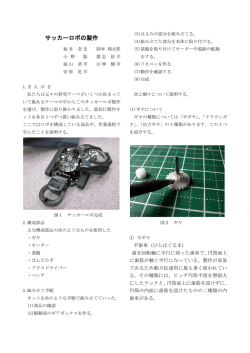
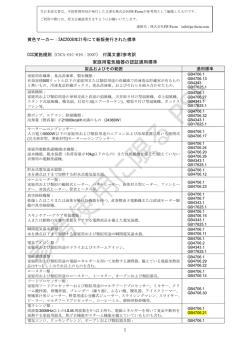
電動式バイブレータの瞬時動作制御の一手法 A Control Device for Instantaneous Actions of Electric Vibrators 趙華安 Hua-An ZHAO 藤井邦夫 池本友洋 柳原一博 Kunio FUJII Tomohiro IKEMOTO Kazuhiro YANAGIHARA 九州共立大学工学部電気工学科 Factory of Engineering, Kyushu Kyoritsu University, JAPAN まえがき 振動および振動技術は、幅広くいろいろな分野に 応用されている。特にノータッチで微小物などを指 定した場所まで移動したり附着物を落としたりする ロボットやオートラインに利用されている。振動の 起動と停止について厄介な慣性があり、制御しにく い所である。したがって、バイブレータ(振動発生 装置)の瞬時制御は重要な研究課題となっている。 本文は全電動式バイブレータを紹介する。この装置 は複数台モーターを使い、それぞれのモーターの軸 端に偏心ウェートを装着している。ウェートの開き 角度、回転方法及び回転数をベクトル制御プログラ マブルサーボインバータで制御することにより、振 幅の自由変換、電気的に連続に振動力・振動方式を 変化させることが可能である。本文は振動の瞬時制 御(起動と停止)ができるような3次元振動モード を作り出す一手法をレポートする。 1. 図3の振動の包絡線(envelope)からみると、振動 の起動や停止するには起動と停止時間αが必要であ り、この部分は制御しにくい区間でもある。本研究 は起動と停止時間αを減らすことを目的している。 そこで双モ ーターを使用 単モーターの 振動包絡線 することによ α り、w1とw2の挟 α 理想振動期間 角θとモータ 双モーターの ーの位置φを 振動包絡線 調節して実験 を行い、結果は 図3.理想振動のパターン 図4(a)と(b)に 示されている。曲線A、B、CとDはそれぞれφ=00、 300、600と900に対するものである。 (m/s2 ) 2.5 図4(a)位相角と振幅の加速度の関係(SRD) 2.0 全電動式バイブレータの構成 全電動式バイブレータの俯瞰図は図1に示され, 同じ型の2台のモーターを鉄板に固定し(振動体と なる)、モーターの相対位置は回転軸の挟角φにより 変換可能である。各モーターの軸端に偏心ウェート (weight)を装着している。本装置の特徴は,図2のよ うにウェートとウェートの挟角θ,回転方向及び回 転数をベクトル制御プログラマブルサーボインバー タで制御することができる。ウェートが高速で回転 されるとき、ウェートの重心が回転軸上にないから 遠心力が生じ、振動が発生する。 2. ウェート w1 振動体 1.0 0.5 θ(°) 0.0 -180 -150 -120 -90 -60 A 2 (m/s 1.4 ) -30 0 30 B 60 90 C 120 150 180 D 図4(b)位相角と振動の加速度との関係(ORD) 1.2 1.0 w2 の回転方向 w1 の回転方向 0.8 φ モーター モーター m2 m1 回 転 軸 ウェート w2 1.5 θ w2 0.6 挟角 w1 0.4 0.2 θ(°) モーター 0.0 -180 -150 -120 図1.バイブレータの俯瞰図 図2.バイブレータの側面図 この装置の運転モードは次の記号で表す。反回転 方式ORDφ (θ)(m1 とm2 の相対位置はφでw1 とw2 は 図2のように反対方向へ回転する方式)と同回転方式 SRDφ(θ)(w1とw2は同じ方向へ回転)である。 実験原理 電動式バイブレータは一般に1つのモーターでウ ェートの遠心力により単振動が起こせる。しかし、 3. -90 A -60 -30 0 B 30 60 90 C 120 150 180 D 実験結果 図4から分かるように、瞬時制御に最も良い効果 がもたらす運転モードは、起動するとき2つのモー ターを同時にSRD30(00)(ORD0(±1800))で起動し、 停止する場合は、ORD0(00)(SRD90(±1800))に変換 することであり、αを最大限に減らすことができる。 また、SRDの振動力はORDより倍に大きいと明らか に分かった。 4.
© Copyright 2026 Paperzz