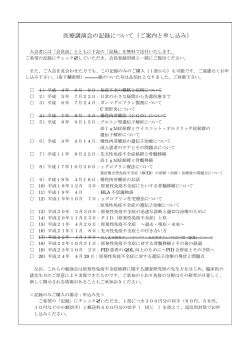
北海道立工業試験場報告 No.298 ロバスト・モデルマッチング法による 1 リンクアームの位置決め制御 中西 洋介 Verification fo accuracy of Position Control by Robust Model Matching Method Yohsuke NAKANISHI 抄 録 質量の大きく異なるワーク搬送時における 1 リンクアームの位置決め制御実験を通して,システムのパラ メータ変動に頑健であると謳われているロバスト・モデルマッチング法 1) の実用性の検討を行った結果,同 手法にて約 20 倍の慣性モーメント変動に影響されることなく,一定の位置決め制御性が得られることが確 認できた。なお,補償器設計簡略化のため,1 リンクアームをモータ等のダイナミクス,摩擦等の非線形項 を無視した簡便な線形 2 階常微分方程式でモデリングし,同近似モデルを元にロバスト・モデルマッチング 補償器を設計したところ,実用上問題の無い制御性能が得られることが確認できた。 また,センサべ−スの角速度情報に高周波数振動成分が含まれ,その結果アームの位置決め性に悪影響を 及ぼしたため,最小次元観測器にて推定した角速度をロバスト・モデル マ ッチング補償器の状態 フ ィ ード ッ バ ック情報として利用したところ,安定した位置決め制御性を得ることができた。 御補償器そのものはパラメータ変動に対するロバスト性を有 していないため, 1 .はじめに (1)予 め 予 想 さ れ る パ ラ メ ー タ の 変 動(2 リ ン ク ア ー ム の 上 1 リンクアームにて質量の異なるワークをある目的の位置 腕部駆動モータ軸に関するモーメント等)に対しては,そ に搬送する場合,アームに比して搬送ワークの質量が大きく の 時 々 に 応 じ た PID ゲ イ ン テ ー ブ ル を 予 め 用 意 し て お 変動すると,一般的な制御手法では一定の位置決め制御性を 得ることができない。制御対象のパラメータ変動に影響され く。 (2)異 な る 質 量 の ワ ー ク 搬 送 等 の 予 測 不 可 能 な パ ラ メ ー タ 変 ず に 所 用 の 制 御 性 能 を 得 る こ と が で き る 制 御 手 法 と し て は, 動 に 対 し て は, 搬 送 可 能 な ワ ー ク 質 量 の 最 大 値 に 比 し て H インフィニティ制御に代表されるロバスト制御,逐次制御 アーム質量を十分大きくし,近似的にパラメータ変動を無 対 象 の パ ラ メ ー タ を 計 算・ 更 新 し て ゆ く STR に 代 表 さ れ る 視する。 適応制御等 々 ,様々な制御手法が報告されている。ここでは , 等の対策をとっている。したがって,市販のロボットアーム これらシステムのパラメータ変動に対して頑健な制御手法の の大半は,搬送可能なワーク最大質量に対して大きな質量を 内 ,田川が考案したロバストモデルマッチング法 1) に着目し , 有しているのが現状である。 同手法の実用性の検討を行った。 本手法のようなロバスト性を有する位置決め制御補償器に 1 リ ン ク ア ー ム の 位 置 決 め 制 御 に 関 し て い え ば, そ の 代 表 よりアームの位置決めを行えば, 的な応用例として,ロボットアームによるワークの搬送作業 (1)アーム質量を小さくできる(小型・軽量化) が 挙 げ ら れ る。 こ の 場 合 の 制 御 補 償 器 と し て は 現 在 PID 制 (2)駆動モータの出力を小さくできる 御 補 償 器 が 広 く 一 般 的 に 使 用 さ れ て い る。 し か し,PID 制 等の利点を得ることができ,それに伴い製造およびランニン ̶1 0 1̶ 北海道立工業試験場報告 No.298 グコストの 低 減,ま た,現 場 における安 全 性 の 確 保 等 の メ リ (2) 状 態 フ ィ ー ド バ ッ ク に よ り モ デ ル マ ッ チ ン グ 補 償 器 を 構 ットを得ることが期待できる。 築する なお,現場に本手法を適用することを想定した場合,その (3) 観 測 可 能 な 状 態 量 お よ び 操 作 量 よ り パ ラ メ ー タ 変 動 に 対 設計手法は簡便であるに越したことはない。したがって,こ こ で は 制 御 対 象 を 表 現する微 分 方 程 式 の 次 数を高 々 2 次 に 抑 応する「等価外乱」を定義する。 (4) 等 価 外 乱 か ら 制 御 量 ま で の 伝 達 関 数 が 零 と な る よ う に ロ え,線形 2 階常微分方程式にて表現された 1 リンクアームに バスト補償器を設計する ロバストモデルマッチング法を適用することにより実用上問 (5)(4) で 設 計 さ れ た ロ バ ス ト 補 償 器 は 一 般 に 高 次 の 微 分 器 か 題なく位置決め制御を行うことができるかどうか検討するこ ら構成されるため,そのままでは実現不可能である。した とにした。なお,微分方程式の係数となる慣性モーメントお がって微分器の次数分ローパスフィルタを挿入し,ロバス よび粘性係数は,簡便な周波数応答実験により同定した。 ト 補 償 器 を 構 築 す る( し た が っ て,ロ ー パ スフィル タの カ ところで,1 リンクアームを 2 階微分方程式にて表現して ットオフ周波数以下の周波数帯域にて希望する制御性能を 状 態 フ ィ ー ド バ ッ ク を 施 し た 場 合,角 度 と 角 速 度 な る 2 つ の 得ることができる)。 状 態 量をフイードバックする必 要がある。 ロ バ ス ト モ デ ル マ ッチング法による位置決め制御を行うに当たって,当初セン 3. 1 リンクアームに対する 1 形ロバストモデルマッチンク サ情報により角速度を得ていたが,場合によっては角速度情 制御補償器の設計 報が極めて振動的になり,その結果位置決め制御中にアーム が発散するという現象が生じた。したがって,ここでは最小 次元観測器にて角速度を推定し,その推定角速度をフイード バック情報として用いることにより位置決め制御を行うもの とした。 2 .ロバストモデルマッチング法 モデルマッチング法とは,実現させたい理想的な応答特性 を予め伝達関数として与えておき,制御対象を含めた閉ルー プ系が ,その伝達関数になるように(マッチングするように ) 制御補償器を設計する方法である。したがって,制御対象を 表す伝達関数が分かっている場合には,決まった手順にした 1 リ ン ク ア ー ム は , J, D, θ, u を そ れ ぞ れ 回 転 軸 回 り がって補償器を設計することにより,比較的簡便に理想的な の慣性モーメント , 粘性係数 , 回転角度 , 駆動トルクとして , 応答性を得ることができるため,極めて有力な制御系設計手 4 法となる。しかし,制御対象のパラメータ変動に大きく影響 される欠点を持つ。 4 4 Jθ+Dθ= u ( 式 1) な る 線 形 2 階 常 微 分 方 程 式 に 支 配 さ れ る。したがって入 力 ト 一方,ロバストモデルマッチング法は,上記モデルマッチ ルク u から , 出力角度 y までの伝達関数 Guy は ン グ 法 に,「 外 乱 か ら 操 作 量( 出 力 ) ま で の 伝 達 関 数 を 零 に す る こ と に よ り, 制 御 系 へ の 外 乱 の 影 響 を 抑 え る 」 と い う, い わ ば 外 乱 抑 制 手 法 を 取 り 入 れ た も の で あ り,以 下 の 2 点 の となる。ただし , a=D/J, b=I/J である。 特徴を持つ。 また , ここでは , 実現したい目標値 r - 出力角度 y 間の 伝達関数を , (1) 制 御 対 象 の パ ラ メ ー タ が 公 称 値(nominal value: 補 償 器 設計に使用した値)である場合には,入力から制御量まで の伝達関数は予め仮定した伝達関数に一致する。 (2) 制 御 対 象 の パ ラ メ ー タ が 大 き く 変 動 し て も, 設 定 し た 周 として , ロバスト補償器を設計した。図 2 に設計した補償器 波数帯域においては一定の制御性能を得ることができる。 の ブ ロ ッ ク 綿 図 を 示 す。 な お,( 式 3) 中 の 変 数 Z は 零 点 を 操作して応答性を調整するためのものである。 図1にロバストモデルマッチング補償器の構成を示す。同 補償器を設計するに当たっては, 以 下 の 手 順 を 踏 む[1]。 (1) 実現したい目標値−出力間の伝達関数を決める ̶1 0 2̶ 北海道立工業試験場報告 No.298 入力信号が約 5Hz になったところで一度だけ共振現象が発 4 .周波数応答実験によるシステム同定 生し,後は周波紋が高くなるにしたがってゲインは対数軸に 1 リ ン ク ア ー ム は 理 論 的 に は,( 式 1) で 表 さ れ る 微 分 方 て直線的に減少 (4OdB/decade) する傾向が観察された。 