HAIシンポジウム2006
Human-Agent Interaction Simposium 2006
1C-2
ユーザの性格特性が人工物とのインタラクションに与える影響
-生体信号の個人差からインタラクションを評価する-
棟方 渚
小松 孝徳
櫻沢繁
塚原 保夫
松原 仁
公立はこだて未来大学大学院システム情報科学研究科
〒041-8655 北海道函館市亀田中野町 116-2
E-mail: {g3106012, komatsu, sakura, yasuo, matsubar}@fun.ac.jp
あらまし
本研究では,バイオフィードバック系を利用したゲームシステムにおける,ユーザとそのシステムとのインタラク
ションの状態を,被験者の SCR(Skin Conductance Response),SRL(Skin Resistance Level)の表出パターンや性格特性,内省報告に
よって評価した.システムとのインタラクションが持続していた被験者やインタラクションが発生しなかった被験者の SCR,
SRL の表出パターンと内省報告の個人差を調べると,同じグループ間でもインタラクションの状態に大きな違いがあることがわ
かった.
キーワード インタラクションの状態,SCR,SRL,性格特性,個人差
Effects of Users’ Personality Traits on their Interaction with Artifacts
-Evaluating Users’ Interaction by Individual Differences of their Biological Signals-
Nagisa MUNEKATA
Takanori KOMATSU
Yasuo TSUKAHARA and
Hitoshi MATSUBARA
Future University of HAKODATE 116-2 Kamedanakano-cho, Hakodate-city, Hokkaido, 041-8655 Japan
E-mail: {g3106012, komatsu, yasuo, matsubar}@fun.ac.jp
Abstract The final purpose of this study is to develop an interactive system that can realize a sustained man-machine
interaction that is a bilateral interaction in which human and artifacts affect each other. As a preliminary trail to tackle this
issue, we investigated the detailed interaction between the game system using a biofeedback and its users, and then their
interactions were evaluated by means of their biological signals (SCR: skin conductance response, SRL: skin resistance
level) and questionnaires (e.g., personality trait, self-contemplation).
Keyword sustained man-machine interaction,SCR,SRL,psychological questionnaires
1. は じ め に
間の慣れに対してどのように対応したらよいのか,ま
近年,私達の日常生活における様々なタスク達成を
た人間の期待を逸脱しないような適応方法などは,未
補助するために,様々な人工物の開発が進められてい
だ解決されていないといえる.よって未だに,人間と
る.それらのエージェントとしては,例えば,人間の
人工物との間には,持続的なインタラクションが構築
表出した言語やジェスチャーを認識することで,人間
されたとはいえない状態にあると考えられる.
の 意 思 を 理 解 す る シ ス テ ム [1],人 工 物 が 人 間 の 感 情 を
まず,人間が人工物とインタラクションを行う必然
理 解 す る よ う な イ ン タ フ ェ ー ス な ど が 挙 げ ら れ る [2].
性について考えてみる.例えば多くの場合,人間はあ
その一方,人工物を擬人化して認識することで,そ
るタスクの達成に対する支援を目的として人工物を使
の人工物に対して愛着をもつ人は少なくない.そのよ
用すると考えられる.その際,人間は人工物に対し所
うな人間の認知的な特性を利用して,人間が人工物に
望の動作の達成のみを期待するため,人工物は人間の
対して,人間相手のような社会的関係を築くことを狙
要求に対して効率的かつ合理的に処理する道具として
いとしたロボットの開発も進められている.例えば,
認識されているといえる.よってそのタスクが達成さ
KISMET[3], Robovie[4], WAKAMARU[5]な ど の パ ー ソ
れると,このような人間と人工物とのインタラクショ
ナルロボットの開発が代表的研究として挙げられる.
ンは,次のタスクを達成する必要性が表れるまで発生
それらは人間と長時間にわたってインタラクションを
しない.前述のようなパーソナルロボットと人間との
することを想定したパーソナルロボットであるが,人
インタラクションを考える場合,ロボットとインタラ
—1—
クションを開始する時の人間のモチベーションの度合
や感情に対する共感性を測定するための尺度である.
