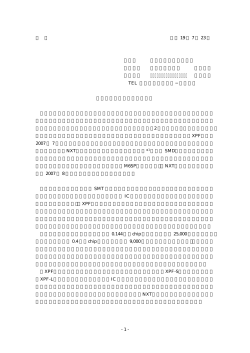
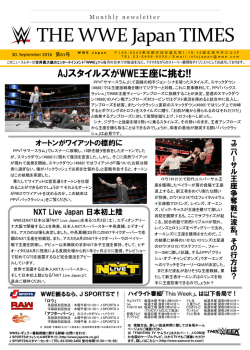
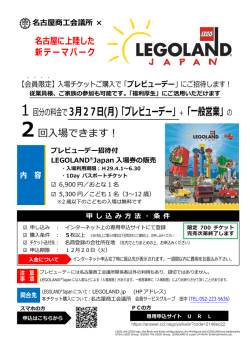
第3会場:16-206 会場世話人 渡邉 第1セッション(10:00~10:36) 座長:井上 知泰 10:00 3-B1 電子ビーム誘起方位選択エピタキシャル成長によるCeO2(100)/Si(100)成長条 件の最適化~電子ビーム加速電圧と酸素ガス流量~ D05029 佐藤 裕太,D05045 中島 瑛介,D05058 本林 哲郎 10:18 3-B2 電子ビーム誘起方位選択エピタキシャル成長のための反応性スパッタ装置へ の吸収電流像観察法の導入 D05024 小針 翔太,D05031 新保 浩志,D05055 松田 直樹 休憩(10:36~10:45) 第2セッション(10:45~11:48,13:00~13:24) 座長:大表 良一 10:45 3-C1 運動による筋疲労測定について part3 -筋疲労の蓄積- D05018 菊池 渉,D05053 星 和裕 11:00 3-C2 ETロボコン 距離計の正確性と電圧の関係 D03059 杉山 高広 11:08 3-C3 ETロボコン 灰色検知プログラムについて D04020 小野 善博 11:16 3-C4 ETロボコン 電圧、距離、タイムによるモーター性能値の検証 D05022 黒尾 彰宏 11:24 3-C5 ETロボコン ツインループコースの難所攻略アルゴリズム D05056 宮下 悠 11:32 3-C6 ETロボコン 点線LINE走行について D05068 渡邉 幸洋 D05033 鈴木 勝 11:40 3-C7 NXT用プログラム開発環境の整備 昼休み(11:48~13:00) 13:00 3-C8 PSoC接近センサーの試作 13:08 3-C9 PSoCマイコンを利用した距離測定器の試作 13:16 3-C10 PSoCを使用したCapSenseの動作実験 D04051 高荒 拓希 D05008 大関 裕貴 D05011 大山 誠史 休憩(13:24~13:35) 第3セッション(13:35~14:40) 座長:竹内 良亘 13:35 3-G1 等角写像による歪み画像のマッチング 13:50 3-G2 画質を劣化させて改善する検討 14:05 3-G3 画像の幾何変形における劣化の改善 D05013 小野 愛恵,D05028 佐藤 香 D05015 面川 秀文,D05019 櫛田 恭央 D05035 関 康浩,D05057 村山 堅一 14:20 3-G4 物体画像での円弧検出 D03024 大部 弘人 14:30 3-G5 劣化画像における復元アルゴリズムの複合的応用 D05040 竹田 清貴 発表終了 14:40 2008 年度 卒業研究要旨 3-B1 電子ビーム誘起方位選択エピタキシャル成長による CeO2(100)/Si(100) 成長条件の最適化 ∼ 電子ビーム加速電圧と酸素ガス流量 ∼ D05029 佐藤裕太, D05045 中島瑛介, D05058 本林哲郎, 指導教員: 井上知泰 [序論] 我々は将来の MOS トランジスタのゲート絶縁膜等への応用を目的として, Si(100) 基 板上の極薄 CeO2 膜のエピタキシャル成長の研究を行っている. これ迄に, 反応性スパッ タによる CeO2 膜の成長中に印加する基板バイアスを制御することにより CeO2 (100) 或 は CeO2 (110) を選択的にエピタキシャル成長できることを見出した. 今年度はこの方位 選択エピタキシャル成長の 2 次元パターンニング化への発展を目指し, 基板バイアス印 加に代わる手段として, 低速電子ビーム照射法を検討した. エピタキシャル成長の条件と して, 低速電子ビームのエネルギーと, 酸素流量の両面について最適化を図るための実験 を詳細に行った. [実験] Si 基板には Si(100) ウェーハを 52×52 mm 角にカットしたものを用いた. 基板前処理 には, 超純水, HCI+H2 O2 (1:1) 混合液及び HF+H2 O (1:10) 混合液を用いてウェット洗浄 を行った. 反応性スパッタ法による CeO2 膜形成に使用した装置の概略図を図 1. に示す. CeO2 の形成には, 2 段階成長法による反応性マグ ネトロンスパッタ法を用いた. 誘導コイルおよび カソードにそれぞれ 50 および 120 W の高周波 電力を印加した. CeO2 層形成中は, 基板表面に 差動排気電子銃を用いて低速電子ビームを照射し た. Si 基板に 80∼95 eV の電子ビームを照射し ながら, 膜厚∼ 20 nm の CeO2 層を形成した. こ のとき Ar ガスの流量を 6 sccm とし, 酸素流量 を 0.65∼1.05 sccm の幅で変化させた. 成長温度 と成長時間はそれぞれ 800◦ C と 120 s であった. 反応性スパッタには, 酸素ガス導入のみと, 酸素 ラジカル照射の 2 種類の方法を用いた. 作成した 試料の成長方位を反射型高速電子回折 (RHEED) を用いて評価した. 結晶方位成分と結晶性の評価 には θ-2θ 法 の X 線回折装置 (XRD) , SIMADZU 製 XRD-6100 型を使用した. 図 1. スパッタ装置の概略図 試料を左右に 5 mm ずつずらし, CeO2 (200) のピークが最も大きくなる個所を探して, XRD の本測定を行った. 測定角度範囲は 25 ∼ 65 度で, ステップ幅を 0.02 度に設定した. データの信頼性を高めるために, 50 回測定し, そのデータを積算して S/N 比を改善した. [結果] 図 2. は 90 eV 電子ビーム照射で成長させ た試料の XRD 測定結果を示したものである. この測定結果から, 33 度付近の CeO2 (200) のピークが大きいので CeO2 (100) 方位に成 長していることが分かった. 85,90,95 eV の電 子ビーム照射で成長させた CeO2 (200) ピー クの半価幅と, その誤差を図 3. に示した. 図 中の ° 印は酸素ガス導入のみの場合, □ は 酸素ラジカル照射を利用したものを表す. こ のグラフから低速電子ビームは 90 eV のエ ネルギーが最適であり, 酸素ラジカル照射し た方が格段に良い結晶を形成できることが分 かった. 図 2. 