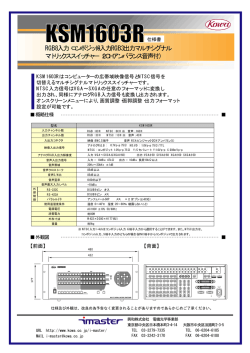
平成 15,16 年度 経常研究 カメラによる物体の3次元位置検出に関する研究 工業技術センター 企画情報課 柏木利幸 1.研究目的 3次元空間をカメラで撮影し,その空間内に存在する物 体の3次元的な位置をカメラの合焦点位置より検出する 手法を開発する.これによりカメラ1台で,簡単に距離 計測が可能となる.新たに開発した合焦評価手法を,NTSC 方式のカメラおよび最近普及してきた IEEE1394 カメラに 適用し,合焦位置検出精度と合焦評価の安定性について 図1 パン・チルト・ズームカメラ 検討し,距離検出実験を行った. 2.研究方法 実験にはコンピュータより,パン(左右),チルト(上下),ズームおよびフォーカス の制御が行えるカラーカメラを使用した.まず,このカメラのパン,チルトをコントロ ールし,撮影可能範囲のパノラマ画像を取得する.つぎに,パノラマ画像中の任意の物 体を指定後,カメラの中心をその物体に合わせ,ズームとフォーカスを制御し,その物 体の合焦位置を求める.最後に,合焦位置でのズーム値とフォーカス値より予め作成し ておいた距離テーブルよりカメラから物体までの距離を取得する. 3.研究成果 図1の NTSC 方式のカメラを用いて図2のようなパノラマ画像を自動で取得し,図2中 の A∼F について合焦を評価後,距離検出を行った結果を表1に示す.A と F は無地の壁 面で,従来のオートフォーカス方式では正確に焦点を合わせることができなかったが, 表1 距離計測結果 (cm) 開発した合焦評価手法では焦点合わせが 可能であった.NTSC 方式のカメラを用い A B C D E F た実験では,被写体の種類や検出距離に 実験結果 292 98 232 450 550 232 よっては 10%程度の誤差が,また IEEE1394 294 101 221 400 592 230 実測値 カメラでは 5%程度の誤差があった. F A C B 図2 パノラマ画像 D E
© Copyright 2026 Paperzz