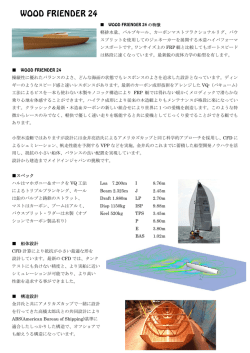
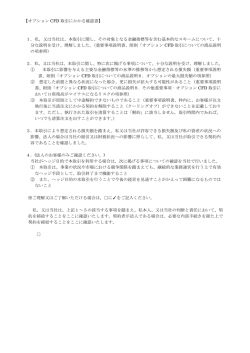
「セーリングヨットと帆走性能」シンポジウム 2010 年 8 月 第2章 水槽試験とその活用 松井 亨介*、 金井 亮浩** 目次 2.1 まえがき 2.4 ヨットデザインにおける水槽試験 2.2 ヨットの水槽試験とは 2.5 おわりに 2.3 ヨットの水槽試験解析方法 2.1 まえがき 1987 年 4 月、ニッポンチャレンジアメリカ杯 1991 委員会(以後ニッポンチャレンジと称す) が発足し、日本からのアメリカズカップ初挑戦を宣言した。同時にニッポンチャレンジ技術チ ームが組織され、技術開発戦争といわれる挑戦艇の開発計画が立てられた。技術開発は構造・ 性能・セールの 3 本柱からなり、そのうち性能関係は船型開発の過程で不可欠な水槽試験を得 意とする造船会社を中心に計画されたが、当時日本ではほとんど経験のなかったヨットの水槽 試験であったため、ヨットの水槽試験とは何かの検討から始め、試験計画立案、試験方法の検 討、試験装置および模型船の設計・製作を経て、9 月には日本で初めての本格的なヨットの船 型開発のための水槽試験を開始した(図 2.1)。それを契機に日本のヨットの水槽試験はニッポ ンチャレンジの挑戦艇の開発をドライビングフォースとして大きく発展した[1]。 ヨットの水槽試験も一般船舶と同様に、目的(検討項目)に応じて多種多様な水槽と試験法 が考えられる。1987 年に始まったアメリカズカップ挑戦艇設計のための水槽試験でも、曳航水 槽における船型開発を目的とした水槽試験(船型試験)のほかに、回流水槽におけるキール回 りの流れの可視化試験、曳航水槽におけるキール単体抵抗試験等を実施している。 ここでは、ヨットの水槽試験の特徴や水槽のしくみ、ヨット特有の試験の方法とその解析方 法を説明し、最後にヨットデザインにおける水槽試験の役割等を述べる。 図 2.1 ヒール自由試験、1987 年 * ** 三井造船(株) (有)エイ・シー・ティー 23 2.2 ヨットの水槽試験とは 2.2.1 造船の水槽試験とは(水槽試験の基礎知識) ヨットの水槽試験の話にはいる前に、造船の水槽試験とは何かを紹介する。 水槽とは 造船の水槽とは、船の性能を調べるため精密な模型船を浮かべて性能試験を行うプールのこ とで、用途に応じて模型船を曳航する細長い曳航水槽や、模型船を固定して水を循環させる回 流水槽などがある。ここでは主に船の推進性能試験に使う曳航水槽について述べる。 曳航水槽の例として、ニッポンチャレンジの水槽試験に用いた三井造船昭島研究所の大水槽 と小水槽を図 2.2、図 2.3 に示す。細長い水面の両脇にレールが敷かれ、その上に水面をまた ぐ格好で電車(計測台車)が載っている。電車は速度が 1mm/sec まで制御できる動く実験室 で、運転制御盤やコンピュータにつながった計測・解析機器が並んでいる。電車と水面に浮か ぶ模型船は、検力装置、ガイド装置や信号ケーブルで接続される。 試験は、ガイド装置で模型船の姿勢などを決め、船速に相当する速度で電車を走らせ、その とき船が水から受ける力(抵抗、横押力など流体力)や姿勢を計測する。 図 2.2 図 2.3 水槽例1(長さ 220m×幅 14m×水深 6m) 水槽例2(長さ 100m×幅 5m×水深 2.15~0.2m) 水槽の歴史 世界で最初の本格的な水槽は、1872 年に建設された英国のウィリアム・フルードの水槽であ る。フルードは近代造船学の父といわれ、彼が発見した「フルードの相似則」 (2.3.2参照) は水槽試験の大前提になっている。この水槽の建設目的は、 「相似模型の実験を精密に行って実 24 船性能を正しく見積もること」と「形の異なった船の間の抵抗の関係を明らかにすること」で、 水槽試験の目的をよく言い表している。 その後、造船学の進歩と共に次々に水槽が建設され、現在世界で約90の水槽が活動してい る。日本では、1907 年、長崎に三菱・長崎造船所の水槽が建設されて以来、現在産学官あわせ て約20機関の水槽が活動している。 水槽試験の目的と内容 造船の代表的な水槽試験である平水中推進性能試験(船型試験)の目的は、ある船型の相似 模型の試験を行い実船の推進性能(速度と所要馬力等の関係)を推定することや、模型試験を 行いながらより速い船型やより燃費効率の良い船型を求めて船型改良を行うことである。つま り、現在も前述のフルードの水槽建設目的そのものである。 船の抵抗は、水の粘性に起因する摩擦抵抗成分と重力に起因する造波抵抗成分から成り、そ れぞれを支配するパラメータはレイノルズ数とフルード数である。水槽試験では2つのパラメ ータを同時に合わすことはできないのでフルード数を一致させる。フルード数を合わせた速度 では、実船と模型で船の大きさと船が造る波の形が相似になり、水槽で実船と同じ造波抵抗係 数を求めることができる。レイノルズ数は一致させることができないので、粘性抵抗は推定す ることになる(詳しくは2.3.2参照) 。 実船の推進性能を推定するために、抵抗試験、自航試験などを行う。これらの試験を総称し て船型試験と呼んでいる。抵抗試験は、模型船を電車で計測装置を介して曳航し速度と抵抗の 関係を計測する試験で、自航試験は、模型船をプロペラで自航させて速度と必要スラスト・ト ルクの関係を計測する試験である。模型試験が終わると、水槽で得られたデータに工学的解析 処理を施し実船の推進性能を推定する(2.3.2参照) 。一般に模型試験から実船の性能推定 までが水槽の役割である。 一般船舶の船型試験は、造船水槽ではほとんど完成された技術で、実船速度 0.1 ノット以下 の精度で自信を持って推定することができる。