90 eV 電子ビーム照射しながら形成し た CeO2 (100)/Si(100) 試料の XRD パターン 0.80 0.75 0.70 0.65 0.60 0.55 0.50 0.45 0.40 75 80 85 90 95 100 EB energy (eV) FWHM of (200) peak (degree) FWHM of (200) peak (degree) 図 4. が示すように, 最適酸素流量は酸素ガス導入のみの場合は 0.9 sccm であり, 酸素 ラジカルビーム利用の場合 0.8 sccm となり酸素ラジカルの利用によって 0.1 sccm 程下が ることが分かった. この事から酸素ラジカルには酸化促進作用があることが分かった. 酸 素ガス導入のみの場合と酸素ラジカルビーム利用の場合の最適条件での試料の半値幅はそ れぞれ 0.617◦ と 0.490◦ であり, 酸素ラジカルビーム利用により半値幅が 2 割減少し, 結 晶性が大幅に改善されることが分かった. 1.0 0.8 0.6 0.6 0.7 0.8 0.9 1.0 1.1 oxygen flow (sccm) 図 3. 85 , 90 , 95 eV の電子ビーム照射で 成長させた CeO2 (200) 膜の半価幅のグラフ 図 4. XRD(200) ピークの半値幅と酸素流量 の関係 [結論] RHEED,XRD の測定結果から, 電子ビーム照射法による CeO2 (100) 層の方位選択エピ タキシャル成長では最適なエネルギーが 90 eV であることが分かった. また, 最適酸素 流量値を求めた. 酸素ラジカル照射を利用した方がよりよい結晶を成長できることが分 かった. [参考文献] 1. T. Inoue, H. Ohtake, J. Otani and S. Shida, J. Electrochm. Soc.,155 (2008) G237-G240. 2008 年度 卒業研究要旨 3-B2 電子ビーム誘起方位選択エピタキシャル成長のための 反応性スパッタ装置への吸収電流像観察法の導入 D05024 小針 翔太・D05031 新保 浩志・D05055 松田 直樹 指導教員: 井上知泰 [序論] 我々は Si(100) 基板上の極薄 CeO2 膜のエピタキシャル成長の研究を行っている. 電子ビーム照射法を用いた反応性スパッタによる CeO2 (100) 層の方位選択エピタキシャル 成長に成功し, 昨年から 電子ビームエネルギーや酸素流量を最適化するための実験を進め ている. 従来のスパッタ装置では, 電子ビームの正確な照射位置が分からなかったが, 今 年度は Si(100) 基板を可視化をするために, 吸収電流像観測システム (AEI) を新たに導入 した. [実験] 今回導入した試料表面画像化のための AEI 装置を付加したスパッタ装置全体の 概略図を図1. に示す. スパッタチャンバーの下部にスパッタカソード, 上部にハロゲン ランプ加熱機構付きの試料マニュピレータがある. 試料面を斜め下から臨む方向にラジカ ル源と差動排気式電子銃がある. 図の右側に AEI 装置があり, 電子ビームを試料面上に走 査し, 試料吸収電流を AEI アンプで増幅し, 輝度変調して吸収電流像を TV モニタに映し出 す. この装置を使って電子ビーム照射位置や照射領域を制御するための基礎実験を行った. ハロゲンランプ Si 基板 差動排気式電子銃 ラジカル源 AEI アンプ TMP TVモニタ O2 MFC Ar MFC 電子ビーム 走査電源 スパッタカソード 図 1. スパッタ装置の概略図. 25 20 beam current (µA) 15 10 5 0 -5 -4 -3 -2 -1 0 1 2 3 4 5 -5 -10 -15 -20 -25 y-position 図 2. 90eV 電子ビーム照射時の吸収電 流像. 図 3. Y 軸上の電流強度分布. [結果] 図 2. は 90 eV の電子ビームを照射した時の試料の吸収電流像である. この図の 四角形の明るい部分は Si(100) 基板 (52 × 52 mm2 ), その外側の黒い部分はインコネル製 試料ホルダである. 基板の明るい部分は吸収電流が大きく, 暗い部分は電流が小さい事を 示している. また, AEI を利用した電子ビーム照射の基本操作モードとしては, スポット・ ライン・領域の 3 種類の電子ビーム照射法を利用できる. これらの操作モードの動作条件 は図1. の右下の電子ビーム走査電源を用いて制御する. スポットモードは, 上下左右どこ でも任意の場所を照射することができる. ラインモードは, X 軸上をビーム走査するもの で, ラインの位置を上下に移動可能である. 領域モードは, 任意の大きさの範囲とその位置 を指定して照射できる. この様にして, AEI を用いる事により, 電子ビーム照射位置を明確 に認識できる様になり, 電子ビーム照射位置を精密に制御できる事が明らかとなった. 図 3. は, 試料上 Y 軸方向の電流分布を示し, 試料面内は, ほぼ均一な分布となっている. [結論] 電子ビーム誘起方位選択エピタキシャル成長実験に用いる反応性スパッタ装置 に, 吸収電流像観測システム (AEI) を付加した事によって照射位置が明確に分かり, 照射 位置を精密に制御できる事が判明した. また, AEI の操作法において, ライン・スポット・ 領域の 3 種類の操作モードを確立した. [参考文献] 1. T. Inoue, H. Ohtake, J. Otani and S. Shida, J. Electrochm. Soc., 155 (2008) G237–G240. 2. T. Inoue, S. Shida and K. Kato, J. Cryst. Growth, 289 (2006) 534–539. 3. T. Inoue, Y. Nakata, S. Shida and K. Kato, J. Vac. Sci. Technol., A 25 (2007) 1128-1132. 2008 年度 電子情報学科 卒業研究 3-C1 part3 運動による筋疲労測定について D05018 菊地 渉、D05053 星 和裕 1、目的と変更点 今回も昨年の実験を引き継ぎ、上腕二 ―筋疲労の蓄積― 指導 教員:大表 良一 集し、 「疲労の蓄積」の観察と評価を試み る。 頭筋を対象にLCRメータを使用し 「静電容量を計測する方法」の実験を 2、測定方法 行い、運動に伴う筋疲労測定が可能か LCR メータを使用して、同じ動作を どうかを確認することと、昨年の実験 休憩の前後に行う事によってどのような で判明した問題点を出来るだけ解消す 変化が起きるのか調べることを目的とす る事を目的とする。 る。計測回数は計測箇所 A,B 合わせて5 なお、本年度の主な変更点は以下の 4つである (1)新たな測定箇所を模索し二の腕 の中心以外の測定箇所として上腕二頭 2回で、運動前、一回目の運動後、1回 目の休憩後…6回目の休憩後までである。 