拮抗配置した空気圧アクチュエータを有する受動歩行ロボットの速度制御
田熊 隆史,細田 耕
大阪大学大学院工学研究科知能・機能創成工学専攻
{takuma, hosoda}@ams.eng.osaka-u.ac.jp
Abstract: 現在多くの受動歩行ロボットは自由関節を持ち,自己のダ イナミクスと環境との相互作用のみを利用
することで歩行を実現している.しかしこれは一方で,環境が変わらない限りロボットの挙動を変えることがで
きないことを意味する.そのため自由関節を持つ受動歩行ロボットでは,同じ 環境内でその歩行速度を変えるこ
とはできない. このようなロボットの歩行速度を変える方法として,関節に弾性を持たせることが提案されてお
り,これまで受動歩行ロボットの腰関節弾性の操作によって歩行速度が変わることがシミュレーション上で確認さ
れている.このような弾性の操作を実際のロボットで実現するには,駆動機構を工夫する必要がある.本稿では
マッキベン型空気圧アクチュエータに用い,これを拮抗に配置して関節を駆動する.マッキベン型アクチュエー
タはアクチュエータ内に給排気する空気の量によってその弾性を操作することができる.またアクチュエータ内
の圧力を一定に保つことで,エネルギーを消費することなく受動的に弾性を維持することができる.このアクチュ
エータを関節に拮抗に配置することにより,受動的な弾性関節を実現することができる.このような機構で歩行
を行った結果,腰関節の弾性を変えることによって歩行速度が変わることが確認された.
Keywords: 受動歩行,空気圧アクチュエータ,速度制御
1. はじめに
受動歩行はアクチュエータを一切用いることなく斜
面を下ることから,エネルギー効率の良い歩行として
近年注目を集めている [1].これまで受動歩行ロボッ
トにアクチュエータを付加することで,歩行の安定化
について改善が見られた [2][3][4] .しかし受動歩行ロ
ボットがエネルギー効率よく自在な歩行を実現するに
は,依然様々な問題がある.
本稿ではこれらの問題のうち,歩行中のロボット
の挙動,特に歩行速度の操作に着目する.受動歩行ロ
ボットは自由関節を持ち,自己のダ イナミクスと環境
とのインタラクションを利用して歩行を実現する.し
かしこれはロボットの挙動がこれらダ イナミクスやイ
ンタラクションのみに支配されており,能動的に歩行
速度を変える余地がないことも意味している.
一方で受動歩行に近いといわれているヒトの歩行
を観察すると,その関節は柔軟な筋肉で駆動されてお
り,これらの剛性を変えることで挙動を変えていると
考えられる.ロボットの分野でも,腰関節の弾性を調
整することで歩行速度が操作可能となることがシミュ
レーション上で示されている [5].このような関節を実
ロボットで実現するには,弾性が操作できるアクチュ
エータが必要となる.
これまで弾性が操作できるアクチュエータはいくつ
か提案されてきたが [6][7] ,エネルギー効率の観点か
ら我々は空気圧アクチュエータを用いる.空気圧アク
チュエータは空気を注入することで伸縮し,バネの特
性を持つ.またその弾性はアクチュエータ内の圧力に
応じて変えることができる.そのため,このアクチュ
エータに適当な時間給気した後弁を閉じると,弁を開
けていた時間に応じてその弾性が変わる.また弁を閉
じている間エネルギーを消費しないので,その間アク
チュエータは受動的な弾性を保つことになる.このア
クチュエータを関節に拮抗に配置すると,筋肉と同様
関節を駆動し ,その弾性を操作することができる.
我々はこのアクチュエータを用いた二足歩行ロボッ
トを試作し,腰関節を自由関節および受動的弾性関節
にして歩行を行う.この結果自由関節による歩行では
歩行速度は操作できないが,受動的弾性関節による歩
行では歩行速度が操作可能であることが分かった.本
稿ではこれについて報告する.
