波線パターン投影による高速表面形状計測
糟谷 望†
阪下 和弘‡
佐川 立昌†
古川 亮††
川崎 洋‡‡
†独立行政法人 産業技術総合研究所 〒305-8569 茨城県つくば市梅園 1-1-1 つくば中央第 2
‡大阪大学 産業科学研究科〒567-0047 大阪府茨木市美穂ケ丘 8-1
††広島市立大学 情報科学研究科 〒731-3194 広島県広島市安佐南区大塚東 3-4-1
‡‡鹿児島大学 理工学研究科 〒890-0065 鹿児島県鹿児島市郡元 1-21-40
E-mail: †{nozomu.kasuya, ryusuke.sagawa}@aist.go.jp, ‡[email protected]
††[email protected], ‡‡[email protected]
1. は じ め に
物体の三次元形状の計測は,多様な分野での応用が
期待され研究が盛んに行われてきた分野の一つである.
形状を計測する.そのため,対応点をいかにして密に
精度よく獲得するかが計測の精度に直結する.
我々は単色の波線グリッドパターンを用いること
実際,その用途から接触式のものや非接触のものまで
で高精度・高密度な形状計測を実現する. 本手法は直
様々なものが製品化され実用されている.近年では,
線ではなく波線を用い,縦線と横線が交わる位相 を変
特に動物体の形状を計測できる手法に注目されている.
化させることで,交点付近の形状に特異性をもたせ,
そ の 筆 頭 と し て ,Microsoft 社 の Kinect[1]が あ げ ら れ る .
対応点探索に用いる.さらに,グリッドパターンを用
Kinect は , 人 体 の 形 状 を 実 時 間 で 計 測 ・ 解 析 す る こ と
いることで,その接続性を利用することで対応点探索
で,ユーザが身体動作用いて直感的な 操作が可能なゲ
の安定性の向上を図る.また,波線自体をぼかしてお
ームインタフェースである.ゲームインタフェースと
くことで,局所領域における画素単位のマッチングに
しての用途以外にも,安価で使用可能であることや
よって高密度の計測を可能にする.本手法では,高速
SDK が 用 意 さ れ て い る こ と な ど か ら ,ロ ボ ッ ト や 拡 張
度カメラを用いることで,非常に高速に動作する物体
現実の分野など,様々な分野で利用しようとする研究
の計測も可能である.また,投影するパターンが単色
が 進 め ら れ て い る . し か し , Kinect を は じ め と す る 現
であるため,マスクパターンを通すだけでパターンの
在利用可能な動物体の三次元形状を計測するセンサは,
投影が可能である.そのため,非常に小型な計測を装
静的なシーンを計測するセンサほど高精度・高密度な
置の作成も可能であり,内視鏡に応用することで,人
計測ができず,さらに多岐にわたる応用のために精
体内部の形状すら計測可能である.レーザー光を用い
度・密度の向上が望まれている.精度・密度が向上さ
ることで環境光の影響を削減し,屋外での計測も可能
れれば検査用途にも利用可能となる.
となると考えられる.
三次元形状を計測する方法は,非接触なものに限っ
本稿では,能動ステレオ法において単色の波線グリ
て も ,Time-of-Flight な ど の レ ー ザ ス キ ャ ン 方 式 や ,ス
ッドパターンを用いることで,物体の形状を高精度・
テレオカメラなどによる受動ステレオ法 ,プロジェク
高密度に計測する手法について解説する.さらに,本
タとカメラを用いた能動ステレオ法など,多数存在し
手法を用いた形状計測システムの例を紹介する.
ている.動物体の形状を計測するには, 1 回の観測で
2. 能 動 ス テ レ オ 法
全体の計測を行う必要がある.そのため,受動ステレ
能動ステレオ法による形状計測では,プロジェクタ
オ法や,単一の画像を投影する空間符号化方式の能動
から投影するパターンと,カメラで撮影された 画像で
ステレオ法が,動物体の計測に適しているとされ盛ん
対応をとり,対応のとれた点を用いて三角測量するこ
に 研 究 さ れ て い る [1]-[4]. 能 動 ス テ レ オ 法 は 受 動 ス テ
とでそのカメラからの距離を推定する.そのため,プ
レオ法に比べ,対象のテクスチャの影響が少な く,テ
ロジェクタ・カメラ間の対応をいかにして取得するか
クスチャのないような物体も形状計測が可能という利
が,能動ステレオ法の肝となる.その対応の取り方に
点があり,本手法では能動ステレオ法を用いる .