同じ計測方法で5日間計測を行う。なお、 この研究は本研究室で行った。 筋の動きに注目した (2)運動量の増加として昨年度の 3kg のダンベルによる運動20回×2セ 3、実験方法 (1)被験者の利き腕の上腕二頭筋、 ットからダンベルの重さを 5kg に変更し、 肩関節から肘関節の長さを測りその長さ さらに運動量も増やしより「疲労感」を を1/2の部分を中心点とし印①を付けた 感じる状態での測定を試みる。 所を軸とし、今度は測定者の腕周りを測 (3)測定周波数が変化した場合の り、その長さを4で割り、値を求め印① 測定データの変化の観察、昨年度のイン を付けた部分から右に求めた値と左に求 ピーダンス測定の際の基本周波数 1kHz を めた値の所に単回使用心電用電極を貼り 10kHz に変化させてみた場合の評価と比 この電極の場所を測定箇所:A とする。 較を試みる。 (2)肩関節から肘関節の長さの 1/4 (4)データの収集数の変更、昨年 と 3/4 の部分に印を付ける。で印を付け 度より、多人数に対し数回の測定をする た所を軸とし、 (1)で測った測定者の腕 「広く浅く」データを収集する方法では 輪周りの長さを2で割り、値を求めで印 変化の量が少なかったので本年度は少人 を付けた部分から対角に位置する所に印 数に対し多数の測定をする「狭く深く」 を付けて電極を張る。この電極の場所を データを収集する方法にして評価を試み 測定箇所:Bとする。 る。さらに本年度は単に測定回数を増や すだけではなく5日間に渡りデータを収 単回使用心電用電極にLCRメータに つないである電極リードを測定箇所:A に つけ、始めに何もしない時の 1k と 10k 数値を記録する。同じように測定箇所:B も測定する。次に電極リードを一旦外し 5、考察 結果を見て気になるのは静電容量が日 に日に下がっているという点だ。 被験者は5kg のダンベルを利き腕にも 実験を行うに当たって5日間運動をす ち、ダンベルアームカールする。ダンベ れば日に日に静電容量は上がるのでは? ルアームカール 20 回終了後に各測定箇所 と考えていたがまったく逆の結果が出て で周波数をごとに測定する。次に5分間 しまった。 休憩を置く。その間、測定者は自由時間 しかし運動時には静電容量が上昇して だが電極リードは電極リードは外してお おり、さらに運動前の静電容量は日に日 く。休憩終了時の数値を記録する。同じ に下がっている。 つまり運動する事により静電容量は一 事を6回行い、数値を記録する。 この計測を5日間続ける。 時的に上昇する。そして疲労により平常 この記録したデータを元にグラフ化、数 時の静電容量が減少する。これは疲労物 値変化を調べ、それぞれのデータを比較 質と静電容量に関係性が有るのではと推 した。 測できる。 一例としてグラフを1つ示す。 上記の疑問を解消するべく行った追加 静電容量[nF] 図1 測定箇所A 1kHz 19 18 17 16 15 14 13 12 運動前 実験により、測定値は本実験の3~5日 目付近の値を得る事が出来た。 1日目 2日目 3日目 4日目 5日目 運動後3 休憩5回 これにより運動前の測定値は本実験3 ~5日目の値に近い事がわかった。 だが、測定毎の測定値の上昇率は本実験 1 日目の値の様に大きく変化している。 上記のことから、運動前の静電容量は 筋力によって決まり、筋疲労によって静 電容量の上昇、及び上昇率が決まる。と 4、追加実験 考えられる。 実験結果より、測定値の減少には筋力 の増強に関係が有るのか否か、と言う疑 7、参考文献 問が出てきたのでその疑問を解消するべ 廣瀬和彦(2007)『筋電図判読テキスト』 く追加実験を行った。 文光堂 426pp 目的は、約2ヶ月経過による筋力の減 少、及び測定数値の変化を観察した。 なお、実験方法については本実験と同 様なので省略する。 バイオメカニズム学会(2007)『生体情報 科学』東京電機大学出版局 169pp バイオメカニズム学会(2008)『表面筋電 図』東京電機大学出版局 167pp 2008 年度 電子情報学科 卒業研究・制作・講読 要旨 3-C2 ETロボコン 距離計の正確性と電圧の関係 D03059 杉山 高広 指導教員:大表 良一 1、概要 今回の卒業研究において、私が取り上げたのは『ET ロボコン』です。 『ET ロボコン』とは、 ET ソフトウェアデザインロボットコンテストの愛称であり、今現在の家電の中でなくてはならな い組み込み技術を教育し、UML(Unified Modeling Language)等で分析、設計したソフトウェアの技術 を競う大会である。この中で必要な距離計を作り組み込むことで、距離を把握し、設定の数値で停止 するプログラムを作る。 2、研究目的 今年度、いわき明星大学においてETロボコンに初出場することになり、大会上で必要となるゴー ル後きちんと範囲内で止まるという動作のために、正確な距離計を作ることである。 3、使用機器 今回の研究で使用した機器は、次の通りである。 ・ RCX1.0(走行体)LEGO社製 図1参照 ・ 開発環境がインストールされているPC ・ IRタワー(赤外線転送装置) ・ 単3電池(Panasonic EVOLTA) ・ テストコース 図2参照 図1、RCX1.0走行体 図2、テストコース 4、開発環境 今回の研究上で必要であった開発環境は、次の通りである。 ・ OS:Windows XP ・ 開発環境ソフトウェア:Cygwin ・ 実行環境ソフトウェア:birckOS(LEGO Mindstorms 上で実行する OS) ・ コンパイル環境:H8 クロスコンパイラ ・ プログラミング言語:C 及び、C++言語 5、距離計アルゴリズム 走行開始→距離計始動→区間ごとの距離計測(時間×速度)→区間距離の総計→設定距離との 比較→走行停止 6、研究内容 まず、走行できるプログラムを言語C++で構築し、実際に問題なく走行できるかを確認する。 次に距離計も同じく言語C++で構築し、きちんとストップできることを確認する。構築した言 語中にある、Kという値を 0~100 まで変化させ、テストコース 5 周(約 16.9 メーター)を走ら せ、どれだけ正確に止まれるかを実験する。また K とは、実走行と計算上の走行距離の比である。 先の実験で取れた実験データで一番正確なものを使い、今度はバッテリー残量と速度によって距 離計がどれだけ変化するかを調べる。 7、研究結果 今回の実験のデータでは、一番正確と思われるK値は90で、このときの実走行距離は 17.24 メータある。また誤差は、1.89%であった(図3) 。K 値が一定として、距離計の速度とバッテリ ーの依存を考えた場合、5.5%~29.9%位のズレをみせることが判明した(図 4)。