社団法人 電子情報通信学会
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
信学技報
TECHNICAL REPORT OF IEICE.
インダクタで交差結合した簡単なカオス回路に見られる
同期パターンの調査
内谷
友美子†
西尾 芳文†
† 徳島大学 〒 770-8506 徳島市南常三島 2–1
E-mail: †{uchitani,nishio}@ee.tokushima-u.ac.jp
あらまし
結合カオス回路における同期現象は様々な分野で広く研究されている.本研究では,簡単な回路構成であ
るカオス回路を多数,インダクタで全体的に交差結合させ,発生する同期現象のパターンについて,コンピュータシ
ミュレーション及び回路実験により調査を行った.
キーワード
カオス回路,複雑系,同期現象
Investigation of Synchronization Patterns in
Simple Chaotic Cross-Coupled via Inductors
Yumiko UCHITANI† and Yoshifumi NISHIO†
† Department of Electrical and Electronic Engineering, Tokushima University 2-1 Minami-Josanjima,
Tokushima, 770–8506, Japan
E-mail: †{uchitani,nishio}@ee.tokushima-u.ac.jp
Abstract In this study, synchronization patterns generated in globally cross-coupled chaotic circuits are investigated. Computer simulations and circuit experiments show that this coupled system produces several phase
patterns.
Key words chaos circuit, complex system, synchronization
1. ま え が き
2. 基本となる回路モデル [3] [4]
結合カオス回路における同期現象は自然科学の高次元非線形
現象のモデルであり,様々な分野で広く研究されている.カオ
スの同期現象を調査することは将来,カオスを利用する工学分
野に活用出来るのではないかと考える [1].また,近年ニューラ
ルネットワークの分野では発振現象を情報処理に利用出来ない
かと様々な研究が行われている [2].我々は発振型ニューラル
ネットワークが様々な種類の位相パターンを発生させることに
注目し,その特性を高度な連想記憶や画像処理に利用できない
かと考え,本研究に着手した.以前我々は,簡単な回路構成の
2 個のカオス回路を交差結合,また,多数のカオス回路をリン
グ状に交差結合させ、発生する現象の調査を行い「同相同期」
「逆相同期」
「90 度位相ずれ」の 3 種類の状態推移現象を観測し
た [3]- [5].本研究では,この交差結合カオス回路の同期パター
ンの特性に基づき,3 個,また 4 個のカオス回路を全体的に交
差結合させ,コンピュータシミュレーション及び回路実験によ
り発生する同期現象のパターンについて調査を行った.
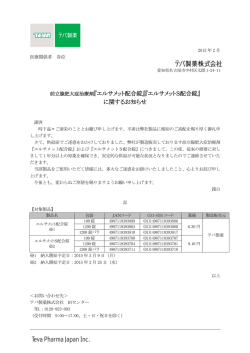
図 1 基本となる回路モデル.
以前、我々は簡単な回路構成の 2 個のカオス回路 [6] [7] を交
差結合させたモデルより観測された現象について調査を行った.
回路モデルは図 1 に示される.この回路は 2 個のカオス回路を
インダクタにより交差結合させている.正規化された回路方程
—1—
式は以下の通りである.
2.5
ẋk = zk
ẏ = α{γy − w − βf (y − z )}
k
k
k
k
k
ż
=
β
f
(y
−
z
)
+
w
−
x
k
k
k
k+1
k
0
-2.5
0
2.5
0
2.5 -2.5
(a1)
(a2)
2.0
(1)
y1
0
-2.0
2.0
y2
ẇk = δ(yk − zk+1 )
0
-2.0
2.0
τ
(a3)
1200
この時,パラメータは以下の通りである.
