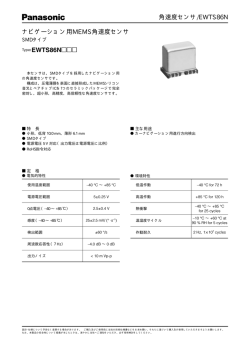
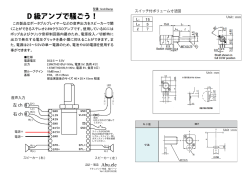
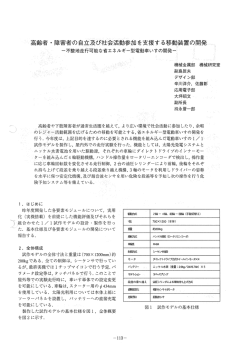
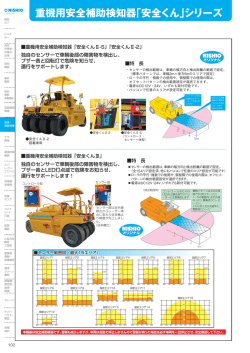
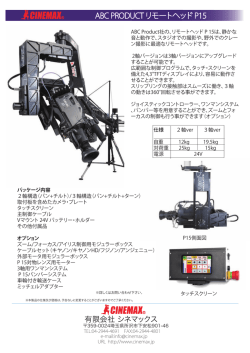
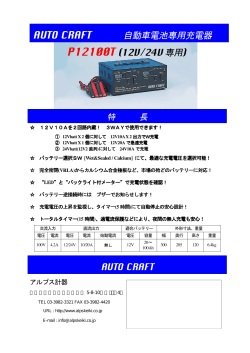
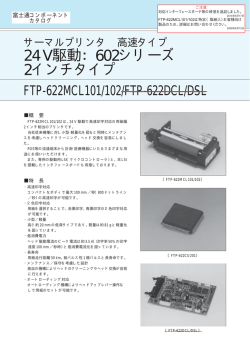
RCX240/RCX221/RCX222 ヤマハロボットコントローラ SR1-X/SR1-P CEマーキング 補足説明書 JAPANESE ヤマハ発動機株式会社 IM事業部 ロボットビジネス部 〒435-0054 静岡県浜松市中区早出町882 TEL 053-460-6103 J120-Ver. 1.00 JXX111C100 J 総目次 はじめに i 安全の手引き 1. 安全表記について 1 2. 特に重要な注意事項 2 2.1 設計上の注意事項… ………………………………………………………………………… 2 2.2 設置上の注意事項… ………………………………………………………………………… 2 2.3 配線上の注意事項… ………………………………………………………………………… 3 2.4 立ち上げ・保守上の注意事項… …………………………………………………………… 3 2.5 ロボット動作時の注意事項… ……………………………………………………………… 4 2.6 廃棄時の注意事項… ………………………………………………………………………… 4 3. ロボットに対する安全対策 5 3.1 スカラ型ロボットに対する安全対策… …………………………………………………… 5 3.2 単軸、直交型、ピック&プレイス型ロボットに対する安全対策…………………………………… 5 4. モータの過負荷対策 5 5. 警告表示 5 5.1 警告ラベル… ………………………………………………………………………………… 5 5.2 警告マーク… ………………………………………………………………………………… 6 6. 産業用ロボットの特別教育 6 7. 日常点検・定期点検の実施 6 8. ロボットの設置 ・ 使用に関する主な法令 ・ 規格 7 第 1 章 CEマーキングについて 1. CE マーキング対応 1-1 2. 安全規格 1-2 2.1 EC 指令の適合に対する注意事項……………………………………………………………1-2 2.2 CE マークについて……………………………………………………………………………1-2 2.3 適用した指令とその関連規格… ……………………………………………………………1-3 2.4 CE マーキング対象ロボット… ……………………………………………………………1-3 2.5 EU 加盟国公用語対応に関する注意…………………………………………………………1-3 3. 使用条件 1-4 第 2 章 RCXシリーズ 1. システムの概要 1.1 2-1 システム概要… ………………………………………………………………………………2-1 1.1.1 主なシステム構成………………………………………………………………………………………… 2-1 1.2 コントロールシステム構成… ………………………………………………………………2-3 1.2.1 基本構成…………………………………………………………………………………………………… 2-3 1.2.2 電源および非常停止系回路構成………………………………………………………………………… 2-6 1.3 プログラミングボックス(RPB-E)…………………………………………………………2-7 1.3.1 各部の名称と機能………………………………………………………………………………………… 2-7 1.3.2 RPB コネクタ……………………………………………………………………………………………… 2-8 1.4 サービスモード… ………………………………………………………………………… 2-10 1.4.1 サービスモードとは…………………………………………………………………………………… 2-10 1.4.2 サービスモードの機能を有効にするための流れ…………………………………………………… 2-11 1.4.3 サービスモードのパラメータ設定…………………………………………………………………… 2-11 2. EMC 対策例 2.1 2-13 RCX240… ………………………………………………………………………………… 2-13 2.1.1 構成……………………………………………………………………………………………………… 2-13 2.1.2 対策部品………………………………………………………………………………………………… 2-14 2.2 RCX221/RCX222… ……………………………………………………………………… 2-18 2.2.1 構成……………………………………………………………………………………………………… 2-18 2.2.2 対策部品………………………………………………………………………………………………… 2-19 3. 外部安全回路例 3.1 2-22 パフォーマンスレベル… ………………………………………………………………… 2-22 3.2 RCX240 回路例… ………………………………………………………………………… 2-23 3.2.1 3.2.2 3.2.3 3.2.4 カテゴリ 4……………………………………………………………………………………………… カテゴリ 3……………………………………………………………………………………………… カテゴリ 2……………………………………………………………………………………………… 回路動作概略…………………………………………………………………………………………… 3.3 RCX221/RCX222 回路例………………………………………………………………… 2-29 3.3.1 3.3.2 3.3.3 3.3.4 カテゴリ 4……………………………………………………………………………………………… カテゴリ 3……………………………………………………………………………………………… カテゴリ 2……………………………………………………………………………………………… 回路動作概略…………………………………………………………………………………………… 2-25 2-26 2-27 2-28 2-31 2-32 2-33 2-34 第 3 章 SR1シリーズ 1. システムの概要 1.1 3-1 システム概要… ………………………………………………………………………………3-1 1.1.1 主なシステム構成………………………………………………………………………………………… 3-1 1.2 コントロールシステム構成… ………………………………………………………………3-2 1.2.1 基本構成…………………………………………………………………………………………………… 3-2 1.2.2 電源および非常停止系回路構成………………………………………………………………………… 3-3 1.3 プログラミングボックス(HPB-D)…………………………………………………………3-4 1.3.1 各部の名称と機能………………………………………………………………………………………… 3-4 1.3.2 HPB コネクタと HPB-D セイフティ用コネクタ… …………………………………………………… 3-5 1.4 サービスモード… ……………………………………………………………………………3-6 1.4.1 サービスモードとは……………………………………………………………………………………… 3-6 1.4.2 サービスモードの機能を有効にするための流れ……………………………………………………… 3-6 1.4.3 サービスモードの安全制御について…………………………………………………………………… 3-7 2. EMC 対策例 2.1 3-8 SR1… …………………………………………………………………………………………3-8 2.1.1 構成………………………………………………………………………………………………………… 3-8 2.1.2 対策部品…………………………………………………………………………………………………… 3-9 3. 外部安全回路例 3-12 3.1 パフォーマンスレベル… ………………………………………………………………… 3-12 3.2 SR1 回路例… ……………………………………………………………………………… 3-13 3.2.1 3.2.2 3.2.3 3.2.4 カテゴリ 4……………………………………………………………………………………………… カテゴリ 3……………………………………………………………………………………………… カテゴリ 2……………………………………………………………………………………………… 回路動作概略…………………………………………………………………………………………… サービス依頼票 3-15 3-16 3-17 3-18 はじめに このたびは、ヤマハロボットコントローラ RCX240/RCX221/RCX222/SR1-X/SR1-P をお買い上げいただき まして誠にありがとうございます。 本書は、RCX240/RCX221/RCX222/SR1-X/SR1-P に対する CE マーキングへの対応に関する内容を記載して おります。RCX240/RCX221/RCX222/SR1-X/SR1-P を欧州域内へ出荷もしくは欧州域内で使用する場合には、 必ず本書を熟読いただき、正しくコントローラをお使いください。 なお、本書は CE マーキングへの対応に関する内容のみを記載しております。操作方法やプログラミング方法等 に関しては各コントローラの取扱説明書をお読みください。 本書をお読みになった後も、必要事項を随時参照できるように、安全で取り出しやすい場所に置いてご使用く ださい。 ・ 本書はロボット本体およびコントローラ本体と対になって備え付けられるべきものです。 ・ ロボットおよびコントローラの移設、譲渡、売却の際は、必ず本書も添付し、新しい受け入れ先にこれを熟読するように説 明してください。 ・ 標準以外の仕様で本書に特に説明がない場合は、標準仕様の説明を参照してください。 ・ コントローラの具体的な操作については、ご使用になるロボットコントローラの取扱説明書を参照してください。 ご 注 意 ◆本書の内容は将来予告なしに変更することがあります。 ◆本書の内容については、万全を期しておりますが、万一誤り、不明点、お気付きの 点がありましたら、ご連絡ください。 IM 事業部 ロボットビジネス部 TEL 053-460-6602 ( 営業) TEL 053-460-6169 ( サービス) FAX 053-460-6811 i 安全の手引き 目次 1. 安全表記について 1 2. 特に重要な注意事項 2 2.1 設計上の注意事項 2 2.2 設置上の注意事項 2 2.3 配線上の注意事項 3 2.4 立ち上げ・保守上の注意事項 3 2.5 ロボット動作時の注意事項 4 2.6 廃棄時の注意事項 4 3. ロボットに対する安全対策 5 3.1 スカラ型ロボットに対する安全対策 5 3.2 単軸、直交型、ピック&プレイス型ロボットに対する安全対策 5 4. モータの過負荷対策 5 5. 警告表示 5 5.1 警告ラベル 5 5.2 警告マーク 6 6. 産業用ロボットの特別教育 6 7. 日常点検・定期点検の実施 6 8. ロボットの設置 ・ 使用に関する主な法令 ・ 規格 7 1. 安全表記について 本製品のご使用に際しては、本書および関連する取扱説明書をお読みいただくと共に、安全に対して充分注意 をはらって、正しく取り扱いをしていただくようにお願いいたします。 本書で示す注意事項は、本製品に関するものについて記載したものです。お客様がヤマハロボットを組み込ん だ最終製品としての安全上のご注意に関しては、お客様にてご考慮頂きますようお願いいたします。 産業用ロボットは、高度にプログラミング可能な機械であり、動作上の大きな自由度をもっています。ヤマハ ロボットおよびコントローラを安全に正しくご使用いただくために、この章に載せられた安全に関する指示や 注意に必ず従ってください。もし必要な安全対策を怠ったり、誤った取り扱いをした場合は、ロボットおよび コントローラの故障や損傷を招くばかりでなく、使用者 ( 据付者、運転者、または調整 ・ 点検者など ) のケガ や死亡も含む重大な事故につながりかねません。各章の注意事項も厳守してください。 本書では、注意事項や要点を下記のマークを付けて説明しています。 w 危険 この表示の注意事項を守らないと、極めて危険な状況が起こり、死亡または重傷を負う可能性があります。 w 警告 この表示の注意事項を守らないと、死亡または重傷を負う可能性があります。 c 注意 この表示の注意事項を守らないと、傷害を負ったり、物的損害やデータの損失などの可能性があります。 n 要点 ロボットの操作手順を、簡潔にかつ、明確に記載しています。 ヤマハロボットおよびコントローラの設置、操作および調整にあたっては以下のいずれかの方法を必ず取り、 各取扱説明書を速やかに閲覧できるようにしてください。 1. 書籍版取扱説明書(有償)を手元に置いて設置・操作・調整を行う。 2. CD-ROM 版取扱説明書の内容をパソコンで表示させながら設置・操作・調整を行う。 3. 必要と思われる箇所を事前に CD-ROM 版取扱説明書から抜粋し、プリントアウトした物を手元に置いて 設置・操作・調整を行う。 ヤマハロボットおよびコントローラを安全に正しくご使用いただくために、安全性に関する規則、指示に必ず 従ってください。 この補足説明書にすべての安全に関する項目を記述することは困難です。したがって、使用者自身の安全に対 する正しい知識と的確な判断が非常に大切な要素となりますことをご留意ください。 1 安全の手引き 安全の手引き 2. 特に重要な注意事項 ロボットおよびコントローラの全般にわたる特に重要な注意事項を以下に示します。また本書の各章にも注意 事項が記載されています。これら注意事項も必ず守ってください。 2.1 w w c 危険 ・ロボットコントローラおよびロボットは、一般産業機器用に製造されております。以下の用途では使用できません。 ・人命に関わる医療機器などの装置 ・人の移動や搬送を目的とする装置 ・社会的、公共的に重大な影響を及ぼす装置 ・車載、船舶など振動が加わる環境でのご使用 ・ロボットコントローラを非常停止状態にする非常停止入力端子が用意されています。この端子を使用し、ロボットコントローラを含めた システムが安全側に働くように、安全回路を構築してください。 警告 ・ロボットコントローラの状態については、本書および関連する取扱説明書を参照し、確認してください。また、ロボットコントローラを 含めたシステムが安全側に働くようにシステムを構築してください。 ・ロボットの停止状態(一時停止、非常停止、異状により停止、など)が作業者に分かるように、見やすい位置に非常灯を設置してください。 注意 ・制御線や通信ケーブルは、主電源回路や動力線などと束線したり、近接したりしないでください。100mm 以上を目安として離してください。 束線したり、近接したりすると、ノイズによる誤動作の原因となります。 2.2 w 2 設計上の注意事項 設置上の注意事項 警告 ・電源端子台のアース端子を必ず接地してください。接地しないと、感電の恐れがあります。 ・コネクタの配線接続はメーカ指定の工具で正しく圧着、圧接またはハンダ付けし、コネクタは確実に取り付けてください。 ・取り付けや配線作業などは、必ず電源を外部にて全相遮断してから行ってください。全相遮断しないと、感電・製品損傷の恐れがあります。 ・ロボットおよびロボットコントローラは防爆仕様ではありません。爆発や引火の恐れのある可燃性ガスやガソリンおよび溶剤などにさら される場所では、ロボットおよびロボットコントローラを使用しないでください。これを守らないと、けがや死亡も含む重大な事故、ま たは火災の恐れがあります。 ・ロボットコントローラは、取扱説明書記載の環境仕様で使用してください。環境仕様の範囲外で使用すると、感電・火災・誤動作・製品 損傷あるいは劣化の原因になります。 ・ロボットコントローラおよびプログラミングボックスの設置場所は、ロボットの動作範囲の外でかつロボットの動作が見渡せて操作しや すい場所に設置してください。 ・作業(ティーチング、点検など)を安全に行えるスペースがある場所に設置してください。スペースがない場合、作業がしにくいだけで なく、けがなどの原因になります。 ・ロボットコントローラは、安定した水平な場所に設置し、確実に固定してください。ロボットコントローラを上下逆に取り付けたり、斜 めに取り付けることは避けてください。 ・周囲に十分空間を取り、通風の良い場所に設置してください。通風が悪いと、誤動作、故障、火災の原因になります。 ・ロボットコントローラの外部に露出したコネクタやロータリスイッチ、ディップスイッチ以外の導電部分や電子部品には、直接触らない でください。感電または故障の原因になります。 ・ロボットコントローラの取り付け用 L 型金具のネジは、確実に固定してください。確実に固定しないと、コントローラの落下の原因にな ります。 ・各接続ケーブルのコネクタは装着部に確実に装着してください。確実に装着しないと、接続不良による誤動作の原因になります。 w c 警告 ・取り付けや配線作業などは、必ず電源を外部にて全相遮断してから行ってください。全相遮断しないと、感電・製品損傷の恐れがあります。 注意 ・ロボットコントローラ内に、切り粉や配線屑などの異物が入らないように注意してください。異物が入ると、誤動作、故障、火災などの 原因になります。 ・ロボットコントローラに接続するケーブルは、必ずダクトに収めるか、またはクランプによる固定処理を行ってください。ダクトに収め なかったり、クランプによる固定処理をしていなかったりすると、ケーブルのぶらつきや移動、不注意の引っ張りなどによりコネクタやケー ブルの破損、ケーブルの接触不良による誤動作の原因となります。 ・ケーブルを加工したり、重いものを載せたり、ケーブルが傷つくような扱いはしないでください。ケーブルが傷つくと、誤動作や感電の 原因になります。 ・ロボットコントローラに接続するケーブルが、損傷を受ける恐れがある場合は、覆い等の保護処置を行ってください。 ・ケーブル接続の際にコネクタに衝撃や負荷を与えないでください。コネクタピンが変形したり、内部の基板が損傷したりする場合があり ます。 ・ロボットコントローラに接続されたケーブルを取り外すときは、ケーブル部分を手に持って引っ張らないでください。固定されているコ ネクタは、固定している部分を緩めてから取り外してください。固定されたままでケーブルを引っ張ると、コネクタやケーブルの破損、ケー ブルの接触不良による誤動作の原因になります。 2.4 w w 配線上の注意事項 立ち上げ・保守上の注意事項 危険 ・ロボットの運転中および主電源が入っているときには、ロボットの動作範囲内に絶対に入らないでください。けがや死亡を含む重大な事 故につながる恐れがあります。ロボット動作範囲に容易に近づけないよう安全防護柵やエリアセンサによるゲートインターロック等の措 置を講じてください。 ・ティーチングや保守点検等のため、やむを得ずロボットの動作範囲内で運転を伴う作業を行う場合は、異常時にただちにロボットの運転 を停止することができるようにプログラミングボックスを携帯させてください。また、ロボットの動作速度は 3% 以下にしてください。 けがや死亡を含む重大な事故につながる恐れがあります。 ・ロボットを運転させるときは、以下のことを確認してください。 ・ロボットの動作範囲内に人がいないこと ・プログラミングボックスが所定の位置にあること ・ロボットおよび関連機器が異常状態でないこと 警告 ・ロボットの操作は、安全や操作に関する講習を受けた者が行ってください。講習を受けていない者が操作することは非常に危険です。 ・ロボットおよびロボットコントローラは防爆仕様ではありません。爆発や引火の恐れのある可燃性ガスやガソリンおよび溶剤などにさら される場所では、ロボットおよびロボットコントローラを使用しないでください。これを守らないと、けがや死亡も含む重大な事故、ま たは火災の恐れがあります。 ・端子に触れないでください。感電・製品の損傷・誤動作の原因になります。 ・ロボットとロボットコントローラは必ず正しい組み合わせで接続してください。不適切な組み合わせで使用すると、火災や故障の原因と なります。 ・清掃や端子ネジの増し締めは、必ず電源を外部にて全相遮断してから行ってください。全相遮断しないと、感電・製品の損傷・誤動作の 原因になります。 ・運転中のロボットコントローラやロボットに触れないでください。運転中のロボットコントローラやロボット本体は高温になっている場 合があり、触れるとやけどをする恐れがあります。 ・濡れた手でロボットコントローラやプログラミングボックスに触れたり、操作したりしないでください。濡れた手で触れたり操作したり すると、感電または故障の原因になります。 ・使用中に異常な臭いや音がしたり、煙が出たりした場合は、直ぐに電源を切ってください。 感電や火災、または故障の恐れがあります。使用を中止して、弊社までご連絡ください。 ・ロボットコントローラやプログラミングボックスの分解や改造は絶対にしないでください。また、内部を開けたりしないでください。感電・ 故障・誤動作・けが・火災の原因になります。 ・やむを得ず、ロボットやコントローラの部品を交換したり修理したりする場合は、弊社からの指示に従って作業を行ってください。適切 な知識や指導を受けていない者がコントローラやロボットを点検・保守することは非常に危険です。 ・弊社からの指示のもとロボットコントローラへの保守作業や点検を行う場合は、電源を遮断後、RCX シリーズは 30 分以上、SR1 シリー ズは 5 分以上放置してから作業を行ってください。ロボットコントローラに高温状態の箇所や高い電圧が残っている箇所が存在し、やけ どや感電の恐れがあります。 ・立ち上げ・保守作業中は、作業者以外の者が起動スイッチや切替スイッチを不用意に操作することを防止するため、プログラミングボッ クスや操作盤などに、作業中である旨がわかる表示をするか、操作盤のカバーに施錠をするなどの措置を講じてください。 ・立ち上げ・保守作業などのために、ロボットの動作範囲内で作業を行う場合は「作業規定」を定め、作業者に徹底を図ってください。 3 安全の手引き 2.3 安全の手引き c 注意 ・ノイズ対策用フェライトコアを使用する場合、必ずノイズ対策用フェライトコアをケーブルのなるべくコントローラに近い場所もしくは ロボットに近い場所に装着してください。ノイズによる誤動作の原因になります。 ・ロボットコントローラ内部のデータは、外部記憶装置に保存してください。ロボットコントローラ内部のデータ(プログラム、ポイントデー タなど)は予期せぬ理由により消失することもあり得ます。必ずバックアップを取るようにしてください。 ・プログラミングボックスの表面の汚れを拭く場合、シンナーやベンジン、アルコールなどを使用しないでください。表面のシートや印刷 が剥げたり、故障の原因になります。お手入れは、柔らかい布で乾拭きしてください。 ・固い物や先の尖った物でプログラミングボックスのキー操作をしないでください。キーが傷つくと誤動作や故障の原因となります。キー 操作は指先で行うようにしてください。 ・SD メモリカードの挿入口には指定の SD メモリカード以外の物を入れないでください。指定の SD メモリカード以外の物を入れると、誤 動作や故障の原因となります。 ・SD メモリカードはプログラミングボックスに装着したままにしないでください。装着したままにすると、誤動作や故障の原因となります。 データをバックアップまたは読み込むときだけ装着するようにしてください。 2.5 w w 危険 ・ロボットの運転中および主電源が入っているときには、ロボットの動作範囲内に絶対に入らないでください。けがや死亡を含む重大な事 故につながる恐れがあります。ロボット動作範囲に容易に近づけないよう安全防護柵やエリアセンサによるゲートインターロック等の措 置を講じてください。 ・ティーチングや保守点検等のため、やむを得ずロボットの動作範囲内で運転を伴う作業を行う場合は、異常時にただちにロボットの運転 を停止することができるようにプログラミングボックスを携帯させてください。また、ロボットの動作速度は 3% 以下にしてください。 けがや死亡を含む重大な事故につながる恐れがあります。 4 警告 ・ロボットの操作は、安全や操作に関する講習を受けた者が行ってください。講習を受けていない者が操作することは非常に危険です。 2.6 c ロボット動作時の注意事項 廃棄時の注意事項 注意 ・製品を廃棄するときは、産業廃棄物として扱ってください。法令で定められた方法、または専門の廃棄物処理会社に委託して廃棄してく ださい。 3. ロボットに対する安全対策 3.1 安全の手引き スカラ型ロボットに対する安全対策 111 運搬時の安全対策 安全保護のためにロボットに付属しているアイボルトを利用してください。 詳細については、必ずロボット取扱説明書を参照してください。 222 感電保護対策 安全保護のために必ず保護アース端子を利用してください。 詳細については、必ずロボット取扱説明書を参照してください。 3.2 単軸、直交型、ピック&プレイス型ロボットに対する安全対策 111 感電保護対策 安全保護のために必ず保護アース端子を利用してください。 詳細については、必ずロボット取扱説明書を参照してください。 4. モータの過負荷対策 モータの過負荷(オーバーロード)等の異常検出はソフトウェアで行っていますので、コントローラのパラメー タは接続されているモータの機種に正しく設定されている必要があります。 出荷時には、ロボットに合わせたパラメータがコントローラに設定されています。ロボット機種をご確認の上、 ご使用ください。 5. 警告表示 5.1 警告ラベル 作業者に注意を促すために、下記のようなラベルがコントローラに貼られています。ヤマハロボットを安全に 正しくご使用いただくために、ラベルの指示や注意には必ず従ってください。 111 取扱説明書参照ラベル 取扱説明書参照 READ INSTRUCTION MANUAL 91001-X1-00 知っておかなければならない内容が取扱説明書に記述されていることを示します。 コントローラを使用する前に、必ず取扱説明書を熟読してください。 特に、外部安全回路の構築や電源の接続は取扱説明書を熟読し、確認の上、作業を行ってください。 また、コネクタの接続には方向があります。接続方向には注意してください。 5 安全の手引き 5.2 警告マーク 作業者に注意を促すために下記のようなマークがコントローラにあります。ヤマハロボットを安全に正しくご 使用いただくために、マークの指示や注意には、必ず従ってください。 111 感電注意マーク 91002-X1-00 高い電圧を取り扱っていることを示します。 端子台、コネクタ接続部に触れると、感電の恐れがあります。 222 注意マーク ! 91003-X1-00 知っておかなければならない内容が取扱説明書に記載されていることを示します。 コントローラを使用する前に、必ず取扱説明書を熟読してください。 特に、外部安全回路の構築や電源の接続は取扱説明書を熟読し、確認の上、作業を行ってください。 また、コネクタの接続には方向があります。接続方向には注意してください。 333 高温注意マーク 91004-X1-00 高温になる可能性があることを示します。 ヒートシンク、回生ユニットは高温になります。触れないでください。火傷の恐れがあります。 6. 産業用ロボットの特別教育 ロボットのティーチング、プログラミング、動作の確認、点検、調整、修理などを行う作業者は適切な訓練を 受けていること、およびその仕事を安全に行う能力を持っている必要があります。必ず取扱説明書を読み、理 解したうえで作業を行ってください。 また、産業用ロボットの関係業務(ティーチング、プログラミング、動作の確認、点検、調整、修理など)は 各国の法規・法令・規格に定められた有資格者が実施してください。 日本において、ヤマハロボットは、労働安全衛生規則の定める産業用ロボットに該当します。ロボットを使用 する事業者は、労働安全衛生法第 59 条および関係省令などの定めるところにより、産業用ロボットの関係業務 に従事する作業者に産業用ロボットの特別教育を実施してください。 7. 日常点検・定期点検の実施 日常点検および定期的な点検は必ず実施し、作業の前にロボットおよび関連機器に異常が無いことを確認して ください。異常を認めた場合は、ただちに補修その他必要な措置を講じてください。 6 8. ロボットの設置 ・ 使用に関する主な法令 ・ 規格 以下に載せた法令や規格は日本国内での使用を対象とした代表的なものです。設計 ・ 製造するシステムや用途 に応じて適用すべき他の法令や規格があればそれらも守ってください。 通商産業省関連の法令類 電気事業法(昭和 39 年法律第 170 号改正 : 昭和 59 年法律第 23 号) 電気用品取締法(昭和 36 年法律第 234 号改正 : 昭和 59 年法律第 23 号) 電気用品取締法施行令(昭和 37 年政令第 324 号改正 : 昭和 62 年政令第 407 号) 厚生労働省関連の法令類 労働安全衛生法(昭和 47 年法律第 57 号改正 : 昭和 55 年法律第 78 号) 労働安全衛生法施行令(昭和 47 年政令第 318 号改正 : 昭和 55 年政令第 297 号) 労働安全衛生規則(昭和 47 年厚生労働省令第 32 号改正 : 昭和 58 年厚生労働省令第 18 号) 第 36 条の 31 号 産業用ロボットの教示業務 第 36 条の 32 号 産業用ロボットの検査 ・ 調整 ・ 確認業務 第 150 条の 3 1. 作業規定作成 2. 直ちに停止できるための措置 3. 操作盤上のスイッチに対する誤操作防止対策 第 150 条の 4 運転中の危険防止(柵 ・ 囲いの設置など) 第 150 条の 5 教示 ・ 検査時における操作盤上のスイッチの管理、直ちに停止できる対策 第 151 条 教示 ・ 検査など作業前の点検と補修 産業用ロボットの使用等の安全基準に関する技術上の指針(昭和 58 年技術上の指針公示第 13 号) 安全衛生特別教育規定(昭和 58 年厚生労働省告示第 49 号) 教示 ・ 検査などの特別教育の内容 小型ロボットの適用除外規定(昭和 58 年厚生労働省告示第 51 号) ・全ての原動機出力が 80W 以下のもの ・固定シーケンス制御で単純な動きの繰り返しのもの 通達(基発第 340 号) 可動部の長さ ・ ストロ−クがすべて 300mm 以下であるもの ※上記の法令、規格の例は内容を要約して記載しています。詳しくは、各々の原文を参照してください。 日本工業規格 (JIS) JIS B8433-1 (ISO 10218-1) 「 産業用ロボット-安全要求事項-第 1 部:ロボット 」 本書によって、工業所有権その他の権利の実施に対する保証、または実施権を許諾するものではあり ません。また、本書の掲載内容の使用により起因する工業所有権上の諸問題については、当方は一切 その責任を負うことは出来ません。 