程式して記述することができる。慣性モーメント J は計算に 次に , この実験に得られた 1 リンクアームの入出力特性 ておおよその値を算出することが可能であるが,粘性係数 D が 2 次 系 の 理 論 式 で 近 似 可 能 か 否 か 考 察 す る。2 次 系 の 閉 の値は実験にてその値を同定するしかない。したがって,こ ルー プ 伝 達 関 数 は , ωn を 系 の 固 有 角 振 動 数 , ζ を 減 衰 係 数 こでは簡便な周波数応答実験を行うことにより,粘性係数 D として , の値を同定することを試みた。 4.1 閉ループ伝達特性 で 標 準 化 さ れ る。( 式 4 ) で 表 さ れ る 周 波 数 伝 達 関 数 の 周 波 数 f におけるゲイン| G(jω) |は , と な る。 図 4 中 の「・ 印」 は , ( 式 5) に お い て f n = 4.9Hz ( ωn = 2πfn ) , ζ = 0.05 と し て 計 算 し た 時 の 2 次 系 閉 ル ー プ 伝 達 特 性 の 理 論 値 を 出 す。 図 4 よ り,図 3 点 A∼C 間 の閉ループ伝達特性と理論式 ( 式 4) で表される伝達特性は , 比 較 的 良 い 一 致 を 示 し て い る こ と が 分 か る。 す な わ ち , 本 実 験における 1 リンクアームの閉ループ伝達特性は , 1∼ 25Hz の 周 波 数 帯 域 で は , 理 論 式 に て , fn = 4.9Hz, ζ = 0.05 とすることにより近似可能であることが確認できた。 図 3 に 1 リンクアームのシステム同 定 実 験 装 置 の ブ ロ ッ ク 線図を示す。アームはトルク制御型ドライバで駆動される D 4.2 パ ラメータ推定 C モ ー タ に て , 減 速 比 i=3 な る プ ー リ を 介 し て 駆 動 し , ア ー ( 式 4) で表現される 2 次系の開ループ伝達関数は , ム回転角はポテンショメータ(電圧出力)にて測定した。実 験 は , 図 3 の 点 A で 表 さ れ る 信 号 入 力 点 に , 1Hz か ら 25Hz の周波数の正弦波を入力信号として与え,点 C での出力正弦 波を測定するという手順で行った。図 4「○印」にて得られた となる。一方 , 実験における開ループ伝達関数 G B C(点 B ∼ C 閉ループ伝達特性 ( ボード線図 ) を示す。 間の伝達特性 ) は,図 3 より ̶1 0 3̶ 北海道立工業試験場報告 No.298 となる。ただし,K ,Km ,Kp はそれぞれ,差動増幅器の設 定ゲイン,モータドライバ入力端子電圧∼アーム駆動軸トル ク間ゲイン,アーム角度∼ポテンショメータ出力電圧間ゲイ ン で あ り, K=1.75( 手 動 に て 設 定 ), Km=3.88×10 - 2 Nm/V( カ タ ロ グ 値× 減 速 比 ),Kp=8.58V/rad( 実 測 ) で あ る。 理論値および実験値での閉ループ伝達特性がほぼ同じこと か ら,( 式 6) と( 式 7) を 等 値 す る こ と に よ り, 慣 性 モ ー メント J および粘性係数 D を求めることができる。すなわち , K K m K P / J =( 2 π f n )2 , D / J = 2 ζ ω n よ り , J=6.15×10 - 4 kg・m 2 , D = 1.89×10 - 5 Nms と なる。 同定結果の確認のため,手計算によりアーム部(モータに より駆動される全慣性)の慣性モーメントを概算すると,約 J 1 = 7.2×10 - 4 kg・m 2 となった。 多 少 の 誤 差 は あ る も の の,J ≒ J 1 と な る こ と か ら, 今 回 のシステム同定方法によって推定された粘着係数 D の値に も,信頼がおけるものとした。 4.3 考祭 本 節 の 実 験 に て, 「1∼25Hz の 周 波 数 帯 域 」 に て 1 リ ン ク アームを(式 1)の 2 階微分方程式にて近似表現可能である ことが確認できた。しかし,図 3 から分かるように,1 リン クアームを実際に駆動するためには,モータ,モータドライ バ,動力伝達機構(減速機・プーリ等)等を必要とする。