MP2000 シリーズマシンコントローラ
MP2400
キ
レ
の
あ
る
モ
ー
シ
ョ
ン
で
機
械
を
高
速
化
!
コンパクトユニット形
キレのあるモーションで
機械を高速化できます。
業界最小サイズのコントローラ
複雑な機械の動きを高速にするには ,
プログラムの高速処理やネットワークの
高速化が不可欠です。
MP2400 は,高速 CPU と
MECHATROLINK- (10Mbps) の
採用により, 小形でありながら,複数軸に
対してキレのある高速モーションを
実現します。
当社 MP2000 シリーズ比較
制御軸数
最大軸数
128
48
32
16
製品名
外形寸法
MP2400 MP2300S
46
MP2300
MP2200
120
240
64
単位 : mm
16 軸 制御
最大
130
16 軸制御をシンプルに実現。
システム構成例
サーボユニットとタッチパネルを接続するだけで
省スペース,省配線のスタンドアロンシステムが
構築できます。I/O は MECHATROLINK 協会の
パートナーメンバの特長ある製品が使用できます。
また PLC を Ethernet に接 続すれば,上 位
PLC システムが構築できます。
Ethernet
タッチパネル
PLC
MP2400
MECHATROLINK-
パートナー I/O 製品
Bit 分散 I/O ターミナル
( 株式会社エニイワイヤ殿 )
/
MECHATROLINK- と
Ethernet を標準装備。
-Stick
インラインバスカプラ
( フェニックス .コンタクト株式会社殿 )
JUNMA
機械の動作設定が簡単にでき,
自在な動きを実現。
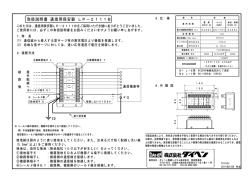
●直線補間 , 円弧補間 , ヘリカル補間
●複数プログラムの同時 / 独立実行
モーションネットワーク : MECHATROLINK●通信速度 : 10Mbps
●位置制御 ( 位置決め , 補間制御 ), 速度制御 ,トルク制御
Ethernet (100Mbps)
●タッチパネルとの高速通信 ( 自動受信可 )
●上位 PLC とラダープログラムレスで通信 (I/O メッセージ通信 )
●エンジニアリングツール MPE720 との高速通信
2
円弧補間部
直線補間部
R
ヘリカル補間
MP2400
MP2400 製品仕様
仕 様
項 目
電源
入力電源電圧 : DC24V ±20%
Ready 出力
CPUReady ステータス出力 1 点
1 回線 (1 ポート ) マスタ 終端抵抗内蔵
通信方式 : MECHATROLINK通信周期 : 0.5ms,1ms,1.5ms, 2ms
1 回線 100 base-TX /10 base-T
通信方式 : IEEE 802.3u, イーサネット Ver.2(DIX 仕様 )
伝送プロコトル : TCP, UDP, IP, ARP, ICMP, DHCP
アプリケーション : MEMOBUS, 拡張 MEMOBUS, Modbus/TCP*1
MELSEC*2 (A 互換 1E フレーム ) プロコトル
モーションネットワーク
MECHATROLINK-
上位インタフェース
Ethernet
自動受信機能搭載
項 目
制 御 仕 様
高速スキャン , 低速スキャンの 2 レベルスキャン
高速スキャンタイム設定 : 1.0 ∼ 32ms ( メカトロリンク通信周期の整数倍 )
低速スキャンタイム設定 : 2.0 ∼ 300ms ( メカトロリンク通信周期の整数倍 )
制御方式
モーションプログラム : 高速スキャンで実行
: 位置決め , 直線補間 , 円弧補間 , 原点復帰
( モーション言語以外に特殊命令で速度制御 , トルク制御が可能 )
指令単位 : mm, inch, deg, pulse
最小設定単位 : 1, 0.1, 0.01, 0.001, 0.0001, 0.00001
最大指令値 : −2147483648 ∼ +2147483647
加減速タイプ : 直線,非対称,S 字
シーケンスプログラム : 高速または低速スキャンで実行
テキスト形式言語 : 数値演算 , 論理演算
専用モーション言語
モーション制御
製品概要
データメモリ
共通データ (M) レジスタ
シーケンス制御
: 64k ワード
システム (S) レジスタ : 4k ワード
ローカル (D) レジスタ : 最大 16k ワード / プログラム