よって,能動ステレオ法は時間的符号化方式と空間的
能動ステレオ法とは,プロジェクタからパターン光
符 号 化 方 式 に 大 別 さ れ る [5].
を投影し,パターン光が投影された物体をカメラで撮
時間的符号化方式では,複数のパターンを順に投影
影することで,プロジェクタとカメラ間の対応を もと
し ,そ の 変 化 を 観 測 す る こ と で 対 応 付 け の 情 報 を 得 る .
に形状を計測する手法である.カメラで撮影された画
時系列の情報を用いることでピクセル単位での対応情
像中の投影パターンがプロジェクタから投影されたパ
報の埋め込みが可能であるが,刻一刻と状態の変化す
ターンのどの部分かを特定し,三角測量により物体の
る動物体の形状計測には不向きである と言える.
交点グラフを作成する.各ノードにおけるパターン光
における対応候補は,プロジェクタ・カメラの幾何関
係から限定できる.その候補点の中からもっともらし
い も の を 交 点 グ ラ フ の Belief Propagation(BP) [10]に よ
る最適化によって求める.ここまでで疎な対応関係が
得られる.最後に,カメラ画像中のノード間の局所領
域において画素単位の画像マッチングを行うことで密
な対応を取得し,密な三次元形状を獲得する.
(a)
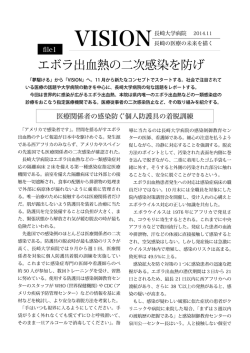
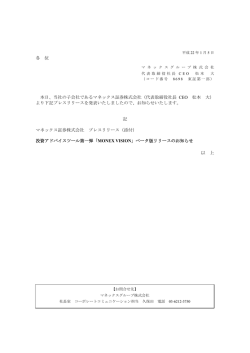
図 1
(b)
(a)波 線 グ リ ッ ド の 例 , (b)パ ラ メ ー タ .
( 𝑺 𝒙 , 𝑺 𝒚 は 隣 接 す る 波 線 の 間 隔 , 𝑾 𝒙 , 𝑾𝒚 は 波 線 の 波
長 , 𝐀𝒙 , 𝐀𝒚 は 波 線 の 振 幅 )
それに対し,空間符号化方式は単一のパターンで形
状計測を行うため,動物体の形状計測に適している.
しかし,単一のパターンに対応点情報を埋め込む必要
があり,計測密度が低下しがちである.この問題を解
決するため,複数の色を利用した方法が広く用いられ
て き た [3][5]-[7]が , 色 情 報 を 利 用 す る 場 合 に は , プ ロ
ジェクタの各色スペクトルの干渉や計測物体の反射特
性 の 影 響 か ら ,カ メ ラ 画 像 中 の 色 の 決 定 に 誤 差 が 生 じ ,
安定した形状計測にはいたっていない.他にも,特異
な 点 線 を 利 用 す る 手 法 [8]や ,二 次 元 的 な パ タ ー ン に 情
報 を 埋 め 込 む 手 法 [1][9]な ど が 提 案 さ れ て い る .し か し ,
精度・密度および安定性の全てにおいて十分な性能を
満たしていない.
提案手法は,単色のグリッドパターンを用いること
で,多色パターンの問題を解決し,グリッドパターン
の接続性を利用することで安定性が向上する.
3. 単 色 波 線 グ リ ッ ド を 用 い た 能 動 ス テ レ オ
4. 波 線 グ リ ッ ド に よ る 暗 黙 的 符 号 化
本稿では,プロジェクタが画像面から投影するパタ
ーンをプロジェクタ画像,カメラで撮影される画像を
カメラ画像と呼ぶ.
ステレオ法で三次元形状を計測するためには, 画像
間の対応を一意に取得する必要がある. 空間符号化方
式の能動ステレオ法では,一般的にパターン光に符号
化された情報をカメラ画像中から抽出することで 対応
点を得る.提案手法で用いる波線グリッドでは,一意
に対応が決まるパターンではなく,対応の優先順位に
関する情報を与えるパターンであり,グリッドの接続
性を利用してもっともらしいものを選択することで最
適な対応を取得する.