2011 YAMAHA MOTOR CO., LTD. 7 安全の手引き 第 1 章 CEマーキングについて 目次 1. CE マーキング対応 1-1 2. 安全規格 1-2 2.1 EC 指令の適合に対する注意事項 1-2 2.2 CE マークについて 1-2 2.3 適用した指令とその関連規格 1-3 2.4 CE マーキング対象ロボット 1-3 2.5 EU 加盟国公用語対応に関する注意 1-3 3. 使用条件 1-4 1. CE マーキング対応 ここでは、RCX シリーズ /SR1 シリーズの CE マーキング対応について、その基本的な事項を説明します。CE マー キング対応コントローラと標準コントローラの基本仕様の違いは以下のとおりです。 CE 対応コントローラ サービスモード プログラミングボックス 有り CEマーキングについて ■ ■ 主な基本仕様の違い(RCX シリーズコントローラ) 標準コントローラ 無し RPB-E (イネーブルスイッチ対応仕様) RPB (標準仕様) ■ ■ 主な基本仕様の違い(SR1 シリーズコントローラ) CE 対応コントローラ サービスモード プログラミングボックス 有り HPB-D (イネーブルスイッチ対応仕様) 1 標準コントローラ 無し HPB (標準仕様) 1-1 1 2. 安全規格 2.1 EC 指令の適合に対する注意事項 CEマーキングについて ヤマハロボット(ロボットとコントローラ)はロボットシステムではありません。ヤマハのロボットシリーズ はお客様の装置に組み込んで使用する部品(組込み用装置)であり、弊社では、この範囲で EC 指令に対する組 み込み宣言をしています。ヤマハロボットシリーズ単体の使用は EC 指令に対する適合を保証するものではあり ません。お客様がヤマハロボットを組み込んだ装置を完成させ最終製品として欧州域内へ出荷または欧州域内 で使用する場合、必ずお客様自身で EC 指令の適合を確認してください。 ●ヤマハロボット(ロボットとコントローラ)とロボットシステムの違いに関して ヤマハロボット(ロボットおよびコントローラ)はロボットシステムの一部を構成するものであり、ロボッ トシステムではありません。 なぜならば、ヤマハロボットは ISO10218-1:2006 規格 -3.20 項の“ロボットシステム”の定義の中に ある“エンドエフェクタ(end effector(s))”と“ロボットがタスクを行うために必要なあらゆる設備、 装置またはセンサ(any equipment, devices, or sensors required for the robot to perform its tasks)” を含んでいないからです。 2.2 CE マークについて ヤマハロボットは、お客様の装置に組み込んで使用する部品(組込み用装置)であり、EC 指令に関して「半完 成品」として適合を宣言しているため、CE マークを添付しておりません。 1-2 2.3 適用した指令とその関連規格 ヤマハロボットに適用した指令とその関連規格を示します。 1 ■ ■ RCX240 EC 指令 関連規格 EN ISO12100-1 EN ISO12100-2 EN ISO10218-1 EN ISO14121-1 EN60204-1 : Safety : Safety : Safety : Safety : Safety EMC 指令 2004/108/EC EN 55011 EN 61000-6-2 : EMC Emission of ISM Equipment : EMC Immunity for Industrial Environments CEマーキングについて 機械指令 2006/42/EC of machinery - Basic concepts Part1 of machinery - Basic concepts Part2 requirements - Part1:Robot of machinery - Risk assessment of machinery - Electrical equipment of machines ■ ■ RCX221/RCX222 EC 指令 関連規格 機械指令 2006/42/EC EN ISO12100-1 EN ISO12100-2 EN ISO14121-1 EN60204-1 : Safety : Safety : Safety : Safety of of of of machinery - Basic concepts Part1 machinery - Basic concepts Part2 machinery - Risk assessment machinery - Electrical equipment of machines EMC 指令 2004/108/EC EN 55011 EN 61000-6-2 : EMC Emission of ISM Equipment : EMC Immunity for Industrial Environments 参照規格:EN ISO10218-1: Safety requirements - Part1:Robot ■ ■ SR1 EC 指令 関連規格 機械指令 2006/42/EC EN ISO12100-1 EN ISO12100-2 EN ISO14121-1 EN60204-1 : Safety : Safety : Safety : Safety of of of of machinery - Basic concepts Part1 machinery - Basic concepts Part2 machinery - Risk assessment machinery - Electrical equipment of machines EMC 指令 2004/108/EC EN 55011 EN 61000-6-2 : EMC Emission of ISM Equipment : EMC Immunity for Industrial Environments 参照規格:EN ISO10218-1: Safety requirements - Part1:Robot 2.4 CE マーキング対象ロボット 対象となるロボットシリーズは以下のとおりです。 コントローラ ロボット名称 RCX240 単軸ロボット :FLIP-X シリーズ、PHASER シリーズ 直交型ロボット :XY-X シリーズ ピック&プレイス型ロボット:YP-X シリーズ スカラ型ロボット :YK-X シリーズ、YK-XG シリーズ RCX221 RCX222 単軸ロボット :FLIP-X シリーズ、PHASER シリーズ 直交型ロボット :XY-X シリーズ ピック&プレイス型ロボット:YP-X シリーズ SR1 単軸ロボット :FLIP-X シリーズ、PHASER シリーズ 2.5 EU 加盟国公用語対応に関する注意 ヤマハロボットを EU 加盟国に設置する場合は、警告ラベルを除き、取扱説明書群・CE 宣言書・操作画面文字 で使用される言語は英語のみを使用します。 警告ラベルは、ピクトグラムのみ、または警告文が入る場合、英語のほかに、日本語が追加される場合があり ます。 1-3 1 3. 使用条件 ヤマハのロボットシリーズに対するいくつかの使用条件を明確にします。 ● EMC(Electromagnetic compatibility) CEマーキングについて ヤマハロボットシリーズは工業環境製品です。 (EMC 指令に関して適用される定義:EN61000-6-2 規格の第一項の Scope を参照してください。) EMC 指令に適合させるためには、お客様の最終製品(装置全体)で評価、対策をしてください。ヤマハロボット単体にお ける EMC 対策は以降の章の「EMC 対策例」を参考としてください。 ● 設置条件 ・保護構造 ヤマハロボットは機器組み込み型(built-in equipment)であり、感電に対する保護構造は Class Ⅰです。 感電保護のために必ずロボットおよびロボットコントローラを接地してください。詳細については、コントローラ取扱 説明書およびロボット取扱説明書を参照してください。 ・エンクロージャー(Enclosure) ロボットコントローラのケースは、EN60204-1 規格に従ったエンクロージャー(enclosure)として設計されていません。 接触による感電の危険および外部環境(塵、水など)に対して適切な保護をしてください。 ・絶縁協調(Insulation co-ordination) 絶縁協調に関しては、次の条件で設計しています。 過電圧カテゴリー(Overvoltage category)Ⅱ 汚損度(Pollution degree)2 これ以上の厳しい環境で使用する場合は、適切な対策をしてください。 ● 防爆 ・ロボットおよびロボットコントローラは防爆仕様ではありません。 爆発や引火の恐れがある可燃性ガス、爆発の恐れがあるガソリンおよび溶剤などにさらされる場所ではロボットを使用 しないでください。 1-4 第 2 章 RCXシリーズ 目次 1. システムの概要 1.1 システム概要 2-1 2-1 1.1.1 主なシステム構成 2-1 1.2 2-3 コントロールシステム構成 1.2.1 基本構成 1.2.2 電源および非常停止系回路構成 2-3 2-6 1.3 2-7 プログラミングボックス(RPB-E) 1.3.1 各部の名称と機能 1.3.2 RPB コネクタ 1.4 サービスモード 1.4.1 サービスモードとは 1.4.2 サービスモードの機能を有効にするための流れ 1.4.3 サービスモードのパラメータ設定 2. EMC 対策例 2.1 RCX240 2-7 2-8 2-10 2-10 2-11 2-11 2-13 2-13 2.1.1 構成 2.1.2 対策部品 2-13 2-14 2.2 2-18 RCX221/RCX222 2.2.1 構成 2.2.2 対策部品 3. 外部安全回路例 2-18 2-19 2-22 3.1 パフォーマンスレベル 2-22 3.2 RCX240 回路例 2-23 3.2.1 3.2.2 3.2.3 3.2.4 カテゴリ 4 カテゴリ 3 カテゴリ 2 回路動作概略 2-25 2-26 2-27 2-28 3.3 RCX221/RCX222 回路例 2-29 3.3.1 3.3.2 3.3.3 3.3.4 カテゴリ 4 カテゴリ 3 カテゴリ 2 回路動作概略 2-31 2-32 2-33 2-34 1. システムの概要 1.1 システム概要 RCX シリーズは、スカラ型ロボット、直交型ロボット等と組み合わせることにより、主として組立やピックア ンドプレイスの用途にお使い頂けます。また、種々の検査機への応用、直線・円弧補間機能を利用したシーリ ングやスプレイ塗布装置への応用が可能です。 1.1.1 主なシステム構成 RCXシリーズ ■ ■ RCX240 例:YK500XG のみ ロボットコントローラの軸すべてをメインロボット軸とします。 システムの概要 3 1 OP. OP. MO TOR 40 RCX2 RPB-E RPB R PW SRV ERR B XM RO I/O YM BATT XY XY SEL M CO B RO I/O 2 OP. 4 OP. P N ZR ACIN O DI STD. ZM BATT ZR L N TY SAFE L1 N1 RM -STOP 14 EXT.E N13− PI ヤマハロボット 外部制御 (シーケンサなど) パーソナル コンピュータ 2 外部非常停止回路 非常停止ボタン 安全リレー 安全ドアスイッチ など ( 91201-R6-00 2-1 ■ ■ RCX221/RCX222 例:XY-X シリーズ システムの概要 2 OP.1 RPB-E SRV RCXシリーズ 22 RCX2 OR MOT ERR RDY OP E-ST RGEN BAT B/A P TEM ROB I/O XM ACIN L N B RP L1 OP.2 N1 ! TY SAFE P -STO EXT.E-12 PIN11 YM OM SD/C パーソナル コンピュータ 外部非常停止回路 非常停止ボタン 安全リレー 安全ドアスイッチ など ( ヤマハロボット 外部制御 (シーケンサなど) 91201-R2-00 2-2 1.2 コントロールシステム構成 1.2.1 基本構成 コントロールシステムの基本ブロック図を示します。 ■ ■ RCX240 基本ブロック図 2 基本ブロック図 CN5 CN1 CN4 CN2 TH1 (FG) CN3 CN4 CN6 RM CN7 CN12 CN14 CN2 DRIVER 1 CN2 CN4 CN5 CN10 CN7 CN13 CN10 CN13 CN7 CN26 STD.DIO CN5 CN16 CPU BOARD CN8 CN1 COM CN2 CN16 RPB SEL DRIVER 2 CN3 RPB CN1 CN1 CN3 CN11 SAFETY CN2 CN1 CN15 BATT ZR CN8 ROB I/O ZR CN7 AC/DC 5V, ±12V YM ZM BATT XY CN10 HEATSINK XM ROB I/O XY CN3 AC/DC 24V CN1 CN6 CN8 CN9 CN11 DRIVER POWER MOTOR RCXシリーズ TB1 RGEN ACIN L N L1 N1 TB2 CN4 CN5 OP.1 OP.2 OP.3 OP.4 91202-R6-00 2-3 ■ ■ RCX221 基本ブロック図 基本ブロック図 CN6 CN4 ACIN D.POWER BOARD ASSY ASSY L N L1 N1 MOTHER BOARD TEMP CN3 CN2 CN5 CN3 RCXシリーズ RGEN CN2 CN4 ASSY CN1 CN3 DRIVER2 BOARD CN1 YM 2 CN2 CN1 ASSY CN1 CN3 DRIVER2 BOARD CN1 MOTOR XM CN2 TB1 ROB I/O XY CN4 RPB CN8 SAFETY COM SD MEMORY CN5 CPU BOARD ASSY CN5 CN12 CN1 CN2 OP.BOARD CN1 CN3 OP.BOARD CN1 91201-R1-00 2-4 ■ ■ RCX222 基本ブロック図 基本ブロック図 ACIN D.POWER BOARD ASSY ASSY L N L1 N1 RCXシリーズ CN6 CN4 2 MOTHER BOARD TEMP CN3 CN2 CN5 CN3 RGEN CN2 CN4 ASSY CN1 CN3 DRIVER2 BOARD CN1 YM CN2 CN1 ASSY CN1 CN3 DRIVER2 BOARD CN1 MOTOR XM CN2 TB1 BATT A CN14 BATT B CN16 ROB I/O XY CN4 RPB CN8 SAFETY COM SD MEMORY CN5 CPU BOARD ASSY CN5 CN12 CN1 CN2 CN1 OP.BOARD CN3 OP.BOARD CN1 91202-R2-00 2-5 1.2.2 電源および非常停止系回路構成 コントロールシステムの電源系および非常停止系回路ブロック図を示します。 