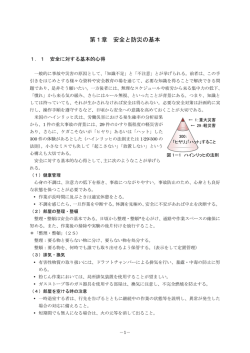
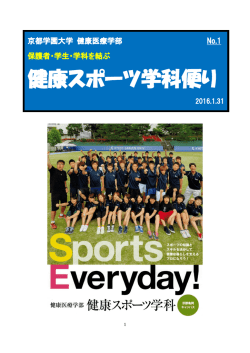
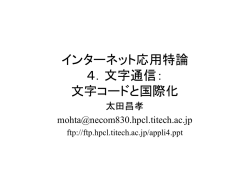
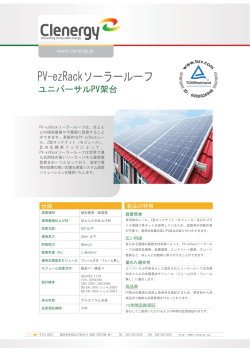
モジュール式 I/O システム デジタルインパルスインターフェース (リニア位置測定モジュール) 750-635 取扱い説明書 日本語版 Version1.3.0(2009.3.16) i Copyright © 2005 by WAGO Kontakttechnik GmbH All rights reserved. WAGO Kontakttechnik GmbH Hansastraße 27 D-32423 Minden Phone: +49 (0) 571/8 87 – 0 Fax: +49 (0) 571/8 87 – 1 69 E-Mail: [email protected] Web: http://www.wago.com テクニカルサポート Phone: +49 (0) 571/8 87 – 5 55 Fax: +49 (0) 571/8 87 – 4 30 E-Mail: [email protected] 本書の作成には万全を期しておりますが、お気づきの点やご意見がございましたら下記まで お知らせください。 〒136-0071 東京都江東区亀戸 1-5-7 日鐵 ND タワー ワゴジャパン株式会社 オートメーション TEL,03-5627-2059 FAX,03-5627-2055 この取扱い説明書において使用される会社名、ソフトウェアおよびハードウェアの名称は、 一般的に商標法または特許法により保護されています。 WAGO-I/O-SYSTEM 750 デジタルインパルスインターフェース 750-635 ii 目次 1 重要事項 .......................................................................... 1 1.1 1.1.1 1.1.2 1.1.3 1.3 1.3 1.4 2 法的原則 ....................................................................... 著作権 ..................................................................... 使用者の資格基準 ........................................................... 用途 ....................................................................... 図記号 ........................................................................ 記数法 ........................................................................ 適用範囲 ...................................................................... 1 1 1 1 2 2 2 I/O モジュール....................................................................... 3 2.1 特殊モジュール ................................................................. 3 2.1.1 750-635 [デジタルインパルスインターフェース] ................................. 3 2.1.1.1 概要 ..................................................................... 3 2.1.1.2 技術説明 ................................................................. 3 2.1.1.3 入出力ダイアグラム ....................................................... 4 2.1.1.4 LED 表示 ................................................................. 