波線グリッドは図 1 に示すように,縦横それぞれ一
定 の 波 長 𝑊𝑥 , 𝑊𝑦 , 振 幅 A𝑥 , A𝑦 の 正 弦 波 を 𝑆𝑥 , 𝑆𝑦 の 間 隔 で グ
リッド状に並べることで生成する.プロジェクタ画像
中の交点位置,および交点周りの形状は, これらをパ
ラメータとして決定される.縦横の波線の間隔と波長
が互いに整数倍でない場合,交点位置の位相にずれが
生じ,交点周りの局所的パターンが周囲の交点とは異
なる形状を持つことになる.これを対応付けのための
特徴として用いる.この交点の形状は,波線の間隔と
提 案 手 法 で は , プ ロ ジ ェ ク タ か ら 図 1(a)に 示 す よ う
波長の最小公倍数の間隔で同一形状が現れることにな
な波線グリッドを計測対象物体に投影する.それをカ
る.しかし,プロジェクタとカメラの配置から対応点
メラで撮影し,撮影されたカメラ画像と投影パターン
はエピポーラ線と呼ばれる直線上にしか存在しないた
の対応点を取得し,三角測量することで形状の計測を
め,キャリブレーション誤差を含めてもその直線から
行う.投影パターンは正弦波形状の縦横の波線を格子
数ピクセル以内の交点に対応点を限定できる.
状に配置したものである.本稿ではこれは波線グリッ
ドと呼ぶ.プロジェクタから投影されるパターンはこ
の 1 パターンのみで,静的なものであるため,カメラ
とプロジェクタの同期も必要なく,高速度カメラを使
うことで高フレームレートでの形状計測も可能である.
また,単色のパターンであるため,マスクパターンの
後ろから単色光を照射するだけの単純な機構でもパタ
ーン光の投影を実現できる.
提案手法では,事前準備としてプロジェクタ・カメ
ラの内部パラメータおよびプロジェクタ・カメラ間の
外部パラメータをキャリブレーションにより求めてお
く.そして,物体にパターン光を投影し,カメラで撮
影した画像から線形状を検出し,交点をノードとした
5. 波 線 検 出 に よ る 交 点 グ ラ フ の 作 成
カ メ ラ 画 像 か ら の 線 検 出 に は Sagawa ら [3]が 提 案 し
た BP を 用 い た 手 法 を 用 い る . こ の 手 法 で は , 縦 横 そ
れ ぞ れ 別 々 に BP を 用 い た ピ ク セ ル 分 類 を 行 う こ と で
画像中の線を安定してサブピクセル精度で検出できる.
検 出 さ れ た 縦 横 の 線 か ら 交 点 を 算 出 し ,交 点 を ノ ー ド ,
波線をエッジとした交点グラフを作成する.ノード間
がエッジで結ばれていれば,それらのノードはプロジ
ェクタ画像上で同一の波線の上にあり,隣り合ってい
ることを示す.ただし,カメラ画像における線検出で
は,特に不連続な境界付近で誤判定を含むことが多く
なり,必ずしも信頼出来るとは言えない.そこで, エ
ネルギー最小化法を用いて尤もらしい対応を求めてい
くことで,信頼度の低い接続の除去と,カメラ画像中
の交点とプロジェクタ画像中の交点の最適な対応の取
得を同時に行う.
6. 交 点 グ ラ フ の エ ネ ル ギ ー 最 小 化 に よ る
最適な対応点の決定
交点グラフの各ノードの対応点は,プロジェクタと
カメラの幾何関係から対応候補点を絞り込むことがで
きる.キャリブレーション誤差や,画像歪みなどの影
響を考慮して,各ノードに対応するエピポーラ線 をプ
ロジェクタ画像に引いた際に,プロジェクタ画像上の
交点とその線が十分に近い場合に対応点候補の一つと
して選択する.ここで選択された対応点候補の中から
最 適 な も の を BP に よ っ て 決 定 す る .
BP の マ ッ チ ン グ パ ラ メ ー タ は 交 点 周 り の 形 状 を カ
メラ画像とプロジェクタ画像で比較したデータ項と,
ノードの接続性による正規化項の和として以下の式の
ように定義する.