電源系・非常停止系回路ブロック図 Emergency stop button ※4 ABS BATTERY 2 Selector switch RCXシリーズ +3.6V ※2 RPB-E RPB CONTROL CIRCU IT BLOCK Enable switch POSITION BACKUP CIRCUIT ROBOT I/O CPU Position Data SAFETY ※3 MOTOR MOTOR RELAY1 MOTOR DRIVE CIRCUIT +24V External emergency stop circuit DC5V,12V,15V (User equipment) DC280V REALY2 AC200∼230V IN MAIN MOTOR POWER CIRCUIT L N FUSE L1 CONTROL N1 GND FUSE CONTROL POWER CIRCUIT DC5V ※1 DC12V DC24V POWER CIRCUIT BLOCK ※2 RCX240/RCX221/RCX222 ※1)絶縁トランスにより入力電源と各制御電源は 絶縁されている。 ※2)DC3.6V、DC5V、DC12V、DC24Vの0Vライ ンは保護アースに接続されていない。 ※3)RPB-Eからの配線図は、RPB-Eのコネクタ 入出力信号表を参照してください。 ※4)RCX221を除く。 91201-R0-00 2-6 1.3 プログラミングボックス(RPB-E) プログラミングボックス(RPB-E)は、コントローラと接続して各種操作を行う専用装置です。ロボットの手動 操作、プログラミングの入力や編集、ティーチング、パラメータ設定など、すべての操作をこの装置で行います。 1.3.1 各部の名称と機能 RPB-E 上には非常停止ボタンとイネーブルスイッチが装着されています。これらの接点出力は、コントローラ の SAFETY コネクタにより設備全体の非常停止回路に接続できるようになっています。また、RPB-E にはセレ クタスイッチが装着されています。このスイッチは、お客様の仕様・用途に応じて使用することができます。 1. ディスプレイ(画面) 4. セレクタスイッチ RCXシリーズ RPB-E (背面) 3. 非常停止ボタン 2. シートキー 5. イネーブルスイッチ 6. RPBコネクタ 91202-R0-00 ●主な機能 No. 名称 機能 1 ディスプレイ (画面) 2 シートキー ロボットを動作させたり、プログラムの入力などを行うためのキースイッチです。 ファンクションキー、コントロールキー、データキーの 3 ブロックに大別されます。 3 非常停止ボタン ロボットの動作中にこのボタンを押すと、ロボットは非常停止します。B 接点(NC 接点)タイプの スイッチです。 IDEC ㈱製 XA1E-BV302R 使用 セレクタスイッチ お客様側で、RCX240 は RPB SEL コネクタ、RCX221/RCX222 は SAFETY コネクタへ配線するこ とにより使える任意スイッチです。 スイッチを ON にすると接点はオープンし、OFF にすると接点はクローズします。配線未接続状態 では、ON/OFF による機能は持っていません。 5 イネーブルスイッチ 3 ポジションスイッチです。 安全性を考慮したスイッチで、中間押し状態でのみロボット操作が可能です。 SAFETY コネクタの LOCKIN1 ~ 4 が配線未接続状態では、本スイッチの機能は使用できません。 スイッチの状態とロボットの動作状態が以下のようになるよう外部で安全回路を構築してください。 スイッチ解放状態 :非常停止状態 スイッチ中間押状態 :動作可能状態 スイッチ押込状態 :非常停止状態 IDEC ㈱製 HE2B-M200PB 使用 6 RPB コネクタ コントローラと接続するためのコネクタです。 4 2 40 桁 ×15 行の液晶(LCD)ディスプレイで、各種情報を表示します。輝度の調整が可能です。 2-7 1.3.2 RPB コネクタ RPB-E 上には非常停止ボタンとイネーブルスイッチが装着されています。これらの接点出力は、コントローラ の SAFETY コネクタにより設備全体の非常停止回路に接続できるようになっています。 ここでは、信号の接続について説明します。 c 2 注意 ・ケーブルおよびコネクタの変更・改造は行わないでください。RPB コネクタにはプログラミングボックス制御用入出力信号のほかに、外 部安全回路構築のための信号が含まれており、ケーブルおよびコネクタの変更・改造を行うと大変危険です。 ・必ず SAFETY コネクタを用いて外部安全回路を構築してください。プログラミングボックスには、非常停止ボタンとイネーブルスイッチ が装着されておりますが、コントローラ外部にて安全回路構築していただくことを前提に設計しているため、単体では機能しません。 RCXシリーズ ■ ■ RCX240 RPB-E の RPB コネクタの各ピンは、SAFETY コネクタおよび RPB SEL コネクタの各ピンと接続されています。 各ピンの対応は以下のとおりです。 RPB コネクタ ピン番号 RPB-E 非常停止接点 系統 1 非常停止接点 系統 2 イネーブル接点 系統 1 イネーブル接点 系統 2 コネクタ ピン番号 名称 13 3 E-STOPIN1 14 4 E-STOPIN2 15 5 E-STOPIN3 16 6 E-STOPIN4 7 LCKIN1 8 LCKIN2 17 SAFETY コネクタと接続 18 19 9 LCKIN3 20 10 LCKIN4 − KEY1 − KEY2 21 セレクタスイッチ 接続先コネクタ 22 RPB SEL コネクタと接続 回路図 RPB-E RCX240 非常停止 SAFETY 3 4 5 6 7 8 9 10 RPB SEL イネーブル セレクタ RPB 1∼12 13 14 15 16 17 18 19 20 21 22 91203-R6-00 2-8 ■ ■ RCX221/RCX222 RPB-E の RPB コネクタの各ピンは、SAFETY コネクタの各ピンと接続されています。 各ピンの対応は以下のとおりです。 RPB コネクタ ピン番号 RPB-E 非常停止接点 系統 1 非常停止接点 系統 2 イネーブル接点 系統 1 セレクタスイッチ 名称 13 13 E-STOPIN1 14 14 E-STOPIN2 15 15 E-STOPIN3 16 16 E-STOPIN4 17 17 LCKIN1 18 SAFETY コネクタと接続 18 LCKIN2 19 19 LCKIN3 20 20 LCKIN4 21 8 KEY1 22 9 KEY2 回路図 RPB-E RCX221/RCX222 非常停止 イネーブル セレクタ RPB SAFETY 13 14 15 16 17 18 19 20 8 9 1∼12 13 14 15 16 17 18 19 20 21 22 91202-R1-00 2-9 2 RCXシリーズ イネーブル接点 系統 2 コネクタ ピン番号 接続先コネクタ 1.4 サービスモード ここでは、サービスモードについて説明します。 1.4.1 サービスモードとは 2 サービスモードとは、ロボットシステムの安全保護柵内で、RPB-E による作業を安全に行うときに使用するこ とができるモードです。 このモードは、セーフモード設定の場合のみ有効となります。セーフモードは、出荷時に設定がされており、 CE マーキング対応コントローラはセーフモードに設定されています。 RCXシリーズ c 注意 CE マーキング対応コントローラは、必ずセーフモード設定となります。 基本操作モード 基本操作モード サービスモード 自動モード 手動モード プログラム モード システム モード DI/DO モニタモード ユーティリティ モード 91203-R0-00 サービスモードは、基本モードの自動モードと手動モードを包括するような形となっており、DI02(サービスモー ド入力)の接点が開く(OFF)ことで選択されます。DI02 の接点が閉じている(ON)と、通常モードです。 シリアル I/O がオプションボード設定されている場合は、SI02 と DI02 のいずれか一方でも接点が開いている (OFF)とサービスモードとなります。(SI02 と DI02 の両方の接点が閉じている(ON)のときのみ通常モード となります。) DI02 の接点を開いている(OFF)と、サービスモードのパラメータ設定に従った操作レベルおよび動作速度制限、 操作デバイスの排他的制御のサービスモードとなり、下記のような機能を選択することができます。 1.RPB-E のみの操作が有効になる。 2.自動モードでの操作を禁止する。 3.ロボット移動時の最高スピードを 3% 以下にする。 4.ロボット動作に関係する操作は、Hold to Run とする。 (Hold to Run とは、RPB-E からの操作でキーを押し続けている間のみロボット動作(プログラム実行を含む)が実行さ れる機能です。) これにより、自動モードと手動モードは、セーフモード設定の場合、サービスモードのパラメータ設定により、 その操作内容が通常のモードの時と変化します。 n 2-10 要点 ・サービスモード入力が変化した場合、プログラム動作中またはジョグ移動中では、一時停止します。 ・DI02 の NPN/PNP 仕様は、以下のように決定します。 RCX240 STD.DIO の設定により決定 RCX221/RCX222 DI.COM や DO.COM の入力により決定 ・DI02 の入力電流は、7mA 以上の容量が必要です。 ・RCX240 で、セーフモード設定がされているコントローラの場合、STD.DIO に外部 24V 電源が供給されていない状態では、必ずサービ スモード状態になります。これをソフト的に解除するには、“STD. DIO DC24V デンゲンカンシ”パラメータを無効に設定します。 1.4.2 サービスモードの機能を有効にするための流れ ・セーフモード設定である ・サービスモードのパラメータが設定されている ↓ ・DI02 の接点を開く(OFF にする) (シリアル I/O がオプションボード設定されている場合は、SI02 と DI02 のいずれか一方でも接点 を開く(OFF にする)とサービスモードとなる ↓ サービスモードのパラメータの設定内容は、次項を参照してください。 1.4.3 サービスモードのパラメータ設定 サービスモードには次の 3 つのパラメータがあります。 1.サービスモードレベル 2.サービスモード時の動作速度制限 3.サービスモード時の操作デバイス制御 これらの設定によってサービスモード時の操作レベルおよび動作速度制限、操作デバイスの排他的制御の内容 が決まります。 サービスモードのパラメータを編集し、その設定結果の保存作業を行わない場合、設定内容はコントローラの 電源遮断時まで有効となります。 サービスモードのパラメータの設定方法は、各コントローラの取扱説明書を参照してください。 w 警告 サービスモードの各パラメータの初期値からの設定変更は、ロボット動作に関わる操作を行う作業者に対する危険要因が増すことが予想さ れます。お客様の責任で設定変更することは可能ですが、安全に対する十分な配慮のもと行ってください。 2-11 RCXシリーズ ・サービスモードのパラメータ設定に従った操作レベルおよび動作速度制限、操作デバイスの排他的 制御のサービスモードとなる 2 111 サービスモードレベル モードレベルを選択します。レベルによって、Hold to Run 機能の有効/無効、自動モードでの操作の可能/禁止が決定さ れます。 Hold to Run 機能とは、RPB-E からの操作でキーを押し続けている間のみロボット動作(プログラム実行を含む)が実行さ れる機能です。 内容 設定値 2 Hold to Run 機能 自動モード操作 無効 可能 レベル 0 RCXシリーズ ※ レベル 1 有効 可能 レベル 2 無効 禁止 レベル 3 有効 禁止 ※初期値 222 サービスモード時の動作速度制限 ロボット動作速度の最高速を規定します。 設定値 ※ 内容 <3% ロボット動作を最高速度の 3% 以下にする。 <100% ロボット動作に速度制限を行わない。 ※初期値 333 サービスモード時の操作デバイス制御 操作可能なデバイスを指定します。 設定値 ※ RPB 内容 RPB-E の操作のみを有効とする。 RPB/DI RPB-E と専用入力を有効とする。 RPB/COM RPB-E とオンライン命令を有効とする。 ALL RPB-E と専用入力とオンライン命令の操作デバイスを有効とする。 ※初期値 c 2-12 注意 シリアルボード接続状態では、専用入力は SI となります。 2. EMC 対策例 EMC 指令に関して、ヤマハロボットを含むお客様の最終製品(装置全体)が対象となります。 弊社としては、ヤマハロボット単体(コントローラ、ロボット、周辺機器)にてモデルを決定し、EMC 指令の 関連規格に適合させています。 EMC 指令に適合させるために、お客様の最終製品(装置全体)で適当な EMC 対策を実施してください。参考 として、ヤマハロボット単体に対する EMC 対策例を示します。 2.1 RCX240 2.1.1 構成 c 注意 下図においてコントローラに近いフェライトコアやノイズフィルタは、なるべくコントローラ側に寄せて配置してください。また、ロボッ トに近いフェライトコアは、なるべくロボット側に寄せて配置してください。 対策部品の配置例 電源 (200∼230V) アース L N L1 N1 RCX240 ROB I/O XY ZR MOTOR XM YM ZM RM STD.DIO OP.DIO NETWORK RPB COM ロボット 単軸 直交 スカラ P&P I/O回路 ネットワーク RPB-E RS-232C SAFETY 外部安全回路 RGEN 回生ユニット 記号の意味 :ノイズフィルタ NF2020A-UP :双信電機 (株) 製 :フェライトコア ZCAT3035-1330 :TDK (株) 製 :フェライトコア ZCAT2132-1130 :TDK (株) 製 :フェライトコア ZCAT2032-0930 :TDK (株) 製 :フェライトコア TFT-274015S :竹内工業 (株) 製 :フェライトコア SFT-72SNB-026K :竹内工業 (株) :フェライトコア 1ターン :フェライトコア 2ターン 91204-R6-00 2-13 2 RCXシリーズ c 注意 ここで示される例は、弊社の設置条件で試験された場合の対策方法です。お客様の装置に弊社製品を組み込んだ場合は、設置条件の違いに より試験結果が変わることが予想されます。 2.1.2 対策部品 ■ ■ サージアブソーバ RCX240 は外部サージアブソーバが無くても対応できますが、さらにサージ耐性を高めたいお客様は、AC 電源ラインにサー ジアブソーバを設置してください。 弊社推奨のサージアブソーバは以下のとおりです。 ●推奨品サージアブソーバ メーカ:双信電機株式会社 型式 :LT-C12G801WS RCXシリーズ 外形寸法図 .3 +0 -0 .3 .1 4 25 ±1.0 緑 (green) :正常 (normal) 赤 (red) :故障 (abnormal) 33.5 ±1.0 動作表示 Status indicator φ4 19 ±1.0 Wire (earth) (Green/Yellow) 28 ±1.0 250 +25 -0 Wire (line) (Black) 22.5 ±1.0 4 ±0.5 2 38 ±1.0 単位:mm 91205-R6-00 2-14 ■ ■ ノイズフィルタ AC 電源ラインにノイズフィルタを必ず設置してください。 弊社推奨のノイズフィルタは以下のとおりです。 ●推奨ノイズフィルタ メーカ:双信電機株式会社 型式 :NF2020A-UP 2 外形寸法図 (5) 40±1 (28.8) 70±0.5 R2.25 長さ6 RCXシリーズ 85±1 (71.6) 10 50±1 40±0.5 34±0.5 (18) 6-M4 φ4.5 (1) (5) (2) (3) (4) No. 