その精度追及が造船水槽の使命であり、造船学 を進歩させる推進力であった。 その内容とスケールを感覚的に理解するために典型的な例をあげると、 「全長 280m、排水量 15 万トン、エンジン出力 20,000kW、速力 16.0 ノットの貨物船を設計したが、速度がでるか どうか水槽試験してほしい」との依頼を受け、縮尺 1/50、全長 5.6m の相似模型を製作し、抵 抗・自航試験を行い、模型データから実船性能を推定した結果、 「OK、16.1 ノット出ます」ま たは「15.9 ノットしか出ない。船型改良の要あり」との評価レポートを提出する。これが造船 の水槽であるが、1987 年、そこに「ヨットの水槽試験」の依頼が舞い込んできたわけである。 2.2.2 ヨットの水槽試験の歴史 ヨットの水槽試験を始める前にその歴史を調べてみよう。ヨットの水槽試験の発達はアメリ カズカップの歴史とかかわりが深い。始まりは 1903 年第 12 回レースのイギリス挑戦艇「シャ ムロックⅢ」の実験に遡り、この時は直立時とヒール時の抵抗を測定している[2]。 リーウェイした時の横押力を測定し風上航の抵抗推定を可能にしたのはスティーブンス工科 大学(SIT)で、1937 年第 16 回レースのアメリカ防衛艇である「レンジャー」の設計に用い て成功を納め、ヨット界にも水槽試験の有用性を示した[3]。その後、8 艇の防衛艇が、SIT で 1/13 スケール模型を用いて実験を行い設計された。 25 1970 年代になると、1/13 模型の実験から生まれた艇の成績が必ずしも良くない例があった り、造船の水槽試験でもスケールの問題の研究[4,5]が進んだ時期で、1/3 など大型模型が使わ れるようになる。また、アメリカでは水槽試験より、実績に裏付けられた豊富な実船データ、 つまり優れたデザイナーの経験を重視する傾向になり、1983 年の防衛艇「リバティ」はついに 水槽試験を行わなかった。 この頃、カナダの NRC(National Research Council of Canada)で、実際の帆走状態と同 じ状態で模型を曳航する試験法[6,7]が開発され、オランダの水槽 MARIN(Maritime Research Institute Netherlands)でもこの試験法の研究がすすめられていた。 オーストラリアの挑戦チームはこの MARIN で密かに水槽試験を行い、全く新しいキールの アイデアを水槽試験で検証し、あのウィングキ ール(図 2.4)を付けた挑戦艇「オーストラリ アⅡ」を完成した[8]。1983 年第 25 回レース、 ウィングキールの「オーストラリアⅡ」は、水 槽試験を行わなかった「リバティ」を破り、132 年間アメリカが守ってきたカップを南半球に持 ち去った。このウィングキールの登場はヨット 界に衝撃を与え、その開発に重要な役割を果た 図 2.4 ウイングキール 1983 年 した水槽試験の意義を再認識させた。 1987 年、アメリカの「スターズ&ストライプス」がカップを取り返した第 26 回レースでは、 全ての艇がそれぞれ水槽試験と数値計算を駆使して開発したウィングキールを付けてきた。ヨ ットの水槽試験もビジネスとなり、MARIN では 8 チームの艇の実験解析を行った。 日本では、ニッポンチャレンジがアメリカズカップ挑戦を宣言した 1987 年当時、造船技術・ 水槽試験技術で世界のトップであったが、ヨットの水槽試験の歴史は浅く、その 10 数年前か ら継続的に行われていた大阪大学の研究[9~14]くらいであった。1987 年に始まったニッポン チャレンジの水槽試験は、日本で最初の本格的なヨット設計のための水槽試験である。 2.2.3 ヨットの水槽試験の特徴 ヨットは、セールに作用する空気流体力 (Aerodynamic Force)と、水面下の艇体・舵・ キ ー ル に 作 用 す る 水 流 体 力 ( Hydrodynamic Force)が釣り合った点で定常帆走をする(図 2.5) 。 定常帆走状態のヨットは、風によるセール流体力 に見合うだけ、風下側に傾き(ヒール)、横流れ(斜 航、リーウェイ)し、舵を少し切ったまま前進し ている。このとき水面下の船体形状と流体力は進 行方向に対して左右非対称になる。 ヨットの水槽試験の特徴は、傾き、横流れしな がら前進する実際の帆走状態での速度を推定する ために、直立直進抵抗試験だけではなく、ヒール 26 図 2.5 ヨットに作用する流体力 角とリーウェイ角がついた状態でも精密な流体力計測試験を行うことである。模型船をヒー ル・リーウェイさせる方法、データの解析法、実船の帆走状態の速度を推定する方法等、ヨッ ト特有のものである。 2.2.4 ヨットの供試模型 模型の縮尺は、使用水槽に対して適切な寸法であること、想定最高速度が出せること、重量 的に製作可能であること、取扱い上の無理がないこと、製作予算等の条件を満たす範囲で最大 になるように決める。 1987 年に始めた「12m 級」の水槽試験模型の縮尺は 1/8 にした。これは試験に使用した小 水槽の仕様(長さ 100m・最高速度 4m/s)に合わせたことと、当初から約 20 隻のシリーズ模 型を製作する計画であったので、経済的配慮から若干小さく設定した。1991 年のレースに向け た「IACC」規格艇では、計測精度をさらに上げるためと、模型重量の制約を緩和するために、 「12m 級」より相対的に大きく設定し縮尺は 1/7 にした。その後、2000 年の挑戦艇の開発で は、計測精度をさらに上げるために、アペンデージ付き模型は 1/5 としている(表 2.1)。 ヨットの模型製作上の要点は、軽く、強くすることである。とくに、キール重量が排水量の 80%を占める実艇と重心位置を合わす必要がある場合、実艇同様の重いキールを付けられるよ うに、軽くて強い艇体にしなければならない。