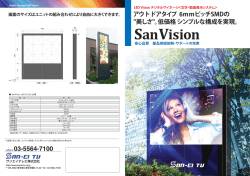
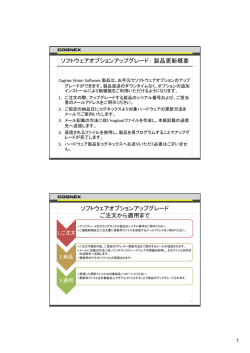
動 物 体 の 形 状 計 測 の 入 力( 左 )と 結 果( 右 )
化により,密な形状推定を行う.
投 影 す る 波 線 グ リ ッ ド は 図 1(a)に 示 す よ う に , 1 ピ
クセルの線ではなく,ガウス関数をかけておくことで
交点以外の画素にも情報をもたせ,局所的な画素値の
マッチングを行うことで密な対応を取得できる.
ま ず ,各 画 素 に お い て ,周 囲 の 交 点 の 情 報 を も と に ,
接平面のパラメータをガウス補間することで算出する.
𝐸(𝑇) = ∑ 𝐷𝑝 (𝑡𝑝 ) + ∑ 𝑊𝑝𝑞 (𝑡𝑝 , 𝑡𝑞 )
𝑝∈𝑉
図 2
(𝑝,𝑞)∈𝑈
(1)
こ こ で , 𝑝 ∈ 𝑉は 交 点 グ ラ フ の ノ ー ド , (𝑝, 𝑞) ∈ 𝑈は エ
補 間 に よ っ て 求 め た 接 平 面 の パ ラ メ ー タ を 𝑎𝑥 , 𝑏𝑥 , 𝑐𝑥 と
す る と , カ メ ラ 画 像 中 の 画 素 𝑥 = (𝑢, 𝑣)に お け る 深 度 𝑑𝑥
は以下の式で計算される.
ッ ジ , 𝑡𝑝 は ノ ー ド 𝑝の 対 応 点 候 補 の 一 つ で あ る . 𝐷𝑝 (𝑡𝑝 )
𝑑𝑥 =
が 𝑝 の 対 応 点 を 𝑡𝑝 に 割 り 当 て る 場 合 の デ ー タ 項 ,
𝑊𝑝𝑞 (𝑡𝑝 , 𝑡𝑞 )が エ ッ ジ (𝑝, 𝑞)に 対 す る 正 規 化 項 で あ る .
デ ー タ 項 𝐷𝑝 (𝑡𝑝 )は , 上 述 し た 交 点 周 り の 形 状 特 徴 の
類似度を用いることで,似ているものほど小さくよう
に設定する.具体的には,カメラ画像とプロジェクタ
画 像 の 交 点 周 り の SSD( Sum of Squared Difference)に
よって計算する.ただし,カメラ画像中の交点形状は
物体表面の形状の影響を受けて歪むこと があるため,
対象における交点周辺領域を,交点の接平面で近似し
たパッチでコストを計算する.この時,接平面の推定
は周辺の交点位置によって行う.
正 規 化 項 𝑊𝑝𝑞 (𝑡𝑝 , 𝑡𝑞 )は ,エ ッ ジ で 結 ば れ た ノ ー ド が 同
−1
𝑎𝑥 𝑢 + 𝑏𝑥 𝑣 + 𝑐𝑥
(2)
そして,このように求めた深度を変数として繰り返
し計算による画像マッチングによる最適化を行い,よ
り 適 切 な 深 度 を 計 算 す る .繰 り 返 し 計 算 の た め ,深 度 𝑑𝑥
の 微 小 変 位 𝛥𝑑𝑥 を 変 数 と し て 近 似 す る .最 適 化 で は ,カ
メ ラ 画 像 中 の 画 素 𝑥に お け る 輝 度 値 𝐼𝑐 (𝑥)と , 画 素 𝑥を プ
ロ ジ ェ ク タ 画 像 に 再 投 影 し た 画 素 𝑃(𝑥) の 輝 度 値
𝐼𝑝 (𝑃(𝑥))の 差 を 最 小 化 す る .た だ し ,隣 接 画 素 と の 深 度
差が大きくなり,形状に細かな凹凸ができないよう正
規化項を導入し,以下の式を用いる.