√
√
L1 ik1
L1 ik2
, wk =
,
xk =
C
V
C
2
2 V
√
vk2
vk1
yk = V , zk = V , t = L1 C2 τ,
√
√
C2
L1
L1
,
β
=
G,
γ
=
g,
α
=
C
C
C
1
2
2
L1
d
δ=
L2
, “·”=
(b1)
(2)
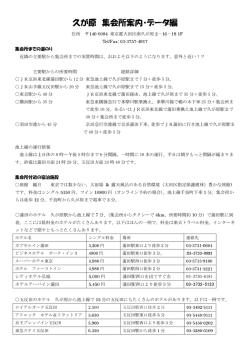
γ = 0.1, δ = 0.0014. (b) 回路実験結果. L1 = 9.93mH, L2
= 800mH, C1 =32.8nF, C2 =49.5nF, g=683mS. (a1) y1 − z1 .
(a2) y1 − y2 . (a3) 時間波形. (b1) v11 − v12 . (b2) v11 − v21 .
(b3) v11 , v21 の時間波形.
f は非線型抵抗の電流電圧特性を表しており次のような区分線
形によって近似する.
f (yk − zk ) =
(b3)
図 2 同相同期での状態推移現象. (a) 数値計算結果. α = 2.5, β = 4.0,
dτ
yk − zk − 1
(b2)
2.5
0
(yk − zk > 1)
(|yk − zk | <
= 1)
yk − zk + 1
(yk − zk < −1)
0
-2.5
(3)
0
2.5 -2.5
0
2.5
2.0
y1
0
-2.0
2.0
y2
0
-2.0
0
図 2 は図 1 の回路から観測された現象の一例である.図 2(a)
τ
1200
τ
1200
(1a)
は式 2 をルンゲクッタ法を用いての数値計算での結果を表して
おり,図 2(b) は回路実験での結果を表している.この回路に
より観測されたカオスは y1 -y2 平面で第 1 象現と第 3 象現を行
き来している事により同相同期だと言える.このカオスの振舞
いの興味深いところは,y-z 平面の解が (y, z)=(±1.2, 0) 付近
の固定点で収束して見えるということである.しかし,固定点
(1b)
で収束したあと突然他方の固定点へと移動する.このように 1
2.5
つの回路が正の領域から負の領域へと,また負の領域から正の
0
領域へと切り替わる.状態が切り替わった後,また各領域で上
-2.5
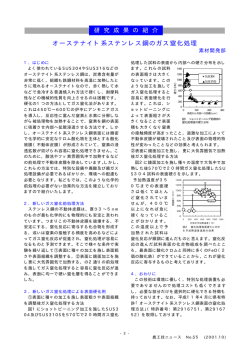
記で示した振舞いをする.初期値を変化させることにより,図
0
2.5 -2.5
0
2.5
2.0
y1
0
-2.0
2.0
3 に示すように逆相同期,4 相同期での状態推移現象を観測す
y2
0
-2.0
0
ることが出来た.図 4 は結合係数 δ を増加させたとき,どのよ
(2a)
うに同期状態が変化するのかを示している.横軸は結合係数 δ
を,縦軸は遅延時間 τ の平均を表している.×は y1 の立上り
時間から次の y1 の立上り時間までの滞在時間の平均を表して
おり,□は逆相同期の時の,また,○は 4 相同期の時の y1 を
基準としたときの y2 の遅延時間の平均を表している.この図
より同相同期,逆相同期,4 相同期は広範囲に渡り共存してい
るということが分かる.
3. 全体的に交差結合したカオス回路
(2b)
図3
状態推移現象. (1) 逆相同期. (2) 4 相同期. (a) 数値計算結果.
α = 2.5, β = 4.0, γ = 0.1, δ = 0.0014. (b) 回路実験結果. L1
= 9.93mH, L2 = 1.2H, C1 =32.8nF, C2 =49.5nF, g=495mS.