図 3 で最初に 一定になっているのは停止しないため、計測不可能だったからである。また、図 4 で 100 以前が ないのは機体が動かなかったためである。 K値変換と距離の関係 速度による距離計の誤差 30 周回数 25 20 距離 (周回数) 15 10 距離の誤差 35 40 30 20 10 0 % 0 5 0 0 20 40 60 K値 80 100 50 100 速度 150 200 120 図 3、K 値変換と距離の関係 図 4、速度による距離計の誤差 8、考察 このデータではまだまだ詰めの甘いものであるということが解る。今回のデータでは実験回数 が、少なすぎたためデータとしてはまだ足りないと考える。バッテリーの依存による週回数の違 いについては、途中で上がったり下がったりしているが、これは電圧が変わったことで、プログ ラム上のモーターの速度が一緒でも、実際に走らせたときの速度が違ってしまったためと思われ る。また、K 値の速度依存が思ってた以上に大きかったことも原因だと考えられる。 9、今後の課題 今後の課題は、実験データが少なすぎるために距離計が正確とはどうしても言えないため、実 験を増やし、より正確なデータをとることが必要だと考える。また、距離計や、そのほかのプロ グラムについても改善する余地がまだまだあると考える。 2008 年度 電子情報学科 卒業研究・制作・講読 要旨 3-C3 ET ロボコン 灰色検知プログラムについて D04020 小野 善博 指導教員:大表 良一 1.背景 現在の組込みシステムは, 日本の産業競争力に欠くことの出来ない重要な分野となってき ている。パソコンを始め、 エアコンや冷蔵庫、テレビなど家の中にあるものだけでも。相 当の数のコンピュータ制御を使用した製品があり、 このようなコンピュータ制御を行う技 術の中に、組込みシステム技術は使われているのである。 2、目的 ET ロボコンでは、コース上に灰色の領域が用意され、難所と呼ばれる特殊コースの入り 口を表している。したがって、難所を走行するためには、灰色領域を正確に認識する必要が ある。そこで、灰色認識アルゴリズムを検討し、C++プログラムとして実装をおこない、ア ルゴリズムの妥当性とプログラムの性能評価を行う。また、これらの作業を介して、オブジ ェクト指向開発手法と C++言語によるプログラミング手法を学ぶ。 3、ET ロボコンとは ET ロボコンとは、Embedded Technology の略で組み込みソフトウェアにおける技術教育を 目的に、LEGO 社製の車体で決められたコースを自立走行する競技である。大会では、組み 込みソフトウェアの技術やオブジェクト指向設計技術、規定のコースを周回するタイムを競 い合競技である。 4、使用器具 研究を実施するにあたり、以下の装置を使用した。 ・RCX1.0(走行体)LEGO 社製 ・IR タワー(開発環境で作成した RCX 制御プログラムを赤外線で RCX へ転送する装置) ・開発環境(概要を次節に示す)がインストールされている PC ・Viscotecs 社製 ET ロボコン公式テストコース 5、開発環境 開発環境はコンテスト実施主体が公開しているものをそのまま使用した。以下にその概略 を示す。 • 開発に使用したコンピュータ OS:Windows XP、Windows VISTA でも可 • 開発環境ソフトウェア:Cygwin • 実行環境ソフトウェア:brickOS(LEGO RCX で動作する OS でこの制御の下でアプリケ ーションプログラムが動作する) • コンパイル環境:H8 用クロスコンパイラ(Cygwin 中で動作) • プログラミング言語:C++言語 C 言語 6、灰色認識アルゴリズム アルゴリズムを状態遷移表であらわしたものを次表に示す。 フラグ 光レベル 0(初期値) 1 2 3 4 灰色と白 との閾値 以上 ターンイン NOP NOP NOP ターンイン フラグ1 ハンドル固定 フラグ0 ハンドル固定 フラグ2 現在時刻保存 (t0) フラグ3 表2に記載 ターンアウト フラグ0 ターンアウト フラグ0 灰色候補カウ ンタ0 同左 中間値 灰色と黒 との閾値 以下 ターンアウト フラグ0 NOP NOP 表1 内部状態表 時刻計測(t1) t1-t0<TX なら NOP t1-t0>=TX ならターンアウト フラグ4 灰色候補カウンタ+1 表2 表1の一部の詳細 ここで、ターンインとはハンドルを領域内にむけること、ターンアウトとはハンドルを白領 域にむけることを意味する。フラグは内部状態を表し、0~4の値をとる。NOP は何もせず 次の状態を待つことを意味する。TX は定数で黒領域が発見できない場合(灰色領域の可能 性が高い)ターンアウトするまで待つ時間である。値は実験により定めることとする。灰色 候補カウンタは、灰色領域と判定した回数を表し、安全のため2以上で灰色領域と確定する ことにしてある。この値は変更可能であるが、あまり大きな値とすると灰色領域を通過して しまう危険性もある。 7、実験方法 今回の実験は、上記アルゴリズム採用した灰色認識オブジェクトと単純ライントレース 機能オブジェクトを C++で実装し走行体を用意し、デモコースの黒領域からスタートさせ、 灰色領域を認識するとその場で停止するようプログラムした走行体を使用して行った。 8、実験結果 今回の実装では、灰色認識の安定性が不十分で、認識に成功する場合と失敗しコースアウ トする場合があった。したがってルゴリズムの妥当性や、プログラムの正当性を評価できな かった。特に、認識に成功した場合でも、その場でハンドルを停止させたのち、駆動モータ も停止させるようプログラムしてあるにも関わらず、ハンドルモータや駆動モータが停止し なかった。 9、考察 灰色領域認識に失敗した場合、駆動モータとハンドル駆動モータの双方が回転をし続けて いる状態でコースアウトすることが頻発したが、今回使用したロボット制御マイクロコンピ ュータが実装された RCX は内部状態を実時間で外部装置(パソコンなど)に送る機能が貧弱 でプログラムのデバッグが困難を極めた。そのため、現時点ではこの理由が不明である。今 後内部状態を RCX 内の記憶装置に保存するようプログラムを変更し、不安定性の原因追及を 行いたい。 2008 年度 電子情報学科 卒業研究・制作・購読 要旨 3-C4 ET ロボコン 電圧,距離,タイムによる、モーター性能値の検証 D05022 黒尾 彰宏 指導教官:大表 良一 1.はじめに ET ロボとは、ラインの色(白,灰色,黒)を認識させ、自律走行させる LEGO ブロック の車体である。コースの黒(灰色)と白の境目を識別しながら走行することが出来る。 ET ロボコンとは、その車体を用いて、『ロボット走行性能(タイムレース)』と『ソフ トウェア設計モデル評価』の2つの側面で審査する競技である。 