2. 空気圧アクチュエータを用いた歩行ロボットの
試作
2.1 ロボットの構成
本稿の目的は,腰関節の弾性を変えることで受動
歩行ロボットの挙動,特に歩行速度が変わることを観
測することである.そのため関節を駆動するアクチュ
エータに求められる機能は,弾性を維持するエネル
ギー消費が少ないこと,さらには弾性の操作が簡単で
あることである.本稿では拮抗に配置したマッキベン
型空気圧アクチュエータ [8][9] を用いて腰関節の弾性
を操作する.この弾性操作のメカニズムについては後
で述べる.
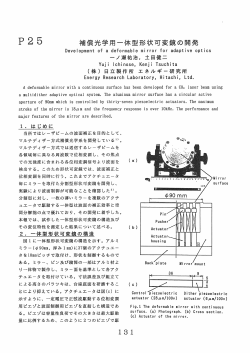
図 1 に試作した二足歩行ロボット「 空脚」を示す.
各関節は日立メディコ社製の空気圧アクチュエータを
用いている.アクチュエータ内部の圧力が 0.7 MPa の
とき,その直径および長さは 0.027 m, 0.15 m となる.
またロボットの全長は 0.75 m, 幅は 0.35 m, 重さは約
5.3kg である.また大腿部リンクの長さおよび重量は
0.3 m, 4.3 kg であり,脛部リンクの長さおよび重量は
0.35 m, 0.9 kg である.
自立歩行が可能となるように,ロボットには空気
の供給源のための小型高圧ガ スボンベを 2 個,電磁
弁を駆動するためのバッテリーを 1 個搭載している.
ボンベの圧力は高圧のため,実験ではボンベからの供
給圧力をレギュレータで調整して 0.55 MPa にして使
用した.また電磁弁を操作するために,マイクロコン
ピュータを搭載している.電磁弁は空気の供給,排気
および給排気どちらも行わない三状態に切り替え可能
である.足裏は受動歩行に適した円弧状になっており,
その半径は 0.125 m, 長さは 0.08 m である.また足裏
にはタッチセンサが装着されており,地面への接地を
検出する( 図 2 参照).接地時の信号はコントローラ
に送られ,その後次節で述べるフィード フォワード 制
御則に則って電磁弁の開閉を行う.
Air bottle
air flow
on/off touch information
H8
three position solenoid valve
with closed center position
Single chip
micro computer
touch sensor
Fig. 1 A 2D biped walker with McKibben pneumatic
actuators. The robot is self-contained and has two
air bottles with regulators, three-position air valves, a
microcomputer board, and an electrical battery.
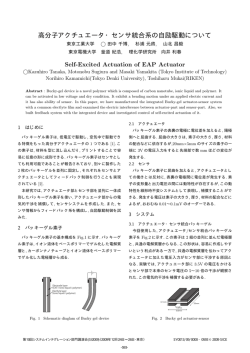
Fig. 2 Architecture of a planar biped walker driven by
antagonistic pairs of McKibben pneumatic actuators.
The main feature of the walker is the three-position
solenoid valve with a closed center position that enables the robot to control joint elasticity.
2.2 関節駆動機構
図 2 にマッキベン型アクチュエータを拮抗に配置し
た二足歩行ロボットの構成を示す.アクチュエータに
空気が供給されると,アクチュエータは収縮し,引張力
を発生する.アクチュエータは非線形バネの特性を有
し,圧力の増加とともにバネ係数は増大する [8].従っ
て各関節の弾性はアクチュエータ内の圧力で決まる.
アクチュエータは電磁弁で駆動されており,弁はマ
イクロコンピュータからの信号によって給気,排気,
給排気両方の弁を閉じる三状態に切り替えることがで
きる.一定時間給気もしくは排気弁を開けた後その弁
を閉じることで,アクチュエータは適当な圧力を保つ
ことができ,その結果関節は適当な弾性を保ったまま
受動的に運動を行うことができる.またこの給排気す
る時間を変えることでアクチュエータ内の圧力は変化
するため,アクチュエータの弾性は給排気時間を調整
することで操作することができる.Wisse らは空気圧
アクチュエータを拮抗に配置したロボットで歩行を実
現した [10] .しかし給気および排気のみ行う電磁弁を
使用したため,弾性を維持したまま受動的に運動する
ことはできない.一方試作したロボットは上述の通り
アクチュエータの弾性を操作することができ,その結
果関節の弾性も操作することができる.