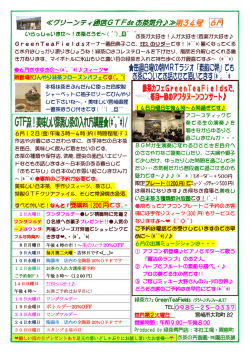
本研究では,図 1 の交差結合カオス回路を基に、多数のカオ
ス回路を全体的に結合した系を考える.すなわち,n 個全ての
カオス回路を,他の回路と直接的に交差結合させるということ
である.図 5 は 3 個のカオス回路を全体的にインダクタで交
差結合させたものである.このままではインダクタでのルー
プが出来てしまうので、それを避けるために微小抵抗 R を取
合では各節点からの結合インダクタの数は 2 個である.つま
り,回路が 3 個の場合,結合インダクタの数は 3 × 2 × 2/2 = 6
個である.回路が n 個の場合の結合部分インダクタの数は
n × 2 × (n − 1)/2 = n(n − 1) と表す事が出来る.
回路が 3 個の時の正規化された回路方程式を以下に示す.
り入れた.各回路は 2 個節点を持っており,回路が 3 個の場
—2—
ẋk = zk
(k = 1, 2, 3)
ẏ1 = α{γy1 − w1 − w2 − βf (y1 − z1 )}
-g
ẏ2 = α{γy2 − w3 − w6 − βf (y2 − z2 )}
L1
C2
C1
i 13
id3
ẏ3 = α{γy3 − w4 − w5 − βf (y3 − z3 )}
v 32
v 31
ż1 = β f (y1 − z1 ) + w4 + w3 − x1
ż2 = β f (y2 − z2 ) + w2 + w5 − x2
ż3 = β f (y3 − z3 ) + w1 + w6 − x3
(4)
ẇ1 = δ(y1 − z3 − ²w1 )
L2
i 24
R
L2
R
R
i 21
L2
i 22 R
R
i 26
L2
v 11
ẇ2 = δ(y1 − z2 − ²w2 )
-g
ẇ3 = δ(y2 − z1 − ²w3 )
C1
i 25
L2
v 12
id1
L2
C2
L 1 -g
v 21
R i 23
i 11
C1
v 22
id2
i 12
C2
L1
ẇ4 = δ(y3 − z1 − ²w4 )
ẇ5 = δ(y3 − z2 − ²w5 )
図 5 カオス回路 3 個での交差結合回路モデル.
ẇ6 = δ(y2 − z3 − ²w6 )
ここで,² は微小抵抗 R を表す.
状態の数値計算結果を図 6 に示す.この時の結合係数 δ の値は,
4. 同期パターン
なぜなら,各節点から他の節点への結合インダクタの数が 2 倍
2 つのカオス回路を交差結合させることにより「同相同期」
になるからである.これより,図 2,図 3 で示した時間 τ の値
カオス回路 2 個結合の場合の結合係数 δ の値の 1/2 倍である.
「逆相同期」「4 相同期」の 3 種類の同期現象が観測出来たこと
で,状態を観測することが出来る.
から多数のカオス回路を交差結合させることにより様々な種類
図 7 に TYPE II の同期状態の回路実験結果を示す.
の同期パターンを観測することが出来る.
6. 4 個のカオス回路を結合させた場合
5. 3 個のカオス回路を結合させた場合
4 個のカオス回路を交差結合させた場合,起こりうる全ての
3 個のカオス回路を交差結合させた場合,同期状態は y1 を基
準としたときの y2 と y3 の位相差より表現することが出来る.
位相パターンを先ほどと同じ表記法により以下のように表記す
ることが出来る.
例えば,完全同相同期の場合には [0, 0, 0] と,また,y1 に対し
TYPE I :
[0, 0, 0, 0]
て y2 が π/2 ずれ (4 相),y1 に対して y3 が π ずれ (逆相) の場
TYPE II :
[0, 0, 0, π/2]
合であれば [0, π/2, π] と表記出来る.この表記法により,起こ
TYPE III :
[0, 0, 0, π]
りうる全ての位相状態を以下のように表記することが出来る.