2.目的 ET ロボ走行体の駆動モーター,電池電圧の制御方法を介して、オブジェクト指向開 発方法と C++言語によるプログラミング方法を学ぶ。具体的には、時間と電圧によっ て車体がどのくらい進むかを調べる。 3.使用器具 研究に当たって使用した使用器具は下記の通りである。 • LEGO 社製 RCX1.0(走行体) (図 1) • IR タワー(赤外線プログラム転送装置) • 開発環境がインストールされている PC • メジャー(10m) 図 1. RCX1.0(走行体) 4.開発環境 研究に当たって使用した開発環境は下記の通りである。 OS:Windows XP 開発環境ソフトウェア:Cygwin 実行環境ソフトウェア:brickOS(RCX 上で実行する OS) コンパイル環境:H8 クロスコンパイラ Terapad(SDI タイプのテキストエディタ) プログラミング言語:C++言語,C 言語 5.走行時間設定のアルゴリズム 設定した時間が経過すると停止するプログラムを作り、実験する。時間は、RCX に 内蔵されているマイクロプロセッサのシステムクロックから求めるので、かなり正確 である。 時間設定 → プログラム起動 → 一定時間走行 → 停止 6.実験方法 走行時間を 1,3,5,7,9 秒に設定する。その後、車体を直進させ、時間どおりに止ま るか確認する。時間どおりに止まることが確認できたら、車体が何m進んだかを測定 する。時間と距離と速度の関係をグラフにし、どのような傾向があるのかを調べる。 7.実験結果 走らせた結果は、表1の通りである。速度に換算すると表 2 のようになる。 10 1.0 9 0.9 8 7 6 9000mV 8500mV 8000mV 7500mV 距離(m) 5 4 0.8 速度(m/秒) 0.7 3 0.6 2 1 0.5 0 1 3 5 時間(秒) 7 表1.時間と走行距離 9 7500 8000 8500 9000 電圧(mV) 表 2.電圧と平均速度の関係 上記のグラフにより最も長く進んだ電圧は 9000mV,進まなかった電圧は 7500mV で あったが、3 秒から 9 秒走行時に 8500mV よりも 8000mV の方が進むという結果になっ た。 8.考察 基本的に、電圧が高い方が長い距離を走ることが出来る。しかし、8000mV と 8500mV については、電圧の低下よりプログラム上の時間の進み方が遅くなっている為と推察 できる。ただし、7500mV で距離が下がっているのは、電圧が足りない為、モーターの 出力がプログラムの設定値まで出ていないためと考える。 9.今後の課題 走らせた時間が 9 秒と短かったので、さらに長い距離を走行させるとどのように 変化するか。また、直線だけでなく曲線を含むテストコースを走らせ、走行する距離 を直線の場合と比較し、どのくらい変化があるのかを検証したい。 10.参考文献 (1)ET ロボコン 2008 公式サイト http://www.etrobo.jp/ETROBO2008/index.html 2008 年度 電子情報学科 卒業研究・制作・講読 要旨 3-C5 ET ロボコン ツインループコースの難所攻略アルゴリズムについて D05056 宮下 悠 指導教員:大表 良一 1、目的 ET ロボコン走行体の駆動・舵モータ、電池・電圧、光センサのプログラム制御方法を介 して、オブジェクト指向開発手法と C++言語によるプログラミング手法を学ぶ。特に、ロ ボットコンテストコース中のツインループコース難所を通過するプログラムを実装する。 又、走行実験を行い、アルゴリズムの妥当性を調べる。 駆動モータ速度を変えながらエッジ切り替え機能の特性や精度を調べる。 2、ET ロボコンとは ET ロボコンとは、Embedded Technology の略で組み込みソフトウェアにおける技術教 育をテーマに、レゴブロックの車体で決められたコースを自立走行する競技である。大会 では、組み込みソフトウェアの技術や規定のコースを周回するタイムを競い合う。 3、使用器具 (図 1 参照) ・RCX1.0(走行体)LEGO 社製 ・IR タワー(赤外線転送装置) ・開発環境がインストールされている PC ・ツインループコース図 図 1. RCX1.0 走行体 4、開発環境 OS:Windows XP 開発環境ソフトウェア:Cygwin 実行環境ソフトウェア:brickOS(RCX1.0 上での実行 OS) コンパイル環境:H8 クロスコンパイラ プログラミング言語:C 及び、C++言語 5、ツインループ走行アルゴリズム 図 2.にツインループ部分を示す。又、以下に走行アルゴ リズムを示す。 左エッジ走行→第一ループ入口→右エッジ走行→第一 ループ出口→左エッジ走行→第一、第二ループの間 →右エッジ走行→第二ループ入口→左エッジ走行→ 第二ループ出口→右エッジ走行→左エッジ走行 図 2. ツインループコース図 6、実験方法 今回の実験は、距離計で走行距離を把握し、設定距離に達すると、走行エッジを切り 替えるプログラムを作成して行った。灰色マーカの場所でエッジ切り替えプログラムし ツインループコースの走行実験を行った。エッジ切り替えの指示を出す時、その距離を 走ったら走行体をいったん停止させ、トレースラインの中心(黒領域)からエッジ切り 替えをする方向へくるように指示を出すようなプログラムにし、実験はツインループコ ースのみを印刷し走行スピードを変えて行った。また、第一ループ、第二ループの間で も走行エッジを切り替えるようにした。切り替え点は事前にコース図の距離を実測して 決めた。 7、実験結果 10 回走らせた結果、第一ループは完全に抜けることが出来たが、第二ループでは抜けら れなかったり、エッジ切り替えでコースアウトしてしまったりすることがあった。エッジ 切り替え機能の特性の実験結果を表1に記す。 駆動モータ速度 結果 コメント 147 △ まれに失敗する。 187 ○ 成功。 227 × 走行がぶれて不安定になった。 表 1. エッジ切り替え機能の特性 駆動モータ速度設定値 187 のときがエッジ切り替えの成功率が高く、最適な速度だとい うことが分かった。この時はエッジ切り替え成功率は 70%だった。ツインループコース全 体の走行の成功率は 30%だった。 8、考察 ループを抜けられなかったり、設定と違うところでエッジ切り替えしたりしてしまうの は、距離計の誤差のためだと思われる。また、コースに光が反射して光センサの読み取り 誤作動が起きたためでもあった。自分で C++プログラムを書いてロボット制御の仕方が分 かった。 