定数 (#) レジスタ : 最大 16k ワード / プログラム
形
式 : JEPMC-MP2400-E
概算質量 : 0.3kg
MECHATROLINK-
データタイプ
ビット ( リレー )
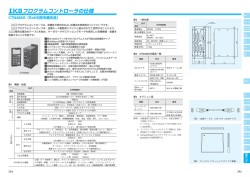
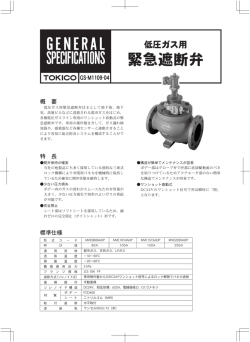
外形寸法 単位 : mm
電源24VDC
電源コネクタ(3P)
Ethernet(100Mbps)
(21)
45
108
DIN レール*
(35mm 幅 )
形式銘板
(10 : DIN レール装着時)
*
*
Ready出力 (CPU状態)
リレー用コネクタ(2P)
1 : Modbus/TCP は,Modicon Inc. の登録商標です。
2 : MELSEC は,三菱電機株式会社の登録商標です。
130
プログラム仕様
(14 : 開放時)
プログラム容量
: ON/OFF
整数 : −32768 ∼ +32767
倍長整数 : −2147483648 ∼ +2147483647
実数 : + / − (1.175E−38 ∼ 3.402E+38)
フラッシュメモリ : 5.5MB テキスト形式プログラム 800K キャラクタ相当
( モーションプログラムとシーケンスプログラムを合わせて )
モーションプログラム / シーケンスプログラム : 最大 256 本 ( 合計 ),
階層はそれぞれ 8 重まで
同時実行タスク : モーションプログラムとシーケンスプログラムを合わせて 16 本
* : 金具取り付けもできます。
3
モーション動作実行までの
手順を大幅に短縮。
簡単プログラミング
モーションプログラムを作成し,実行順序を登録するだけで,
上位 PLC からプログラムレスでモーションプログラムを起動できます。
複数個のプログラムを登録すれば複雑な動きが実現できます。
シーケンス制御はラダープログラム方式にかわり,テキスト言語を採用しています。
現行 MP2000 シリーズ
MP2400
配線 & セルフコン
フィグレーション
配線 &
セルフコンフィ
グレーション
グループ定義
プログラミング
( モーション )
ラダー
プログラミング
( モーションコール )
ラダー
プログラミング
( 通信 )
短 縮
プログラミング
( モーション )
モーション実行
セルフコンフィグレーション
テスト運転
接続機器を自動認識 , 面倒な定義が
一切不要。即プログラミングが可能。
即 , 段取り移動が可能
→モー ションプログラム なしで
軸移動が可能。
SW 選択して
電源入り切り
モーション実行
定義が自動
作成される
プログラミング
モーションエディタ
命令を記憶する必要はありません。
→命令をポップアップ表示 , 命令を
選択するだけでプログラムが作
成できる。
運転制御パネル
作成したプログラムはその場で
デバッグ運転
→モー ション エ ディタ 画 面 から
モーションプログラムが起動。
モーション実行
プログラムの登録
制御信号レジスタを自動割り付け。
4
Ethernet 通信
I/O メッセージ通信
PLC から簡単起動
I/O メッセージ通信で制御信号を
オンして実行
→通信設定するだけでプログラム
不要。
MP2400
シーケンスプログラム
シーケンス制御も簡単
→モーションプログラムと同様にテキスト言語採用で簡単作成。
シーケンスプログラムからモーションプログラムの
実行も可能
モーション命令
命 令
種 類
軸移動命令
コントロール
充実したモニタ画面
命令
速度・加速度
命令
軸アラームモニタ
高度な
コントロール
命令
制御命令
軸運転モニタ
エンジニアリングツール
MPE720 Ver.6 Lite 使用条件
エンジニアリングツール
MPE720 Ver.6 Lite は,
e-メカサイトから
ダウンロードして
ご使用いただけます。
MPE720 Ver.6 Lite を快適に操作するためのパソコンの仕様は,
シーケンス
以下のとおりです。インストールする際,パソコンの仕様をご確認
制御命令
ください。
CPU
メモリ
ハードディスク
解像度
CDドライブ
通信ポート
OS
その他
Pentium 800MHz 以上
または相当品 (1GHz 以上推奨 )*1
128MB 以上 (256MB 以上推奨 )*2
200MB 以上の空き容量が必要 *3
