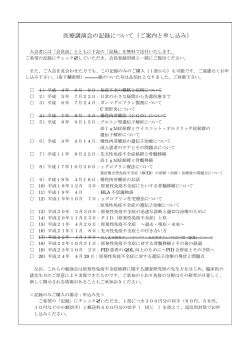
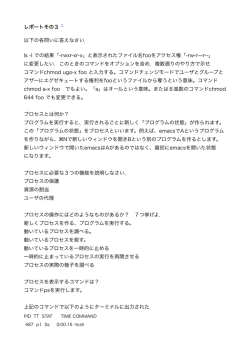
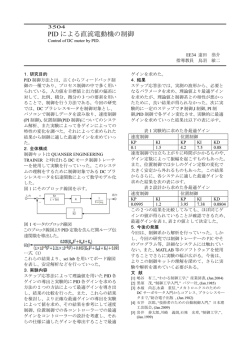
温度制御の概要 機種選定で考慮すべきこと 電気ヒーターの制御性 オン / オフ制御 ポイントの温度を比較して実温度をセットポイン す。入力レンジのパーセントで表わされる不感 コントローラーの基本機能は、実温度とセット トに維持する出力を出すことです。 コントローラーは制御システムの一部で、適切 な選定をするにはシステム全体の解析が必要 です。コントローラーの選定時には次の項目を 考慮する必要があります。 1.入力センサのタイプ ( 熱電対、RTD、カー ド、および温度範囲 ) 2.センサの位置 3.必要な制御アルゴリズム ( オン / オフ、比例、 PID、自動チューン PID) トからの測定値の差による比で、オンまたはオ 帯があり、セットポイントは通常不感帯の中心 では出力のオンとオフの比は 1:1 で、オンの にあります。もし入力が 0 ~ 1000 ℉で、 不 感帯が 1%、セットポイントが 500 ℉であれ ば、 出力は 495 ℉以下では全開で、 温度が 505 ℉に達するまで全開のままです。505 ℉ に達した時、出力は全閉で温度が 495 ℉に下 がるまで全閉です。 プロセスの反応が早ければ 495 ℉と 505 ℉ 5.その他の出力やシステムの要件 ( 温度やセッ ます。 コンピュータ通信など ) 入力のタイプ 入力に使用するセンサは、温度範囲・分解能・ 精度の要求仕様と取付け位置や方式により決 定します。 センサの位置 センサを測定対象物と熱源に対して正しく配置 使われているコンタクタのサイクルも速くなり 場合、エネルギーを頻繁にオン / オフできな いシステム、またはシステムの質量が大きい れます。また、温度警報出力用に使われます。 アラーム発生時に使う特殊なオン / オフコント フの時間が長くなります。 設定温度の上 オン 時間 オフ 時間 セットポイント上 設定温度の下 ロールはリミットコントローラーです。これは ラッチングリレーを使い、定められた温度に達 するとプロセスをシャットダウンするものです。 ことができれば、高精度が容易に得られます。 イクル現象を無くすために使用します。温度が 合の制御精度は、センサの配置場所に大きく はヒーターに供給している平均電力を減らして 依存します。 温度がセットポイント以下であれば、出力のオ ン時間は長く、温度が高すぎる場合は出力オ ために温度変化が極めて緩慢な場合に使用さ 比例制御 しかし、熱源が測定対象物から離れている場 時間の比はその温度差に比例して変化します。 オン / オフ制御は、精密な制御が必要でない することは、制御の最適化のためには非常に 重要です。もし3者すべてを互いの近くに置く 時間とオフの時間は同じになります。温度がセッ トポイントから離れると、オンの時間とオフの の反応度が速ければ速いほどオーバーシュート とアンダーシュート、そして制御エレメントに トポイント、冷却出力、アラーム、リミット、 フになります。セットポイント( 比例帯の中間点 ) の間のサイクリングは速くなります。プロセス 4.必要な出力ハードウエアのタイプ ( 機械式 リレー、SSR、アナログ出力信号 ) しかし、比例帯の内側では出力はセットポイン オン / オフ制御は最も単純な制御のモードで 図1: 比例制御 比例帯は通常フルスケールのパーセントまたは 度で表わされます。または、比例帯の逆数で 比例制御は、オン / オフでは避けられないサ ゲインとも呼ばれます。各プロセスに対して最 セットポイントに近づくと、比例コントローラー クルタイムと比例帯の幅は調整可能です。 いきます。これはヒーターを減速する効果があ 調整があり安定状態温度とセットポイントのオ 適化できるように、通常コントローラーのサイ 比例コントローラーには手動リセット ( トリム ) センサの取付け位置を決める前に、要求熱量 り、セットポイントをオーバーシュートせずに、 フセットを調整することができます。 す。要求熱量が比較的安定しているならば熱 す。