そのためにアルミ板と合板を縦通強度部材にし て、比重 0.1 のウレタンブロックで艇体を成形した(図 2.6) 。 艇体の乱流促進法は、12m 級の水槽試験を始める際に検討した結果、水線長の前から 10% 位置に、2 列、10mm 間隔、1.5mm 高さのスタッドによることにした。 表 2.1 主要目 12m 級 IACC 実艇 1/8 模型 実艇 1/7 模型 1/5 模型 全長 20m 2.5m 24m 3.4m 4.8m 水線長 13.5m 1.7m 18.5m 2.6m 3.7m 排水量 25 トン 50kg 25 トン 70kg 200kg 想定最高速度 20 ノット 3.6m/s 15 ノット 2.9m/s 3.5m/s 図 2.6 模型断面 27 2.2.5 ヨットの水槽試験の種類 ヨットの定常帆走速度性能を調べるためには、直立直進抵抗試験(URT;Upright Resistance Test)と、リーウェイ角とヒール角をつける斜航試験(LHT;Leeway Heel Test)の 2 種類の 曳航試験を行う。 直立直進抵抗試験(URT)は、曳航水槽で行う通常の抵抗試験と同じで、リーウェイ・ヒー ル付き斜航試験(LHT)は、傾いて斜めに帆走するヨット特有の試験である。さらに LHT は ヒールを拘束するか自由にするか2つの試験がある 直立直進抵抗試験(URT;Upright Resistance Test) リーウェイ・ヒール付き斜航試験(LHT;Leeway Heel Test) ヒール自由試験(自由帆走試験) ヒール拘束試験 直立直進抵抗試験(URT) ヨットの速度性能評価においても、直立直進状態(Upright)の抵抗性能は基本的かつ重要 なもので、一般船舶の抵抗試験と同様の計測精度が望まれる。後述のリーウェイ・ヒール付き 斜航試験(LHT)装置でも直立直進状態の抵抗計測はできるが、LHT 装置は模型を拘束する ため機構が複雑になり、摩擦・捻れによる計測誤差がさけられない。抵抗の計測精度を上げる ため、試験能率は悪いが、URT と LHT の装置は兼用せずに別のものを使用している。 ヨットの URT の特徴は曳航点が高いことで、空力作用点(CE;Center of Effort)相当高さ を曳航する。水槽試験用 CE 点高さは、通常はセール面積中心で与えられ、IACC の 1/7 模型 では、水面から約 2m の高さで曳航する。 URT 装置は、通常の抵抗試験用スウィングガイドとクランプ、それと抵抗計測部から構成さ れる。抵抗計測は、模型船にマスト(釣り竿を使用)を立て、CE 高さに取り付けた細いワイ ヤを曳引車に固定したロードセルで直接曳航する方法で行った。 船型比較のための抵抗試験は、排水量一定で行った。 図 2.7 直立直進抵抗試験例 28 リーウェイ・ヒール付き斜航試験(LHT) ヨット特有のリーウェイとヒールを伴った斜航試験(LHT)には、ヒールを自由にする方法 と拘束する方法の二つの試験法がある。その特徴を表 2.2 に示す。 1987 年、昭島研究所で開始したヨットの水槽試験はヒール自由試験から始めたが、15 隻の シリーズ模型について一巡後、カナード(前舵)の設計用に汎用性のあるデータが得られるヒ ール拘束試験の要望があり、既存の PMM 試験装置を用いてヒール拘束試験を試行した。そし て二つの試験法について船型開発の観点から比較検討した結果、ヒール拘束試験が設計には有 用かつ汎用性があることを確認した。1988 年秋以降の新規格「IACC」ヨットについては、LHT はヒールを拘束する方法で試験を行っている。 表 2.2 2つの LHT ヒール拘束試験 ヒール自由試験 試験法の開発 SIT NRC、MARIN 試験装置 図 2.10 参照 図 2.8 参照 ・水槽既存の装置を応用できる ・専用装置を設計製作する必要がある 試験点数の例 速度:4 速度:4 (航走数) リーウェイ角:4 リーウェイ角:4 ヒール角:4 4×4=16 点 4×4×4=64 点 ・試験時間が少なく、試験費用の節約が ・試験時間がかかる 模型重心位置 できる ・実艇に会わさなくてもよい ・実艇にあわす ・模型製作が難しい 釣合帆走状態 ・試験後、解析で求める ・実艇の釣合帆走状態そのものが水槽で ・試験状態は帆走状態ではない データの汎用性 ・汎用性あり みられる ・部分の物理現象がつかみにくい ・設計へのフィードバックがやや難 (1)ヒール自由試験 ヒール自由試験装置の例を図 2.8 に、試験の様子を図 2.1,図 2.9 に示す。ヒール自由試験は 自由帆走試験(Free Sailing Test)とも呼ばれ、リーウェイ角のみを拘束(設定)し、セール 空力作用点に相当する点で模型を曳航する。模型に立てた曳航マストにトルクと軸力のセンサ を組み込み、曳航中、ヨーモーメントに相当するマストトルクがゼロになるように、マスト位 置を前後移動するか、 またはマスト位置を固定して舵を切るかのサーボ制御をかける。 さらに、 マスト軸力が常にゼロになるように上下方向にサーボ制御をかけて、ヒールによる上下移動に 追随させる。その結果、与えられた速度とリーウェイ角に対してヒール角が一つ定まり、帆走 状態そのものが水槽でシミュレートされる。 ヒール自由試験の短所は、模型の重心位置を実艇に合わせなければならないことと、船体の み(キール・舵なし)の試験ができないことである。キールの重量が排水量の約 80%を占める 実艇の重量バランスを模型で実現するのは非常に難しく、12m 級の 1/8 模型では、キール重量 29 を模型排水量(約 50kg)の 50%にするのが限界であった。そこで、模型の重心が高いことに よる復元力の不足分を補正するため、曳航マストにウェイトを付加して曳航点(ヒールフリー) を中心にヒール復元力を増す機構を考案し、ヒール自由試験を行った。 