3. フィード フォワード 制御則による歩行
腰関節の受動的弾性が歩行速度に寄与することを確
認するため,本稿は二つのフィード フォワード 制御則
を提案する.ひとつは腰を自由関節にした歩行のため
の制御則であり,もう一つは腰を受動的弾性関節にし
た歩行のための制御則である.本稿では各関節のアク
チュエータに給排気する時間を調整してフィード フォ
ワード 制御則を構築する.弁開閉の手順について以下
に示す.
3.1 自由腰関節による歩行
自由腰関節による受動歩行を行う給排気弁操作手
順を以下に示す( 図 3 参照).以下腰関節を駆動する
ために拮抗に配置したアクチュエータのうち,前方に
配置したアクチュエータを「主動アクチュエータ」と
呼び,後方には位置したアクチュエータを「拮抗アク
チュエータ」と呼ぶ.
(i) 脚着地後,主動アクチュエータに給気する弁を
一定時間開ける.同時に拮抗アクチュエータから
排気する弁を開ける.これにより遊脚は前方に振
り出される.
(ii) 主動アクチュエータに一定時間給気した後給気
弁を閉じ,同時に排気弁を開ける.また拮抗アク
チュエータは排気を続ける.これにより腰関節は
自由回転する.その後脚着地まで両アクチュエー
タとも排気を続け,着地後遊脚・支持脚を入れ替
える.
ここで,主動アクチュエータに給気する時間を Ts
とする.試行実験として歩行可能な Ts の値を探索し
たところ,Ts がある範囲内であれば 歩行可能である
ことが分かった.
3.2 受動的弾性腰関節による歩行
受動的弾性腰関節による受動歩行を行う給排気弁操
:
作手順を以下に示す( 図 4 参照)
(i) 脚着地後,遊脚を前方に振り出すために主動ア
クチュエータに給気する弁を一定時間開ける.同
時に拮抗アクチュエータから排気する弁を一定時
間開ける.
(ii) 一定時間弁を開けた後,その弁を閉じる.これ
によりアクチュエータ内はある程度の圧力とな
り,それに応じた弾性を維持しながら腰関節は回
転する.
(ii)
(i)
(ii)
(i)
ago.
ant.
Touch
Touch
agonistic
hip actuator
agonistic
hip actuator
antagonistic
hip actuator
antagonistic
hip actuator
Tk
agonistic
knee actuator
Ts
Touch
Touch
time
Tk
Te Ts
time
agonistic
knee actuator
antagonistic
knee actuator
antagonistic
knee actuator
T(k)
T(k)
expel
supply
close
Fig. 3 Schematic diagram of when to actuate and relax the muscles for walking with a free hip joint. The
rectangles in the picture indicate the agonistic and antagonistic hip actuators. Note that the supply duration
for the agonistic knee actuator Tk is tuned so as to
avoid foot collision with the ground.
ここで主動アクチュエータに給気する時間を Ts とし ,
拮抗アクチュエータから排気する時間を Te とする.先
述の通り腰関節の弾性は給気と排気の時間 Ts , Te に
よって決まる.これら二つを歩行パラメタとして試行
実験をしてみたところ,先と同じく Ts , Te がある範囲
内であれば歩行が可能であることが分かった.これよ
り Ts , Te を変えることによって様々な弾性をもって歩
行できることが分かった.
腰関節と同様,膝関節も拮抗に配置した二つのア
クチュエータによって駆動する.このうち膝主動アク
チュエータ( 膝の伸展に寄与するアクチュエータ)は
歩行前に一定期間空気を入れて弾性をもたせ,膝拮抗
アクチュエータ( 屈曲に寄与するアクチュエータ)に
給気しない間は常に膝が伸展するようにする.ここで
遊脚が地面と衝突することを避けるために,脚着地後
遊脚膝拮抗アクチュエータに一定時間 Tk( 図 3,4 参
照)給気し膝を屈曲させる.その後排気し,膝を伸展
させる.これらの時間について試行錯誤的に探索した
結果,膝主動アクチュエータに歩行前給気する時間は
0.08 s, 膝拮抗アクチュエータに脚振出中給気する時間
は 0.3 s が適当であることが分かった.脛リンクの重量
は全重量に比べて小さく,また膝の関節駆動範囲は微
小なため,この運動は歩行の挙動に影響を与えない.
close
expel
Fig. 4 Valve opening procedure for walking with the
compliant hip joint
期的な歩行時の速度を測るために 10 歩目以降の歩行
速度を測定した.