9、参考文献 (1)ET ロボコン 2008 公式サイト http://www.etrobo.jp/ (2)レゴマインドストームを用いたライントレースマシンの実機調査 齋藤 彰宏 著 2008 年度 電子情報学科 卒業研究・制作・講読 要旨 3-C6 ET ロボコン 点線 LINE 走行について D05068 渡辺 幸洋 指導教員:大表 良一 1、背景 ・現在の組込みシステムは, 日本の産業競争力に欠くことの出来ない極めて重要な分野とな ってきている.組込みシステムとは, パソコンを始め, エアコンや冷蔵庫, テレビなど家の 中にあるものだけでも, 相当の数のコンピュータ制御を使用した製品があり, このような コンピュータ制御を行う技術の中に, 組込みシステム技術は使われているのである. 2、目的 ETロボットの走行体の駆動モータ、舵モータ、光センサを使い、ロボットコンテスト の点線コースを止まらずに通過するプログラムを作成することで、プログラムの制御方法 と、オブジェクト指向開発手法、プログラミング言語の知識を深める。 3、ET ロボコンとは 決められたマイコン搭載のライントレースロボットのソフトウェアを作成し,黒のライン の引かれた競技トラックを走行させ,走行時間とオブジェクト指向設計を競うコンテストで ある。 4、開発環境 今回の研究に当たって使用した開発環境は下記の通りである。 OS:Windows XP and Vista 開発環境ソフトウェア:Cygwin 実行環境ソフトウェア:brickOS(RCX 上で実行する OS) コンパイル環境:H8 クロスコンパイラ Terapad (SDI タイプのテキストエディタ) プログラミング言語:C 言語、C++言語 5、使用器具 今回の研究に当たって使用した使用器具は下記の通りである。 ・RCX1.0(走行体)LEGO 社製 (図 1 参照) ・IR タワー(赤外線プログラム転送装置) ・開発環境がインストールされている PC ・点線直線コース (図2参照) 図 1. RCX1.0 走行体 6、点線ラインの概要 ET ロボットコンテストの大会の中で, コースの難所として用意されていたコースのこと である. 大会では作成出来なかった点線コースを走行できるプログラムを作成することを 目標として実験を行った。 7、点線ライン走行アルゴリズム 図 2.に点線ラインコース図を示す。 図 2. 点線ラインコース図 又、以下に走行アルゴリズムを示す。 黒ラインの右側エッジを走行→白ラインに来たら光センサが黒ラインを検知するまで左 20 度の角度に向けたまま走行→黒ラインが来たら再び右エッジ走行をする。 8、実験内容 terapad を使い、点線コース専用のプログラムを C++言語で作成し、作動するかプロ グラムをコンパイルして確認する。無事にコンパイルが完了したら、実際に点線コース 上を走らせて通過するか確かめる。点線の白と黒の間隔をヘッドの読み取り速度の値を 変えてどの値が一番確実に通過できるかを確認する。 9、実験結果 30 回走らせた結果、黒の点線18個を半分以上通過できる確率は最初のスタートの誤認 識を除けば 82%ほどであった。だが、完全に通過する確率は 51%ほどであった。 10、考察 最初のスタートの誤認識の原因はスタート時のヘッド位置が原因であった。完全に通過 出来る時と出来ない時の違いは、コース図を作成するときの貼り付けの際に生じた隙間が 黒色と誤認識したのではないかと思われる。その理由は、コースアウトする位置が決まっ て紙の接合点のすぐ後でコースアウトするからである。 11、今後の課題 実験コースが 1 枚だけだったので今後はコースを改良し、白の間隔や黒の幅をどこまで 広げることが出来るかを検証したい。また、直線だけでなくコンテストで使われる実際の 点線コースを使い、通過できるように修正するなど、改善が多数ある。 12、参考文献 (1)ET ロボコン 2008 公式サイト 2008 年度 電子情報学科 卒業研究・制作・講読 要旨 3-C7 NXT 用プログラム開発環境の整備 D05033 鈴木 勝 指導教員:大表 良一 1.目的 今回の研究では来年度参加予定のロボットコンテストで使用される、LEGO 社製ロボット 制御ブロック NXT を使用したロボット制御プログラムを、C または C++で開発するための 開発環境を整備し、簡単なロボット制御プログラムを記述、コンパイルし NXT で動作させ ることを目標とする。また、これらの作業を介して、オブジェクト指向開発手法と C++言語 によるプログラミング手法を学ぶ。 2.NXT 制御プログラム開発環境 NXT を利用したロボットの制御プログラムは NXT に標準搭載されているファームウェア や LEGO 社から提供されているプログラム開発環境“LEGO MINDSTORMUS Edu NXT” などを使用すると、グラフィカルな環境で簡単にプログラムを作成、ダウンロードできる。 しかし、より細かな制御をおこないたい場合には C や C++でプログラムを組む必要があり、 そのための開発環境も別途必要になる。こうした目的のための開発環境はすでにいくつか公 表されているが、今回は、コンテスト実施主体が推奨している、nxtOSEK という NXT 用 OS とその下で動作するアプリケーションプログラムを作成する環境を整備し、その使用経 験を積むこととした。 3.環境・使用機材、ソフトウェア 研究を実施するにあたり、以下の装置、ソフトウェアを使用した。 • 開発に使用したコンピュータ OS:Windows XP、Windows VISTA でも可 • 開発環境ソフトウェア:Cygwin • 実行環境ソフトウェア:nxtOSEK(LEGO NXT で動作する OS でこの制御の下でアプリケ ーションプログラムが動作する) • コンパイル環境:GNUARM クロスコンパイラ(Cygwin 中で動作) • デバイスドライバ:USB を介して NXT へオブジェクトプログラムを転送するさい必要 • プログラミング言語:C または C++言語 • 4.環境整備手順 環境整備に必要なソフトウェアはすべて無償で公開されているものばかりであり、以下の ものをインターネット経由でダウンロード、PC にインストールした。 1) PC 上の UNIX 環境実現のための CYGWIN 2) GNUARM クロスコンパイラ(nxtOSEK およびアプリケーションプログラムをコン パイルする) 3) nxtOSEK(NXT 上で動作する OS) 4) nxtOSEK やアプリケーションプログラムを NXT へダウンロードする際に必要にな る Windows 用デバイスドライバ これらのソフトウェアのインストール手順を以下に示す。 ①Cygwin は cygwin のサイトから 1.5.x 以降のバージョンをダウンロードし Setup.exe を起動 させ、cygwin をマルチバイト文字及びスペースを含まないディレクトリにインストールする。 