この比例動作は、短い間隔で出力のオン えて、 比例コントローラーでは、4-20mA や 比例」は、温度を制御するのに、オンの時間 の出力を使うとリレーと異なり、オン / オフの が一定しているのか変化するのかを見極めま セットポイントに近づき安定した温度を保ちま 源に近くにセンサを置いても対象物の温度変 とオフをすることで行われます。この「時間 要求熱量が変化するときにはセンサを測定対 とオフの時間の比を変えます。 化は小さくなります。 象物の近くに置くと、要求熱量の変化をすぐに 機械式リレーやソリッドステートリレー出力に加 0-5Vdc の 比 例アナログ 出 力もあります。こ 時間ではなく、出力レベルを変化させることが このオン / オフの周期はサイクルタイム、また できます。 センサの間の熱伝導の遅延により、オーバー この比例動作はセットポイント前後に設定され 比例制御+積分制御+微分制御 (PID): 御の結果が悪くなります。これは PIDコントロー 例帯の外ではコントローラーの機能はオン / オ ト ) でトリム調整が自動的に行われる機能以外 例帯の上側 ) です。 したがって、負荷の変化は自動的に補償され 感知することができます。しかし、ヒーターと シュートやアンダーシュートが起こり、温度制 ラーにより改善できます。 制御アルゴリズム ( モード ) これはコントローラーがシステムの温度をある はデューティーサイクルとして知られています。 た「比例帯」の範囲内で起こります。この比 フで、出力は全開 ( 比例帯の下側 ) か全閉 ( 比 べき水準に復元しようとする方法の事です。一 PID コントローラーは、積分機能 ( 自動リセッ は比例制御コントローラーと同じ動作をします。 るので、通常の運転条件では温度とセットポイ ントは一致し、オフセットがなくなります。 般的な方法はオン / オフ制御と比例制御です。 温度-133 温度コントローラー 機種選定で考慮すべきこと この調整はトライアンドエラーで行われます。 W=V(A)(1.5) ま た は A=W/(V)(1.5) こ こ で 数を自動的に調整します。 W はヒーター容量 ( ワット ) 自動チューン付のコントローラーはこの PID 変 低いレート設定 コントローラーの出力ハードウエア ハードウエアを使うかは、ヒーターの種類、電 1) 機械式コンタクタ ントローラー外部のハードウエアにより決まり ます。よく使われる出力ハードウエアには下の ようなものがあります。 図2: レート機能が速い変化を補償する また微分機能 ( レート動作 ) が、急速に変化す る負荷の補償をします。例えば、製品が断続 的に載せられてくるベルトコンベヤ式の加熱炉 です。製品が乾燥炉に入ると要求熱量が急増 し、止まると熱は過剰になります。 微分動作はこのような状況で、アンダーシュー トとオーバーシュートを減らし、製品のオーバー キュアやアンダーキュアを防止します。 比例制御またはオン / オフ制御では 1) 機械式リレー 2) トライアック (AC ソリッドステートリレー ) 3) DC ソリッドステートリレードライバー ( パルス ) ハードウエアは以下の通りです。 2) AC 制御ソリッドステートリレー 3) DC 制御ソリッドステートリレー 4) ゼロクロス SCR パワー制御器 5) 位相角トリガー SCR パワー制御器 機械式コンタクタは、コントローラー内部のリ レーが取り扱えない大電流、または三相用の 電流を取り扱う外部リレーです。15 秒以下の サイクルタイムにはお勧めできません。 アナログ比例制御 ソリッドステートリレーにはコンタクタに無い利 2) 0-5Vdc または 0-10Vdc ルタイムに使えます。サイクルタイムが短いほ 1) 4-20mAdc 時間比例出力は、設定されたサイクルタイム 点があります。可動部品がないため短いサイク ど遅れ時間が少ないので制御性が向上します。 のパーセントで、リレーを操作します。例えば、 スイッチングはゼロクロス式で、電気ノイズ 10 秒のサイクルタイムの場合、コントローラー 出力が 60% に設定されると、リレーは 6 秒 はほとんど発生しません。AC 制御ソリッドス テートリレーは、コントローラーのトライアッ 間閉じてエネルギーを供給し、4 秒間開いて ク出力か機械式リレーで駆動され、480Vac 機械式リレーが最も経済的で、サイクルタイム ドステートリレーは DC ソリッドステートドライ ムに採用されます。 