > シンクロまたはステッパー信号でデッキユニットに入力 > EZ コマンドのフィールド h を「2」に設定 (デッキボックスに入力した 外部ジャイロの値が ADCP のデータとして出力されます。) > VmDas の「Transform」タブで「ADCP Compass/gyro」を選択。 ②PC に入力する場合 (デジタル信号) > NMEA0183 形式の RS232C 信号で PC のシリアルポートに入力 > VmDas の「Communication」タブ内、「RPH Input」を設定 > VmDas の「Transform」タブで入力するデータ形式($xxHDT、$PRDID を使用するよう設定 SEA 株式会社エス・イー・エイ ●ピッチ、ロール(傾き)データ (オプション) ③デッキユニットに入力する場合 (アナログ信号) > シンクロ信号でデッキユニットに入力 (オプションのインターフェー スが必要です。) > EZ コマンドのフィールド p、r を「2」に設定。 (デッキボックスに入力 した外部ジャイロの値が ADCP のデータとして出力されます。) > VmDas の「Transform」タブで「ADCP Tilt sensor/gyro」を選択。 ※通常、傾きデータを使用するときはデジタル信号で PC に入力します。 ④PC に入力する場合 (デジタル信号) > NMEA0183 形式の RS232C 信号で PC のシリアルポートに入力 > VmDas の「Communication」タブ内、「RPH Input」を設定 > VmDas の「Transform」タブで入力するデータ形式($xxHDT、$PRDID を使用するよう設定 ヘディング、傾きデータともに、アナログ信号でデッキユニットに入力する場合は出港前にデッキユ ニットのオフセットを合わせる必要があります。 1-6-2 EX コーディネート(座標)、トランスフォーム設定 フォーマット :EXnnnnn デフォルト :EX00000 推奨値 :EX00000 EX00xxx ビームコーディネート(ビーム座標) EX01xxx インストゥルメントコーディネート(機器座標) EX10xxx シップコーディネート(船座標) EX11xxx アースコーディネート(地球座標) EXxx1xx ピッチロールセンサーのトランスフォーム EXxxx1x 3 ビームソルーション EXxxxx1 ビンマッピング ※VmDas ではビームコーディネートで計測し、PC 上でコーディネート変換を行います。 したがって、 常に EX00000 を使用します。 SEA 株式会社エス・イー・エイ 1-6-3 EA ミスアライメント角度 (ADCP 取り付け角度) フォーマット :EA±nnnnn (-179.99~+180.00 度) デフォルト :EA0 推奨値 :EA4500 (通常、時計回りに 45°回して取り付け) 1-6-4 ED トランスデューサの深さ(喫水) フォーマット :EDnnnnn (0~65535dm) デフォルト :ED0 推奨値 :船の喫水による 1-6-5 ES 塩分値 フォーマット :ESnn (0~40ppt) デフォルト :ES35 推奨値 :ES35 (沿岸域は ES34) SEA 株式会社エス・イー・エイ 2 OS-ADCP オプションコマンド 標準コマンドのほかに、アプリケーションによって必要なコマンドです。 コマンド種類 2-1 トリガー制御コマンド コマンド CX 意味 トリガーINPUT/OUTPUT の制御 工場出荷時設定 1,1 2-1 トリガー制御コマンド CX 他の音響機器との同期発信の設定 フォーマット :CXa,b (a=INPUT の設定、b=OUTPUT の設定) デフォルト :CX0,0 (同期を使用しない) 推奨値 :アプリケーションによる コマンド トリガーINPUT/OUTPUT 設定 a : INPUT の制御(0~5) ADCP がスレーブのときに使用 0 : INPUT オフ 1 : トリガー信号立ち上がりで ADCP 発信 2 : トリガー信号立ち下がりで ADCP 発信 3 : トリガー信号立ち上がり立下りで ADCP 発信 4 : +5V HIレベルで ADCP 発信 CXa,b 5 : 0V LOW レベルで ADCP 発信 b : OUTPUT の制御(0~4) ADCP がマスターのときに使用 0 : OUTPUT オフ 1 : 発信時にトリガー出力 2 : 受信時に+5V 出力 3 : 発信、受信時に+5V 出力 4 : 発信、受信時に0V その他+5V出力 ※別紙、「ADCP 同期信号」を参照してください。 SEA 株式会社エス・イー・エイ
© Copyright 2026 Paperzz