図 2.9 ヒール自由 LHT 図 2.8 ヒール自由試験装置の例 (ニッポンチャレンジ) (2)ヒール拘束試験 ヒー ル拘束試 験装置の概 念例を図 2.10、試験の模様を図 2.11、1997 年製 作したニッポンチャレンジの装置を図 2.12 に示す。 ヒール拘束試験では、電車に 6 分力計 を取り付け、その下に LHT 専用ガイド を介して模型を拘束する。専用ガイドは ピッチ(トリム)とヒーブ(シンケージ) を自由にして他の動きを拘束する装置で、 ヒール角の設定は前後のスィングガイド 図 2.10 ヒール拘束試験装置の例 [7] 機構の縦アーム下部にあるロール回転軸を固定して行う。リーウェイ角は6分力計全体を回し て設定する。設定されたリーウェイ角(β)とヒール角(φ)に対する抵抗(Fx) 、横力(Fy) 、 ヒールモーメント(Mx) 、ヨーモーメント(Mz)と、航走姿勢(トリム、シンケージ)を計測 する。 このヒール拘束試験装置では、曳航点がヒール固定軸になり、本来の曳航点である CE 点(セ ール空力作用点)より低く、URTと走行姿勢が異なるという問題がある。そのため走行前に 適量のウェイトを移動して初期トリム(船首下がり)をつけて、走行姿勢が CE 点を曳航した 場合と同じになるように工夫している。 模型製作の観点からみると、ヒール拘束法では模型のヒール角を拘束し、ヒール復元力を装 置全体で支えるので、模型の重心高さを実艇に合わせる必要がなく、模型の製作は容易で安価 30 にできる。ただし、装置の強度が必要になるので、 試験計画時に模型寸法や試験状態を検討する際、模 型のヒール復元力が使用する装置の許容負荷範囲内 に入るように、注意をしなければならない。 ヒール拘束試験では船体の性能に影響を与える物 理的な現象をとらえやすく、船体各部の変更の結果 や、艇体・キール・舵の流力特性を、リーウェイ角 (β)とヒール角(φ)の関数で表すことができ、 設計へのフィードバックが容易なので、通常の LHT はヒール拘束法で行っている。 図 2.11 ヒール拘束試験 (1997 年) AC 専用新 6 分力計 (97 年 7 月) 6 分力計 スウィングガイド スウィングガイド ピッチ・ヒーブ自由 ピッチ・ヒーブ自由 操舵器 舵力分離計測 ヒール拘束 AC 専用姿勢拘束装置 ヒール拘束 (97 年 7 月) 図 2.12 ニッポンチャレンジのヒール拘束試験装置 31 6 分力計 2.3 ヨットの水槽試験解析方法 2.3.1 水槽試験点 一般的な船舶の水槽試験では、直立状態(Upright)における抵抗試験を行うが、ヨットの場合 には、2.2.5 でも述べたように、風域や風に対する進行方向により大きく姿勢が変化するため、 直立直進抵抗試験(URT)に加え、リーウェイ、ヒール状態の試験(LHT)も行う必要がある。 URT は風下帆走、LHT は風上帆走状態に相当する。 試験点を決定する際に考慮するパラメータは、速度、ヒール角、リーウェイ角、ラダー角、 また、キールストラットにタブ(フラップ)が装着される場合には、タブ角と、非常に多くな る。すべてのケース、組み合わせを考えると、莫大な数の試験点となるため、試験前には、必 要な試験点がどこになるのかを入念に検討し、試験計画を立てる必要がある。 船体にキール、ラダーが付いた状態での水槽試験に加え、場合によっては、船体のみの試験 を行う。これは、船体のみの性能差を把握したい場合や、後述するモデル化において、船体と アペンデージを分離した形でのモデルを作成する場合などに必要となる。 まず URT では、想定される艇の速度を推定し、その速度の範囲で 10 点程度の試験を行う。 一般的には試験点間の間隔は 1 ノットで、特によく帆走する速度の付近は 0.5 ノット程度であ る。このとき、ヒール角、リーウェイ角、ラダー角、タブ角はすべて 0 度である。 LHT では、試験の目的、モデル化の方法などにより試験点が変わることになるが、一般的に は、風上帆走状態でよく帆走する速度 2~4 点、それぞれの速度においてヒール角 3~4 点を決 定し、それぞれの組み合わせで、リーウェイ角、ラダー角をそれぞれ 3 点程度変更する。タブ 角は別のタブ角最適試験などで決まった 1 点に固定するか、あるいは、2~3 点変更した試験を 追加する。2000 年のニッポンチャレンジでは、ヒール角を 4 点選び、それぞれのヒール角に なる時の実際の速度を推定し、ヒール角に対して速度を 1 点に固定した試験を行った。また、 モデル化でラダーを分離したモデルでない場合には、ラダー角を 1 点に固定する方法もある。 表 2.3 にニッポンチャレンジ 2000 で行った試験点の例を載せる。 表 2.3 ニッポンチャレンジで行った水槽試験点例 32 2.3.2 実験データ解析方法 ヨットの水槽試験での計測項目は、抵抗、横力、ヨ―モーメント、ピッチ角、ヒーブ量が一 般的である。 水槽試験は、 実際の大きさをスケールダウンした模型で試験をすることになるが、 このとき、水槽での模型の速度もスケールダウンし、小さくなる。したがって、計測される力 やモーメントなども小さくなる。それでは、模型での速度をどのように決め、力やモーメント をどのように実船スケールへスケールアップするのだろうか。 流体を支配する運動方程式はナビエ・ストークス方程式と呼ばれ、この方程式を解くと流体 の動きを把握することができる。この方程式をある代表速度と長さで無次元化を行うと、2つ の無次元数が現れ、これが流体の動きを決定しているとも言え、流れの性質が決まる。この 2 つの数は、レイノルズ数(Re)とフルード数(Fn)と呼ばれ、それぞれ式(2.1)のように定 義される。 