いによって,その後の人間の行動に大きな個人差を生
他者の心情を感じ取る能力を共感性といい,共感性の
む と 考 え ら れ る .こ の よ う な 個 人 差 を 把 握 す る こ と が ,
程度はユーザの対人態度に影響するとされている.
人間と人工物とのより円滑なインタラクションを構築
“ 感 情 的 暖 か さ ”,“ 感 情 的 冷 淡 さ ”,“ 感 情 的 被 影 響
する上で重要な要素であると考えられる.
性”の 3 つの下位尺度から成る.この尺度項目につい
そこで本研究では,人間と人工物とのインタラクシ
て 岸 本 [8]で 得 ら れ た 調 査 結 果 に 基 づ き ,“ 感 情 的 暖 か
ョンにおいて,人間の人工物への印象や内省の違いが
さ”因子が,さらに“感動しやすさ”と“同情”の 2
その後のインタラクションでの行動や持続にどのよう
因子に分かれ,合計 4 因子構造であることが確認され
な影響を与えるかを調査した.具体的には,人間とイ
た.本研究では,ここで確認された因子構造及びそれ
ンタラクションを行うシステムとして,びっくりクマ
を構成する質問項目を用い,ユーザの情動的共感性が
さ ん の ゲ ー ム [6]を 利 用 し た .そ の シ ス テ ム は 人 間 の 情
システムに与える影響について調べることとした.
動の指標として生体信号を用い,人間の生体信号の変
動を人工物が認識しそれに対応した振る舞いをするよ
うな一種のバイオフィードバック系である.また,生
3. イ ン タ ラ ク シ ョ ン 状 態 を 把 握 す る た め の
生体信号
体信号の表出パターンを解析し,そのパターンと心理
本研究では,人間と人工物とのインタラクションの
測定尺度や内省報告による人間の性格特性とを比較し
評 価 に SCR(Skin Conductance Response) と SRL(Skin
た.
Resistance Level)を 使 用 し た .そ れ ら の 皮 膚 電 気 活 動 は ,
手掌に装着した一対の電極間に微弱な電流を流し,見
2. ユ ー ザ の 性 格 特 性 を 把 握 す る た め の
かけ上の抵抗変化を調べる通電法で測定される.これ
心理測定尺度
らの相違点は,測定単位系のみにあり,どちらも通電
本研究ではユーザの性格特性を把握するための以
法 で あ る と い う 点 で は 同 じ で あ る が ,SCR は 一 過 性 の
下の 3 つの心理測定尺度を使用した.
反 応 (response)と し て , SRL は 緩 徐 な 変 動 (level)で 観 察
2.1. Big Five
さ れ る [10]. そ れ ら は 人 間 の 情 動 状 態 を 評 価 す る 方 法
1980 年 代 以 降 ,人 間 の 基 本 的 性 格 特 性 が 5 次 元 で 記
と し て 用 い ら れ て い る [11,12]. 刺 激 提 示 に 対 応 し て 生
述 で き る と す る BigFive 研 究 が 盛 ん に 行 わ れ て き た [7].
じ る SCR の 反 応 は 簡 単 に 同 定 す る こ と が で き る が ,外
性格特性論の立場では,人間は試行や感情,行動の背
来 刺 激 な し に 安 静 時 に も 出 現 す る 反 応 ( 自 発 性 SCR)
後にある一貫した反応傾向を内在化していると仮定し,
が あ る . 本 研 究 で 用 い た SRL と 同 じ 性 質 を 示 す SCL
個人がその特性をどの程度有しているかによって人間
が SCR よ り も 被 験 者 の 情 動 安 定 性 を 調 べ る の に 適 し
の 性 格 を 記 述 す る . BigFive 論 と は , 性 格 特 性 の 基 本
ており,被験者の精神的不安や安静状態の評価として
次元が,以下の 5 つに集約されるとする仮定である.
SRL を 用 い る こ と が 有 効 で あ る こ と が 示 さ れ た [13].