このとき make もインストールしておくこと。 ②GNU ARM のサイトのファイルセレクションから GCC-4.0.2 ツールチェイン (bu-2.16.1_gcc-4.0.2-c-c++_nl-1.14.0_gi-6.4.exe)をダウンロードし、cygwin と同じにディレク トリ内にインストールする。 ③LEGO software update website から LEGO MINDSTORMS NXT Driver v1.02 をダウンロード し setup.exe を起動し、USB ドライバをインストールする。 次に John Hansen 氏のサイトから NXT 通信用 PC コンソールプログラムである NeXTTool をダウンロードし、これも Cygwin と同じディレクトリにインストールする。 また同サイトから拡張ファームウェアをダウンロードし NeXTTool 格納ディレクトリにコ ピーしておく。 ④nxtOSEK のサイトから nxtOSEK の ver.2.06 をダウンロードし、これも Cygwin と同じよう にディレクトリにインストールする。その ecrobot ディレクトリ下に GNU ARM へのパス設 定等を行う tool_gcc.mak ファイルがあるので GNU ARM_ROOT 及び NeXTTool_ROOT を開 発環境に合わせて修正する。 5.プログラム作成・実行 ①拡張ファームウェア搭載の NXT の電源を入れ、PC と USB で接続させる。 ②Cygwin を起動させ、カレントディレクトリを nxtOSEK/samples/helloworld ディレクトリに 設定し、Cygwin 上で make を使用してサンプルプログラムなどを作成・コンパイルする。 ③Cygwin 上で./rxeflash.sh とコマンドを入力し、プログラムを NXT にアップロードする。 ④NXT 標準ファームウェアの操作手順に沿って、アップロードしたプログラムを実行する。 6.使用経験 インストールした開発環境付属のサンプルプログラムを適宜選択し、コンパイル、NXT へダウンロードしたのち実行し、所定の結果となることを確認した。 以下に、サンプルプログラムと簡単な自作プログラムの実行結果を示す。いずれも NXT に 組み込まれている LCD 表示器への表示例である。 7.結論および今後の課題 NXT 用プログラム開発環境を整備し、簡単なサンプルプログラムをコンパイル、ダウン ロードし実行させた。この過程では特に問題はなく、快適なプログラミングができた。ただ、 nxtOSEK 下で動作するアプリケーションプログラムを記述する際、アプリケーションプロ グラムそのもののほかに、NXT に関する記述ファイルを別途用意する必要があり、このフ ァイルの作成方法が明確でなかった。今後はこのファイルの記述方法に関する調査とさらな るアプリケーションプログラム開発を通じて、今回整備した開発環境の使い勝手を評価した い。 8.参考文献 (1)ET ロボコン 2008 公式サイト http://www.etrobo.jp/ (2)レゴマインドストームを用いたライントレースマシンの実機調査 齋藤 彰宏 著 2008 年度電子情報学科卒業研究・制作・購読要旨 3-C8 PSoC 接近センサーの試作 D04051 高荒 拓希 指導教員:大表良一 1、目的 PSoC による接近センサーを試作し、それにより距離やセンサーに触れるものを変え てセンサーがどのように変動するかを調べた。 2、実験手順 ①MiniDisc から I2C-USB GUI をインストールする ②接近検出器をブリッジボードにつなげ USB にさす ③I2C-USB GUI を起動し 3.3V に設定する ④プログラムを開き測定を開始する ⑤グラフをコピーして値をとりグラフにする 3、回路図 図 1.センサー部の回路 4、測定方法 センサーをなにも当たらないようにぶら下げ、その横にメジャーを置きメジャーに手 を合わせて近づけていく。そして、その時の値を記録する。 5、測定結果 32000 31000 30000 29000 28000 27000 26000 25000 24000 23000 図2.センサーから離した距離の平均のグラフ 離した距離 最大値 最小値 平均 差 ペンチで配線 30366 30350 30358 16 配線を強く 31130 30960 31045 170 配線を弱く 30400 30195 30297.5 205 配線周りを強く 27784 27765 27774.5 19 配線周りを弱く 27032 27008 27020 24 5cm 26050 26039 26044.5 11 10cm 25996 25983 25989.5 13 20cm 25953 25942 25947.5 11 30cm 25942 25938 25940 4 40cm 25937 25925 25931 12 50cm 25935 25920 25927.5 15 1m以上 25935 25920 25927.5 15 図3.センサーからの距離とその時の値 他にも、配線の長さを変えたり増やしたりプラスティックなども近づけたりしてみた が通常時と変わらなかったためグラフおよび表は省略しました。 以上の結果から圧力の差によって最大値と最小値の差が大きくなることがわかった。 また、距離によっての差は多少の変動はあるがほぼ一定であることがわかった。 6、おわりに 今回研究を始めるのが遅くなってしまったため測定までしか行うことができなかっ たが、これを応用すれば人体のインピーダンスや静電容量も測定可能ではないかと思 われる。 2008 年度 電子情報学科 卒業研究・制作・講読 要旨 3-C9 PSoC マイコンを利用した距離測定器の試作 D05008 大関 裕貴 1. はじめに 1.1 目的 簡単に距離を測れる物はないだろうか 担当教員:大表 良一 した後、発生したときからの遅れ時間を測 定すればよいということになる。音速を 340m/s とすると、1cm 当たり約 29μs か と考え、昨年学んだ PSoC マイコンを使用 かることになる。つまり 1cm 離れると往復 し超音波を発生させそれを用いて距離を計 で 2cm 分、すなわち約 58μs 遅れて音が返 測し、研究を進める中でワンチップ・マイ ってくる事になる。これを利用し距離の計 コンについて学び、知識を深める。 算を行う。 1.2 PSoC について PSoC(Programmable System-on-Chip:ピーソック)とは、従来 さらに超音波の発生後、反射到達までの時 間計測の部分を論理演算機能を使って自動 化し、CPU に与える負荷を減らす。 