画像のフィルタリング処理
講義内容
実空間フィルタリング
平滑化(LPF)
エッジ強調(HPF)
Laplacian of Gaussian(LOG)フィルタ(BPF)
周波数空間フィルタリング
LPF,HPF,BPF
周波数選択的フィルタ
線形シフトインバリアントシステムと劣化画像復元
線形システム
劣化画像の復元
MATLABを用いたデモ
1
フーリエ面での処理
処理の流れ
処理の流れ
f ( x, y )
フーリエ変換
原画像
フーリエ
スペクトル F (u , v)
フーリエ逆変換
g ( x, y )
処理画像
フィルタ G (u , v)
= F (u , v) H (u , v)
演算
特徴
特徴 周波数成分に対する自在なフィルタリングが可能
例
例
LPF,BPF,HPF, 部分的なフィルタ
(特定周波数成分の除去,周期構造をもつノイズの除去)
Wiener フィルタ (周波数ごとのSN比を考慮した復元フィルタ)
2
コンボリューション定理
実空間
実空間
フーリエ空間
フーリエ空間
f ( x, y )
F (u , v)
h ( x, y )
H (u , v)
g ( x, y )
G (u , v)
g ( x, y ) = f ( x , y ) * h ( x , y )
コンボリューション
コンボリューション
g ( x, y ) = f ( x , y ) ⋅ h ( x, y )
積
積
G (u , v) = F (u , v) ⋅ H (u , v)
積
積
G (u , v) = F (u , v) * H (u , v)
コンボリューション
コンボリューション
3
4
処理の等価性
原画像
f(x,y)
Fourier Transform pair
コンボリュ Fourier Transform pair
ーション核
h(x,y)
処理画像
g(x,y)
Fourier Transform pair
フーリエ
スペクトル
F(u,v)
フィルタ
H(u,v)
フィルタ
演算
G(u,v)
5
平滑化フィルタ
空間周波数フィルタ
空間周波数フィルタ
実空間でのフィルタ
実空間でのフィルタ
(コンボリューション核)
(コンボリューション核)
u
v
1
1
× 1
9
1
1
1
1
1
1
1
(フィルタ特性の絶対値をとって表示)
6
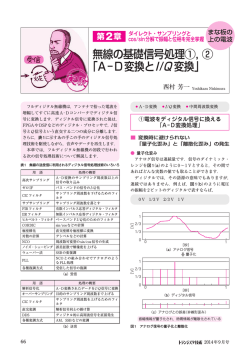
平滑化フィルタの周波数特性
Averaging filter
1
0.8
0.6
Modulation
0.4
0.2
0
-0.2
Width = 3
-0.4
0
10
20
Width = 5
30
40
Frequency
Low pass filter
Width = 7
50
60
70
間違い!
3,7が逆.
7
Laplacianフィルタ
空間周波数フィルタ
空間周波数フィルタ
実空間でのフィルタ
実空間でのフィルタ
(コンボリューション核)
(コンボリューション核)
u
v
0
−α 0
−α 4 −α
0
−α 0
α =1
8
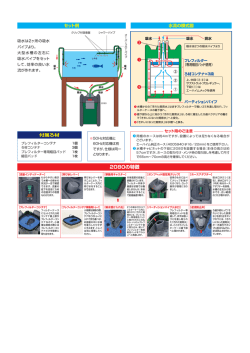
ラプラシアンフィルタの周波数特性
Laplacian filter
4
3.5
3
Modulation
2.5
2
alpha = 0.25
1.5
alpha = 0.5
1
0.5
alpha = 1
0
0
10
20
30
Frequency
40
High pass filter
50
60
9
Sobel フィルタ
空間周波数フィルタ
空間周波数フィルタ
実空間でのフィルタ
実空間でのフィルタ
(コンボリューション核)
(コンボリューション核)
x
y
-1 0
1
-2 0
2
-1 0
1
u
v
10
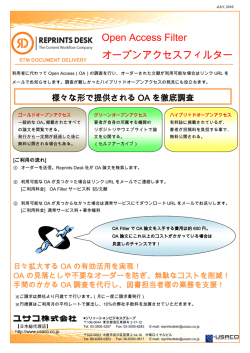
LOGフィルタの周波数特性
Laplacian of Gaussian filter
1
0.9
0.8
0.7
Modulation
0.6
0.5
0.4
0.3
sigma = 1
0.2
sigma = 2
sigma = 3
0.1
0
0
10
20
30
40
50
60
70
Frequency
Band pass filter
間違い!
Sigmaの並びが逆.