・ 情 動 不 安 定 性 (Neuroticism)
本 研 究 で は こ れ ら の 知 見 か ら ,SCR に よ っ て ゲ ー ム
・ 外 向 性 (Extraversion)
における被験者の一過性の情動表出を調べ,同時に
・ 開 放 性 (Openness to experience)
SRL に よ っ て ゲ ー ム 中 ま た は ゲ ー ム 後 の 安 静 時 に お け
・ 調 和 性 (Agreeableness)
る情動安定性を調べた.
・ 誠 実 性 (Conscientiousness)
3.1. SCR の評 価 方 法
本尺度は,形容詞尺度の利点を活かし性格特性の基
本 5 次 元 を 簡 便 に 測 定 で き る 計 60 項 目 の 尺 度 で あ る .
本研究ではこの尺度によりユーザの基本的な性格特性
を把握した.
2.2. 動 物 に対 する愛 着 尺 度
この尺度は,動物一般に対する愛着度を測定する尺
度である.計 6 項目から成り,5 段階リッカートスケ
ー ル で の 回 答 が 求 め ら れ る .こ の 尺 度 は ,岸 本 [8]に お
い て ,高 い 内 的 一 貫 性 が 確 認 さ れ て い る .本 研 究 で は ,
この尺度を使用し,動物に対する愛着がこのシステム
に対してどのような影響を与えるかを調べた.
2.3. 情 動 的 共 感 性 尺 度
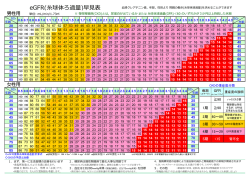
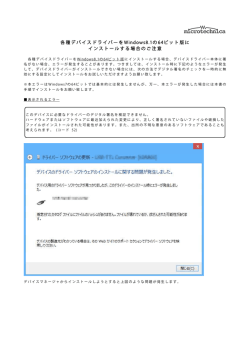
図 1
SCR の 変 動 量
高 木 [9]の 作 成 し た 情 動 的 共 感 性 尺 度 は ,他 者 の 情 動
—2—
本 実 験 で は SCR の 変 動 量 と し て ,先 行 研 究 [15]と 同
くようなシステムである.プレイヤには,片方の手掌
様 に 図 1 に 示 し た SCR の グ ラ フ の う ち 斜 線 部 分 の 面 積
に電極を装着し,膝の上に置いたロボットを抱えさせ
(SCR の 正 の 値 の 積 分 値 )を ゲ ー ム の プ レ イ 時 間 で 割 っ
た .こ こ で 使 用 し た SCR 測 定 装 置 は ,生 体 信 号 を 利 用
た も の を SCR 変 動 量 と し ,そ れ を 情 動 表 出 の 評 価 と し
し た ゲ ー ム [14]と 同 じ 測 定 器 を 使 用 し た . こ の ゲ ー ム
て 用 い た . つ ま り , SCR 変 動 量 が 大 き い 値 を 示 す と ,
のストーリーは,蜂の巣から蜂蜜を盗んだクマが,蜂
被 験 者 に 大 き な 情 動 の 変 化 が 生 じ た と 考 え ら れ ,ま た ,
蜜の入った壷をこっそりと家へ持ち帰るところから始
それらが小さければ情動の変化は小さかったと考えた.
ま る . 図 4 の PC デ ィ ス プ レ イ 上 の キ ャ ラ ク タ の ク マ
が蜂蜜を家へ持ち帰っている様子を眺めることがプレ
イヤのタスクである.プレイヤが落ち着いて見守るこ
3.2. SRL の評 価 方 法
とが出来れば,クマは無事に蜂蜜を手に入れることが
できる.しかし,プレイヤがなんらかの理由で興奮ま
た は 緊 張 を 感 じ SCR が 変 動 し た 場 合 ,図 5 の よ う に ク
マは驚いて蜂蜜を地面に落としてしまい,そこで蜂に
気付かれ,クマは蜂に刺されてしまう.