Re VL 、 Fn V Lg (2.1) なお、V は速度、L は代表長さ、ν は動粘性係数、gは重力加速度である。 レイノルズ数は粘性力と慣性力の比を表しており、レイノルズ数が大きいほど流れが乱れ、 層流から乱流へ遷移する。また、フルード数は慣性力と重力の比を表しており、フルード数が 大きいほど水面が乱され波が発生する。先に述べたナビエ・ストークス方程式はこの2つの無 次元数で表現されるため、この2つの量が同じであれば、流体現象も同じとなる。この相似則 を利用することで、模型試験は実施される。 レイノルズ数の定義からわかるように、模型と実船とのレイノルズ数を合わせようとする場 合、同じ水を流体としていると、模型のスケール分だけ速度を大きくする必要があり、模型試 験でのそのような速い速度は既存の水槽試験設備では不可能である。また同時に、その速度で 模型のフルード数を計算すると、実船のフルード数よりも大きくなってしまう。すなわち、両 方の無次元数を合わせることは模型試験ではできないため、以上の理由により、フルード数を 合わせた速度設定とする(フルードの相似則) 。レイノルズ数は模型と実船とでは異なることに なる。 フルード数が同じということは、船の周りにできる波の様子は相似となり、無次元化された 造波抵抗は同じとなる。また、レイノルズ数が異なるということは、境界層が異なり、摩擦抵 抗が異なることになるため、何らかの修正をする必要がある。この方法が実船への力の換算方 法となる。先に述べた計測項目のうち、抵抗以外の力やモーメントなどは、この摩擦の影響は 小さいと考え、横力とヨ―モーメントは無次元化した値をそのまま実船で用いる。また、ピッ チ角はそのまま実船でも同じ角度となり、ヒーブ量はスケール分だけ模型の量にかけることで 修正する。 実船への換算方法には2次元外挿法と3次元外挿法の2種類があるが、3次元外挿法を用い るのが一般的である。ここでは3次元外挿法の場合について述べる。換算のために、計測され た抵抗は、波を作ることによる造波抵抗、そして粘性による相当平板摩擦抵抗と形状抵抗の3 成分に分離する。相当平板摩擦抵抗は、船体の表面積と同じ大きさの平板が同じレイノルズ数 の場合に受ける摩擦抵抗である。しかし、船体は3次元の形状であるため、平板という2次元 の形状とは異なる流れになるため、この修正として形状抵抗というものを追加している。一般 33 的に、船の全抵抗(Rt)は式(2.2)のように表される。 Rtm (1 K ) Rfm Rw (2.2) ここで、m は模型を表し、K は形状係数、Rfm は平板の摩擦抵抗、Rw は造波抵抗である。 この式を 1 V 2 S で無次元化したものは、式(2.3)のように表される。ρ は水の密度、V 2 は速度、S は浸水面積である。浸水面積は Upright 状態での値を用いるが、ヒールした場合に は浸水面積が大きく変化する場合もあるため、それぞれのヒール角での値を用いる。 Ctm (1 K )Cfm Cw (2.3) Cfm は平板の摩擦抵抗係数であり、レイノルズ数の関数としてシェンヘルや ITTC のテーブ ルを用いて求める。K の求め方は、小さい速度での試験を行い、造波抵抗は 0 と仮定すること で、 K Ctm Cfm 1 として求めることができる。 ここまでは模型スケールでの値であるが、ここから実船スケールへの換算を行う。まず造波 抵抗については、先に述べたように、フルード数を合わせた試験なので、Cw は同じ値となる。 粘性抵抗については、形状係数は同じとすると、実船スケールのレイノルズ数から Cfs をテー ブルより求め、(1 K )Cfs として求めることができる。s は実船を表す。結果として、式(2.4) として実船の全抵抗を求める。有次元にするためには、これに 1 V 2 S をかければよい。 2 Cts (1 K )Cfs Cw (2.4) 以上の粘性抵抗に関して、船体のみの試験の場合には、形状係数や摩擦抵抗係数は船体のみ について考えれば十分であるが、アペンデージ付きの船体の場合には、船体、キール、ラダー それぞれの摩擦抵抗を個別に考える必要がある。式(2.3)中の (1 K )Cfm は、式(2.5)のよ うになる。 (1 Kh )Cfmh (1 Kk )Cfmk (1 Kr )Cfmr (2.5 ) ここで、Kh、Kk、Kr はそれぞれ船体、キール、ラダーの形状係数であり、Cfmh、Cfmk、 Cfmr はそれぞれ船体、キール、ラダーの摩擦抵抗係数である。キールやラダーの形状係数は、 文献[15]や CFD などから求めることができる。 以上で実船における力やモーメント量が分かり、 艇の性能分析のためのデータベースとなる。 2.3.3 モデル化 得られた試験データをもとに、艇の性能を評価するわけだが、例えば 2 艇の異なるデザイン があった時に、Upright の状態で速度が 10 ノットの時、どちらの艇の抵抗が小さいかといっ た評価の場合には、 単純に抵抗値を比較することで評価することができるが、 風上帆走状態で、 風が 12 ノットのときにどちらが速いのかという評価の場合には、 実際のバランス状態を知り、 その時の抵抗がどうなるのかを知る必要がある。そのためにはバランス状態のヒール角、リー ウェイ角などを求め、試験データの補間が必要となり、簡単には評価することができない。こ 34 のため、得られた試験データを補間できる形にモデル化する必要が出てくる。すなわち、ヒー ル角やリーウェイ角などの艇の状態を与えれば、その時の抵抗や横力、ヨ―モーメントなどが 得られるモデルを作成する必要がある。モデル化には、様々な方法が考えられ、モデル化の考 え方によって必要な試験データも異なってくる。このため、試験前の試験点の検討には、モデ ル化の方法も含めた検討が必要になるということである。 