3-32Vdc が 使 え、 最 大 480V、90 ア ン ペ ア エネルギーを止めます。 が 10 秒以上で、負荷が比較的小さいシステ セット ポイント 1.5 は安全率 負荷を取り扱える温度コントローラー外部の 源、制御アルゴリズム、ヒーター負荷を扱うコ 正しいレート設定 V は電圧 温度コントローラーの出力ハードウエアは、い くつかある中の 1 つを選択します。どの制御 セット ポイント A はリレーの定格 (A) で 90 アンペアまで使用可能です。DC ソリッ バ ( パルス ) で駆動されます。オンの信号には ACソリッドステートリレーまたは DC パルスは、 までのリレーがあります。 オフセット 可動部品がないので、信頼性が重要なシステ ゼロクロス SCR パワー制御器は、 単相また 短いサイクルタイムのプロセスに適していま 480V で 最 大 200A ま で 使 え ま す。 通 常 ムに使用されます。 す。大電流を使用する加熱用ヒーターの駆動 には外付リレーが必要です。 図3: リセット機能でオフセットがなくなる PID 制御ではオン / オフ制御や比例制御より、 正確で安定した制御が可能です。プロセスへ の投入エネルギーによる変化に速く反応する、 比較的小さい容量のシステムに使用されます。 負荷が頻繁に変化するプロセスにはこのシス テムが適しています。コントローラーはセット ポイントの頻繁な変化や、使用可能なエネル ギーの量、またはコントロールすべきマスに対 比例、積分、微分のパラメータはそれぞれそ のシステムに合わせて、調整しなければなりま 4-20mA 制御信号が必要です。 ゼロクロス SCR パワー制御器は、サイクルタ 振幅比例出力は通常アナログ電圧 (0-5Vdc) イム 2 秒以下のアナログ出力信号を時間比例 の出力レベルはコントローラーで設定すること ロクロススイッチングを行います。 出 力 が 60% に 設 定 さ れ る と、 出 力 レ DC 制御出力で動作します。負荷への電力は、 または電流 (4-20mA) です。この出力タイプ ができます。 ベ ル は 5V の 60% す な わ ち 3V で す。 4-20mA(16mA ス パ ン ) 出 力 の 場 合、60% は (0.6x16)+4 す な わ ち 13.6mA で す。 こ 信号に変換し、また電気ノイズを避けるためゼ 位 相 SCR パ ワ ー 制 御 器 も ま た 4-20mA の AC の半サイクル毎に導通角を調整して、電 力を連続的に制御しています。この方法は電 圧を 1 周期 0.0167 秒で変化させることがで のタイプのコントローラは比例バルブや電源コ きます。ちなみに、比例制御コントローラーは 電熱ヒーターの消費電力はワットで表示されま 以上も珍しくない ) をかけて変化させています。 レーの定格容量の計算式は次の通りです。 応答が必要な用途に使用する場合は、位相角 ントローラに使われます。 す。リレーの容量はアンペアです。安全なリ せん。 温度-134 平均電力を通常 1 秒以上の長い時間 (15 秒 赤外線ランプや熱線ヒーターなどを、高速な SCR 制御が適しています。 温 度 して、自動的に補償するようになっています。 は三相のさらに大きな負荷に対応可能です。 温度制御 PID(3 モード式 ) コントローラーのチューニング PID 温度コントローラーのチューニングとは、プロセスの制御を最善の コントローラーの設置・配線作業の完了後、 にオートチューンのアルゴリズムが付属していない時や、オートチューン 2. 可能であれば、コントローラーの出力を停止します。 1. コントローラーの電源を入れます。 状態にする、比例・積分・微分の値を設定することです。コントローラー 3. 時間比例プライマリ出力に、以下の数値を入力してサイクルタイムを があっても制御がうまく行かなければ、トライアンドエラー方式でチュー 設定します。 ニングする必要があります。 サイクルタイム1 OMEGA ™ CN2000 コントローラーのチューニング手順は以下の通り 5 秒 ( 出力が時間比例出力の時だけ表示されます。応答速度が極端に です。この手順は他のコントローラーにも適用することができます。他 速い時には、さらに小さなサイクルタイムにする必要になる場合があり にもチューニング方法はありますが、いずれも同様のトライアンドエラー 方式を使っています。