し たがって,1 リンクアームをより正確にモデリングするため には, 5, 位置決め制御実験 (1) モ ー タ ダ イ ナ ミ ク ス 等 の 3 次 以 上 の 高 次 モ ー ド に 対 応 す 5.1 る動特性 実験方法 図 5 に実験に使用した 1 リンクアーム , 図 6 に実験の概念 (2) 摩擦,時間遅れ等に代表される非線形性 図を示す。 ア ー ム は タ イ ミ ン グ ベ ル ト を 介 し て 8W の DC モ ー タ に て 等 の,線 形 2 階 常 微 分 方 程 式 で は 記 述 で き な い 動 特 性 を 考 慮 駆動した。アーム位置は 1000 パルスのロータリエンコーダ する必要がある。(1)については,4 次程度のモードまでを に よ り 検 出 し , ア ー ム 速 度 ( 角 速 度 ) は ロ ー タリエ ン コ ー ダ 考慮したロバストモデルマッチング補償器も構築可能である からの出力パルスを F/V 変換した。 が,それ以上のモードまでを考慮すると補償器の設計が複雑 ロ バ ス ト 補 償 器 は , こ の よ う に し て 得 ら れ た「 位 置 情 報」 になり現実的ではない。(2)についても,その数学的取り扱 お よ び 「 速 度 情 報」 と , い が 極 め て 困 難 で あ り,1 リ ン ク ア ー ム を 記 述 す る 数 学 モ デ を も と に , 適 切 な 演 算 を 施 し , 駆 動 源 で あ る モ ー タ に「 駆 動 ルにそれを組み入れることは事実上困難である。 命 令」 を 与 え る ( な お , 補 償 器 自 ら 演 算 し た「 駆 動 命 令」 も, 制御補償器を設計する立場から言うと,簡単な補償器で安 演算の情報として使用する ) 。 定した位置決め制御性が得られるのであれば,わざわざ数学 的取り扱いが困難である上記動特性を考慮する必要はない。 パ ソ コ ン に て 設 定 す る「 位 置 指 令」 実 験 は , 質 量 約 20g の ア ー ム 先 端( 回 転 中 心 よ リ 80mm) に, したがって,本稿では「簡便な方法で実用的なロバストモ (a)125g (J = Jnom = 8×10 デルマッチング報償器を構築することが可能か」というスタ (b)26g (J = 0.2Jnom) ンスに立ち,1 リンクアームを 2 階の微分方程式にて近似す (c)281g (J = 2.25Jnom ) ることで,どこまで安定した位置決め制御性を得ることがで (d)484g (J = 3.9Jnom ) きるか碓認することにした。 ̶1 0 4̶ -4 kg・m :基準値 ) 北海道立工業試験場報告 No.298 な る 4 種 類 の 質 量 の お も り を 取 り つ け て , 90 度 お も り を 搬 一方,ロバスト制御時においては,経路 AB・BC ともに同 送する時の位置決め制御化を碓認することにより行った。ま 様の波形,つまり経路に関係なく一定の位置決め制御性が得 た , おもりは図 6 中の られていることが分かる。つまり,ベルトの片当たり等を一 種の「負荷変動」と考えると,ロバスト補償器はこの負荷変 (ア) A 点 → B 点 動に対してロバスト性(頑健性)を発揮していると判断でき (イ) B 点 → C 点 る。 なる二通りの経路にて搬送した。 なお , ロバスト制御と比較するために , 一般的な方法であ るPID制御による実験も行った。PID制御補償器は,そ の設計パラメータとして 3 つの値を持ち , その 3 つの値を調 整するだけで , 最適な制御性を得ることができる制御方式で あ る。3 つ の 値 の 調 整 方 法 は , い わ ば「 試 行 錯 誤」 的 に な る ものの , 専門的な制御理論の知識が無くても誰でも簡単に使 用することができるため , 現在最も一般的に使用されてい る。 本実験においてはPID制御の設計パラメータである 3 つ の 各 ゲ イ ン を (a) の 125 g の お も り 搬 送 時 に 最 適 な 位 置 決 め 制 御 性 が 得 ら れ る よ う に 調 整 し た。 ま た , ロ バ ス ト 補 償 器 に お け る 設 計 パ ラ メ ー タ と も い え る 慣 性 モ ー メ ン ト J, 粘 性 係数 D の公称値も同様に , (a) 125g の お も り 搬 送 時 の も のとした。 5.2 実験結果 実 験 結 果 を 図 7(a) ∼ (d) に 示 す。 