ここでは、2つの方法を紹介する。1つは、2000 年のニッポンチャレンジで採用した方法で あり、もう1つは、様々なレース艇の模型試験を行ってきているイギリスの Wolfon Unit の採 用する方法である。以下それぞれの方法を NCAC 法、Wolfson 法と呼ぶ。 NCAC法 基本的な考え方は、アペンデージ付き船体についてのモデルを、船体、キール、ラダーのそ れぞれに分解し、それぞれに働く力やモーメントとしてモデルを作成するというものである。 モデル作成の方法は以下のような流れとなる。 ① 船体のみの水槽試験から船体のモデルを作成 ② 船体+キールの水槽試験から①のモデル分を差し引くことで、キールのモデルを作成 ③ 船体+キール+ラダーの水槽試験から①、②のモデル分を差し引くことで、ラダーの モデルを作成 船体の抵抗は、Upright の抵抗をベースに、ヒール、リーウェイによる抵抗の変化分を足す という形でモデル化される。これは式(2.6)のように表現される。なお、すべての値は 1 2 2 V S で無次元化したものでモデル化しており、試験結果から基本的に速度によらないと仮定してい る。 Crh Cru Crheel Crlwy (2.6) Crheel R1 2 R2 Crlwy R3 2 R4 ここで、Crh が船体抵抗、Cru が Upright 時の船体抵抗、ΔCrheel がヒール時の船体抵抗変 化分、ΔCrlwy がリーウェイ時の船体抵抗変化分、φ はヒール角、β はリーウェイ角、R1からR4 は試験データをこの形の関数に回帰分析して求められる係数である。 船体の横力及びヨ―モーメントは、Upright では 0 であるため、式(2.7) 、 (2.8)の形とし てモデル化される。 Cyh H 1 3 H 2 2 H 3 ( H 4 3 H 5 2 H 6 H 7 ) (2.7) Cmzh H 8 3 H 9 2 H 10 ( H 11 2 H 12 H 13 ) (2.8) ここで、Cyh は船体横力、Cmzh は船体ヨ―モーメント、H 1からH 13 は回帰分析係数である。 キールの抵抗、横力はそれぞれ式(2.9) 、 (2.10)にようにモデル化される。この横力の着力 点は、通常 1/4 コード長の位置に置かれ、ヨ―モーメントが計算される。 35 Crk ( K 1 2 K 2 K 3 ) EFSx (2.9) EFSx K 4 4 K 5 3 K 6 2 K 7 K 8 Cyk ( K 9 K 10 ) EFSy (2.10) EFSy K 11 4 K 12 3 K 13 2 K 14 K 15 K 9 f ( ) 、 K 10 f ( ) ここで、Crk はキール抵抗、EFSx、EFSy はヒールによる水面影響係数、Cyk はキール横力、 K 1から K 15 は回帰分析係数であり、 K 9 , K 10 はタブ角(α)の関数である。 ラダーの抵抗、横力はそれぞれ式(2.11) 、 (2.12)にようにモデル化される。着力点はキー ル同様に考える。 Crr (1 R1Cyr 2 )2CfrR2 R3 Cyr R4 /(ARr ) (2.11) R1 f ( ) 、 R2 f ( ) 、 R3 f ( ) 、 R4 f ( ) Cyr R5 ( R6 Cyk / ARk ) (2.12) R5 f ( ) 、 R6 f ( ) ここで、Crr はラダー抵抗、Cyr はラダー横力、Cfr はラダーの摩擦係数、ARr はラダーの アスペクト比、Ark はキールストラットのアスペクト比、 R1からR6 は回帰分析係数で、ヒー ル角の関数である。 Wolfson 法 基本的な考え方は、アペンデージ付き船体についてのモデルを、一体と考え、ヒール角やリ ーウェイ角が決まれば、全体の力、モーメントが決まるというものである。したがって、船体、 キール、ラダーそれぞれに働く力に分解することはできない。試験もすべてアペンデージ付き 船体で行う。 抵抗は、式(2.13)に表されるように、Upright 抵抗、ヒール抵抗、誘起抗力の 3 成分に分 解する。LHT での試験点は、ヒール角 4 点、それぞれのヒール角で速度 4 点を設定し、それぞ れの組み合わせで、リーウェイ角を 3 点程度変更する。基本的にはラダー角は固定する。この モデル化は、Wolfson の開発している VPP (WinDesign)と密接に連携しており、このためのモ デル化でもある。 Rtot Ru Rh Ri (2.13) ここで、Rtot は全抵抗、Ru は Upright 抵抗、Rh はヒール抵抗、Ri は誘起抗力である。 Ru は、Upright 時の抵抗カーブを 3 次スプライン関数でモデル化する。Rh は横力が 0 にな る時の抵抗から Ru を引いたものとなる。Ri は、横力が発生している時の抵抗から Ru+Rh を 引いたものとなる。横力はほとんどがキール、ラダーという揚力面から発生しているものであ 2 るため、Ri は横力の 2 乗に比例する特徴がある。このため、横力の 2 乗( SF )と抵抗のカーブ 36 は図 2.13 に表されるような形となる。また、場合によっては、この関係が線形でないことも あり、この場合には 3 点の値を定義し、2 次関数での補間をとる。 図 2.13 横力の2乗と抵抗との関係 線形関係にある場合には、揚力線理論での誘起抗力、揚力、翼のスパン長の関係を利用し、 有効スパン長を計算し、アペンデージ付き船体を翼とみなす考え方をする。この有効スパン長 (Teff )は式(2.14 )から計算される。 Teff 1 /( dRi V 2 ) 2 dFh (2.14) dFh SF / cos 以上から求められた 4 つのヒール角、4 つの速度における Rh と Teff の値を、速度とヒ ール角の関数として式(2.15)及び式(2.16)のような形で表現する。 