名称 Part name 備考 Note (1) 入力端子 Input terminal M4 (2) ケース Case PBT (3) 銘板 Name plate (4) 出力端子 Output terminal M4 (5) 接地端子 Earth terminal M4 単位:mm 91206-R6-00 2-15 ■ ■ フェライトコア お客様の最終製品(装置全体)に合わせ、フェライトコアの設置を行ってください。 弊社推奨のフェライトコアは以下のとおりです。 ●推奨フェライトコア 1 2 メーカ:TDK 株式会社 型式 :ZCAT3035-1330 外形寸法図 RCXシリーズ 39.0±1 34.0±1 30.0±1 13.0±1 単位:mm 91207-R6-00 ●推奨フェライトコア 2 メーカ:TDK 株式会社 型式 :ZCAT2132-1130 外形寸法図 36.0±1 32.0±1 20.5±1 11.0±1 単位:mm 91208-R6-00 ●推奨フェライトコア 3 メーカ:TDK 株式会社 型式 :ZCAT2032-0930 外形寸法図 36.0±1 32.0±1 19.5±1 9.0±1 単位:mm 91209-R6-00 2-16 ●推奨フェライトコア 4 メーカ:竹内工業株式会社 型式 :TFT-274015S 外形寸法図 20.7 2 RCXシリーズ (90.1) 43.8 40.0 φ43.8 φ27.4 フェライト 樹脂ケース クランプ使用状態 単位:mm 91210-R6-00 ●推奨フェライトコア 5 メーカ:竹内工業株式会社 型式 :SFT-72SNB-026K 40.4 28.0 35.6 外形寸法図 (61.3) 29.4 29.4 25.0 φ12.2 フェライト 樹脂ケース クランプ使用状態 単位:mm 91211-R6-00 2-17 2.2 RCX221/RCX222 2.2.1 構成 c 2 注意 下図においてコントローラに近いフェライトコアやノイズフィルタは、なるべくコントローラ側に寄せて配置してください。また、ロボッ トに近いフェライトコアは、なるべくロボット側に寄せて配置してください。 対策部品の配置例 RCXシリーズ 電源 (200∼230V) アース RCX221/RCX222 ROB I/O XY L MOTOR N XM L1 YM N1 OP.DIO NETWORK RPB COM ロボット 単軸 直交 P&P I/O回路 ネットワーク RPB-E RS-232C SAFETY 外部安全回路 RGEN 回生ユニット 記号の意味 :ノイズフィルタ MBS1215-22 :TDKラムダ (株) 製 :フェライトコア ZCAT3035-1330 :TDK (株) 製 :フェライトコア ZCAT2132-1130 :TDK (株) 製 :フェライトコア ZCAT2032-0930 :TDK (株) 製 :フェライトコア 1ターン :フェライトコア 2ターン 91203-R1-00 2-18 2.2.2 対策部品 ■ ■ サージアブソーバ RCX221/RCX222 は外部サージアブソーバが無くても対応できますが、さらにサージ耐性を高めたいお客様は、AC 電源 ラインにサージアブソーバを設置してください。 弊社推奨のサージアブソーバは以下のとおりです。 2 ●推奨サージアブソーバ メーカ:双信電機株式会社 型式 :LT-C12G801WS RCXシリーズ 外形寸法図 .3 +0 -0 .3 .1 4 25 ±1.0 緑 (green) :正常 (normal) 赤 (red) :故障 (abnormal) 33.5 ±1.0 動作表示 Status indicator φ4 19 ±1.0 Wire (earth) (Green/Yellow) 22.5 ±1.0 4 ±0.5 28 ±1.0 250 +25 -0 Wire (line) (Black) 38 ±1.0 単位:mm 91204-R1-00 2-19 ■ ■ ノイズフィルタ AC 電源ラインにノイズフィルタを必ず設置してください。 弊社推奨のノイズフィルタは以下のとおりです。 ●推奨ノイズフィルタ メーカ:TDK ラムダ株式会社 型式 :MBS-1215-22 2 外形寸法図 C L RCXシリーズ 105±0.5 C L 36 18±0.5 C L 1 3 NAME PLATE 2 4 65±1 8- φ4.8 (Mounting holes) 45±0.5 5-M4 12 27 22MAX 95±1 115±1 22MAX 40±1 ケース:鉄 単位:mm 91205-R1-00 2-20 ■ ■ フェライトコア お客様の最終製品(装置全体)に合わせ、フェライトコアの設置を行ってください。 弊社推奨のフェライトコアは以下のとおりです。 ● 推奨フェライトコア 1 メーカ:TDK 株式会社 型式 :ZCAT3035-1330 2 外形寸法図 34.0±1 30.0±1 RCXシリーズ 39.0±1 13.0±1 単位:mm 91206-R1-00 ● 推奨フェライトコア 2 メーカ:TDK 株式会社 型式 :ZCAT2132-1130 外形寸法図 36.0±1 32.0±1 20.5±1 11.0±1 単位:mm 91207-R1-00 ● 推奨フェライトコア 3 メーカ:TDK 株式会社 型式 :ZCAT2032-0930 外形寸法図 36.0±1 32.0±1 19.5±1 9.0±1 単位:mm 93208-R1-00 2-21 3. 外部安全回路例 ここでは、RPB-E を使用したカテゴリ別安全回路構成例を説明します。 ロボットをより安全にご使用いただくために、各コントローラの回路例を参考に、お客様に合った安全対策を 実施してください。 2 3.1 パフォーマンスレベル RCXシリーズ 機械指令への適合には、安全回路に求められる性能「パフォーマンスレベル(PL)」の評価が必要となります。 パフォーマンスレベル(PL)は、以下のパラメータにより決定されます。 ● パフォーマンスレベルの主な決定要素 1.カテゴリ(Category) 2.MTTFd(Mean Time To Dangerous Failure): 危険側平均故障時間 3.DCavg(Average Diagnostic Coverage ) :平均診断率 4.CCF(Common Cause Failure) :共通原因故障への対策(チェックリストのスコアが 65 点以上か?) (各部品のデータは、部品製造者から入手してください。) 安全回路のパフォーマンスレベル(PL)を決定するには、下記の流れとなります。 ● パフォーマンスレベル決定の流れ 1.リスクアセスメントにより、「安全回路に要求されるパフォーマンスレベル(PLr)」を決定する。 2.PLr を満足するためのカテゴリ(Category)の要求事項を満足する安全回路を構築する。 3.安全回路に使用する機器の MTTFd、DCavg、CCF から安全回路の「パフォーマンスレベル(PL)」を算出し、「安全回 路に要求されるパフォーマンスレベル(PLr)」と同等あるいはそれ以上のレベルになっていることを確認する(PLr ≦ PL)。 お客様の最終装置において、リスクアセスメントにより安全回路に要求されるパフォーマンスレベル (PLr)を決定し、それに応じたパフォーマンスレベル(PL)の安全回路を構築してください。 2-22 3.2 RCX240 回路例 RCX240 のカテゴリ別安全回路構成例を示します。 ロボットをより安全にご使用いただくために、各安全回路構成例を参考に、お客様の装置に合った安全対策を 実施してください。 ここでは、以下の入出力信号を備えた例となっております。 リセットスイッチ、メンテナンスモードスイッチ、ドアスイッチ、外部非常停止 出力 プログラミングボックス非常停止出力、イネーブル出力 2 注意 パラレル I/O とシリアル I/O の、アラーム信号などのコントローラの状態を出力する信号などは、上位機器にて監視してください。 全体接続図(イネーブルスイッチ付き) L1 N1 安全回路 L1 AC IN N1 AC OUT RPB-E コントローラ (PNP仕様) L N 非常停止 イネーブル RPB SAFETY リセット 3 4 5 6 7 8 9 10 メンテナンス ドア 外部非常停止 OUT 1 安全出力 13 14 15 16 17 18 19 20 SERVICE(DI02) 11 P.COM アラームで主電源を切断する場合 のコントローラ正常チェック配線 2 KA1 P.COMDI +5V MPRDY MPRDY ステータス 12 N.COM 13 E-STOP24V N.COMDI 内部+24V E-STOP ステータス 14 E-STOPRDY アラームで主電源を切断しない場合 のコントローラ正常チェック配線 +24V KA1 GND +24V +24V_GND STD.DIO 27 29 47 48 49 50 +24V GND GND COMMON CPU_OK(a接) P.COMDI N.COMDI GND To PLC 入出力信号 91212-R6-00 2-23 RCXシリーズ c 入力 参考:イネーブルスイッチ無し(カテゴリB) L1 N1 安全回路 RPB コントローラ (PNP仕様) L N 外部非常停止 非常停止 RPB SAFETY 3 4 2 13 14 AUTO SERVICE メンテナンス スイッチ RCXシリーズ 1 SERVICE(DI02) P.COMDI +5V 11 P.COM 2 MPRDY MPRDY ステータス 12 N.COM 13 E-STOP24V N.COMDI 内部+24V 14 E-STOPRDY E-STOP ステータス GND +24V +24V_GND STD.DIO 27 29 +24V 47 48 49 50 +24V GND GND COMMON CPU_OK(a接) P.COMDI N.COMDI GND To PLC 入出力信号 91213-R6-00 2-24 3.2.1 カテゴリ 4 カテゴリ 4 の安全回路構成例を示します。 カテゴリ4の安全回路構成例 KM1 AC IN KM2 L AC OUT N L1 N1 リセット スイッチ S1 RCXシリーズ AUTO SERVICE メンテナンス スイッチ GND GND +24V サービス1 サービス2 入力1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ 入力1 S3 入力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 A S14 S24 S44 S54 +24V KA1 KA2 KA3 B GND SAFETY GND E-STOP24V E-STOPRDY MPRDY *1 N.COM T41 T42 +24V SRL2 L2 L1 A2 T31 T32 T33 T11 T12 T21 T22 Y1 外部 非常停止 入力1 S4 入力2 T41 T42 SAFETY SRL3 RPB-E 非常停止 T11 T12 T21 T22 Y1 入力1 入力2 SRL4 RPB-E イネーブル 入力1 入力2 +24V +24V GND T11 T12 T21 T22 T23 A B サービス1 サービス2 SERVICE(DI02) P.COM S14 S24 S34 S44 S54 OUT +24V KA4 KA5 RPB-E 非常停止 出力1 L1 A2 T31T32 T33 出力2 S14 S24 GND T31 T32 13 14 23 24 33 34 43 44 GND RPB-E イネーブル 出力1 出力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91214-R6-00 部品表 回路番号 S1 S2 S3 S4 KM1, 2 KA1 ~ 5 SRL1 SRL2 SRL3 SRL4 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D18 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-AD322 G9SX-BC202 G9SA-501 2 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 2-25 3.2.2 カテゴリ 3 カテゴリ 3 の安全回路構成例を示します。 カテゴリ3の安全回路構成例 KM1 KM2 L1 AC IN N1 2 L AC OUT N リセット スイッチ S1 RCXシリーズ AUTO SERVICE メンテナンス スイッチ GND GND +24V サービス1 サービス2 入力1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ 入力1 S3 入力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 A S14 S24 S44 S54 +24V KA1 KA2 KA3 B GND SAFETY GND E-STOP24V E-STOPRDY MPRDY *1 N.COM T41 T42 サービス1 サービス2 SERVICE(DI02) P.COM 外部 非常停止 入力1 S4 入力2 OUT +24V SAFETY SRL2 RPB-E 非常停止 T11 T12 T21 T22 Y1 入力1 入力2 SRL3 RPB-E イネーブル 入力1 入力2 +24V +24V GND T11 T12 T21 T22 T23 A B KA4 KA5 RPB-E 非常停止 出力1 L1 A2 T31T32 T33 出力2 S14 S24 GND T31 T32 13 14 23 24 33 34 43 44 GND RPB-E イネーブル 出力1 出力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91215-R6-00 部品表 回路番号 S1 S2 S3 S4 KM1, 2 KA1 ~ 5 SRL1 SRL2 SRL3 2-26 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D18 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-BC202 G9SA-501 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 3.2.3 カテゴリ 2 カテゴリ 2 の安全回路構成例を示します。 カテゴリ2の安全回路構成例 KM1 L1 AC IN N1 L AC OUT N リセット スイッチ S1 RCXシリーズ AUTO SERVICE メンテナンス スイッチ GND +24V サービス1 サービス2 入力1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 +24V M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 S3 入力1 イネーブル11 A S14 S24 S44 S54 +24V KA1 KA2 B SAFETY GND E-STOP24V E-STOPRDY MPRDY *1 N.COM T41 T42 +24V SRL2 外部 非常停止 T11 T12 T21 T22 Y1 S4 入力1 SAFETY RPB-E 非常停止 +24V サービス1 サービス2 L1 A2 T31 T32 T33 SERVICE(DI02) P.COM S14 S24 +24V OUT RPB-E 非常停止 出力1 入力1 入力2 RPB-E イネーブル +24V 入力1 イネーブル11 RPB-E イネーブル 出力1 入力2 +24V +24V GND GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91216-R6-00 部品表 回路番号 S1 S2 S3 S4 KM1 KA1, 2 SRL1 SRL2 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D18 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-BC202 2 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 2-27 3.2.4 回路動作概略 前項で示した各安全回路構成例の回路動作の概略を説明します。 