解像度 1024 × 768 以上 , High Color (16bit)
1 基 ( インストール時のみ )
Ethernet
Windows 2000 SP1 以上または Windows XP
Internet Explorer 5.5 以降
Adobe Reader Ver.6.00 以上
CPU 相当品でも可能です。
* 12 :: インテル社製以外の
更にメモリを
* 他のアプリケーションを同時に動作させる場合は,
増設してください。メモリ資源獲得が頻繁に行われパフォー
マンスが低下する場合があります。
3 : インストール後の標準作業スペースを含みます。 ( 注 ) 記載した製品名,会社名などの固有名詞は,各社の商標,登録
商標,または商品名です。
*
シーケンス
プログラム
専用命令
機 能
MOV
MVS
MCW
MCC
ZRN
SKP
MVT
EXM
ABS
INC
POS
PLN
MVM
PLD
ACC
SCC
VEL
IAC
IDC
IFP
FMX
PFN
INP
SNG
UFC
MSEE
TIM
IOW
END
RET
EOX
IF, ELSE, IEND
WHILE,
WEND
PFORK,
JOINTO,
PJOINT
SFORK,
JOINTO,
SJOINT
=
+, −,
位置決め
直線補間
円弧補間,ヘリカル補間 ( 時計回り)
円弧補間,ヘリカル補間 ( 反時計回り)
原点復帰
スキップ命令
時間指定位置決め
外部位置決め
アブソリュートモード
インクリメンタルモード
現在値変更
座標平面指定
機械座標変更
プログラム現在位置更新
加速時間変更
S 字時定数変更
送り速度変更
補間加速時間変更
補間減速時間変更
補間送り速度比率設定
補間送り最高速度設定
インポジションチェック
第 2 インポジション設定
シングルブロック無視
ユーザー関数呼び出し
サブプログラム呼び出し
時間待ち
入出力変換待ち
プログラム終了
サブプログラム終了
*1
*1
1 スキャン WAIT 命令
分岐命令
繰り返し命令
*1
*1
並列実行命令
選択実行命令
代入
*
, / , MOD
| , ^ , &, !
SIN, COS, TAN, ASN,
ACS, ATN, SQRT,
BIN, BCD
ASCII
= = ,〈〉, 〉,
〈 , 〉= ,〈 =
SFR, SFL, BLK, CLR
( ), S {}, R {}
PON, POF, TON, TOF
SSEE
数値演算
論理演算
*1
*1
*1
関数命令
ASCII 変換
数値比較命令
データ操作命令
その他
*1
*1
*1
*1
*1
立ち上がり/ 立ち下りパルス,
オンディレー,オフディレー
シーケンスプログラム呼び出し
*2
*2
無印 : モーションプログラム専用
1 : モーションプログラム /シーケンスプログラム共用
2 : シーケンスプログラム専用
*
*
5
MECHATROLINK- 対応モジュール仕様
項 目
64 点入出力モジュール (IO2310/IO2330)
仕 様
入力 : 64 点 DC24V, 5mA, シンク / ソース兼用
出力 : 64 点 DC24V, 50mA( 全点 ON)*
入力信号
シンク出力 (IO2310), ソース出力 (IO2330)
信号接続方式 : コネクタ (FCN360 シリーズ )
DC24V(20.4 ∼ 28.8V)
定格電流 : 0.5A 突入電流 : 1A
モジュール電源
形式 : JEPMC-IO2310
概略質量 : 590g
形式 : JEPMC-IO2330
概略質量 : 590g
* : 1 点当たりの最大定格は 100mA( ディレーティング条件による )
カウンタモジュール (PL2900)
パルス出力モジュール (PL2910)
形式 : JEPMC-PL2900
概略質量 : 300g
項 目
形式 : JEPMC-PL2910
概略質量 : 300g
機能
パルス入力方式
最高計数速度
パルス入力電圧
外部供給電源
仕 様
項 目
仕 様
入力チャネル数
2
出力チャネル数
2
パルス位置決め , JOG 運転 , 原点復帰
CW, CCW パルス , 符号 + パルス
500kpps
DC5V
パルス計数 , ノッチ出力
機能
符号 + パルス (1/2 逓倍 ),
パルス出力方式
A/B 相パルス (1/2/4 逓倍 ),
最高出力速度
加算・減算パルス (1/2 逓倍 ),