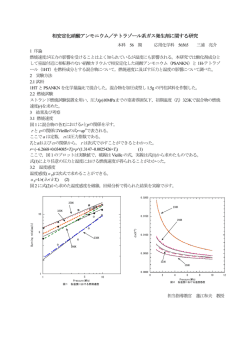
4.1 結果 1: 自由腰関節による歩行
図 5 に,腰関節が自由関節のときの給気時間 Ts と
歩行速度の関係を示す.ロボットは 0.12 ≤ Ts ≤ 0.16 s
の範囲で歩行が可能であった.実験を行った結果,図の
ようにすべてのパラメタで歩行速度はほぼ同じになっ
た.この結果より,腰関節が自由関節のとき,パラメ
タを変えても歩行速度は操作できないことが分かった.
0.6
average forward velocity [m/s]
supply
0.55
0.5
0.45
0.4
0.05
0.1
0.15
0.2
0.25
supply duration Ts [s]
0.3
0.35
4. 弾性腰関節による歩行速度操作
Fig. 5 Relationship between supply duration for the
agonistic hip actuator Ts and the average forward velocity when Ts = 0.12, 0.14 and 0.16 [s] for the case
of walking with a free hip joint
先の弁操作手順に従って腰関節を自由関節もしくは
受動的弾性関節にして歩行を行い,歩行パラメタ Ts ,
Te( 受動関節の場合は Ts のみ )が歩行速度に与える
影響を観察する.歩行速度は一方の脚が着地してから
もう一方の脚が着地するまでの間の平均速度とし,周
4.2 結果 2: 受動的弾性腰関節による歩行
図 6 に腰関節が受動的弾性関節のときの給気時間
Ts ,排気時間 Te と歩行速度の関係を示す.図のよう
にロボットは 0.08 ≤ Ts ≤ 0.4 s, 0.22 ≤ Te ≤ 0.4 s の
0.6
0.5
0.4
0.1
0.2
Ts [s] 0.3
0.4
0.7
forward velocity[m/s]
0.7
0.75
Te=0.22[s]
0.65
0.6 Te=0.26[s]
0.55 Te=0.3[s]
0.5
Te=0.4[s]
0.1
0.2
0.3
0.4
supply duration Ts [s]
(a) Ts and the velocity extracted from Figure 6. The
expel duration is fixed as Te = 0.24, 0.32, and 0.4 s.
0.42
0.3 0.34 0.38
0.22 0.26
Te [s]
Fig. 6 Relationship between supply duration for agonistic hip actuator Ts , expel duration for antagonistic
actuator Te , and average forward velocity.
図 7 (a)(b) に図 6 の一部を示す.(a) は排気時間 Te =
0.22, 0.26, 0.3, 0.4 s のときの給気時間 Ts と歩行速度
の関係を示す.図のように Te が一定のときは Ts を変
えても歩行速度が変わらないことが分かる.図 7(b) に
Ts = 0.16, 0.2, 0.24 s のときの Te と歩行速度の関係を
示す.図のように歩行速度は Te の増加に応じて増大
している.これより歩行速度は排気時間 Te に大きく
影響を受け,Ts に影響を受けないことが分かった.
4.3 腰関節の弾性と歩行速度の関係
腰関節の弾性と歩行速度の関係について考察する.
ただし歩行中の腰関節の弾性を測定することは難しい
ため,ここでは脚着地時の腰主動・拮抗アクチュエー
タの圧力を観察し,これらと歩行速度の関係について
考察する.
図 8 に Ts = 0.2, Te = 0.28 s 時の歩行中の主動およ
び拮抗アクチュエータの圧力軌道を示す.図のように
給気,排気弁が開いている間はそれぞれ圧力が増加,
減少し,これらを閉じた後は圧力がほぼ一定に保たれ
ている.また弁を閉じている間は腰関節は空気を消費
せず,受動的弾性をもって運動している.このときの
圧力は脚着地時の圧力とほぼ一致し,圧力に応じて腰
関節の弾性が決まることから,脚着地時の圧力と腰関
節の弾性は密接な関係がある.そこで脚着地時の主動
および拮抗アクチュエータの圧力と歩行速度の関係か
ら関節の弾性と歩行速度の関係を推察する.