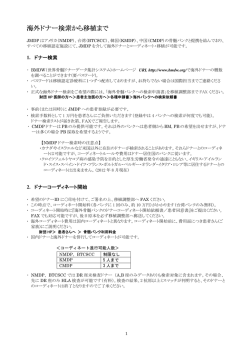
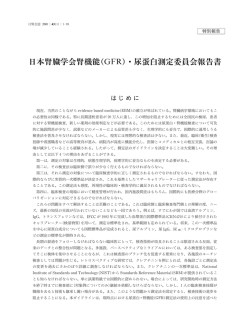
図 2
SRL の 変 動
本 実 験 で は ,SRL の 評 価 方 法 と し て SRL の グ ラ フ の
振 幅 に 注 目 し た .図 2 の グ ラ フ は SRL が 徐 々 に 変 動 す
る様子を示しており,振幅が大きいほど皮膚の抵抗値
は高く,小さいほど低い.各被験者について安静時の
図 4
ゲ ー ム 画 面 (安 静 時 )
振幅を基準とし,情動状態の変化や持続を評価した.
4. ロ ボ ッ ト を 用 い た “ び っ く り ク マ さ ん ” の
ゲーム
図 5
ゲ ー ム 画 面 (SCR 変 動 時 )
ロ ボ ッ ト の 動 作 と し て ,プ レ イ ヤ の SCR の 変 動 に 合
わせ両手を上下に動かすと共に,蜂に刺された時は震
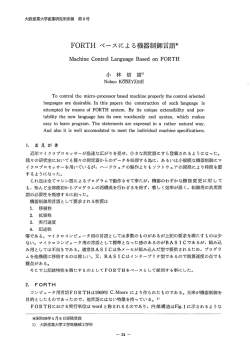
図 3
システム構成
本研究で用いたゲームのシステムを図 3 に示す.こ
の ゲ ー ム は ,ゲ ー ム 中 の プ レ イ ヤ の SCR を 観 測 し ,そ
えるなどして痛がるような振る舞いをさせた.3 回蜂
に刺されるとクマは気絶し,ゲームオーバーとなる.
ゲームの所要時間は最長で約 1 分とした.用いたロボ
ットとは,外観的親和性のあるイワヤ株式会社のテデ
の様子をリアルタイムにゲーム画面上のインジケータ
ィ ベ ア 型 の ロ ボ ッ ト IP ROBOT PHONE を 使 用 し た .
に 表 示 す る と 共 に ,SCR の 変 動 に 応 じ て ロ ボ ッ ト が 動
(片 腕 2 自 由 度 ×2, 首 2 自 由 度 , 計 6 自 由 度 )[15].
—3—
5. 実 験
ここでは,ユーザの性格特性の違いがインタラクシ
ョンへ与える影響を調べ,人間と人工物とのインタラ
クション状態やその持続について評価した.
5.1. 概 要
実験では,被験者に対し「びっくりクマさんのゲー
ム 」を 10 回 プ レ イ し て も ら い ,ゲ ー ム が 終 了 す る 毎 に ,
2 分程度の安静時測定を行った.また,このゲームに
おけるロボットの動きの影響を考え,ロボットを通常
通 り 使 用 し た ゲ ー ム を プ レ イ す る グ ル ー プ (ロ ボ ッ ト
の モ ー シ ョ ン 有 群 )と ,ロ ボ ッ ト が 動 か な い ゲ ー ム を プ
図 6
ゲ ー ム 時 の SCR の 変 動 量 が 大 き い グ ル ー プ
レ イ す る グ ル ー プ (ロ ボ ッ ト の モ ー シ ョ ン 無 群 )と に 被
験 者 を 分 け て 実 験 を 行 っ た .こ こ で は ,ゲ ー ム 中 の SCR
の 変 動 と ,休 憩 中 の 自 発 性 SCR の 変 動 を 調 べ ,ゲ ー ム
中 の 没 入 の 状 態 を 評 価 し た . ま た , SRL に よ る 情 動 の
安定性を調べ,インタラクション状態が持続されてい
るかどうかを評価した.これらの結果と,被験者の性
格特性と内省報告を比較し,被験者の性格特性による
インタラクションへ与える影響を調べた.