Rh Ru ( Fdh K 1V K 2V 2 )( / 25) K3 (2.15) Ri ( ID1 ID2V ID3V 2 ID4 2 )( Fh / V ) 2 (2.16) ここで、 Fdh , K 1 , K 2 , ID1 , ID 2 , ID3 , ID 4 は回帰分析係数である。 以上の関係が分かれば、速度、ヒール角、横力より抵抗を求めることができる。Wolfson の VPP では、ヨ―モーメントのバランスが考慮されていないため、ヨ―モーメントのモデル化に ついては言及されていないが、必要な場合には、以上の速度とヒール角の組み合わせにおいて、 横力とヨ―モーメントの関係を関数で表せばよい。 2.4 ヨットデザインにおける水槽試験 2.4.1 デザインにおける位置づけ 水槽試験の目的は、何を見たいかによってさまざまであるが、基本的には性能の優れたデザ インを探すための手段である。ここでは、アペンデージ付き船体の水槽試験を前提に述べてい るが、他にも、船体やキールのみの試験を実施する場合もある。これは、余計な干渉を排除し、 単体の性能の優れたものを探し出すためであり、見たいものに焦点を当て、精度よく相対関係 を見るためのものである。ヨットの LHT 状態の試験では、抵抗に対して 10 倍程度の横力が発 37 生するため、セッティングの僅かな角度の違いで大きな抵抗の違いを生み出す可能性がある。 また、力を測定するロードセルも、力同士の干渉の問題があるために、精度に影響を与える。 このような理由から、単体の試験を行うことも必要である。もちろん、船体とキールの影響な ど、単体で優れていても、干渉により性能が落ちる可能性も否定はできない。 また、先に述べたように、VPP 用のモデルを作成するために水槽試験を行うことも大きな目 的である。水槽試験では、LHT 状態での力やモーメントを知ることはできるが、実際に帆走す る状態が分からないため、異なるデザインの優劣を水槽試験結果だけから直接評価することが できない。これを可能にするものが VPP である。VPP の詳細は後述されるが、水槽試験結果 から作成したモデルを基に、帆走状態の運動方程式を解くことでつり合いを求め、ヨットの姿 勢や艇速を求めるものである。 最近では CFD が更にデザインにおける重要なツールとなっており、アペンデージ付き船体 の CFD 計算も問題なく計算できるようになり、精度も格段に良くなってきている。これらの CFD 結果の確認、validation のためにも水槽試験が行われている。例として、2003 年のアメ リカズカップに向けて筆者が設計の中で行った CFD と水槽試験との比較を図 2.14 に示す。異 なる船型間の関係が CFD によって±0.3%の誤差内で抵抗性能を推定できていることが分かる。 水槽試験の誤差が 1%程度といわれていることを考慮すれば、かなり高い精度といえる。 以上のように、水槽試験のヨットデザインプロセスの中での役割は大きくさまざまだが、異 なるデザインの性能の評価、CFD による設計の水槽試験による確認、そして VPP のためのモ デル作成が大きな目的となっている。しかし、水槽試験は模型を製作し、結果が出るまでに最 低でも 1 カ月はかかり、時間とコストがかかる。また実船とのスケールの違いによる誤差も存 在する。一方、最近の CFD では、実船スケールでの CFD 計算ができるようになってきており、 精度、計算スピード、容量も 10 年前に比べれば格段に向上しており、今後更に CFD の精度が 改善されていくものと考えられるため、次第に水槽試験での役割が CFD の役割に移っていく ものと考えられる。 1.000 1.040 CFD 0.990 1.030 Tank Data 0.980 1.020 ) 0.970 D F C ( 0.960 o it ar 0.950 ga r 0.940 D 0.930 1.010 0.920 0.960 0.910 0.950 1.000 0.990 0.980 0.970 0.900 0.940 A B C D E F G H Model 図 2.14 アメリカズカップ艇の抵抗性能の CFD と水槽試験との比較 38 )k na T ( o it ar ga r D 2.4.2 日本における試験例 日本ではヨットの水槽試験例はあまり多くはないが、ニッポンチャレンジによる試験ではさ まざまなことがテストされた。船型設計のために、ニッポンチャレンジ 2000 では 1/7 の船体 のみの模型で試験が行われた。船型設計には CFD が多用され、約 200 隻のデザインが CFD で試され、その中から選ばれた 21 隻が 1/7 模型で試験された(図 2.15) 。また、アペンデージ 付き船体は 1/5 模型で 13 隻の船体がテストされた。また、バルブ形状を変更したテストやラ ダー位置を変更したテストなども行われた。キール単体の試験も実施され、1/2 模型でテスト された(図 2.16)。バルブ上では、層流と乱流が存在するレイノルズ数であるため、小さなス ケールの模型では実際の流れを再現することが難しく、できるだけ大きなスケールで実際のレ イノルズ数に近づけたテストを行いためである。 また、 レイノルズ数を合わせるという意味で、 セールの水槽試験も実施された(図 2.17)。一般的にはセールは風洞を用いて試験が行われる が、実際のレイノルズ数に合わせることが難しい。水を利用すればより小さな速度でレイノル ズ数を合わせることができるため、水槽での剛体セール模型が試験された。 