もしコントローラーがソリッドステートリレーでなく ます ) 秒以上の長めに設定してください。 PR BAND 1________ 5% (PB) 以下の変数 ( パラメータ ) を選択します。 機械式リレーを使っている場合には、スタート時のサイクルタイムを 20 RESET 1_ ________ 0 R/M ( リセット機能を停止 ) 以下の定義を再確認しておきます。 RESET 2_ ________ 0 R/M 1) サイクルタイム : デューティサイクルとも呼ばれる。コントローラーが RATE 1_ ________ 0 MIN ( レート機能を停止 ) 一回のオンオフサイクルを完了する時間。例 : 20 秒のサイクルタイ ムでオンの時間が 10 秒、オフの時間が 10 秒であれば、50% の出 力となる。コントローラーは比例帯の範囲内でオンとオフを繰り返す。 2) 比例帯 (PB): フルスケールの % または度で表わされる帯域で、そ RATE 2_ ________ 0 MIN 注意 の幅の内ではコントローラーは比例動作をする。比例帯が広いほど、 デュアル 3 モード出力の機器ではプライマリとセカンダリのチューニング セットポイントの近くの比例動作をする幅が広くなる。比例帯の逆数 であるゲインとも呼ばれる。 3) 積分 : リセット (RESET) とも呼ばれる関数で、オフセット ( ドループ ) をセットポイントに対して補償するため、比例帯を調整する。システ ムの安定後に制御温度がセットポイントになるよう調整する。 4) 微分 : レート (RATE) とも呼ばれ、システムの温度の上昇や下降の 速度を感知し、オーバーシュートやアンダーシュートを最小にするよ うに比例帯を自動的に調整する。 PID(3 モード式 ) コントローラーは、正しく調整されていれば、極めて安 定した制御を行うことができます。以下の説明を正確に実行すれば、応 答速度を最速にしてオーバーシュートを最小にできます。PID コントロー ラーのチューニングの手順は他のコントローラーのものとは違う部分があ ります。 通常オートチューンの機能があれば、プライマリ出力の手動チューニン 変数はそれぞれ個別に設定・チューニングします。このセクションで説 明する手順は加熱用のプライマリ出力用です。プライマリ冷却出力また はセカンダリ冷却出力にも同じ手順を適用できます。 A. 加熱制御出力のチューニング 1. OUTPUT を可動 (Enable) にしプロセスの運転を開始します。 2. プロセスは、 熱の供給を受けてセットポイント温度の近辺で安定します。 3. レートとリセット機能をオフしている時には、温度はセットポイントに対 してオフセットを持った状態で安定化します。指示計の表示値を観察 して、温度が正常な温度変動サイクルであるか発振 ( オシレーション ) かをよく見極めます ( 発振は最大 30 分にもなることがあります )。 プロセス温度を連続して記録するレコーダを使用すると温度の変遷が 判定し易くなるので、チューニングが楽になります。 グは必要ありませんが、必要ならばオートチューンの数値を調整しても 構いません。 TEMP. 温度 時間 この状況が現れたら PBを半分にする. 時間 ほぼ完全な チューニング 図 1: 温度の発振 温度-135 TEMP. プライマリ セットポイント プライマリ セットポイント プライマリ セットポイント 時間 この状況が現れた らPBを2倍にする PID コントローラーのチューニング ( 続き ) 4. 温度に安定した発振 ( オシレーション ) がなければ、PB( 比例帯 ) の 9. これでコントローラーに最適な性能を発揮させるために必要な測定 温度の発振があるかどうかを調べます。この状態でも発振が見られな 10. ステップ 7 で測定した発振時間を使って、リセットの値 ( 繰り返し回 まで繰り返します。ステップ 5 に進みます。もし発振が出てきたら、 ます。発振が続くなら発振が止まるまで PB の値を 2 倍ずつ増やし 数値を半分にします ( 図 2 参照 )。プロセスが安定するのを待って、 ければ PB の値をもう一度半分にします。この手順を発振が見られる すぐに PB の値を 2 倍にします。