5.2. 手 順
全ての被験者には予め,ゲームのストーリーやシス
テムの仕組みなどの内容,実験の進め方等を説明し,
図 7
ゲ ー ム 時 の SCR の 変 動 量 が 少 な い グ ル ー プ
ロボットのモーション有,無群どちらも,ロボットを
膝の上に置き,ロボットを抱えるよう指示した.また
ゲ ー ム を 始 め る 前 に , 安 静 時 の SCR, SRL を 10 分 程
度測定した.その時被験者には,力を抜いてリラック
スするよう指示した.実験の所要時間は 1 人 1 時間程
度である.
5.3. 被 験 者
被験者は健康な大学生男女 9 人で,ロボットのモー
シ ョ ン 有 群 5 人 (男 性 3 人 , 女 性 2 人 )と , ロ ボ ッ ト の
モ ー シ ョ ン 無 群 4 人 (男 性 2 人 , 女 性 2 人 )と し た .
6. 結 果
6.1. SCR 表 出 パターン(情 動 表 出 の評 価 )
全 て の 被 験 者 9 人 の う ち ,ゲ ー ム 中 の SCR 変 動 量 が
そ の 後 の 安 静 時 に お け る SCR の 変 動 量 よ り も 大 き い
者 が 5 人 ,ゲ ー ム 中 の SCR の 変 動 量 が 極 端 に 少 な く 安
静 時 の 自 発 性 SCR の 変 動 量 の 方 が 大 き い 者 が 4 人 い た .
そ れ ら の SCR 表 出 パ タ ー ン の 典 型 的 な グ ラ フ を そ れ
ぞ れ 図 6,7 に 示 す .グ ラ フ 中 の 縦 線 は ,ゲ ー ム が 終 了
した時点を示し,その時点から左がゲームを試行して
い る 時 間 で ,右 が 安 静 時 測 定 を 行 っ て い る 時 間 で あ る .
通 常 ,安 静 時 の SCR の 変 動 は 個 人 差 が あ り ,自 発 性
SCR が 全 く 出 現 し な い か ,自 発 性 SCR を 伴 う か に 分 か
れ る .し か し ,ゲ ー ム 時 の SCR 変 動 量 が 極 端 に 少 な く ,
安 静 時 の SCR 変 動 量 の 方 が 大 き い グ ル ー プ に 関 し て
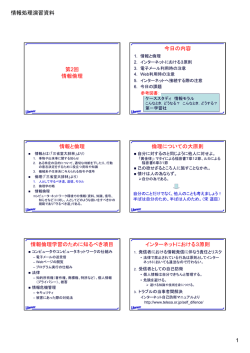
図 8
SRL 表 出 パ タ ー ン
は , 安 静 時 に 自 発 性 SCR の 出 現 が 起 こ っ た .
6.2. SCR 表 出 パターン(情 動 表 出 の評 価 )
全 て の 被 験 者 9 人 の SRL 表 出 パ タ ー ン を 調 べ た 結 果 ,
ゲ ー ム を し て い る に も 関 わ ら ず 安 静 時 の SRL の 値 と
ほぼ同等もしくはそれ以上の情動安定を示した被験者
が 4 人 ,ゲ ー ム 中 の SRL の 値 が 下 が っ て い た 情 動 不 安
定を示した被験者が 5 人いた.それらの典型的なグラ
フを図 8 に示す.
図 8 の グ ラ フ は 安 静 時 の SRL の 値 を 縦 軸 の 1 と し ,
そ の ゲ ー ム 毎 の SRL の 平 均 を 正 規 化 し た も の を 示 し
た.二つのグラフのうち点線で示した方は,情動が安
定している被験者で,実線で示した方は情動が安定し
なかった被験者のグラフである.