𝐸(∆𝐷) = ∑ (𝐼𝑐 (𝑥) − 𝐼𝑝 (𝑃𝐷+∆𝐷 (𝑥)))
2
𝑥
一線上にあり,隣り合っていることを示していること
+ 𝛾 ∑(∆𝑑𝑥 − ∆𝑑𝑥′ )2
か ら , ノ ー ド 𝑝と 𝑞に 隣 り 合 う 交 点 が 割 り 当 て ら れ た 際
(3)
𝑥,𝑥′
に 最 小 と な る よ う 設 定 す る . そ こ で , 𝑡𝑝 と 𝑡𝑞 が 同 一 波
こ こ で ,𝐷 + ∆𝐷を ,𝑑𝑥 + ∆𝑑𝑥 を 全 て の 標 本 画 素 に つ い て
線 上 に あ れ ば 0, そ れ 以 外 の 場 合 に は ユ ー ザ が 決 め た
集 め た ベ ク ト ル ,𝛾を 利 用 者 が 決 め る 正 規 化 パ ラ メ ー タ
定 数 λを と る . λを 大 き く す る と , カ メ ラ 画 像 中 の 線 検
とする.この最小化計算と再投影を,解の収束まで交
出結果によるノードの接続を大きく信頼し,逆に小さ
互に繰り返すことで,画素単位の深度 D を決定する.
い場合には接続性の依存度が下がりエッジを切断する
8. 動 物 体 の 形 状 計 測 実 験
ことが多くなる.
提案手法を用いて動物体の形状計測が可能である
(1)式 を BP に よ っ て 最 小 化 す る こ と で , エ ッ ジ で 結
こ と を 実 験 で 確 認 す る . 実 験 に は , 1024x1024 画 素 の
ばれているノードでエネルギーが伝播され,大域的な
カ メ ラ と ,1024x768 画 素 の プ ロ ジ ェ ク タ を 用 い る .投
最適解を取得できる.
影 パ タ ー ン は ,波 線 の 間 隔 が 縦 11,横 9 画 素 ,波 長 が
7. 画 素 単 位 の 最 適 化 に よ る 密 な 形 状 計 測
と も に 14 画 素 の パ タ ー ン を 用 い る .対 象 は 軟 式 テ ニ ス
上述した交点グラフの最適化により,波線グリッド
ボールを指で凹ませた際の形状の変化を観測したもの
の 交 点 に お け る 対 応 が 得 ら れ ,疎 な 形 状 を 計 測 で き る .
である.ボールが凹んでいる様子を計測できているの
次に,画素単位の補間と画像マッチングに基づく最適
がわかる.
で,安定した形状計測を実現し,さらに,交点以外の
画素において,補間と画像マッチングによって対応を
密 に 取 得 す る こ と で ,画 素 単 位 の 形 状 計 測 を 実 現 し た .
本 稿 で 示 し た ,顕 微 鏡 を 用 い た シ ス テ ム な ど の 他 に も ,
高速度カメラによる高速に変化する移動・変化する物
体の形状計測も可能である.
今後は,今回開発した計測手法について,マルチメ
ディア,医療,スポーツ,材料解析など,従来手法で
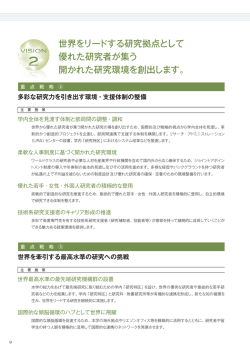
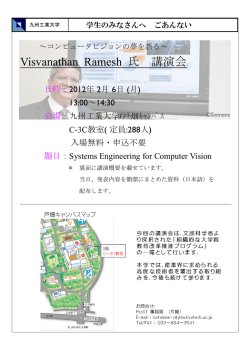
図 3
(a)顕 微 鏡 シ ス テ ム ,
(b)1 セ ン ト 硬 貨 に 投 影 さ れ た 波 線 グ リ ッ ド
は計測が十分に行われなかった分野への応用を進める
など,本手法の応用範囲を広げていく予定である. ま
た,カメラ・プロジェクタの台数を増やすことで全周
の形状計測へ拡大も目指す.
本 研 究 の 一 部 は , 総 務 省 SCOPE(101710002) お よ び
内 閣 府 NEXT プ ロ グ ラ ム (LR030) の 助 成 を 受 け て 実
施されたものである.