111 自動運転時 イネーブルスイッチが無効となり、コントローラの内部アラーム発生がない正常状態(MPRDY が ON)で、かつ以下の条 件がすべて満たされた場合のみ、主電源を供給します。 2 条件 ・メンテナンスモードスイッチが AUTO(M1:開、M2:閉)。 ・ドアスイッチの NC 接点が閉じている。 RCXシリーズ ・外部非常停止ボタンの NC 接点が閉じている。 ・RPB-E の非常停止ボタンの NC 接点が閉じている。 c 注意 コントローラ前面の RPB コネクタに RPB ターミネータもしくは RPB-E を接続してください。コントローラ前面の RPB コネクタがオープン の場合、非常停止状態となります。 222 メンテナンス時 ドアスイッチが無効となり、コントローラの内部アラーム発生がない正常状態(MPRDY が ON)で、かつ以下の条件がす べて満たされた場合のみ、主電源を供給します。 条件 ・メンテナンスモードスイッチが SERVICE(M1:閉、M2:開)。 ・外部非常停止ボタンの NC 接点が閉じている。 ・RPB-E の非常停止ボタンの NC 接点が閉じている。 ・RPB-E のイネーブルスイッチの NO 接点が閉じている。 c 2-28 注意 必ず、コントローラ前面の RPB コネクタから RPB ターミネータを外し、PRB-E を接続してください。 3.3 RCX221/RCX222 回路例 RCX221/RCX222 のカテゴリ別安全回路構成例を示します。 ロボットをより安全にご使用いただくために、各安全回路構成例を参考に、お客様の装置に合った安全対策を 実施してください。 ここでは、以下の入出力信号を備えた例となっております。 リセットスイッチ、メンテナンスモードスイッチ、ドアスイッチ、外部非常停止 出力 プログラミングボックス非常停止出力、イネーブル出力 2 注意 パラレル I/O とシリアル I/O の、アラーム信号などのコントローラの状態を出力する信号などは、上位機器にて監視してください。 全体接続図(イネーブルスイッチ付き) L1 N1 安全回路 L1 AC IN N1 AC OUT RPB-E コントローラ (PNP仕様) L N 非常停止 イネーブル RPB SAFETY リセット メンテナンス ドア 外部非常停止 OUT 安全出力 GND +24V アラームで主電源を切断する場合 のコントローラ正常チェック配線 KA1 13 14 15 16 17 18 19 20 DI.COM INTERLOCK SERVICE(DI02) 4 DO.COM 5 6 MPRDY SERVO OUT 11 E-STOP24V 内部+24V 12 E-STOPRDY GND STD.DIO 電源コネクタ+24V_GND 1 +24V 2 +24V +24V GND GND 13 14 15 16 17 18 19 20 1 2 3 アラームで主電源を切断しない場合 のコントローラ正常チェック配線 E-STOP ステータス GND +24VG IOコネクタ 17 CPU OK KA1 GND To PLC 入出力信号 91209-R1-00 2-29 RCXシリーズ c 入力 参考:イネーブルスイッチ無し(カテゴリB) L1 N1 安全回路 RPB コントローラ (PNP仕様) L N 外部非常停止 非常停止 RPB SAFETY 13 14 2 AUTO SERVICE メンテナンス スイッチ 13 14 RCXシリーズ 1 DI.COM 2 3 INTERLOCK SERVICE(DI02) GND +24V +24V 4 DO.COM 5 6 MPRDY SERVO OUT 11 E-STOP24V 内部 +24V 12 E-STOPRDY +24V STD.DIO 電源コネクタ+24V_GND 1 +24V 2 GND +24V GND GND E-STOP ステータス GND +24VG IOコネクタ 17 CPU OK To PLC 入出力信号 91210-R1-00 2-30 3.3.1 カテゴリ 4 カテゴリ 4 の安全回路構成例を示します。 カテゴリ4の安全回路構成例 KM1 AC IN KM2 L AC OUT N L1 N1 リセット スイッチ S1 GND RCXシリーズ AUTO SERVICE メンテナンス スイッチ GND +24V 入力1 サービス1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 M1 M2 OUT ON OFF B OFF ON A 入力1 S3 入力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 +24V T31 T32 T33 ドア スイッチ A KA1 S14 S24 S44 S54 KA2 KA3 B GND +24V GND T41 T42 SRL2 外部 非常停止 T11 T12 T21 T22 Y1 入力1 S4 入力2 L2 L1 A2 T31 T32 T33 SRL3 RPB-E 非常停止 T11 T12 T21 T22 Y1 入力1 入力2 SRL4 RPB-E イネーブル 入力1 入力2 +24V +24V GND T11 T12 T21 T22 T23 A B サービス1 S14 S24 S34 S44 S54 SAFETY E-STOP24V E-STOPRDY DO.COM MPRDY *1 INTERLOCK SERVICE(DI02) DI.COM GND OUT T41 T42 SAFETY INTERLOCK信号 未使用の場合 GND +24V +24V KA4 KA5 RPB-E 非常停止 出力1 L1 A2 T31 T32 T33 出力2 S14 S24 GND T31 T32 13 14 23 24 33 34 43 44 GND RPB-E イネーブル 出力1 出力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91211-R1-00 部品表 回路番号 S1 S2 S3 S4 KM1, 2 KA1 ~ 5 SRL1 SRL2 SRL3 SRL4 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D18 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-AD322 G9SX-BC202 G9SA-501 2 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 2-31 3.3.2 カテゴリ 3 カテゴリ 3 の安全回路構成例を示します。 カテゴリ3の安全回路構成例 KM1 2 AC IN KM2 L1 N1 L AC OUT N リセット スイッチ S1 RCXシリーズ AUTO SERVICE メンテナンス スイッチ GND GND +24V 入力1 サービス1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 M1 M2 OUT ON OFF B OFF ON A 入力1 S3 入力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 +24V T31 T32 T33 ドア スイッチ A KA1 S14 S24 S44 S54 KA2 KA3 B GND +24V GND T41 T42 INTERLOCK信号 未使用の場合 GND サービス1 外部 非常停止 入力1 SAFETY E-STOP24V E-STOPRDY DO.COM MPRDY *1 INTERLOCK SERVICE(DI02) DI.COM GND S4 入力2 OUT +24V SAFETY SRL2 RPB-E 非常停止 T11 T12 T21 T22 Y1 入力1 入力2 SRL3 RPB-E イネーブル 入力1 入力2 +24V +24V GND T11 T12 T21 T22 T23 A B KA4 KA5 RPB-E 非常停止 出力1 L1 A2 T31 T32 T33 出力2 S14 S24 GND T31 T32 13 14 23 24 33 34 43 44 GND RPB-E イネーブル 出力1 出力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91212-R1-00 部品表 回路番号 S1 S2 S3 S4 KM1, 2 KA1 ~ 5 SRL1 SRL2 SRL3 2-32 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D18 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-BC202 G9SA-501 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 3.3.3 カテゴリ 2 カテゴリ 2 の安全回路構成例を示します。 カテゴリ2の安全回路構成例 KM1 AC IN L1 N1 L AC OUT N リセット スイッチ S1 RCXシリーズ AUTO SERVICE メンテナンス スイッチ GND +24V 入力1 サービス1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 +24V M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 S3 入力1 イネーブル11 A +24V S14 S24 S44 S54 KA1 KA2 B +24V GND T41 T42 +24V +24V SRL2 外部 非常停止 T11 T12 T21 T22 Y1 S4 入力1 SAFETY GND INTERLOCK信号 未使用の場合 L1 A2 T31 T32 T33 サービス1 SAFETY E-STOP24V E-STOPRDY DO.COM MPRDY *1 INTERLOCK SERVICE(DI02) DI.COM S14 S24 +24V RPB-E 非常停止 OUT 入力1 RPB-E 非常停止 出力1 入力2 RPB-E イネーブル +24V 入力1 イネーブル11 RPB-E イネーブル 出力1 入力2 +24V +24V GND GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91213-R1-00 部品表 回路番号 S1 S2 S3 S4 KM1 KA1, 2 SRL1 SRL2 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D18 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-BC202 2 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 2-33 3.3.4 回路動作概略 前項で示した各安全回路構成例の回路動作の概略を説明します。 111 自動運転時 イネーブルスイッチが無効となり、コントローラの内部アラーム発生がない正常状態(MPRDY が ON)で、かつ以下の条 件がすべて満たされた場合のみ、主電源を供給します。 2 条件 ・メンテナンスモードスイッチが AUTO(M1:開、M2:閉)。 ・ドアスイッチの NC 接点が閉じている。 RCXシリーズ ・外部非常停止ボタンの NC 接点が閉じている。 ・RPB-E の非常停止ボタンの NC 接点が閉じている。 c 注意 コントローラ前面の RPB コネクタに RPB ターミネータもしくは RPB-E を接続してください。コントローラ前面の RPB コネクタがオープン の場合、非常停止状態となります。 222 メンテナンス時 ドアスイッチが無効となり、コントローラの内部アラーム発生がない正常状態(MPRDY が ON)で、かつ以下の条件がす べて満たされた場合のみ、主電源を供給します。 条件 ・メンテナンスモードスイッチが SERVICE(M1:閉、M2:開)。 ・外部非常停止ボタンの NC 接点が閉じている。 ・RPB-E の非常停止ボタンの NC 接点が閉じている。 ・RPB-E のイネーブルスイッチの NO 接点が閉じている。 c 2-34 注意 必ず、コントローラ前面の RPB コネクタから RPB ターミネータを外し、PRB-E を接続してください。 第 3 章 SR1シリーズ 目次 1. システムの概要 1.1 システム概要 3-1 3-1 1.1.1 主なシステム構成 3-1 1.2 3-2 コントロールシステム構成 1.2.1 基本構成 1.2.2 電源および非常停止系回路構成 3-2 3-3 1.3 プログラミングボックス(HPB-D) 3-4 1.3.1 各部の名称と機能 1.3.2 HPB コネクタと HPB-D セイフティ用コネクタ 3-4 3-5 1.4 3-6 サービスモード 1.4.1 サービスモードとは 1.4.2 サービスモードの機能を有効にするための流れ 1.4.3 サービスモードの安全制御について 2. EMC 対策例 2.1 SR1 2.1.1 構成 2.1.2 対策部品 3. 外部安全回路例 3-6 3-6 3-7 3-8 3-8 3-8 3-9 3-12 3.1 パフォーマンスレベル 3-12 3.2 SR1 回路例 3-13 3.2.1 3.2.2 3.2.3 3.2.4 カテゴリ 4 カテゴリ 3 カテゴリ 2 回路動作概略 3-15 3-16 3-17 3-18 1. システムの概要 1.1 システム概要 1.1.1 主なシステム構成 ■ ■ SR1 システムの概要 3 プログラミングボックス HPB-D SR1シリーズ SD メモリカード SD MEMORY CARD SR1コントローラ サポートソフト POPCOM ERR PWR MOTOR または HPB U V W RS-232C 通信制御 I/O制御 I/O BAT AC IN パソコン ROB I/O L ※ プログラミングボックス HPB-Dおよびサポートソフ トPOPCOMは別売りです。 N L1 N1 RGEN P SAFETY N チャック、 リミットスイッチなど SHORT: AC100V OPEN: AC200V 単軸ロボット Xシリーズ 外部制御 (シーケンサなど) 外部非常停止回路 非常停止ボタン 安全リレー 安全ドアスイッチ など 91301-Q6-00 3-1 1.2 コントロールシステム構成 1.2.1 基本構成 コントロールシステムの基本ブロック図を示します。 ■ ■ SR1 基本ブロック図 3 I/O OPTION BOARD MOTHER BOARD ASSY SR1シリーズ HPB ROB I/O BAT *1 CONTROL BOARD ASSY SAFETY MONITOR I/O ACIN RGEN DRIVER POWER BOARD ASSY AC VOLTAGE SELECT FAN MOTOR ASSY *2 MOTOR DRIVER2 BOARD ASSY FG *1:SR1-Xのみ実装 *2:SR1-X-20、SR1-P-20のみ実装 91302-Q6-00 3-2 1.2.2 電源および非常停止系回路構成 コントロールシステムの電源系および非常停止系回路ブロック図を示します。 