その後の温度変化を数分間観察し ていきます。 は全て完了しました。あとはレートとリセットの調整だけです。 5. 以上の作業で PB 値は最適値に非常に近くなっています。 PB 値が最小値の 1% でも、温度の発振が起こる場合は、ステップ 8 x 1 ____ 5TO ここで TO = は発振回数 / 分 またはノモグラム II を使います ( 図 5 参照 ) 0.1 0.2 5 2 1 0.3 10 20 3 2 7. 隣り合ったピークまたは谷同士の間 (1 周期 ) の発振周期を分単位で 測定します。チャートレコーダを使用すると簡単にできますが、その タイミングを見るには 1 分間に 1 回の測定になります。 温度 プライマリセットポイント この温度を測定 PBを増加 PBを減少 0.10 0.03 0.02 0.05 11. ステップ 7 で得られた発振時間を再度使い、以下の式でレートの数 値 ( 分 ) を計算します。 RESET = TO __ 10 ここで TO = は発振時間 またはノモグラムIIIを使います(図6参照) この数値を RESET 1に入れます。 温度サイクル時間(分) 0.1 図 2: 発振時間 0.01 0.2 れた最初の温度に 1.65 を掛けて計算する ( 図 3 参照 ) か、または 標とする最終温度偏差になるまで、トライアンドエラー方式で PB の 温度 PBによる 1.65温度偏差 PBによる 温度偏差 開始 3 10 20 0.2 0.3 1 2 30 40 50 3 4 5 図 6: ノモグラム III 12. オーバーシュートが発生したら、RESET 時間を短くすれば解消でき ます。RESET の値に変更を加えた時には、対応するレートの値も 便利なノモグラム ( 計算図表 ) を使って見出します ( 図 4 参照 )。目 プライマリセットポイント 2 0.1 正しいレート設定(分) 必要な最終温度偏差は、CRITICAL PB( 限界 PB) の設定値で得ら 設定を繰り返します。 1 0.3 0.02 0.03 8. ここでオフセットが 65% 増えるまで PB の設定を大きくします。 限界PB PBによる時間 0.30 0.20 100 30 この数値を RESET 1に入れます。 時間 開始 20 図 5: ノモグラム II この時間を測定 限界PB 10 0.50 1 6 ~ 11 を飛ばして、手順の B に進んで下さい。 平均温度を使います ) 3 正しいリセットの設定(分) 6. 限界 PB 値を使って得られた定常状態の温度とセットポイントの偏差 ( オフセット ) を読みます 。( 温度は小さな周期的変動をしているので 温度サイクル時間(回/分) 温度記録を見ながら、発振がちょうど現れ始めるまで PB 値を増加ま たは減少していきます。 数 / 分 ) を下の式を使って計算します。 RESET = 下の式を使って変更します。 RATE = 1 ______________ 6 x Reset Value 例: リセット=2 R/M の時 レート=0.08分 となります。 13. システム外乱に対する「応答速度」と「整定時間」の適正なバラ ンスを取るには、セットポイントの変更とそれに伴うリセットとレート 時間の調整が数回は必要です。一般的には、応答速度を早くすると、 時間 オーバーシュートが大きくなりますが、プロセスが落ち着くまでの時 図 3: 最終温度偏差の計算 間 ( 整定時間 ) は短くなります。逆に応答が遅いと、オーバーシュー トはほとんどない状態で最終値に到達します。システムの必要性に 応じて、最適な応答速度を選択します。 14. チューニングが適切に終了したら、コンタクタの寿命を延ばすため 限界PBC設定による温度偏差 例:偏差3σのPB 最終偏差が5σになる PBに設定 2 1 2 3 3 5 4 5 10 10 15 20 15 20 30 40 50 30 40 50 70 100 100 150 最終温度偏差=1.65x限界PBC設定の時の偏差 のサイクリングに伴う測定値に発振を起こさない範囲で、サイクル タイムをなるべく大きく設定します。 15. 手順の C に進みます。 温度-136 温 度 図 4: ノモグラム1 に、サイクルタイムを長くします ( 時間比例出力にのみ適用 )。負荷 B. 