TYPE IV :
[0, 0, π/2, π/2]
TYPE I :[0, 0, 0]
TYPE V :
[0, 0, π, π]
TYPE II :[0, 0, π/2], [0, π/2, 0], [0, 0, −π/2],
TYPE VI :
[0, 0, π/2, π]
[0, −π/2, 0], [0, π/2, π/2], [0, −π/2, −π/2]
(5)
(6)
結合構造を左右対称にすることにより位相状態の全ての組合せ
TYPE III :[0, 0, π], [0, π, 0], [0, π, π]
を得ることが出来る.4 個のカオス回路を交差結合させた場合
TYPE IV :[0, π/2, π], [0, π, π/2], [0, π, −π/2],
に観測した全ての同期状態の数値計算結果を図 8 に示す.結合
[0, −π/2, π], [0, π/2, −π/2], [0, −π/2, π/2]
係数 δ の値は 2 個結合の場合の結合係数 δ の値の 1/3 倍にする
ことにより,図 2,図 3 で示した時間 τ で,状態を観測するこ
同じタイプの全ての組合せは,結合構造を左右対称にするこ
とが出来る.
とにより得る事が出来るのでこのように表記することが出来る.
3 個のカオス回路を交差結合させた場合に観測した全ての同期
7. ま と め
本研究では,多数のカオス回路を全体的に交差結合させた時
600
τ
の同期パターン特性について調査した.これより,初期値を変
化させることによりカオス回路を 3,4 個結合させた場合の様々
500
な同期パターンを観測することが出来た.より多数のカオス回
400
路を結合させた時に,どのような現象を観測することが出来る
300
のか,また,この現象の発生メカニズムの調査及び信号処理や
200
画像認識,連想記憶への応用を考察することが今後の我々の課
題である.
100
0
0.0008
δ
0.001
0.0012
0.0014
0.0016
0.0018
0.002
図 4 同期状態の特性. α = 2.5, β = 4.0, γ = 0.1.
—3—
2.5
2.5
2.5
0
0
-2.5
0
0
2.5 -2.5
2.5 -2.5
0
(a)
0
-2.5
0
(c)
(b)
2.0
y1
-2.5
2.5
0
2.0
2.5 -2.5
0
2.5 -2.5
(a)
0
2.5
y2
y3
0
y4
-2.0
2.0
2.5 -2.5
(c)
0
2.5
(d)
0
0
-2.0
2.0
0
-2.0
0
2.5 -2.5
-2.0
2.0
y3
0
-2.0
2.0
y1
0
(b)
0
-2.0
2.0
y2
0
-2.0
2.0
(c)
(b)
2.5 -2.5
2.0
y1
0
-2.0
2.0
-2.5
0
(a)
(d)
y4
0
τ
(e)
0
-2.0
1200
0
(e)
τ
1200
τ
1200
τ
1200
2.5
y2
2.5
0
-2.0
2.0
y3
0
0
0
-2.5
0
2.5 -2.5
(a)
-2.0
0
τ
(d)
1200
0
2.5 -2.5
0
2.5 -2.5
(c)
(b)
0
2.5
-2.5
(d)
y1
0
y2
y2
0
y3
0
y4
-2.5
0
(a)
2.5 -2.5
0
2.5 -2.5
0
y4
0
-2.0
0
τ
(e)
2.5
0
0
-2.0
1200
0
(e)
0
0
-2.5
-2.5
-2.0
2.0
0
2.5 -2.5
(a)
2.0
y1
0
2.5 -2.5
0
2.5 -2.5
(c)
(b)
0
2.5
y2
0
τ
(d)
1200
y4
2.5 -2.5
0
(c)
2.5 -2.5
0
2.5
(d)
0
-2.0
2.0
y3
0
0
-2.0
2.0
y4
0
-2.0
0
(b)
0
-2.0
2.0
y2
0
-2.0
2.0
-2.0
0
2.5 -2.5
2.0
y1
-2.0
2.0
y3
0
(a)
(d)
0
-2.0
2.0
0
-2.0
2.0
y3
0
(d)
2.5
0
y2
2.5 -2.5
0
(c)
(b)
0
(c)
2.5
2.5
2.0
y1
2.5 -2.5
-2.0
2.0
-2.0
2.0
0
0
(b)
-2.0
2.0
-2.0
2.0
y3
2.5 -2.5
0
-2.0
2.0
-2.0
2.0
2.5
0
(a)
2.0
2.0
y1
0
τ
(e)
1200
0
-2.0
0
(e)
2.5
図 8 6 種類の同期状態 (数値計算結果). α = 2.5, β = 4.0, γ = 0.1,
0
-2.5
2.5 -2.5
0
2.5 -2.5
0
(a)
2.0
y1
δ = 0.00046, ² = 0.0005. 左上から, TYPE I, II, III, IV, V,
0
and VI. (a) y1 − y2 平面でのアトラクタ. (b) y2 − y3 平面で
2.5
(c)
(b)
のアトラクタ. (c) y3 − y4 平面でのアトラクタ. (d) y4 − y1 平
0
面でのアトラクタ. (e) 時間波形.