文
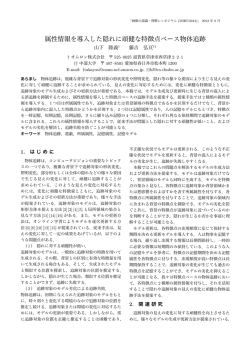
図4
顕微鏡システムによる形状計測結果
( 上 段 ) 撮 影 画 像 ,( 下 段 ) 復 元 し た 三 次 元 形 状
( 左 ) 1 セ ン ト 硬 貨 ,( 右 ) 指 先 ( 指 紋 )
9. 顕 微 鏡 へ の 応 用
提案手法は,固定した格子パターンの投影により形
状計測が可能である.その単純さにより,同様の手法
で 様 々 な 機 器 で の 適 応 が 可 能 で あ る .そ の 一 例 と し て ,
立体顕微鏡を用いた計測例を示す.構築した顕微鏡シ
ス テ ム を 図 3(a)に 示 す . 双 眼 の 顕 微 鏡 の 片 側 の 接 眼 レ
ンズにマスクパターンを設置し,後ろから光を当てる
ことで計測対象物体にパターン光を投影 する.もう一
方 の 接 眼 レ ン ズ か ら 覗 く と 図 3(b)の よ う に パ タ ー ン が
投影された物体が観測される.投影されたパターンの
間 隔 は 約 0.05mm で あ る . こ の シ ス テ ム を 用 い る こ と
で ,0.05~ 0.10mm と い っ た 非 常 に 細 か な 凹 凸 を も 計 測
可能である.図 4 に本システム利用して形状を計測し
た例として,1セント硬貨と指紋を計測したものを示
す.
10. お わ り に
本研究では,動物体の形状を高精度・高密度に計測
することを目的に,単色の波線グリッドを用いた三次
元形状計測手法を提案した.提案手法は 単一の静的パ
ターンをプロジェクタから投影するため,動物体の形
状計測も可能である.波線グリッドを用いることで,
波線の交点周りに局所的特徴を付与し,パターンの暗
黙的な符号化を行った.この局所特徴と,グリッドの
接 続 情 報 を Belief Propagation を 用 い て 最 適 化 す る こ と
献
[1] Microsoft, “Xbox 360 Kinect”,
http://www.xbox.com/en-US/kinect/
[2] H. Kawasaki, R. Furukawa, R. Sagawa, Y. Yagi:
“Dynamic scene shape reconstruction using a single
structured light pattern”, IEEE Conference on Computer Vision and Pattern Recognition (2008)
[3] R. Sagawa, Y. Ohta, Y. Yagi, R. Furukawa, N. Asada,
H. Kawasaki: “Dense 3d reconstruction method using
a single pattern for fast moving object”, IEEE 12th
International Conference on Computer Vision ,
pp1779-1786 (2009).
[4] A.O. Ulusoy, F. Calakli, G. Taubin : “One-shot scanning using de bruijn spaced grids”, IEEE 12th International Conference on Computer Vision Workshop
(ICCV Workshop), pp1786-1792 (.2009).
[5] J. Salvi, J. Batlle, E. Mouaddib: “A robust-coded
pattern projection for dynamic 3D scene measur ement”, Pattern Recognition Letters 19, pp1055 -1065
(1998).
[6] R. Sagawa, H.Kawasaki, R. Furukawa, S. Kiyota:
“Dense One-shot 3D Reconstruction by Detecting
Continuous Regions with Parallel Line Projection ”,
IEEE 13th International Conference on Computer Vision, pp.1911-1918 (2011)
[7] S. Zhang, P. Huang: “High-Resolution, Real-time 3D
Shape Acquisition”, Conference on Computer Vision
and Pattern Recognition Workshop (2004)
[8] M. Maruyama, S. Abe: “Range sensing by projecting
multiple slits with random cuts”, SPIE Vol.1194 Optics, Illumination, and Image Sensing for Machine Vision IV, pp.216-224 (1993)
[9] P. Vuylsteke, A. Oosterlinck: “Range image acquisition with a single binary-encoded light pattern”, IEEE
Transactions on Pattern Analysis and Machine Intelligence, pp.148-164 (1990).
[10] P. F. Felzenszwalb, D. P. Huttenlocher: “Efficient
Belief Propagation for Early Vision ”, International
Journal of Computer Vision, Vol.70, No.1, pp.41-54
(2006)
© Copyright 2026 Paperzz