発振が見られない時のチューニング手順 1. PB を最小に設定した時の、セットポイントと定常状態の温度の差 ( オ 3. 最大スロープの点から周囲温度軸へ向かって直線を引き、システム の遅延時間 Td を求めます ( 図 8 参照 )。この遅延時間は下の計算 フセット ) を測定します。 式でも求められます。 2. 温度偏差 ( オフセット ) が 65% 増加するまで PB の設定値を大きくし ます。ノモグラム I( 図 4) を使うと必要な最終温度偏差が簡単に計算 できます。 3. リセットを大きな数値 (10 R/M) に設定します。RATE 1を対応する Td= 最大スロープまでの時間ー ( 最大スロープでの PV 値ー周囲温 度 )/ 最大スロープ 4. PID パラメータを求めるには次の計算式を使います。 PB=Td x最大スロープ x 100/ スパン = スパンの % 数値 (0.02 分 ) に設定します。この時点で微分動作によって温度は 設定温度で安定するはずです。 Reset=0.4/Td=Resets/ 分 Rate=0.4 x Td= 分 4. 限界発振時間を決めることはできないので、積分と微分調整の最適 5. システムを再び運転し、コントローラの制御ループをオンにし、プロ ポイントで安定したら、セットポイント温度を 10℃上げます。この変更 すぎる場合や発振している場合は、PID の変数を次に述べる方向に 設定値はトライアンドエラーで決めなければなりません。温度がセット セスの設定温度に対する反応を観察します。オーバーシュートが大き に伴う実測温度のオーバーシュートを観察します。そして温度を元の 変えて行きます ( プロセスの反応を観察しながら、一度に少しずつ変 セットポイントに戻し、実測温度のオーバーシュートを再度観察します。 過剰なオーバーシュートは、リセットとレートのどちらか ( または両方) 更します )。 比例帯を広げ、リセット値を小さくしレート値を大きくします。 の数値が大きすぎることを示しています。応答が遅い ( オーバーシュー 例 : フルパワーでオーブンを運転した時、図 8 のグラフが得られたとし さらに改善が必要な場合は、一度に一つの変数を変え、セットポイン の範囲は 100 ~ 600 ℉、または 500 ℉のスパンです。 特性が最適になるまで変数を少しずつ変更します。 トのない ) 場合は、数値が小さいことを示しています ( 図 7 参照 )。 ます。グラフの目盛りは 10 ℉ /cm と 5 分 /cm です。コントローラー トを変更した時の特性への影響を観察します。 5. チューニングが適切に終了したら、コンタクタの寿命を延ばすために、 サイクルタイムを長くします ( 時間比例出力にのみ適用 )。負荷のサ イクリングに伴う測定値の発振を起こさない範囲でサイクルタイムを なるべく大きく設定します。 最大スパン=18 ℉ /5 分 =3.6 ℉ / 分 遅延時間 Td= 約 7 分 PB=7 分x 3.6 ℉ / 分 x100/500 ℉ =5% Reset=0.47/7 分 =0.06 リセット / 分 Rate=0.4 x 7 分 =2.8 分 PV リセットまたはレートが過大 リセットまたはレートが過小 18oF 図 7: リセットとレートの設定 5分 C. 冷却制御用のプライマリ出力のチューニング Td 加熱制御と同じ手順で行います。プロセスの温度が定常状態になる前 で、冷却制御が必要となるような温度に、セットポイントを設定します。 D. PID コントローラーの簡易チューニング手順 以下の手順はステップ入力に対するプロセスの反応カーブ分析のテク ニックを図解したものです。PV(= プロセス値 ) を記録するストリップ チャートがあればさらに簡単になります。 1. 常温からスタートし、 コントローラーの制御なしに最大電力をプロセス に加えます。 例 : ループを解放した状態、開始時間を記録します。 2. センサに熱が到達するまでの時間の遅れの後、PV は上がり始めま す。その後 PV は最大の変化率 ( スロープ ) に達します。この最大 スロープに達した時間とその時の PV を記録します。スロープの傾き の大きさは度 / 分で記録します。システムの電源を切ります。 温度-137 TO TIME 図 8: システム遅延時間
© Copyright 2026 Paperzz