図 9 (a) に Ts , Te と脚着地時の主動アクチュエータ
の圧力との関係を示す.また (b) に Ts , Te と脚着地時
の拮抗アクチュエータの圧力との関係を示す.図より
Ts , Te に応じて圧力が異なることが分かる.
図 6 と図 9 より,腰関節を駆動する主動アクチュ
エータの圧力,拮抗アクチュエータの圧力と歩行速度
の関係を図 10 に示す.また図 11(a)(b) にそれぞれ主動
アクチュエータの圧力と歩行速度,拮抗アクチュエー
タの圧力と歩行速度の関係を示す.図 (a)(b) 中それぞ
れ四カ所表記されている値は,順に給気時間と排気時
間を表す.図 (a)(b) より,給気時間を固定すると圧力
の増大に応じて歩行速度が大きくなっていることが分
かる.[8] より,アクチュエータ内の圧力が増加する
とアクチュエータの持つ非線形バネ特性のバネ係数が
0.7
forward velocity [m/s]
forward velocity [m/s]
範囲で歩行が可能であった.これより歩行パラメタに
よって歩行速度が変わることが分かる.この結果より,
歩行速度はパラメタによって操作可能であることが示
された.
Ts=0.16[s]
Ts=0.2[s]
Ts=0.24[s]
0.65
0.6
0.55
0.5
0.45
0.2
0.25
0.3
0.35
expel duration Te [s]
0.4
(b) Te and the velocity extracted from Figure 6. The
supply duration is fixed as Ts = 0.16, 0.2, and 0.24 s.
Fig. 7 Relationship between Ts , Te , and the walking
velocity extracted from Figure 6
増加することが知られており,またアクチュエータの
弾性によって関節の弾性が変わることから,腰関節の
弾性を調整することで歩行速度が操作されることが分
かった.
5. 結論
本稿では弾性可変な空気圧アクチュエータを拮抗
に配置した二足歩行ロボットを試作し,提案する二種
類のフィード フォワード 制御則によって歩行を実現し
た.二種類の制御則のうち,一つは腰を自由関節して
歩行するものであり,もう一つはアクチュエータ内の
圧力を調整して腰を受動的弾性関節にして歩行を行う
ものである.弾性腰関節による歩行ではアクチュエー
タに空気を給排気した後弁を閉じて圧力を一定に保つ
ため,この間はエネルギーを消費することなく弾道学
的に脚を振り出すことができる.
実験では自由腰関節による歩行および受動的弾性腰
関節による歩行において,それぞれ歩行可能となる歩
行パラメタ Ts , Te( 自由関節時は Ts のみ)の範囲内
で歩行速度を測定し,両者の比較を行った.その結果,
自由腰関節による歩行ではパラメタを変えても歩行
速度に変化が見られなかったのに対し,弾性腰関節に
よる歩行ではパラメタを変えることで歩行速度が操作
CLOSE
supply air valve
pressure [MPa]
2.8
pressure [atm]
OPEN
supply air valve
agonistic
2.4
2
5
4
3
2
0.1
1.6
0.2
Ts [s]
0.3
0.4
0.36
0.32
0.28
0.24 Te [s]
0.2
0.4
antagonistic
1.2
0
0.1
0.2
OPEN
expel air valve
0.3
0.4
0.5
0.6
(a) Pressure in the agonistic pneumatic actuator at heel strike.
0.7
CLOSE
expel air valve
2.4
2.2
2
1.8
1.6
1.4
1.2
1
0.1
Fig. 8 Pressure trajectory of agonistic and antagonistic
actuator for one step. The trajectory whose pressure
at heel strike is higher indicates the pressure of agonistic actuator and vice versa.
可能であることが分かった.更に実験では歩行パラメ
タと脚振出時の圧力の関係と先の結果から,アクチュ
エータの剛性が高いほど歩行速度が増加することが分
かった.