図 に お い て 横 軸 は 時 間 ( 秒 ) を , 縦軸は角度 ( 度 ) を表す。なお , 例えば「PID (AB)」 と は, 「 経 路 AB に 沿 っ て PID 制 御 を 施 し た」 こ と を 示す。 5.2.1 稼働中の負荷変動に対するロバスト性 ま ず , 波 形 の 滑 ら か さ に つ い て 考 察 す る。PID 制 御 時 に お いては , (a) ∼ (d) のいずれについても言えることだが , 搬送 経 路 AB・BC に よ っ て 波 形 ( 挙 動 ) が 大 き く 異 な り, 特 に 慣 性 モー メントが小 さい (b) において は, 搬送途中で 数 回 停 止 してしまっていることが分かる。これは , ① ピ ッ チ (5mm) に 比 し て , 小さいピッチ円 直 径 (18mm) の タ イミングプーリを使用したため ( 図 6 参照 ) ,回転位置に より歯の噛み具合が異なること ( 稼働中の負荷変動 ) 。 ② 2 つのプーリ間の垂直位置が微妙に異なることにより , ベ ルトがフランジに片当たりしてしまったこと。 ③実験装置全体が小型で,駆動トルクが小さいため , ① , ② の影響を大きく受けてしまったこと。 等 が 原 因 と し て 考 え ら れ る。 こ の こ と は , 慣 性 モ ー メ ン ト が 一 番 小 さ い (b) に お い て 波 形 が 階 段 状になっているが , (b) → (a) → (c) → (d) と慣性モーメントが大きくなり , 慣性力・モー タトルクが大きくなっていくにしたがって波形がなめらかに なっていることからも確認できる。 ̶1 0 5̶ 北海道立工業試験場報告 No.298 5.2.2 パ ラメータ(慣性モーメント)変動 測器を設計するためにはロバスト補償器同様 , 観測したい対 に対するロバスト性 象 の 精 度 良 い 「 数 式 モ デ ル」 を 必 要 と す る。4.3 節 で の 議 論 次に,異なる質量のおもり搬送時におけるアーム位置決め 同 様 , 1 リ ン クアームを線形 2 階常微分方程式のみで表現し 性について考察する。まず PlD 制御について論ずる。 (b)20g た場合でも精度良く推定値が得られるかどうか確認すること のおもり搬送時は,プーリ歯の噛み具合等が原因と思われる も , 実用上興味ある問題である。 一 時 的 な 高 負 荷( 片 当 た り ) の た め, 時 間 に し て 0.2 ∼ 0.3 秒付近で一端停止しているが,そこで停止するまでは基準で 6.1 最小次元観測器の構成 ある(a)125g のおもり搬送時に比べて急激な立ちあがりを見 制御対象を , 4 せ て い る。 そ し て(c),(d)と 慣 性 モ ー メ ン ト が 大 き く な る に x = A x + B u ( 式 8) したがって,立ち上がり(搬送速度)は遅くなっている。ま の 様 に 状 態 方 程 式 で 表 現 す る。 こ こ で , A: シ ス テ ム マ ト リ た,(d) の 484g の お も り 搬 送 時 に お い て は,基 準 値 で あ る ク ス , B: 入 力 マ ト リ ク ス , x: 状 態 ベ ク ト ル , u: 入 力 で (a)125g に比べておもりが重すぎるために,目標値である 9 あ る。 さ ら に , 状 態 変 数 を 観 測 で き る も の x 1 と 観 測 で き な 0 度を大きく超えて(行き過ぎて)しまっている。その結 果, いもの x 2 とに分け , ( 式 8) を次式のように分割する。 90 度に収束するまでに多くの時間を要している。 一方,ロバスト制御においては,( b)の経路 BC を除いて, ほぼ一定の位置決め制御性が得られていることが分かる。つ ま り,質 量 20g ,長 さ 80mm のアームによる位 置 決 め 制 御 時 に お い て,お も り 質 量 の 変 動 26g ∼ 484g( 慣 性 モ ー メ ン ト ま た , 観 測 で き な い 状 態 変 数 x 2 と そ の 推 定 値_x 2 と の 偏 差 にして約 19.5 倍)に対してロバスト性を発揮していることが を, 分かる。 に対応するシステム行列 A 2 2 の固有値が好ましいものであれ (b) の経路 BC においては,途中でアームが激しく振動(発 e = x 2 , -_x 2 と す る。 