のワンチップ・マイコンの周辺機器(アナ 3.3 研究の流れ ログ・ディジタル回路)をある程度自由に 1)プロジェクトを作成 変更できるワンチップ・マイコンである。 2. 使用機器 一番最初の画面で Start new project を選 び、次の画面で左側に Create new project ・PsoC Designer:開発環境 となっていることを確認しプロジェクトに ・CY8C27443-24PXI:PsoC デバイス 任意で名前をつける。 ・抵抗 470Ω 10kΩ そして次の画面に進むと、次はプロジェク ・超音波センサ(スピーカー・マイク) トで使用するデバイスの指定である。ここ ・コンデンサ 0.1μf では自分の使うものを指定する。 ・LM35(温度補正) 2)デバイスエディタのセレクション画面で ・30cmキャリブレーションスイッチ 使用するユーザーモジュールを選定。 ・基盤 3. 研究内容 3.1 研究課題 CPU に負荷を与えないような回路設計 を心がけ、尚且つ温度による超音波の進 む距離の誤差を計算しつつ、実距離との 誤差を 5%以内に収める。 3.2 距離測定の考え方と負荷軽減の考え方 図 1 セレクション画面 超音波をごく短い時間発生させて、超音 3)デバイスエディタのインターコネクト画 波が反射してマイクで拾われ、増幅、整形 面で 2)で選択したモジュールを配置。 表 1 実験結果 単位:mm 実距離 測定値 測定値 (図 4) (図 5) 図4で 図5で の誤差 の誤差 (%) (%) 100 116 94 1.6 0.6 200 182 157 1.8 4.3 図 2 インターコネクト画面 300 290 268 1 3.2 4)デバイス全体のパラメーターや、モジ 400 407 377 0.7 2.3 ュール間、ピンとの間の結線などを設定。 500 503 480 0.3 2 5)結線が終了したら、Config→Generate 600 606 577 0.6 2.3 700 716 687 1.6 1.3 800 822 792 2.2 0.8 900 931 895 3.1 0.5 1000 1032 1003 3.2 0.3 1100 1135 1108 3.5 0.8 1200 1236 1212 3.6 1.2 1300 1343 1321 4.3 2.1 1400 1458 1425 5.8 2.5 1500 1551 1508 5.1 0.8 Application でソースコードを発生させ る。 6)アプリケーションエディタでユーザー 独自のコードを記述する。 5. 図 3 プリケーションエディタ画面 7)Build して書き込みファイルを生成。 8)MiniProg でフラッシュメモリに書き込 む。 4. おわりに 最初に決めた目標である誤差 5%以内を概 ね達成しているので、正常に動作している といえる。しかし、1000mm 以上では誤差 が 5%以上出てしまうことがあったので、今 後の課題は距離が 1000mm 以上でも精度 結果 下の図 4 のように実験した。 又図 5 のように両脇に壁が無い状態で、測 定値が変わるかどうかも調べた。測定した 結果を表1に示す。 を 5%以内に収めることである。又表1を見 ると図 5 の壁なしの結果がよく見えるが、 実際には表示が 0mm や 2000mm 以上と表 示されてしまい、不安定な動作をしてしま った。その点に関しても改良が必要である。 6. 参考文献 (1)桑野雅彦 「はじめての PSoC マイコン」 図 4 壁あり 図 5 壁なし CQ 出版社 2008 年度 電子情報学科 卒業研究・制作・講読要旨 3-C10 PSoC を使用した CapSense の動作実験 D05011 大山誠史 指導教員 大表良一 1 目的 5 実験手順 ディジタル信号・アナログ信号処理ができる 開発環境 PSoC Express を PC にインストール PSoC デバイスを使用した CapSense ボードが して最初にプロジェクトを作成し、デバイス 有している機能を実現する過程を通して、 ビュのセレクション画面から Slider と LCD PSoC デバイスと開発環境の使用方法を学ぶ。 と Properties と I2C Slave の 4 つのドライ バを選択して配置し、相互接続してプログラ 2 概要 ムを作り、ビルドの後 PC と CapSense ボード CapSense とは、Capacitive Sensing の略称 を MiniProg でつなぎ、プログラムをダウン のことで PSoC デバイスを使ってタッチ セ ロードし実行する。 ンス式のボタンのオン/オフ、スライダー位 置の認識ができ結果等の表示のための LCD を持つ評価用システムである。 6 各ドライバの説明 1)Slider このドライバはボード上のスライダー部分 3 使用器具 におかれた指の位置の静電容量値を解析し、 PSoC Designer 5 :開発環境 位置に対応した0から100の数値に変換 CapSense ボード する。 USB ケーブル MiniProg 2)LCD このドライバは2行16桁の指定された位 置に10進数の値を実装されている液晶画 4 使用器具の説明 1)CapSense ボードについて 面に表示させる。 3)Properties LCD やスライダーと PSoC デバイスなどの機 このドライバは、PSoC デバイスのクロック 能が実装されており、静電容量変化を利用し 周波数や電源電圧などの基本設定をする。 て様々な機能の実現と性能評価を行うこと ができる。 4)I2C-Slave このドライバは、USB インタフェースを使っ て外部にデータを送るためのドライバであ 2)MiniProg について PC 上の開発環境で作成したプログラムを PSoC 内部のフラッシュメモリに書き込むた めに使用する。 る。 図1この実験で作成した PSoC の構成図 図4 結果3 7 実験結果 プログラムの開始時の LCD 表示を図2 に示す。 図5 結果4 図3、図4、図5のように0から100 までスライダー位置に対応する数を LCD 図2 結果1 そして、スライダー部分を指で左から右 へなぞると 液晶画面に表示させることができた。 8 考察 静電容量を計測し位置情報を検出、確定 する機能を非常に簡単な手順で実現す ることができた。今後の課題として、次 の2項目を解決したい。 (1) 表示画面について もし数を文字に変換できるドライバが あれば、LCD 液晶画面に文字を表示させ ることができると考えられる。 図3 結果2 (2)表示させる数について この実験では、LCD 液晶画面が16ビッ トまでしか表示できないので、難しいと 思うが拡張することができれば多くの 数字を表示させられると考えられる。
© Copyright 2026 Paperzz