-2.0
2.0
y2
0
-2.0
2.0
y3
0
-2.0
0
τ
(d)
1200
謝
辞
2.5
本研究は矢崎科学技術振興記念財団の援助を受けて実施され
0
たものである.
-2.5
0
0
2.5 -2.5
(a)
2.5 -2.5
(b)
0
2.5
文
(c)
献
2.0
y1
[1] I. Belykh, M. Hasler, M. Lauret and H. Nijmeijer, “Syn-
0
-2.0
2.0
y2
chronization and Graph Topology,” Int. J. Bifurcation and
0
-2.0
2.0
y3
Chaos, vol. 15, no. 11, pp. 3423-3433, 2005.
0
-2.0
0
τ
(d)
1200
[2] S. Campbell and D. Wang, “Synchronization and Desynchronization in a Network of Locally Coupled Wilson-
図 6 4 種類の同期状態 (数値計算結果). α = 2.5, β = 4.0, γ = 0.1,
δ = 0.0007, ² = 0.0005.
上 か ら, TYPE I, II, III, IV.
(a) y1 − y2 平面でのアトラクタ. (b) y2 − y3 平面でのア
トラクタ. (c) y3 − y1 平面でのアトラクタ. (d) 時間波形.
Cowan Oscillators,” IEEE Trans. Neural Networks, vol. 7,
no. 3, pp. 541-553, Mar. 1996.
[3] Y. Uchitani, R. Imabayashi and Y. Nishio, “State Transition
Phenomenon in Cross-Coupled Chaotic Circuits,” Proc. of
NOLTA’07, pp. 397-400, Sep. 2007.
[4] Y. Uchitani and Y. Nishio, “Investigation of State Transition Phenomena in Cross-Coupled Chaotic Circuits,” Proc.
of ISCAS’08, pp. 2394-2397, May. 2008.
[5] Y. Uchitani and Y. Nishio, “Synchronization Patterns Gen-
(a)
(b)
(c)
erated in a Ring of Cross-Coupled Chaotic Circuits ,” Proc.
of IJCNN’08, pp. 3854-3859, Jun. 2008.
[6] M. Shinriki, M. Yamamoto and S. Mori, “Multimode Oscillations in a Modified van der Pol Oscillator Containing a
Positive Nonlinear Conductance,” Proc. of IEEE, vol. 69,
pp. 394-395, 1981.
[7] N. Inaba, T. Saito and S. Mori, “Chaotic Phenomena in
(d)
図 7 回 路 実験結 果.
L1 = 10.25mH, L2 = 1.5H, C1 =32.2nF,
C2 =49.5nF, g=512mS. (a) v11 − v12 平面でのアトラクタ.
a Circuit with a Negative Resistance and an Ideal Switch
of Diodes,” Trans. of IEICE, vol. E70, no. 8, pp. 744-754,
1987.
(b) v12 − v13 平面でのアトラクタ. (c) v13 − v11 平面でのアト
ラクタ. (d) v11 , v21 の時間波形.
—4—
© Copyright 2026 Paperzz