こ こ で, 観 測 で き な い 変 数 x 2 ば, 散)しているが,このことに関しては次節で論ずる。 4 x 2 = A 2 2 x 2 , + A 2 2 x 2 + Bu ( 式 10) 6 .最小次元観測器による角速度推定 よ り , x 2 を 求 め る こ と が で き る。 し か し , 前節の実験にて軽量おもり搬送時に,アームが途中で激し A22 の 固 有 値 が 望ましい減衰特性を示さなければ . く振動する現象が観察された ( 図 7(b)経路 BC)。これ は, 4 e = (A 2 2 − L A 1 2 ) e ( 式 11) 「おもりが軽すぎる → プーリ歯かみ合い等の影響でアーム が微小振動する→アーム角度はロータリエンコーダにてパル なる状態方程式において , L の値を適当な値に設定すること スとして検出している→そのパルスを直接 F/V 変換して角速 に よ り , A 2 2 の 固 有 値 を 所 用 の 位 置 に 移 す こ と が で き る。 こ 度情報(電圧)を得ている→エンコーダパルスの振動が増幅 の 時 , 十 分 満 足 で き る 速 さ で e → 0 (_x 2 → x 2 ) と な る され角速度情報(電圧)が大きく振動する」 よ う に , す な わ ち L の 値 を 操 作 す る こ と に よ っ て, 推 定 値 が すみやかに真値に収束するように A 2 2 の極を配置する ことに原因があると思われる(ロバスト・モデルマッチング 補償器は状態フイードバックを元に構築されているため,状 態量の 1 つである角速度にノイズ等の振動成分が含まれると 制 御 性 が 悪 化 す る )。 す な わ ち, 軽 量 お も り 搬 送 時 に 微 振 動 を 伴 う エ ン コ ー ダ パ ル ス を「 直 接 F/V 変 換 し て」角 速 度 情 報 を得ていることに大きな原因がある。 し たがってここでは,「 最小次元観測器(オブザーバ)」に て推定した内速度情報を位置決め制御に利用することにし た。この手法は本稿のような「位置決め制御」に限らず, (ア) 高音等の劣悪な環境のためセンサが使用できない。 (イ) ノイズが多過ぎてセンサが使用できない。 等の場合に有効な手段であり,精度良く推定値を算出する観 ̶1 0 6̶ 3) 。 北海道立工業試験場報告 No.298 図 8 に 1 リンクアームに最 小 次 元 観 測 器 を 組 み 込 ん だ と き の ブ ロ ッ ク 線 図 を 示 す。 な お , 図 中 の p は ( 式 11) に お け る シ ス テ ム 行 列 A 2 2 -LA 1 2 の 固 有 値 で あ る。 具 体 的 に は , この極 p の値を調整することにより , 角速度推定値が真値に 収束する早さを調整する。 6.2 最小次元観測器の極の決定 1 リンクアームの位置決め制御において , 図 8 の構成によ る最小次元観測器の推定値を状態フィードッバック情報とし て , 十分な精度で位置決め制御可能かどうかを調べるために , 極 p の 値 をパラメータとして付 置 決 め 制 御 実 験 を 行 っ た。 な お , 設定した公称値は , a)J = 12.5×10 - 4 kg・m 2 b)D = 19.8×10 - 4 Nms である。 図 9 に 極 の 値 を (a)p =-10, (b)p =-20, (c)p =-40 と 変 化 さ せ た 場 合 の 実 験 結 果 を 示 す。 図 中 の FV 変 換 値 は 推 定 値 を 真値と比較するために示したものであり , 位置決め制御には 直接は関係していない。なお , FV 変換値は簡易な方法では あるが予めキャリブレーションを行っているため , ほぼ真値 に 近 い 値 を 示してしていると考えて良 い。したがって , 推 定 値 が ど れ だ け FV 変 換 値 に 近 い 値 と な っ て い る か が 観 測 器 の 精 度 評価の一つの指標となる。 図より , 極 p の絶対値が大きくなるにしたがって , 推定値 が 真 値 で あ る FV 変 換 値 に , よ り 早 く 収 束 し , 角 度 曲 線 も よ り 滑 ら か に な っ て い く 様 子 が 分 か る。 