—4—
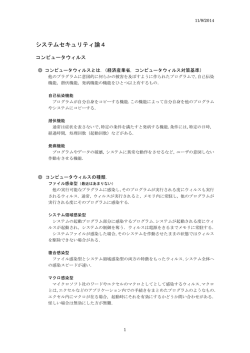
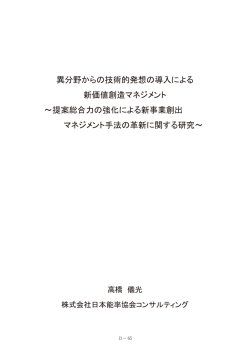
図 9
結 果 の ま と め (SCR と SRL の 表 出 パ タ ー ン , 心 理 測 定 尺 度 , 内 省 報 告 )
6.3. 被 験 者 の SCR,SRL の表 出 パターンと性 格 特
性 ,内 省 報 告 の結 果
ラクタに対する愛着が湧いたと答えていた.また,
BigFive の 結 果 に よ る と 外 向 性 が 高 い 傾 向 が , 一 般 動
全 て の 被 験 者 (① ~ ⑨ )に つ い て , こ の シ ス テ ム に 対
物愛着尺度でも高い値を示す傾向が確認され,そして
する印象やロボットやキャラクタに対する愛着の有無
内省報告からは,キャラクタをかわいいと感じた者や
を 質 問 し た .ま た SCR,SRL の 表 出 パ タ ー ン や 性 格 特
自分自身の生体信号に興味がある者等,様々な理由で
性,内省報告をまとめて図 9 に示した.
それぞれがゲームを楽しんでいることがわかった.一
① ~ ⑤ の 被 験 者 “ ゲ ー ム 時 SCR 大 ” が ゲ ー ム 時 の
方 ,“ ゲ ー ム 時 SCR 小 ” の 被 験 者 は , 全 員 が シ ス テ ム
SCR の 変 動 量 が 大 き い グ ル ー プ で ,⑥ ~ ⑨ の 被 験 者“ ゲ
に対して負の印象をもち,外向性が低い傾向があり,
ー ム 時 SCR 小 ” は ゲ ー ム 時 の SCR の 変 動 量 が 少 な い
ロボットやキャラクタに対する愛着が湧いた者はいな
グループとした.
かった.また,一般動物愛着尺度では低い値を示す傾
“システムに対する印象”については,ゲームが面
向があり,内省報告に注目すると,ロボットの動きや
白かったかどうかという質問に対し,被験者が正の印
キャラクタに対して違和感を覚えた,または自分の生
象 を 持 つ か ,負 の 印 象 を 持 つ か を 示 し た .(例:面 白 い
体信号に興味がないなど,それぞれが様々な理由でゲ
=正 , 面 白 く な い =負 ).
ームに積極的に参加することが出来なかったと考えら
“ロボットやキャラクタ”への愛着については,被
験者が,ゲーム画面上のキャラクタまたはロボットに
れた.
次 に , SRL の 表 出 パ タ ー ン に つ い て 注 目 す る と , 情
対 し て 愛 着 が 湧 い た 場 合「 有 」,湧 か な か っ た 場 合「 無 」
動 が 安 定 し て い る 被 験 者 (○ )は , 情 動 的 共 感 性 尺 度 で
とした.
は比較的冷淡であると示されている.したがって,こ
3 つの心理測定尺度のうち,
“ 一 般 動 物 愛 着 尺 度 ”は
のシステムでは,比較的冷淡と考えられた被験者は,
動 物 に 対 す る 愛 着 尺 度 の 数 値 (最 大 値 30)を そ の ま ま 記
ゲーム時においても,安静時と同様に情動が安定して
し た . ま た ,“ BigFive” と “ 情 動 的 共 感 性 尺 度 ” に つ
いることがわかった.
いては,特徴が表れた項目について記述した
(BigFive: 外 向 性 , 情 動 的 共 感 性 尺 度 : 冷 淡 ).
こ こ で , 注 目 す べ き 点 は , SRL 表 出 パ タ ー ン が ○ と
な っ た 被 験 者 の う ち 2 人 が“ ゲ ー ム 時 SCR 大 ”で ,内
“ SRL 表 出 パ タ ー ン ”に つ い て は ,安 静 時 の SRL の
省報告でもゲームを楽しんでいるということである.
値に近似またはそれ以上に情動が安定している被験者
つまり,安静時のようにリラックスしながらも.ゲー
を ○ で 示 し ,安 静 時 の SRL に 比 べ て ,情 動 が 安 定 し な
ム を 楽 し ん で い る と い う こ と で あ る .そ の 2 人 の う ち ,
かった被験者を●で示した.