パルス出力電圧
1200kpps(4 逓倍時 )
DC3/5/12/24V
入力信号用 : DC24V
負荷駆動用 : DC24V
モジュール用 : DC24V(20.4 ∼ 26.4V)
120mA 以下
オープンコレクタ出力
パルス受け渡し回路
DC5V, 10mA/ 回路
ディジタル入力 : 8 点 / モジュール
DC5V×4 点 , DC24V×4 点
ディジタル出力 : 6 点 / モジュール
外部制御信号
DC5V×4 点 , DC24V×2 点
アナログ入力モジュール (AN2900)
アナログ出力モジュール (AN2910)
形式 : JEPMC-AN2900
概略質量 : 300g
形式 : JEPMC-AN2910
概略質量 : 300g
仕 様
項 目
入力チャネル数
入力電圧範囲
入力インピーダンス
データ範囲 ( バイナリ)
入力遅延時間
誤差
外部供給電源
仕 様
項 目
4
−10V ∼ +10V
1MΩ 以上
−32000 ∼ +32000
4ms 以下
±0.5%F.S(25˚C), ±1.0%F.S(0 ∼ 60˚C)
DC24V(20.4 ∼ 26.4V), 120mA 以下
2
−10V ∼ +10V
±5mA(2kΩ)
−32000 ∼ +32000
1ms 以下
±0.2%F.S(25˚C), ±0.5%F.S(0 ∼ 60˚C)
DC24V(20.4 ∼ 26.4V), 120mA 以下
出力チャネル数
出力電圧範囲
許容最大負荷電流
データ範囲 ( バイナリ)
出力遅延時間
誤差
外部供給電源
外形寸法 単位 : mm
64 点入出力モジュール
カウンタ,パルス,アナログモジュール
20
120
(4.5)
152
4.5
RUN TX
1
2
3
4
5
6
7
8
120
DDI
343
30
5
6
7
8
120
DDI
343
30
121
161
152
4.5
3
4
4.5
30
2
C
N
2
取付穴加工寸法 ( 2 通り)
取付穴加工寸法
111± 0.2
1
C
N
1
9.5
4.5
44
RUN TX
4-M4 タップ
・底面取付用
・背面取付用
6
2-M4 タップ
60± 0.2
121± 0.2
152± 0.3
30± 0.2
130
4.5
4.5
89.8
111
79
(4.5)
108
152± 0.3
2-M4 タップ
MP2400
MECHATROLINK 対応 I/O 製品
MECHATROLINK 協会のパートナー製品が使用できます。
ビット分散 I/O ターミナル ( 株式会社エニイワイヤ製 )
インラインバスカプラ ( フェニックス .コンタクト株式会社製 )
インラインバスカプラ IL M BKDI8 DO4-PAC は
デジタル入力 8 点,出力 4 点を標準装備。
アナログ入力,アナログ出力,
パルス入力,パルス出力を増設可能。
デジタル
入・出力モジュール
アナログ
入・出力モジュール
問い合わせ先 :
フェニックス .コンタクト株式会社
http:/ www.phoenixcontact.com/jp
AnyWire Bitty シリーズノ I/O ターミナルガ使用できます。
省配線バスによる I/O 接続で最大 432 点まで拡張可能。
問い合わせ先 :
株式会社エニイワイヤ
http:/www.anywire.jp
省配線バス
形式 : IL M
BK DI8
DO4-PAC
1/ 2 点 I/O
ターミナル
4/8/16 点 I/O
ターミナル
手配品リスト
手配品の詳細は MP2000 シリーズカタログ (KAJP C88070 015) をご参照ください。
名 称
形 式
概 要
コンパクトユニット形マシンコントローラ
MP2400
上記用取り付け金具
DIN レール取り付け部品
バッテリ
JEPMC-MP2400-E
JEPMC-OP2400-E
JEPMC-OP300
JZSP-BA01
オプション
付属
周辺ソフトウェア
エンジニアリングツール
技術 製品サイト (http://www.e-mechatronics.com) からダウンロード
MPE720 Ver.6 Lite
制御情報モニタツール
MPLOGGER
CPMC-MPG700
Excel で制御情報のモニタが可能
CPMC-MPL700C
MPE720 を介さずに MP2400 にデータを転送
CPMC-MPL710
アプリケーションデータから自動転送用簡易データを作成するツール