4 2.1.1.5 テクニカルデータ ......................................................... 5 2.1.1.6 機能説明 ................................................................. 6 2.1.1.6.1 P-インタフェースのブロックダイアグラム ................................. 6 2.1.1.6.2 I/O モジュールのブロックダイアグラム .................................... 6 2.1.1.6.3 センサ接続............................................................. 7 2.1.1.6.4 電源供給............................................................... 7 2.1.1.7 プロセスイメージ ......................................................... 7 2.1.1.7.2 ステータスバイトの構成 ................................................. 9 2.1.1.8 起動アプリケーション ..................................................... 9 2.1.1.8.1 伝播速度の設定......................................................... 9 2.1.1.8.3 エラー応答............................................................ 10 2.1.1.8.4 モジュールのイニシャライゼーション方法 ................................ 11 2.1.1.9 入出力データ構造 ........................................................ 12 2.1.1.9.1 CC-Link , PROFIBUS , Interbus , Modbus , DeviceNet , Ethernet ......... 12 2.1.1.9.2 CANopen ............................................................... 12 2.1.1.10 アプリケーション例 ....................................................... 13 1・重要事項 1 重要事項 本書が対象とするユニット類のインストールおよびスタートアップを迅速に行うために、以 下の情報と説明を十分に読んで理解し、その内容を順守してください。 1.1 法的原則 1.1.1 著作権 本書は図表を含めてすべて著作権で保護されています。本書に明記された著作権条項に抵触 する使用は禁じられています。複製、翻訳、電子的手段または複写による保存および修正を 行うには、ワゴコンタクトテクニック社(ドイツ)の同意書が必要です。これに違反した場 合、当社には損害賠償を請求する権利が生じます。 1.1.2 使用者の資格基準 本書で説明する製品は、PLC プログラミングの資格を有する技術者、電気機器の専門技術者、 または適用規格を熟知している電気機器の専門技術者の指導を受けた者が必ず操作してく ださい。不適切な作業による損害、または本書の内容を順守しないために発生したワゴ製品 および他社製品の損害について、ワゴコンタクトテクニック社(ドイツ)は一切の責任を負 いかねますのでご了承ください。 1.1.3 用途 使用されるコンポーネントは各用途に応じて、専用のハードウェアおよびソフトウェアコン フィグレーションで動作するようになっています。変更する場合は、必ず本書で記述された 範囲内で行ってください。ハードウェアやソフトウェアに対してそれ以外の変更を加えた場 合や、コンポーネントが規格に準じて使用されなかった場合は、ワゴコンタクトテクニック 社(ドイツ)の責任範囲外となりますのでご注意ください。改造版および/または新規のハ ードウェアまたはソフトウェアコンフィグレーションに関する要件については、ワゴジャパ ン株式会社まで直接お問い合わせください。 