本稿では受動的弾性腰関節による歩行によって歩行
速度が操作可能であることを,実験によって示した.
しかしいくつかの問題も残った.一つは歩行速度が排
気時間 Te にのみ依存し,給気時間 Ts に依存しなかっ
たことである.また歩行速度を決める物理的な要因に
ついても明らかにならなかった.これらについては今
後の研究課題としたい.
Ts [s] 0.2
0.3
0.4
0.2 0.24 0.28 0.32 0.36 0.4
Te [s]
(b) Pressure in the antagonistic pneumatic actuator at
heel strike.
Fig. 9 Relationship between walking parameters Ts and
Te and the pressure in the agonistic and antagonistic
pressures at heel strike.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
T. McGeer, “Passive Dynamic Walking,” International Journal of Robotics Research, Vol. 9, No. 2,
pp. 62-82, 1990
浅野,羅,山北,力学的エネルギー回復に基づ
く動的歩容生成と制御, 日本ロボット学会誌, Vol.
22, No. 1, pp. 130-139, 2004
S. Goswami and B.Espiau and A.Keramane, Limit
cycles and their stability in a passive bipedal gait,
ICRA96, pp. 246-251, 1996
杉本, 大須賀, 杉江, 連続型遅延フィード バック制
御に基づく脚ロボットの準受動的歩行安定化制
御, 日本ロボット学会誌, Vol. 23, No.4, pp.53-60,
2005
A. D. Kuo, Energetics of actively powered locomotion using the simples walking model, Journal
of Biomechanical Engineering, Vol. 124, No. 1,
pp.113-120, 2002
D. Paluska and H. Herr, The Effect of Series Elasticity on Actuator Work Output, Proceedings of 2005
IEEE Internation Conference on Robotics and Automation (IROS) Workshop on Morphology, Control, and Passive Dynamics, 2005
[7]
, K. Koganezawa and M. Yamazaki, Mechanical
Stiffness Control of Tendon-Driven Joints, Proceedings of IEEE/RAS International Conference on Intelligent Robots and Systems(IROS), pp818-825,
1999
[8] R. Q. van der Linde, Design, Analysis, and Control
of a Low Power Joint for Walking Robots, by Phasic Activation of McKibben Muscles, IEEE Transactions on Robotics and Automation, Vol.15, No.4,
pp.599-604, 1999
[9] C. P. Chou and B. Hannaford, Measurement and
Modeling of McKibben Pneumatic Artificial Muscles, IEEE Transactions on Robotics and Automation, Vol.12, No.1, pp.90-102, 1996
[10] M. Wisse and J. van Frankenhuyzen, Design and
Construction of MIKE ; 2D autonomous biped
based on passeive dynamic walking, 2nd International Symposium on Adaptive Motion of Animals
and Machined (AMAM), CD-ROM, 2002
forward velocity [m/s]
0.7
0.65
0.6
0.55
0.5
0.45
2
3
ago
4
. pr
5
ess
ure
[atm
]
2.4
1.8 2 2.2
1.2 1.4 1.6
]
[atm
ant. pressure
Fig. 10 Relationship between the pressure in the agonistic and antagonistic actuator at heel strike and the
forward velocity.
0.7
(0.08, 0.22)
(0.4, 0.22)
forward velocity [m/s]
0.65
0.6
0.55
0.5
0.45
(0.08, 0.4)
0.4 2
2.5
(0.4, 0.4)
3
3.5
4
4.5
5
5.5
agonistic actuator pressure [atm]
(a) Pressure in the agonistic actuator and the velocity.
forward velocity [m/s]
0.7
0.65
(0.08, 0.22)
(0.4, 0.22)
0.6
0.55
0.5
0.45
(0.4, 0.4)
(0.08, 0.4)
1.2
1.4
1.6
1.8
2
2.2
antagonistic actuator pressure [atm]
2.4
(b) Pressure in the antagonistic actuator extracted.
Fig. 11 Relationship between the pressure in the agonistic and antagonistic actuator at heel strike and the
forward velocity from Figure 10. Sets of numbers,
such as (0.08, 0.22), correspond to the set of the supply and the expel duration (Ts , Te ) in seconds.
© Copyright 2026 Paperzz