い ず れ の 場 合 も Odeg/sec 付 近 で 多 少 誤 差 が 大 き く な っ て い る も の の , 推 定 値 の 利 用 目 的 を , そ の 精 度 を 問 題 に す る の で は 無 く , 「1 リ ンクアームの位置決め制御における状態フィードバック情 報」 等 の 補 足 的 な 情 報 と し て 利 用 す る た め と い う 目 的 に 限 定 すれば , 最小次元観測器による推定値は十分信頼のおけるも のであることが確認できた。 ところで , 極の絶対値を大きくするということは , 応答性 FV 変 換 値 を 利 用 し た 5 節 の 実 験 で は , 軽 量 お も り 搬 送 時 ( を 挙 げ る と い う こ と で あ る。 一 般 論 と し て , 極 の 絶 対 値 を 大 J = 0.2Jnom ) に ア ー ム が 発 散 し た ( 図 7(b) 経 路 BC) 。 し きくすると , 系の応答性は改善されるが不安定 ( 振動的 ) に たがって , 角速度情報として最小次元観測器の推定値を利用 な っ て し ま う。 事 実 , 極 の 絶 対 値 が 最 も 大 き い 図 9(c) の 推 し て 軽 量 お も り を 搬 送 し て み た。 な お , 観 測 器 の 極 の 値 は 上 定 値 を 細 か く 観 察 す る と , (a), (b) に 比 べ て , や や 振 動 的 に 述の議論より p= 30 としている。図 10 にその結果を示す。 な っ て い る こ と が 分 か る。 ま た , 図 9 は慣性モーメント 図 よ り , FV 変 換 値 は 激 し く 振 動 し て い る こ と が 分 か る。 J = 12.5×10 - 4 kg・m 2 に つ い て 行 っ た 実 験 結 果 だ が , 慣 性 図 7(b) 経 路 BC の 実 験 で は , こ の 振 動 的 な FV 変 換 値 を 利 用 モー メ ン ト を そ の 0.14 倍 , す な わ ち J = 1.7×10 - 4 kg・m2 して位置決め制御を行ったためにアームが発散したものと , 思 として同様の実験を行うと , わ れ る。 一 方 , 最 小 次 元 観 測 器 よ る 推 定 値 は , p=-40 と し た と き に , や や 振 極の絶対値 動 的 に な っ た。 し た が っ て , こ こ で は p=-30 を 最 小 次 元 観 が 大 き す ぎ る た め か や や 振 動 的 に な っ て い る も の の , FV 変 測器の極の最適値とした。 換値と比較すると , 振動成分の振幅は約 1 / 3 程度に抑えら れている。推定値を利用して行った位置決め制御結果である 6.3 角速度情報の振動成分に関して 角 度 曲 線 も , 安 定 し て 90 度 に 収 束 し て い る こ と が 分 か る。 図 9 の FV 変 換 値 は 観 測 器 測 定 値 と 比 べ る と , や や 振 動 的 に な っ て い る。 そ の た め , 角 速 度 フ ィ ー ド バ ッ ク 情 報 と し て 同様の実験を複数回行ってみたが , アームが発散するという 現象は一度も観測されなかった。 ̶1 0 7̶ 北海道立工業試験場報告 No.298 め制御を行ったところ , アーム微少振動に起因する速度情 報劣化の影響が回避でき , 良好な位置決め制御性を得るこ とができた。 特 に , 1)-b) に 関 し て は , 難 解 な 現 代 制 御 理 論 の 中 で も 現 在現場において比較的広く使用されている「外乱オブザーバ」 的な機能だが , 今回実際に実験を行ってみてロバストモデル マッチング法もその機能を有することが改めて確認できた。 なお , ロバストモデルモデルマッチング法および最小次元 観測器を使用するためには , 「制御あるいは観測したい対象 の パ ラ メ ー タ 推 定 実 験 ( シ ス テ ム 同 定 実 験 )」 を 行 い , 制 御・ 観 測 対 象 を 「 数 式」 で 近 似 表 現 す る 必 要 が あ る。 機 械 装 置あるいはプラント等によっては , 同定実験を施すこと自体 に困難を伴う場合もある。しかし,同定実験を施すことが可 能 で , か つ , そ の 結 果 簡 便 な 近 似 式 で 表 現 可 能 な 機 械 装 置・ 7 .まとめ 本 稿 で は, ワ ー ク 搬 送 時 に お け る 1 リンクアームの位 置 決 プラント等に対して何らかの制御を行おうとする場合 , 本稿 め制御実験を通して,ロバストモデルマッチング法の実用性 にて述べた手法は有効な制御手法となることが期待できる。 