WAGO-I/O-SYSTEM 750 デジタルインパルスインターフェース 750-635 2・重要事項 1.3 図記号 危 険 傷害防止のため、指示内容を順守してください。 警 告 装置の損傷防止のため、指示内容を順守してください。 注 意 円滑な動作を確保するため、限界条件を必ず守ってください。 静電気(ESD) 静電放電によって損傷する恐れのあるコンポーネントを示します。コンポーネン トを扱う際には予防対策を行ってください。 メ モ 装置の効果的な使用およびソフトウェアの最適化のための手順やヒントです。 詳細情報 本書以外の文書、マニュアル、データシート、および Web サイトに関する参照 情報です。 1.3 1.4 記数法 記数法 例 備考 10 進 100 通常の表記法 16 進 0x64 C での表記法 2進 '100' '0110.0100' 「'」で囲む 4 ビットごとにドットで区切ります。 適用範囲 本マニュアルは WAGOI/O システム 750 における特殊モジュール 750-635(デジ タルインパルスインターフェース)の機能および取扱いを記述したものです。 取扱い、アセンブリ、スタートアップに関してはフィールドバスカプラ/コントロ ーラの取扱い説明書を併せて参照願います。 型 番 750-635 説 明 デジタルインパルスインターフェース 3・デジタルインパルスインターフェイス 2 I/O モジュール 2.1 特殊モジュール 2.1.1 750-635 [デジタルインパルスインターフェース] 磁歪式変位センサ用デジタルインパルスインターフェース 1ch 2.1.1.1 概要 図 1:750-635 2.1.1.2 技術説明 本デジタルインパルスインターフェースモジュールは、磁気感知式の距離測定センサと接続 できるように設計されています。信号ラインには RS422 インタフェースを使っていますの で高速、かつフェイルセーフ機能が保証されます。 磁気感知センサはスタートパルスを受信すると、RS422 インタフェースを通してそのパルス の応答信号をこのモジュールへ返します。センサの中では位置測定ポインタの磁石によって 発生したパルスが管の端に向かって伝播しますが、ポインタが移動後センサ電子回路によっ てストップ信号に変換されます。スタートパルス信号とストップパルスの間の時間を測定す ることにより、コントローラは 24 ビットの値で読むことができます。ここで測定時間はそ の距離に比例することになります。 インタフェースモジュールの動作開始時には、制御プログラムにおける距離測定センサの導 波管速度については、電源断の後の処理としてデジタルインパルスインターフェースのパラ メーター設定ができる様に考慮しなければなりません。制御プログラムによって、ゼロ点(始 点)とポインタ数の調節を行います。 このバスモジュールには電源接点が 2 ヶ所あります。従って、もし電源接点を通じてアース 接続が必要な場合は電源入力モジュールを用いることになります。 WAGO-I/O-SYSTEM 750 デジタルインパルスインターフェース 750-635 4・I/O モジュール デジタルインパルスインターフェ−ス 注 意 このモジュールにはグランド(アース)のジャンパ接点がありません。このモジ ュールの右隣の I/O モジュールへグランド(アース)を供給するには、電源入力 モジュールが必要になります。 このモジュールは 750-320,-323,-324,-327 以外の WAGO-I/O-SYSTEM のバスカプラ/コン トローラと共に動作することができます。 2.1.1.3 入出力ダイアグラム 図 2:750-635 の内部回路構成図 2.1.1.4 LED 表示 LED 名称 状態 機能 A 緑 動作表示 B 赤 エラー OFF ON OFF ON データ交換していない データ交換中 エラー無し 断線 センサからの応答(ACK)無し 導波管速度がセットされていない I/O モジュール・5 デジタルインパルスインターフェース 2.1.1.5 テクニカルデータ 型番 750-635 スタート/ストップ;初期化;電源(UV);グランド センサのハウジングを通じてシールド接続 センサ接続 1 入力数 45mA 消費電流(内部) 電源ジャンパ経由の電圧 DC24V (-15%∼+20%) RS422 データ伝送 信号出力 差動信号 RS422 信号入力 差動信号 RS422 データ長 1 x 24bit データ 1 x 8bit コントロール/ステータス 1μm 分解能 ヒステリシス 距離センサにより異なる 2ms 更新周期 センサストローク長 ≦ 4m ケーブル長 500m 500V (システム/電源間) 絶縁耐圧 0°C∼+55°C 動作温度範囲 ケージクランプ;0.08∼2.5mm2 電線接続 8-9mm 電線むき長さ 外形寸法(mm) W×H×L 重量 12×64*×100(*キャリアレールの上端から測定) 51g EMC CE 電磁障害-排除能力 EN 50082-2(96)に基づく EMC CE 電磁障害-放射 EN 50081-1(93)に基づく 承認 CULUS (UL508), CULUS (UL1604) Class I Div2 ABCD T4A, DENKO Ⅱ 3 G EEx nA Ⅱ T4, CE 詳細情報 承認に関する最新・詳細情報は下記 HP を参照願います。 