「自分の生体信号をコントロールするのが楽しかっ
被験者の“内省報告”については,システムに対す
た」と答えた②の被験者については,ゲームの進行に
る内省を自由に,用紙や口頭で報告してもらい,それ
関わらず生体信号を意図的に変動させることを試みて
らから抜粋またはまとめたものを記述した.
いたと答えていた.また,もう 1 人の⑤の被験者の内
省 報 告 で は ,「 蜂 に 刺 さ れ る キ ャ ラ ク タ が か わ い か っ
7. 考 察
“ ゲ ー ム 時 SCR 大 ”の 被 験 者 は ,全 員 が シ ス テ ム に
対して正の印象をもち,5 人中 3 人がロボットやキャ
た」と答えており,ゲームにとって不利になる状況を
も楽しんでいたことがわかる.そのような結果につい
て考えると,どちらの被験者についても,ゲームの作
—5—
成 者 が 意 図 し た ,基 本 的 な ゲ ー ム の 楽 し み 方 (ク リ ア す
このような,生体信号や性格特性や内省報告の個人
る こ と を 目 的 と す る こ と )と 異 な り ,彼 ら な り の 楽 し み
差について考察することが,より持続的なインタラク
方をしていたと考えられた.その場合,ゲームにとっ
ションを実現させるために,重要な要素であると考え
て不利になるイベントを回避するといった緊張感が発
られる.また,将来的にはより情動的なエンタテイン
生 し な い た め ,情 動 が 安 定 し て い な が ら も ,SCR の 変
メントコンテンツの開発やロボットにユーザのインタ
動量が増大したのではないかと考えられる.この結果
ラクション状態を与えることで,より円滑なマンマシ
から,リラックスしながらゲームを楽しむことができ
ンインタフェースの実現などへも応用可能であると考
る状況があることがわかった.
えられる.
一 方 ,SRL 表 出 パ タ ー ン が ● と な っ た 2 人 の 被 験 者
について,情動が不安定であったにも関わらず,ゲー
ム 中 の SCR 変 動 量 が 少 な く (“ ゲ ー ム 時 SCR 小 ”),内
省報告でもゲームを楽しんでいないことがわかった.
それらの被験者のうち,⑥の被験者の内省報告では,
「ロボットの動きが気持ち悪かった」と答えており,
それについて詳しく質問すると,最初にテディベア型
ロボットを見たときはかわいいと感じ,ロボットの動
きに期待していたが,実際の動きと期待とのギャップ
が激しく,ゲームをしている時に気持ち悪いと感じて
しまったと答えていた.さらにこの被験者は実験が終
了するまでロボットに対する嫌悪感が持続していた.
そのような強い嫌悪感が,情動を不安定にしていたの
で は な い か と 考 え ら れ る . ま た ,も う 1 人 の ⑨ の 被 験
者については,内省報告で,単調なゲームに飽き,実
験に対し苛立ちを感じたと答えており,そのような苛
立ちが情動を不安定にさせていたと考えられる.それ
らの被験者について,情動が不安定であるのにも関わ
ら ず SCR が 変 動 し な か っ た 理 由 と し て は ,激 し い 嫌 悪
感や苛立ちが実験の間持続していたため,ある一定の
情動が持続しているという点で,一過性の反応である
SCR の 変 動 と し て 表 出 し な か っ た の で は な い か と 考 え
られた.
こ の よ う に ,シ ス テ ム に 対 す る 印 象 や SCR,SRL の
表出パターン,性格特性を調べることで,どのような
被験者が,ゲームの作成者が意図したゲームの楽しみ
方をすることができるのかといった傾向を把握するこ
とができた.しかし,ゲームの楽しみ方は,個人間で
大 き な 違 い が あ り , そ れ ら が SCR や SRL に 大 き な 影
響を与えることがわかった.
8. お わ り に
本 研 究 で は ,“ び っ く り ク マ さ ん ”の ゲ ー ム に お け る
イ ン タ ラ ク シ ョ ン の 持 続 性 を ,SCR と SRL の 表 出 パ タ
ーンと性格特性や内省報告によって評価した.ゲーム
中 の SCR の 変 動 量 が 大 き か っ た 被 験 者 は 全 員 ゲ ー ム
を楽しんでいる,つまりインタラクションを持続でき
た 傾 向 が あ り ,SRL の 表 出 パ タ ー ン と 内 省 報 告 に よ っ
て , そ れ ら の 持 続 の 方 法 (ゲ ー ム の 楽 し み 方 )に 大 き な
違いがあることがわかった.