データ転送ツール
MPLoader
自動転送データ作成ツール
MPLoadMaker
AC サーボドライブ
対応サーボモータ
サーボパック
MECHATROLINK 仕様
回転形
SGDS-
12A 形
小
容
量
中
容
量
シリーズ
Linear
-mini : SGMMJ 形
ダイレクトドライブ
小容量シリーズ
スーパーハイパワーレートシリーズ : SGMAS 形
SGMCS 形
フラットシリーズ : SGMPS 形
中容量シリーズ
スーパーハイパワーレートシリーズ : SGMGH 形
SGMCS 形
高速フィードシリーズ : SGMGH 形
コアレス : SGLGW 形
SGDS-
コア付き F 形 : SGLFW 形
15A 形
コア付き T 形 : SGLTW 形
シリンダ形 : SGLCW 形
小
容
量
シリーズ
JUNMA シリーズ
MECHATROLINK 対応分散 I/O
64 点入出力モジュール (IO2310)
64 点入出力モジュール (IO2330)
カウンタモジュール (PL2900)
パルス出力モジュール (PL2910)
アナログ入力モジュール (AN2900)
アナログ出力モジュール (AN2910)
スーパーハイパワーレートシリーズ : SGMAH 形
フラットシリーズ : SGMPH 形
SGDHEA 形
高速フィードシリーズ : SGMGH 形
〈MECHATROLINK モジュール〉
中 スーパーハイパワーレートシリーズ : SGMSH 形
容
JUSP-NS115 形
量 高速シリーズ : SGMUH 形
フラットシリーズ : SGMDH 形
SJDEANA 形
JUNMA シリーズ : SJME 形
JEPMC-IO2310
JEPMC-IO2330
JEPMC-PL2900
JEPMC-PL2910
JEPMC-AN2900
JEPMC-AN2910
コアレス : SGLGW 形
小容量シリーズ
コア付きF形 : SGLFW 形
SGMCS 形
コア付きT形 : SGLTW 形
中容量シリーズ
シリンダ形 : SGLCW 形
SGMCS 形
入力 64 点 , 出力 64 点 ( シンク出力 )
入力 64 点 , 出力 64 点 ( ソース出力 )
可変カウンタ 2 チャネル
パルス出力 2 チャネル
アナログ入力
アナログ出力
−10 ∼ +10V 2 チャネル
−10 ∼ +10V 2 チャネル
ケーブル , ほか
MECHATROLINK- ケーブル
終端抵抗
リングコア
IO2310, IO2330 用入出力ケーブル
Ethernet 通信ケーブル
JEPMC-W6002JEPMC-W6003JEPMC-W6022
JEPMC-W6021
JEPMC-W5410-
両端コネクタ付き 0.5m ∼ 50.0m
両端コネクタ, リングコア付き 0.5m ∼ 50.0m
MECHATROLINK- 用
MECHATROLINK- ケーブル用
片側ばら出しケーブル
市販品をご使用ください。
7
MP2400
安全上の
ご注意
正しくご使用ください。
・ ご使用の前に取扱説明書とその他の付属書類をすべて熟読し,
人体に危害を及ぼすおそれがある装置(原子力
・ コントローラの故障や誤作動が直接人命を脅かしたり,
制御,
航空宇宙機器,
交通機器,
医療機器,
各種安全装置など)に使用する場合は,
その都度検討が必要
ですので,
当社代理店または最寄りの営業所へご照会ください。
本製品が故障することにより,
人命にかかわる
・ 本製品は厳重な品質管理のもとに製造しておりますが,
ような危険な状況,
及び重要な設備などで重大な損失発生が予測される設備への適用に際しては,
重
大な事故にならないような安全装置を設置してください。
・ 配線工事は電気工事の専門家が行ってください。
・ お客様による製品の改造は行わないでください。
MP2000 シリーズラインアップ
MP2200
フレキシブル
マシンコントローラ
( 最大256 軸制御)
MP2300/
MP2310
オールインワン形
マシンコントローラ
( 最大48 軸/64 軸制御)
MP2300S
MP2500
オールインワン形
マシンコントローラ
( 最大32 軸制御)
パネル一体形
マシンコントローラ
( 最大32 軸制御)
MP2100/
MP2100M
ボード形
マシンコントローラ
( 最大16 軸/32 軸制御)
© Copyright 2026 Paperzz