電源系・非常停止系回路ブロック図 Emergency stop button ※4 ABS BATTERY +3.6V HPB-D ※2 HPB CONTROL CIRCUIT BLOCK 3 Enable switch POSITION BACKUP CIRCUIT CPU Position Data SAFETY ※3 HPB-D SAFETY SR1シリーズ ROBOT I/O MOTOR MOTOR RELAY1 MOTOR DRIVE CIRCUIT +24V External emergency stop circuit DC5V,12V,15V (User equipment) DC280V REALY2 AC200 ∼ 230V IN MAIN MOTOR POWER CIRCUIT L N FUSE L1 CONTROL N1 OPEN AC200V GND FUSE CONTROL POWER CIRCUIT DC5V ※1 DC12V DC24V ※2 POWER CIRCUIT BLOCK ※1)絶縁トランスにより入力電源と各制御電源は 絶縁されている。 ※2)DC3.6V、DC5V、DC12V、DC24Vの0Vライ ンは保護アースに接続されていない。 ※3)HPB-Dからの配線図は、HPB-Dのコネクタ 入出力信号表を参照してください。 ※4)SR1-Pを除く。 91303-Q6-00 3-3 1.3 プログラミングボックス(HPB-D) プログラミングボックス(HPB-D)は、コントローラと接続して各種操作を行う専用装置です。ロボットの手 動操作、プログラミングの入力や編集、ティーチング、パラメータ設定など、すべての操作をこの装置で行い ます。 1.3.1 各部の名称と機能 HPB-D 上には非常停止ボタンとイネーブルスイッチが装着されています。これらの接点出力は、HPB-D 下部の セイフティ用コネクタより、設備全体の非常停止回路に接続できるようになっています。 HPB-D 3 (背面) SR1シリーズ 3. 非常停止ボタン 1. 液晶表示部 4. イネーブルスイッチ 2. 操作キー 5. HPBコネクタ 6. HPB-D セイフティ用コネクタ 91304-Q6-00 ●主な機能 No. 3-4 名称 機能 1 液晶表示部 20 桁 ×4 行の液晶(LCD)ディスプレイで、各種情報を表示します。 2 操作キー ロボットを動作させたり、プログラムの入力などを行うためのキースイッチです。 ファンクションキー、データ入力/操作キーの 2 グループに大別されます。 3 非常停止ボタン ロボットの動作中にこのボタンを押すと、ロボットは非常停止します。B 接点(NC 接点)タイプの スイッチです。 オムロン㈱製 A165E-S-02 使用 4 イネーブルスイッチ 3 ポジションスイッチです。 安全性を考慮したスイッチで、中間押し状態でのみロボット操作が可能です。 HPB-D セイフティ用コネクタの LOCKIN1 ~ 4 が配線未接続状態では、本スイッチの機能は使用で きません。 スイッチの状態とロボットの動作状態が以下のようになるよう外部で安全回路を構築してください。 スイッチ解放状態 :非常停止状態 スイッチ中間押状態 :動作可能状態 スイッチ押込状態 :非常停止状態 オムロン㈱製 A4E-B200HS 使用 5 HPB コネクタ コントローラと接続するためのコネクタです。 6 HPB-D セイフティ 用コネクタ 非常停止ボタンとイネーブルスイッチの接点出力が接続されています。 付属の 15 ピン D-sub コネクタ ( メス ) をそのままセイフティ用コネクタに取り付けますと、非常停 止ボタンのみ有効になります。 1.3.2 HPB コネクタと HPB-D セイフティ用コネクタ HPB-D 上には非常停止ボタンとイネーブルスイッチが装着されています。これらの接点出力は、コントローラ の SAFETY コネクタおよび HPB-D セイフティ用コネクタにより設備全体の非常停止回路に接続できるように なっています。 ここでは、信号の接続について説明します。 c 注意 ・ケーブルおよびコネクタの変更・改造は行わないでください。HPB コネクタおよび HPB-D セイフティ用コネクタにはプログラミングボッ クス制御用入出力信号のほかに、外部安全回路構築のための信号が含まれており、ケーブルおよびコネクタの変更・改造を行うと大変危 険です。 ・必ずコントローラの SAFETY コネクタおよび HPB-D セイフティ用コネクタを用いて外部安全回路を構築してください。 3 各ピンの対応は以下のとおりです。 SR1 SAFETY コネクタ 名称 ピン番号 EMG1 11 EMG2 - HPB-D HPB コネクタ 備考 ピン番号 名称 内部 +24V - - 12 1対1 9 セイフティ用コネクタ 14 番ピンと 内部連結 - E-STOP ステータス回路入力 6 セイフティ用コネクタ 15 番ピンと 内部連結 セイフティ用コネクタ 備考 ピン番号 名称 1 E-STOPIN1 2 E-STOPIN2 3 E-STOPIN3 4 E-STOPIN4 5 LCKIN1 6 LCKIN2 7 LCKIN3 8 LCKIN4 14 HPB EMG2 HPB コネクタ 9 番ピンと内部連結 15 HPB EMG1 HPB コネクタ 6 番ピンと内部連結 非常停止接点 系統 1 非常停止接点 系統 2 イネーブル接点 系統 1 イネーブル接点 系統 2 回路図 HPB-D SR1 非常停止 11 12 1∼5,7,8 6 E-STOPステータス 9 HPB 14 15 1 2 3 4 5 6 7 8 内部+24V SAFETY イネーブル HPB-D SAFETY 91305-Q6-00 3-5 SR1シリーズ コントローラ 内部接続 1.4 サービスモード ここでは、サービスモードについて説明します。 1.4.1 サービスモードとは サービスモードとは、ロボットシステムの安全保護策内で、HPB-D による作業を安全に行うときに使用するこ とができるモードです。 3 ロボットのメンテナンスや調整などをするために、安全保護柵内の危険区域に入って、HPB-D でロボットを動 かさなければならないことがあります。このようなとき、特に安全を配慮する必要があります。(以下、この状 況のことを「サービスモード状態」と呼びます。) サービスモード状態では、作業者の安全のために、コントローラの動作に制限を設けたい場合があります。サー ビスモード状態になった場合に、コントローラに安全上の動作制限をかける機能をサービスモード機能といい ます。 SR1シリーズ サービスモード機能を使用するには、サービスモード機能の設定を「有効」にする必要があります。サービスモー ド機能の有効/無効設定は、HPB-D のメニュー選択または PRM372(サービスモード有効設定パラメータ)で 行います。 サービスモード機能が「有効」に設定されると、コントローラは常にサービスモード状態かどうかを監視します。 サービスモード状態であるかないかは、サービスモード入力(SVCE)で知らせます。SVCE の接点が開いてい る(OFF)とサービスモード状態であることを意味します。 I/O ユニットがシリアル I/O の場合は、SAFETY コネクタの SVCE とシリアル I/O の SVCE のいずれか一方で も接点が開いている(OFF)とサービスモード状態であることを意味します。(SAFETY コネクタの SVCE とシ リアル I/O の SVCE の接点が両方とも閉じている(ON)ときのみサービスモード状態ではないということにな ります。) サービスモード状態で、サービスモード機能が「有効」に設定されていると、下記の安全制御が働きます。 ●サービスモード状態で働く安全制御 ・ HPB-D 以外からの命令入力を制限 ・ ロボットの動作速度制限 ・ 自動運転・ステップ運転の禁止 ・ Hold-to-run 機能 (Hold-to-run 機能とは、HPB-D のキーを押し続けている間のみロボット動作が有効になる機能です。) サービスモード状態での安全制御の内容は、個々に設定することができます。 n 要点 ・サービスモード入力が変化した場合、プログラム動作中またはジョグ移動中では、一時停止します。 ・SVCE の NPN/PNP 仕様は、DI.COM や DO.COM の入力により決定します。 ・SVCE の入力電流は、8mA 以上の容量が必要です。 1.4.2 サービスモードの機能を有効にするための流れ ・ サービスモード機能の設定が「有効」になっている。 ↓ ・ SVCE の接点を開く(OFF にする) I/O ユニットがシリアル I/O の場合は、SAFETY コネクタの SVCE とシリアル I/O の SVCE のいず れか一方または両方の接点を開く(OFF) ↓ ・ サービスモードの安全制御が働く サービスモード状態での安全制御の内容は、個々に設定することができます。各内容は次項を参照してください。 3-6 1.4.3 サービスモードの安全制御について サービスモード状態のときに機能させることのできる安全制御の設定には次の 4 つがあります。 1.操作デバイスの制限(HPB-D 以外からの命令入力を制限) 2.ロボットの動作速度制限 3.自動運転・ステップ運転の制限(自動運転・ステップ運転の禁止) 4.Hold-to-run 機能 各設定方法は、コントローラの取扱説明書を参照してください。 w 警告 いずれの安全制御も初期値からの設定変更は、ロボット動作に関わる操作を行う作業者に対する危険要因が増すことが予想されます。お客 様の責任で設定変更することは可能ですが、安全に対する十分な配慮のもと行ってください。 111 操作デバイスの制限 設定値 内容 0(初期値) サービスモード状態では、HPB-D からの命令入力のみ許可します。 1 サービスモード状態では、HPB-D およびパラレル I/O からの命令入力のみ許可します。 2 サービスモード状態では、HPB-D およびオプションユニットからの命令入力のみ許可します。 3 サービスモード状態でも命令入力制限を行いません。 222 ロボットの動作速度制限 ロボット動作速度の最高速を規定します。 ロボット安全保護柵内で作業をしている場合、高速でロボットを動作させることは、作業者に対して多大な危険を生じさ せる可能性があります。また、ロボット安全保護柵内での作業は主にロボットのメンテナンスですから、通常はロボット 動作速度を安全速度である 250mm/sec 以下とするのが適切です。そのため、サービスモード状態ではロボットの動作速 度を最高速度の 3% 以下に制限します。 ただし、サービスモード状態においても動作速度を安全速度以上に設定したい場合には、お客様の責任でこの制限を解除 することができます。 設定値 内容 0(初期値) サービスモード状態では、ロボットの動作速度を最高速度の 3% 以下に制限します。 1 サービスモード状態でも、ロボットの動作速度制限を行いません。 333 自動運転・ステップ運転の制限 自動運転・ステップ運転の許可/禁止を決定します。 ロボット安全保護柵内で作業を行っている場合、自動運転やステップ運転を不用意に実行することは、作業者に対して多 大な危険を生じさせる可能性があります。 そのため、サービスモード状態では自動運転やステップ運転は禁止され、実行不可になります。 ただし、サービスモード状態においても自動運転やステップ運転の実行を許可したい場合には、お客様の責任でこの制限 を解除することができます。 設定値 内容 0(初期値) サービスモード状態では、自動運転やステップ運転を禁止します。 1 サービスモード状態でも、自動運転やステップ運転を許可します。 444 Hold-to-run 機能 Hold-to-run 機能の有効/無効を決定します。 ロボット安全保護柵内で作業を行っている場合、作業者が HPB-D を携帯していなくてもロボットが動き続けることは、作 業者に対して多大な危険を生じさせる可能性があります。 そのため、サービスモード状態では Hold-to-run 機能が常に有効になります。 ただし、サービスモード状態においても Hold-to-run 機能を無効にしたい場合には、お客様の責任でこの機能を解除するこ とができます。 設定値 内容 0(初期値) サービスモード状態では、Hold-to-run 機能が有効です。 1 サービスモード状態でも、Hold-to-run 機能を解除します。 3-7 3 SR1シリーズ 操作可能なデバイスを指定します。 ロボット安全保護柵内で HPB-D を操作しているとき、他のデバイス(例えば I/O)の命令入力を許可することは、HPB-D を操作している作業者に多大な危険を生じさせる可能性があります。 そのような危険を避けるため、サービスモード状態では HPB-D が唯一の操作デバイスとして機能し、その他のデバイスに よる命令入力は無効となります。 ただし、サービスモード状態においても他のデバイスの命令入力を許可したい場合には、お客様の責任でこの制限を解除 することができます。 2. EMC 対策例 EMC 指令に関して、ヤマハロボットを含むお客様の最終製品(装置全体)が対象となります。 弊社としては、ヤマハロボット単体(コントローラ、ロボット、周辺機器)にてモデルを決定し、EMC 指令の 関連規格に適合させています。 EMC 指令に適合させるために、お客様の最終製品(装置全体)で適当な EMC 対策を実施してください。参考 として、ヤマハロボット単体に対する EMC 対策例を示します。 c 3 注意 ここで示される例は、弊社の設置条件で試験された場合の対策方法です。お客様の装置に弊社製品を組み込んだ場合は、設置条件の違いに より試験結果が変わることが予想されます。 SR1シリーズ 2.1 SR1 2.1.1 構成 c 注意 下図においてコントローラに近いフェライトコアやノイズフィルタは、なるべくコントローラ側に寄せて配置してください。また、ロボッ トに近いフェライトコアは、なるべくロボット側に寄せて配置してください。 対策部品の配置例 SR1-X/P 電源 (100∼115V) (200∼230V) アース L N L1 N1 ROB I/O MOTOR IO HPB SAFETY RGEN ロボット 単軸 I/O回路又 は ネットワーク HPB-D 外部安全回路 回生 ユニット 記号の意味 :ノイズフィルタ MC1210L:TDKラムダ(株)製 :フェライトコア ZCAT3035-1330:TDK(株)製 :フェライトコア ZCAT2032-0930:TDK(株)製 :フェライトコア 1ターン 91306-Q6-00 3-8 2.1.2 対策部品 ■ ■ サージアブソーバ SR1 は外部サージアブソーバが無くても対応できますが、さらにサージ耐性を高めたいお客様は、AC 電源ラインにサー ジアブソーバを設置してください。 弊社推奨のサージアブソーバは以下のとおりです。 ●推奨品サージアブソーバ メーカ:双信電機株式会社 型式 :LT-C12G801WS 外形寸法図 3 動作表示 Status indicator .3 +0 33.5 ±1.0 -0 .3 .1 4 25 ±1.0 SR1シリーズ 緑 (green) :正常 (normal) 赤 (red) :故障 (abnormal) φ4 19 ±1.0 Wire (earth) (Green/Yellow) 22.5 ±1.0 4 ±0.5 28 ±1.0 250 +25 -0 Wire (line) (Black) 38 ±1.0 単位:mm 91307-Q6-00 3-9 ■ ■ ノイズフィルタ AC 電源ラインにノイズフィルタを必ず設置してください。 弊社推奨のノイズフィルタは以下のとおりです。 ●推奨ノイズフィルタ メーカ:TDK ラムダ株式会社 型式 :MC1210L 外形寸法図 3 SR1シリーズ 単位:mm 91308-Q6-00 3-10 ■ ■ フェライトコア お客様の最終製品(装置全体)に合わせ、フェライトコアの設置を行ってください。 弊社推奨のフェライトコアは以下のとおりです。 ●推奨フェライトコア 1 メーカ:TDK 株式会社 型式 :ZCAT3035-1330 外形寸法図 39.0±1 34.0±1 30.0±1 13.0±1 3 91309-Q6-00 ●推奨フェライトコア 2 メーカ:TDK 株式会社 型式 :ZCAT2032-0930 外形寸法図 36.0±1 32.0±1 19.5±1 9.0±1 単位:mm 91310-Q6-00 3-11 SR1シリーズ 単位:mm 3. 外部安全回路例 ここでは、HPB-D を使用したカテゴリ別安全回路構成例を説明します。 ロボットをより安全にご使用いただくために、回路例を参考に、お客様に合った安全対策を実施してください。 3.1 パフォーマンスレベル 機械指令への適合には、安全回路に求められる性能「パフォーマンスレベル(PL)」の評価が必要となります。 パフォーマンスレベル(PL)は、以下のパラメータにより決定されます。 ● パフォーマンスレベルの主な決定要素 3 1.カテゴリ(Category) 2.MTTFd(Mean Time To Dangerous Failure): 危険側平均故障時間 SR1シリーズ 3.DCavg(Average Diagnostic Coverage ) :平均診断率 4.CCF(Common Cause Failure) :共通原因故障への対策(チェックリストのスコアが 65 点以上か?) (各部品のデータは、部品製造者から入手してください。) 安全回路のパフォーマンスレベル(PL)を決定するには、下記の流れとなります。 ● パフォーマンスレベル決定の流れ 1.リスクアセスメントにより、「安全回路に要求されるパフォーマンスレベル(PLr)」を決定する。 2.PLr を満足するためのカテゴリ(Category)の要求事項を満足する安全回路を構築する。 3.安全回路に使用する機器の MTTFd、DCavg、CCF から安全回路の「パフォーマンスレベル(PL)」を算出し、「安全回 路に要求されるパフォーマンスレベル(PLr)」と同等あるいはそれ以上のレベルになっていることを確認する(PLr ≦ PL)。 お客様の最終装置において、リスクアセスメントにより安全回路に要求されるパフォーマンスレベル (PLr)を決定し、それに応じたパフォーマンスレベル(PL)の安全回路を構築してください。 3-12 3.2 SR1 回路例 SR1 のカテゴリ別安全回路構成例を示します。 ロボットをより安全にご使用いただくために、各安全回路構成例を参考に、お客様の装置に合った安全対策を 実施してください。 ここでは、以下の入出力信号を備えた例となっております。 c 入力 リセットスイッチ、メンテナンスモードスイッチ、ドアスイッチ、外部非常停止 出力 プログラミングボックス非常停止出力、イネーブル出力 注意 パラレル I/O とシリアル I/O の、アラームなどのコントローラの状態を出力する信号などは、上位機器にて監視してください。 3 非常停止 イネーブル 1 2 3 4 5 6 7 8 HPB-D 14 15 9 6 HPB HPB-D SAFETY L1 N1 安全回路 L1 SR1シリーズ 全体接続図(イネーブルスイッチ付き) E-STOP ステータス メンテナンス 1 2 3 GND DI.COM INTERLOCK SERVICE +24V ドア アラームで主電源を切断する 場合のコントローラ正常チェック配線 外部非常停止 GND +24V_GND SAFETY リセット コントローラ (PNP仕様) L N AC OUT AC IN N1 9 6 4 DO.COM 5 MPRDY KA1 OUT 11 EMG1 安全出力 GND 内部+24V 12 EMG2 +24V I/O 1 14 15 26 39 40 +24V GND GND DI.+COM DO.+COM DO.+COM DI.-COM DO.-COM DO.-COM +24V +24VG To PLC 入出力信号 91311-Q6-00 3-13 参考:イネーブルスイッチ無し(カテゴリB) HPB-D 非常停止 9 6 3 HPB L1 N1 SR1シリーズ 安全回路 コントローラ (PNP仕様) 9 6 E-STOP ステータス L N AUTO⇔SERVICE メンテナンス スイッチ +24V +24V +24V_GND SAFETY 1 2 3 GND 外部非常停止 GND DI.COM INTERLOCK SERVICE 4 DO.COM 5 MPRDY 11 EMG1 内部+24V 12 EMG2 I/O +24V 41 1 14 15 26 39 40 GND +24V GND GND READY DI.+COM +24V DO.+COM DO.+COM DI.-COM DO.-COM DO.-COM +24VG To PLC 入出力信号 91312-Q6-00 3-14 3.2.1 カテゴリ 4 カテゴリ 4 の安全回路構成例を示します。 カテゴリ4の安全回路構成例 KM1 KM2 L AC OUT N L1 AC IN N1 リセット スイッチ S1 AUTO⇔SERVICE メンテナンス スイッチ GND 3 GND +24V 入力1 サービス1 M1 M2 入力3 L2 L1 M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ 入力1 S3 入力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 A +24V KA1 S14 S24 S44 S54 KA2 KA3 B GND +24V GND T41 T42 SRL2 T11 T12 T21 T22 Y1 入力1 S4 入力2 L2 L1 A2 T31 T32 T33 SRL3 HPB-D 非常停止 T11 T12 T21 T22 Y1 入力1 入力2 入力1 入力2 +24V +24V GND EMG1 EMG2 DO.COM MPRDY *1 INTERLOCK SERVICE DI.COM GND +24V KA4 HPB-D 非常停止 KA5 出力1 L1 A2 T31 T32 T33 SRL4 HPB-D イネーブル サービス1 S14 S24 S34 S44 S54 SAFETY OUT T41 T42 HPB-D SAFETY INTERLOCK信号 未使用の場合 GND +24V 外部 非常停止 SR1シリーズ S2 入力2 SRL1 T11 T12 T21 T22 T23 A B 出力2 S14 S24 GND T31 T32 13 14 23 24 33 34 43 44 GND HPB-D イネーブル 出力1 出力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91313-Q6-00 部品表 回路番号 S1 S2 S3 S4 KM1, 2 KA1 ~ 5 SRL1 SRL2 SRL3 SRL4 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D09 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-AD322 G9SX-BC202 G9SA-501 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 3-15 3.2.2 カテゴリ 3 カテゴリ 3 の安全回路構成例を示します。 カテゴリ3の安全回路構成例 KM1 KM2 L AC OUT N L1 AC IN N1 リセット スイッチ S1 AUTO⇔SERVICE メンテナンス スイッチ 3 GND GND +24V 入力1 SR1シリーズ サービス1 S2 入力2 SRL1 M1 M2 入力3 L2 L1 M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ 入力1 S3 入力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 A +24V KA1 S14 S24 S44 S54 KA2 KA3 B GND +24V GND T41 T42 INTERLOCK信号 未使用の場合 GND サービス1 外部 非常停止 入力1 SAFETY EMG1 EMG2 DO.COM MPRDY *1 INTERLOCK SERVICE DI.COM GND S4 入力2 OUT +24V HPB-D SAFETY SRL2 HPB-D 非常停止 T11 T12 T21 T22 Y1 入力1 入力2 SRL3 HPB-D イネーブル 入力1 入力2 +24V +24V GND T11 T12 T21 T22 T23 A B KA4 KA5 HPB-D 非常停止 出力1 L1 A2 T31 T32 T33 出力2 S14 S24 GND T31 T32 13 14 23 24 33 34 43 44 GND HPB-D イネーブル 出力1 出力2 イネーブル11 イネーブル12 イネーブル21 イネーブル22 GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91314-Q6-00 部品表 回路番号 S1 S2 S3 S4 KM1, 2 KA1 ~ 5 SRL1 SRL2 SRL3 3-16 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D09 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-BC202 G9SA-501 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 3.2.3 カテゴリ 2 カテゴリ 2 の安全回路構成例を示します。 カテゴリ2の安全回路構成例 KM1 L AC OUT N L1 AC IN N1 リセット スイッチ S1 AUTO⇔SERVICE メンテナンス スイッチ GND 3 +24V 入力1 サービス1 M1 M2 入力3 L2 L1 +24V M1 M2 OUT ON OFF B OFF ON A T31 T32 T33 ドア スイッチ T11 T12 T21 T22 Y1 T61 T62 T71 T72 Y2 S3 入力1 イネーブル11 A +24V S14 S24 S44 S54 KA1 KA2 B +24V GND T41 T42 +24V +24V SRL2 外部 非常停止 T11 T12 T21 T22 Y1 S4 入力1 HPB-D SAFETY HPB-D 非常停止 GND INTERLOCK信号 未使用の場合 L1 A2 T31 T32 T33 サービス1 SAFETY EMG1 EMG2 DO.COM MPRDY *1 INTERLOCK SERVICE DI.COM S14 S24 +24V OUT HPB-D 非常停止 出力1 入力1 入力2 HPB-D イネーブル +24V 入力1 イネーブル11 HPB-D イネーブル 出力1 入力2 +24V +24V GND GND *1:アラームで主電源を切断する場合のコントローラ正常チェック配線 91315-Q6-00 部品表 回路番号 S1 S2 S3 S4 KM1 KA1, 2 SRL1 SRL2 部品名 リセットスイッチ キーセレクタスイッチ セーフティ・ドアスイッチ 非常停止スイッチ コンタクタ(ミラーコンタクト) セーフティリレー セーフティリレー用ソケット セーフティリレーユニット セーフティリレーユニット 型名 A22 シリーズ A22TK シリーズ D4 シリーズ A22E シリーズ LC1-D09 G7SA-3A1B P7SA-10F-ND G9SX-GS226 G9SX-BC202 メーカ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ シュナイダーエレクトリック㈱ オムロン㈱ オムロン㈱ オムロン㈱ オムロン㈱ 3-17 SR1シリーズ S2 入力2 SRL1 3.2.4 回路動作概略 前項で示した各安全回路構成例の回路動作の概略を説明します。 111 自動運転時 イネーブルスイッチが無効となり、コントローラの内部アラーム発生がない正常状態(MPRDY が ON)で、かつ以下の条 件がすべて満たされた場合のみ、主電源を供給します。 条件 ・メンテナンスモードスイッチが AUTO(M1:開、M2:閉)。 ・ドアスイッチの NC 接点が閉じている。 ・外部非常停止ボタンの NC 接点が閉じている。 3 ・HPB-D の非常停止ボタンの NC 接点が閉じている。 c SR1シリーズ 注意 コントローラ前面の HPB コネクタに HPB ダミーコネクタもしくは HPB-D を接続してください。コントローラ前面の HPB コネクタがオープ ンの場合、非常停止状態となります。 222 メンテナンス時 ドアスイッチが無効となり、コントローラの内部アラーム発生がない正常状態(MPRDY が ON)で、かつ以下の条件がす べて満たされた場合のみ、主電源を供給します。 条件 ・メンテナンスモードスイッチが SERVICE(M1:閉、M2:開)。 ・外部非常停止ボタンの NC 接点が閉じている。 ・HPB-D の非常停止ボタンの NC 接点が閉じている。 ・HPB-D のイネーブルスイッチの NO 接点が閉じている。 c 3-18 注意 必ず、コントローラ前面の HPB コネクタから HPB ダミーコネクタを外し、HPB-D を接続してください。 発行 年 月 日 会社名 ヤマハ発動機(株) I M事業部 サービス依頼票 ロボットサービス お客様 サービス依頼票 ご担当 ご住所 TEL 担当: 宛 053-460-6169 FAX 053-460-6811 代理店様 TEL FAX 会社名 ご担当 TEL FAX 依頼内容 □ クレーム対応 □ 電話して欲しい □ 有償修理 □ 出張して欲しい □ 定期点検 □ 不具合品を送るので修理して欲しい □ 修理前見積り □ その他 …………………………………………… 製 品 ロボット本体 シリアル番号 K ……………………………………… コントローラ シリアル番号 ……………………………………… ロボット型式 ……………………………………… コントローラ型式 ……………………………………… エラーメッセージもしくは不具合の症状: ………………………………………………………………………………………………………………………… エラー発生のタイミング: 1. 電源投入直後 不具合内容 エラー発生の頻度: 2. 動作中ランダムに 3. 動作中ある程度決まった位置で 1. 毎回 2. 2∼4時間に一度 3. 4時間から24時間に一度 4. 1日に一度 5. それ以上 その他情報: ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… 特記事項 ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………… S-1 改訂履歴 改訂日付 改訂内容 2011年12月 初版 補足説明書 RCX240/RCX221/RCX222 SR1-X/SR1-P ロボットコントローラ CEマーキング 2011年12月 Version 1.00 ©ヤマハ発動機株式会社 IM事業部 本書の内容の一部もしくは、全てを無断で複写・ 転写することを禁じます。
© Copyright 2026 Paperzz