http://www.wago.com/wagoweb/documentation/750/eng_dat/d010012e.pdf WAGO-I/O-SYSTEM の一般テクニカルデータは、各種フィールドバスカプラ/コントローラ のマニュアルに記載されております。 6・I/O モジュール デジタルインパルスインターフェ−ス 2.1.1.6 機能説明 2.1.1.6.1 P-インタフェースのブロックダイアグラム 図 3:P-インタフェースのブロックダイアグラム 2.1.1.6.2 I/O モジュールのブロックダイアグラム 以下のブロックダイアグラムは本 I/O モジュール内の機能を明らかにしたものです。周期的 なスタートパルスは ASIC によって起動され, センサからのストップパルスはポインタの数 に応じて処理されます。導波管のセンサ固有の速度は考慮されます。測定サイクルを開始し、 マルチプレクサからの測定データを読むのはマイクロコントローラによって行います。以下 のデジタルフィルターはノイズを減らすためのもので、ゼロ点設定ユニットは必要に応じて 相対的な位置の測定を可能にします。PLC とのデータ交換は、3 バイトのデータと 1 バイト のステータスまたは制御を含む RAM を経由して行います。 図 4:ブロックダイアグラム I/O モジュール・7 デジタルインパルスインターフェース センサ接続 2.1.1.6.3 入力 I+ I- 1 5 S+ 4 S- 8 +24V 0V 2,6 3,7 機能 INIT 信号 RS422,正電位 INIT 信号 RS422,負電位 スタート/ストップ信号 RS422, 正電位 スタート/ストップ信号 RS422, 負電位 距離センサ用 24V 電源 距離センサ用フレーム電位 表記したセンサ接続の他の方法として、ケーブルのシールド部分は WAGO-790 シリーズの シールドクランプサドル(取付け金具)によって固定することができます。 電源供給 2.1.1.6.4 このモジュールは電源ジャンパ接点を通して 24V(-15%∼+20%)の電源供給ができます。 距離センサの電源は、モジュールの 24V 端子から直接供給されます。電源供給はその他の条 件により制限される事もあるので注意をする必要があります。 メ モ 距離センサの精度はある程度電源電圧の安定性に依存するので、定電圧かつ高容 量の電源ユニットを使用してバスノードやフィールド機器に電源を供給してや るか、アクチュエータとセンサ間で電源供給を分けてやる必要があります。 2.1.1.7 プロセスイメージ この I/O モジュールは入力、出力の各プロセスイメージを各々4 バイトづつ持っています。 データの送信、受信用にはそれぞれ 3 バイトづつ(D0∼D2)が使用されます。変動データの 制御用に 1 バイトのコントロールバイト(C)および 1 バイトのステータスバイト(S)が用 いられます。 S D0 D1 D2 入力データ ステータスバイト プロセスデータバイト 0(LSB) プロセスデータバイト 1 プロセスデータバイト 2(MSB) C D0 D1 D2 出力データ ステータスバイト プロセスデータバイト 0(LSB) プロセスデータバイト 1 プロセスデータバイト 2(MSB) 8・I/O モジュール デジタルインパルスインターフェ−ス コントロールバイトの構成 2.1.1.7.1 説明 Bit7 は計測の際は常に’0’にします。 ”1”の場合はデータ読み取り不可です。 予備(常時”0”) ポインタ数(設定時)またはポインタ位置(Bit4 と組み合わせ) ポインタ数(設定時)またはポインタ位置(Bit5 と組み合わせ) ゼロ点を設定 導波管速度を設定 ポインタ数をセット パルスの立ち上がりエッジで、bit4 と bit5 にセットされたポインタの数がセットさ れます。 エラーリセット 1 にセットすると bit0 と bit6 のエラーフラグがリセットされます。(エッジトリガ ではありません) Bit 7 6 5 4 3 2 1 0 ポインタの設定と選択 本 I/O モジュールはセンサ側で 4 個までのポインタに対応でき、1 ポインタ以上の場合以下 の設定が可能です。 ・ ・ I/O モジュールのイニシャライゼーション中にポインタ数を設定 測定サイクルに応じてポインタ位置を選択 ポインタ数の設定(イニシャライゼーション) センサに搭載したポインタ数の設定は、イニシャライゼーション中にコントロールバイトの bit4 と bit5 を用いて PLC が処理する必要があります(上記および下記の表参照) 。ポインタ 数は bit1 がハイレベルになったとき RAM にストアされます。 ポインタ位置の選択(測定サイクル中) センサの動作中は、ポインタからの値を 4 個まで続けて計算することができます。特定のポ インタ位置を求めるためには、コントロールバイトの bit4 と bit5 をセットする必要がありま す。 ポインタ位置設定: Bit5 A1 0 0 1 1 Bit4 A0 0 1 0 1 ポインタ位置 1 2 3 4 注 意 通常の動作中はコントロールバイトの bit1 は 0 にしておかなければなりません。 I/O モジュール・9 デジタルインパルスインターフェース ステータスバイトの構成 2.1.1.7.2 Bit 7 6 5 4 3 2 1 0 説明 動作中は常に”0”。 エラー 0=エラーなし 1=エラー一般 −速度が設定されてない −ストップパルスの数と設定が一致しない −最大伝播速度超過 −タイムアウト:測定値なし、または測定値は無効 −伝播速度またはゼロ点設定時にエラー発生 −無効なポインタ番号指定。 センサ A1 センサ A0 ACK(ゼロ点設定) ACK(導波管速度設定) − ストップパルス異常 2.1.1.8 起動アプリケーション 2.1.1.8.1 伝播速度の設定 このモジュールの各アプリケーションは、各々の距離センサがそれぞれ異なった伝播速度で動 作する場合、各々に応じた特定の設定を必要とします。この速度はコントロールバイト及びバ スモジュール入力バイトのプロセスデータ通信によって設定されます。伝播速度は0.00から 3000.00m/sの範囲の十進値でセットされ、精度は0.01m/sとなります。この設定は電源断に対 処した安全値としてモジュールの動作記憶領域の中にストアし、電源断があった後はコントロ ーラから再ロードする必要があります(バスカプラの電源オフ、又はモジュールの切断)。デ フォルトの速度の設定は0.00m/sです。この状態はモジュールのエラーLEDおよびステータス バイトのbit6によって知らされます。 この速度はセンサ特有の値に出力バイトを設定し、コントロールバイトのbit2をセットするこ とで起動されます。速度設定が成功した応答はステータスバイトのbit2によって保証されます。 メ モ バスカプラの電源断があった後は、伝播速度の設定を元に戻すためにモジュールに よる対応したイニシャライゼーションによって保証すること。赤色エラー表示 LED とステータス bit6 の High 値は伝播速度がセットされていないことを知らせます。 10・I/O モジュール デジタルインパルスインターフェ−ス 2.1.1.8.2 ゼロ点の設定 ゼロ点(始点)の設定もまた、プロセスデータ通信によって可能になります。距離センサの絶 対測定値は、コントロールバイトのbit3の上向きエッジによってゼロ点レジスタに取り込まれ ます。ゼロ点の設定は電源断に対処した安全値としてモジュールの動作記憶領域の中にストア されます。速度設定成功の応答はステータスバイトのbit3のセットによって保証されます。 メ モ 内部ゼロ点保存場所の代わりとして、相対測定値の計算もまたコントローラのプロ グラムによって作成することができます。バスカプラのイニシャライゼーションが 電源断の後に保証されない場合、またはゼロ点設定の読み出しが不可能な場合はこ の方法をお薦め致します。また 2.1.1.8.4 章も参照ください。 2.1.1.8.3 エラー応答 エラーはステータスバイトの bit6 のセットで伝えられ、またエラーLED によって表示されま す。エラーは、エラー修正またはステータスバイトの bit0 をセット後、自動的に認識されま す。 I/O モジュール・11 デジタルインパルスインターフェース 2.1.1.8.4 モジュールのイニシャライゼーション方法 12・I/O モジュール デジタルインパルスインターフェ−ス 2.1.1.9 入出力データ構造 2.1.1.9.1 CC-Link , PROFIBUS , Interbus , Modbus , DeviceNet , Ethernet このモジュールはバスカプラ中に 1ch アナログ入力及び出力モジュールとして認識されます。 