図 2.15 ニッポンチャレンジで使用した 1/7 模型 図 2.16 1/2 スケールのキール模型試験 図 2.17 セールの水槽試験 39 ニッポンチャレンジ以外では、大学で研究レベルの水槽試験が行われ、ヨットの動的な帆走 状態の解明や、CFD の validation のために活用されている。実際のヨット建造につながる試 験は稀であるが、最近では ACT により、プロダクション艇として建造されている VITE31 や レース艇である GP33 のデザインのために水槽試験が活用された。GP33 は OneBox ルールと 言われるカテゴリーのレース艇であり、アメリカズカップと同様、範囲の規定された主要目内 で自由に形状を決めることができるもので、CFD や水槽試験を活用し、性能の優れた形状を設 計することが必要不可欠なものである。CFD 結果と実際のセーリング状態を図 2.18 に示した。 なお、これらの CFD 計算の詳細については第3章を参照されたい。また、ここでは触れなか ったが、実船でのデータを取得し、セーリング状態を解析し、設計へのフィードバックを行う プロセスも、水槽試験に対して実船試験として、非常に重要な作業である(詳しくは5.2章 参照)。このような取り組みは日本では稀であるが、海外では産業として水槽試験が確立して おり、デザインのために頻繁に活用されている。 図 2.18 GP33 レース艇の CFD 結果と実際の帆走状態 2.5 おわりに 造船水槽の紹介から始め、ヨットの水槽試験の特徴やヨット特有の試験方法から、水槽試験 における試験点の決め方や実船への換算方法を説明し、得られたデータからのモデル化の方法 を紹介した。 水槽試験のヨットデザインにおける大きな役割は、 異なるデザインの性能の評価、 CFD による設計の水槽試験による確認、そして VPP のためのモデル作成である。これらの技 術は、なかなか日本では活用する場が少なく、アメリカズカップへの挑戦がない今、次の日本 の再挑戦のために技術を継承していくためにも、できる限りヨットデザインに活用し続けてい くことが必要である。 参考文献 [1] 松井亨介:アメリカズカップへの挑戦―ニッポンチャレンジ・インサイド・レポート―水槽 試験、HELM、8 月-9 月号、1989. [2] Debord, F. W., Jr.: Review of the Current State-Of-The Art for Sailing Yacht Model Tests 40 and Future Challenges Facing Testing Facilities, Advances in Yacht Testing Technique, ITTC 87, Kobe, 1987. [3] Davidson, K. S. M.: Some Experimental Studies of the Sailing Yacht, Trans. SNAME, Vol.44, 1936. [4] Kirkman, K. L. and Pedrick, D. R.: Scale Effects in Yacht Hydrodynamic Testing, Trans. SNAME, 1974. [5] Kirkman, K. L.: The Evolving Role of the Towing Tank, 4th Chesapeake Sailing Yacht Symposium, SNAME, 1979. [6] Murdey, D. C.: Yacht Research at NRC, National Research Council of Canada, DME/NAE Quarterly Bulletin, No. 1973 (3). [7] Murdey, D. C., Molyneux, W. D. and Killing, S.: Techniques for Testing Sailing Yachts, Advances in Yacht Testing Technique, ITTC 87, Kobe, 1987. [8] van Oossanen, P.: The Development of the 12 Meter Class Yacht “Australia II,” 7th Chesapeake Sailing Yacht Symposium, SNAME, 1985. [9] 野本謙作、多田納久義、金田 隆:帆走の船舶流体力学的研究(第 1 報)、関西造船協会誌、 第 170 号、1978. [10] Tatano, H., Kaneda, T. and Kono, S.: Hydrodynamic Analysis on Sailing (2nd Report), Journal of the Kansai Society of Naval Architects, Japan, No.175, 1979. [11] Nomoto, K. and Tatano, H.: Balance of Helm of Sailing Yachts, 4th International HISWA Symposium on Yacht Design and Construction, Amsterdam, 1979. [12] 多田納久義、佐々木高幸、田中清隆:帆走の船舶流体力学的研究(第3報)、関西造船協会 誌、第 185 号、1982. [13] 多田納久義:帆走の船舶流体力学的研究(第5報)、関西造船協会誌、第 189 号、1983. [14] 多田納久義:帆走の船舶流体力学的研究(第6報)、関西造船協会誌、第 193 号、1984. [15] Hoerner, S. F.: Fluid dynamic drag, Hoerner, 1965. 41
© Copyright 2026 Paperzz