文
献
[1] Bing-Hwang,J., Furui,S, Automatic recognition and
understandinf of spoken language-a first step toward
natural human-machine communication, Prof.IEEE,
88, pp.1142-1165, 2000.
[2] Cowie,R.,
Douglas-Cowie,E.,
Tsapatsoulis,N.,
Votsis,G.,
Kollias,S.,
Fellens,W.,
Taylor,J.G.,
Emotion recognition in human-computer interaction,
IEEE Signal Process. Mag., 18, pp.31-80, 2001.
[3] Breazeal,C., Valasquez,J., Toward Teaching a
Robot‘Infant' using Emotive Communication Acts, In
Proceedings of 1998 Simulation of Adaptive
Behavior, workshop on Socially Situated Intelligence,
pp.25-40, 1998.
[4] Ishiguro,H., Ono,T., Imai,M., Maeda,T., Kanda,T.,
Nakatsu,R., Robovie : an interactive humanoid robot,
International Jounal of Industrial Robot, Vol.28, No6,
pp.498-503, 2001.
[5] Wakamaru, www.mhi.co.jp/kobe/wakamaru/
[6] 棟 方 渚 , 吉 田 直 史 , 櫻 沢 繁 , 塚 原 保 夫 , 松 原 仁 , モ
ーションメディアを使用したバイオフィードバ
ックデザイン, 日本バーチャルリアリティ学会論
文 誌 , Vol.11, No.2, pp.275-282, 2006.
[7] 堀 洋 道 , 山 本 眞 理 子 , 心 理 測 定 尺 度 集 Ⅰ , サ イ エ
ン ス 社 , 2001.
[8] 岸 本 渉 , 「 あ な た は な ぜ 動 物 を 助 け る の で す か ? 」,
社会的効果理論と共感性からみる援助行動, 日本
グ ル ー プ ・ ダ イ ナ ミ ク ス 学 会 第 48 回 大 会 発 表 論
文 集 , pp126-127, 2000.
[9] 高 木 秀 明 , 情 動 的 共 感 性 と 援 助 行 動 の 関 係 に 関 す
る 研 究 , 日 本 教 育 心 理 学 会 第 18 回 総 会 発 表 論 文
集 , pp448-449, 1976.
[10] 山 崎 勝 男 , 藤 澤 清 , 柿 木 昇 治 , 宮 田 洋 , 新 生 理 心
理 学 3 巻 , 北 大 路 書 房 , 1998.
[11] 新 美 良 純 , 白 藤 美 隆 , 皮 膚 電 気 反 射 - 基 礎 と 応 用 ,
医 歯 薬 出 版 , 1969.
[12] 宮 田 洋 , 藤 澤 清 , 柿 木 昇 治 , 生 理 心 理 学 , 朝 倉 書
店 , 1985.
[13] 生 月 誠 , 原 野 広 太 郎 , 山 口 正 二 , バ イ オ フ ィ ー ド
バ ッ ク に お け る 情 動 安 定 性 の 指 標 と し て の SCL
の 検 討 , バ イ オ フ ィ ー ド バ ッ ク 研 究 , Vol.21 ,
pp29-36, 1994.
[14] Sakurazawa.S, Munekata.N, Naofumi.Y, Tsukahara.Y,
Matsubara.H, Entertainment Feature of the Computer
Game Using a Skin Conductance Response, ACM
SIGCHI International Conference on Advances in
Computer Entertainment Technology ACE 2004,
pp.181-186, 2004.
[15] 関 口 大 陸 , 稲 見 昌 彦 , 中 野 八 千 穂 , 中 野 殖 夫 , 舘
暲 , 「 IP ロ ボ ッ ト フ ォ ン 」の 製 品 化 ,日 本 ロ ボ ッ ト
学 会 誌 , Vol.23, No2, pp159-164, 2005.
—6—
© Copyright 2026 Paperzz