空間周波数フィルタとコンボリューション核の例
実空間
実空間
フーリエ空間
フーリエ空間
コンボリューション核
コンボリューション核
空間周波数フィルタ
空間周波数フィルタ
Sharp-cut
Sharp-cutLPF
LPF
11
12
周期性のあるノイズの低減
周波数空間の一部にノイ
ズのパワーが集中してい
るようなとき
g ( x, y )
オリジナル画像
重みw(x,y)は(x,y)の近
傍で推定画像の分散が
最小になるように決定.
Digital Image
Processing, R. C.
Gonzalez and R. E.
Woodsから引用
p ( x, y ) = ℑ−1{H (u , v)G (u , v)}
ノイズパターン
G (u , v)
スペクトル画像
fˆ ( x, y ) = g ( x, y ) − w( x, y ) p ( x, y )
処理画像
画像のフィルタリング処理
講義内容
実空間フィルタリング
平滑化(LPF)
エッジ強調(HPF)
Laplacian of Gaussian(LOG)フィルタ(BPF)
周波数空間フィルタリング
LPF,HPF,BPF
周波数選択的フィルタ
線形シフトインバリアントシステムと劣化画像復元
線形システム
劣化画像の復元
MATLABを用いたデモ
13
線形時不変システムまた線形シフトインバリアントシステム
δ (x)
In
0
x
Linear,
timeinvariant
system
ディラックのデルタ関数
:インパルス関数
14
h(x)
Out
0
x
デルタ関数入力に対する応答:
インパルス応答
入力信号
出力信号
g (x)
f (x)
x
τ
x
x
∞
出力信号は入力信号と g ( x ) = h( x − τ ) f (τ )dτ
インパルス応答との
−∞
コンボリューションで
= h( x ) * f ( x )
表される.
∫
x
15
シフトインバリアントシステム
シフトインバリアント:インパルス応答が,シフトによらないこと.
h( x − a )
h(x)
a
0
x
シフトインバリアント
h(x)
0
≠ h( x − a )
x
a
シフトバリアント
インパルス応答=点光源に対するレンズによる像
(点像分布関数point spread functionとよぶ)
物体面
像面
像面
レンズ
レンズ
2次元(画像)の場合
物体面
f ( x, y) = δ ( x, y)
g ( x , y ) = h( x , y )
シフトインバリアント
PSFが場所によって
異なる場合
シフトバリアント
16
線形システム
線形システム:重ね合わせの原理が成り立つこと
入力f ( x)に対して,g ( x)を出力する
システムを以下のように定義する.
g ( x) = S{ f ( x)}
このシステムが線形であるとは,
以下の関係が成り立つことである.
g ( x) = S{a1 f1 ( x) + a 2 f 2 ( x)}
= a1 S{ f1 ( x)} + a 2 S{ f 2 ( x)}
f0 f
2
f1
f (x)
入力信号
0
x
…
S{ f 0δ ( x)} = f 0 h( x)
S{ f1δ ( x − d )} = f1h( x − d )
S{ f 2δ ( x − 2d )} = f 2 h( x − 2d )
L
入力関数:
f ( x) = f 0δ ( x) + f1δ ( x − d ) + f 2δ ( x − 2d ) + L τ
出力関数:
x
g (x)
出力信号
g ( x ) = f 0 h( x ) + f1h( x − d ) + f 2 h( x − 2d ) + L
x
17
周波数空間で考える
F (u ) = ∫
∞
−∞
f ( x) exp(− j 2πux) dx
∞
G (u ) = ∫ g ( x) exp(− j 2πux)dx
=∫
−∞
[∫
∞
−∞
]
h( x − τ ) f (τ ) dτ exp(− j 2πux)dx
x
G ( u)
x
フーリエ空間
∞
g ( x) = ∫ h( x − τ ) f (τ )dτ
−∞
= h( x ) * f ( x )
コンボリューション
u
u
g (x)
G (u) output
=
F (u) Input :伝達関数 Transfer function
実空間
×
H ( u)
インパル h(x )
ス応答
= H (u ) F (u )
H ( u) =
x
∗
出力信号のスペクトル:
−∞
∞
F ( u)
f (x)
入力信号のスペクトル:
G ( u) = H ( u) F ( u)
掛け算
u
18
Wiener Filter
劣化画像の復元などに用いられる
理想画像: f ( x, y )
劣化の点像分布関数: h( x, y )
Inverse
Inversefilter:
filter:
1
H (u , v)
劣化画像:
g ( x, y ) = f ( x , y ) ∗ h ( x , y ) + n ( x , y )
G (u , v) = F (u , v) H (u , v) + N (u , v)
F (u )
H (u )
u
0
Wiener
Wienerfilter:
filter:
1
H (u , v) + PN (u , v) / PS (u , v)
ノイズパワー 信号パワー
×
u
u
0
u
© Copyright 2026 Paperzz