の検討を行った。なお,ロバスト補償器を設計する当たっ て, 制 御 対 象 と な る 1 リ ン ク ア ー ム を モ ー タ 等 の ダ イ ナ ミ ク ス, 本稿では , ロバストモデルマッチング法の一つの適用例と 摩 擦 等 の 非 線 形 項 を 無 視した簡 便 な 線 形 2 階 常 微 分 方 程 式 で し て , 1 リ ン ク の み か ら 構 成 さ れ るアームの位置決め制御性 表現することで,実用上問題の無い制御性能が得られるか否 に 関 し て 考 察 し た。 し か し , 三 次 元 的 な 任 意 点 間 の 位 置 決 め か確認した。 搬送作業を行う場合 , アームは少なくとも 2 つのリンクを必 また,センサベースの角速度情報に高周波数振動成分が含 要とする ( 人間の腕も上腕および前腕の 2 リンクから成る ) 。 まれ,その結果アームの位置決め性に悪影響を及ぼしたため, 上腕リンクを駆動するモータに話を限定すると , モータ軸に 「 最 小 次 元 観 測 器 」 に て 角 速 度 を「 推 定 」 し, そ の 推 定 値 を 関する慣性モーメントは , 搬送ワーク質量によって変動する 使用したロバスト・モデルマッチング制御にて所用の制御性 だ け で な く , 腕 を 伸 ば し き っ て い る か, た た ん で い る か (2 能が得られるかどうか確認した。その結果以下の知見が得ら リ ン ク 間 の 角 度 が 鈍 角 か , 鋭 角 か ) に よ っ て も 変 動 す る。 負 れた。 荷慣性の変動要因としては , 以 上 の 2 点 が 考 え ら れ る が, 「ある程度」の負荷変動は速度情報を考慮することで対応で 1)ロバストモデルマッチング法に関して きる ( 速度フィードバックゲインの調整のみで対応できる ) 。 同手法を用いて質量 20g・長さ 80mm なるアームの位置決 市販のロボットアームの大半はこの方法で負荷慣性の変動に め制御を行った結果, 対 応 し て い る が , 本 章 で 行 っ た 実 験 の よ う に「 約 20 倍」 の a) 質量 26g∼484g のワーク搬送に対してほぼ一定の位置決 負荷変動に対して対応するのは極めて困難である。 め 制 御 性 が 得 ら れ た( 約 20 倍 の 慣 性 モ ー メ ン ト 変 動 に 対 するロバスト性が確認できた)。 今後は , ロバストモデルマッチング法による位置決め制御 を軽量 2 リンクアームに適用するにあたって , 実用上の問題 b)PID 制 御 で は 対 処 で き な い 位 置 決 め 制 御 中 の 負 荷 変 動 に 点があるか否か検討を進めていきたい。 ほとんど影響されること無く,一定の位置決め制御性を得 ることができた。 参考文献 C)1 リ ン ク ア ー ム を モ ー タ の ダ イ ナ ミ ク ス,摩 擦 等 の 非 線 形 1) R.Tagawa : Robust Model-Matching HUC2. Vol.1, 項 を 無 視 し た 線 形 2 階 常 微 分 方 程 式 で 近 似 し て,ロ バ ス ト 補償器を設計したところ,実用上問題の無い制御性能が得 No.1, pp.1-13, 1987. 2) K. Ichikawa:Control system design based on exact られた。 model matching techniques, Springer-Verlag ,1974. 2)最小次元観測器に関して 1 リンクアームを線形 2 階常微分方程式で表現し,同観測 3) 増淵正美:システム制御,コンピュータ制御機械システムシリーズ 4, 器にて速度を推定したところ, コロナ社 , 1994 a)比較的良好な制度で速度情報を推定することができた。 4) 古田勝久他:メカニカルシステム制御,オーム社 , 1990 b) 同 推 定 値 を 基にロバストモデルマッチング法 に よ る 位 置 決 5) 上滝到孝他:電気学会大学講座自動制御理論,電気学 会, ̶1 0 8̶ 北海道立工業試験場報告 No.298 1992 6)吉川恒夫他:現代制御理論,昭光堂,1995 7)新誠一:制御理論の基礎,昭光堂,1996 ̶1 0 9̶
© Copyright 2026 Paperzz