PROFIBUS ID は 0xB3 です(4 バイトデータに均一) 。 コントロール出力値: バイト順 説明 バイト 0(C) コントロールバイト バイト 1(D0) ゼロ点/スピード値−データバイト 0 バイト 2(D1) ゼロ点/スピード値−データバイト 1 バイト 3(D2) ゼロ点/スピード値−データバイト 2 ステータス入力値: バイト順 説明 バイト 0(S) ステータスバイト バイト 1(D0) 位置数値−データバイト 0 バイト 2(D1) 位置数値−データバイト 1 バイト 3(D2) 位置数値−データバイト 2 2.1.1.9.2 CANopen 4バイト入力データはインデックス2800内に置かれます。 入力データの構造: インデックス サブインデッ バイト 0 クス 2800 n ステータス バイト 1 バイト 2 バイト 3 D0(LSB) D1 D2(MSB) バイト 1 バイト 2 バイト 3 D0(LSB) D1 D2(MSB) 4バイト出力データはインデックス2900内に置かれます。 出力データの構造: インデックス サブインデッ バイト 0 クス 2900 n コントロール I/O モジュール・13 デジタルインパルスインターフェース 2.1.1.10 アプリケーション例 以下にスタート/ストップ信号インタフェース付き距離センサに対し、パラメータ設定した 場合の動作例を示します。 ここで、出力値は PLC から 750-635 へ書き込むデータ、入力値は 750-635 から PLC が読み 取るポインタの位置情報データです。 プロセスデータに入る測定値の単位はμm(マイクロメーター)です。 データフォーマットは PLC で用いられたフォーマット(PLC が 10 進値であれば decimal) が入ります。オフセットは測定前に設定することができます。 センサメーカーから提示された伝播速度が 2830m/s であれば、これに 100 を乗じて 16 進数 に変換します。28300 を 16 進数に変換すると 045178hex となり、出力データのバイト 1 3 にそれぞれ 04hex、51hex、78hex をセットします。 1 ポインタの例: ステータス バイト コントロール バイト hex dec hex dec hex(D2 D1 D0) dec hex(D2 D1 D0) dec 0x40 64 0x00 0 無視 無視 0x00 00 00 0 0x04 4 0x04 4 0x04 51 78 283000 0x00 0 0x00 0 無視 無視 ポインタ 1 位置 データ プロセス データ 1 プロセス データ 1 プロセス データ 1 出力値 入力値 注意 カプラー/内部バスの電源オン エラー:速度はセットされない 導波管速度設定 (2,830.00m/s に相当) ポインタ 1 1 行目:電源投入時 2 行目:伝播速度データをセットしてコントロールバイトの bit2 をセットします。完了する とステータスバイトの bit2 がセットされます。 3 行目:1 ポインタであるのでポインタ番号はセットしないでデータを読み取ります。 2 ポインタの例: ステータス バイト コントロール バイト hex dec hex dec hex(D2 D1 D0) dec hex(D2 D1 D0) dec 0x40 64 0x00 0 無視 無視 0x00 00 00 0 0x04 4 0x04 4 0x04 51 78 283000 0x00 0 0x12 18 無視 無視 0x00 0 0x00 0 無視 無視 0x10 16 0x10 16 無視 無視 プロセス データ 1 プロセス データ 1 プロセス データ 1 プロセス データ 2 プロセス データ 1 プロセス データ 1 プロセス データ 1 プロセス データ 2 出力値 入力値 注意 カプラー/内部バスの電源オン エラー:速度はセットされない 伝播速度設定 (2,830.00m/s に相当) ポンタ数の設定(2 ポインタ) ポインタ 1 の選択 プロセスデータ中のポインタ 1 ポインタ 2 の選択 プロセスデータ中のポインタ 2 1 行目:電源投入時 2 行目:伝播速度データをセットしてコントロールバイトの bit2 をセットします。完了する 14・I/O モジュール デジタルインパルスインターフェ−ス とステータスバイトの bit2 がセットされます。 3 行目:ポインタ数を 2 に設定するため、bit5 と bit1 をセットします。 4 行目:ポインタ番号を 0 にして位置データを読み取ります。 5 行目:ポインタ番号を 1 にして位置データを読み取ります。
© Copyright 2026 Paperzz