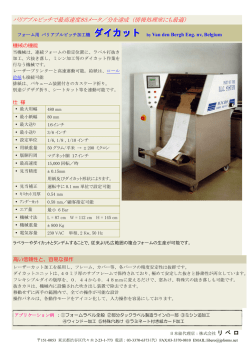
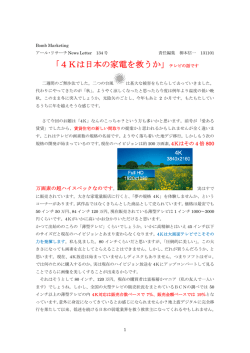
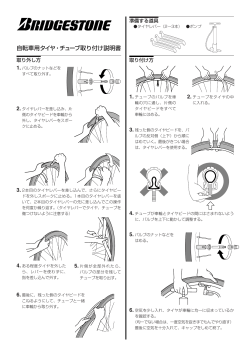
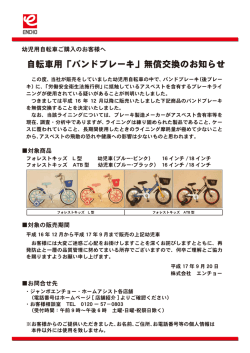
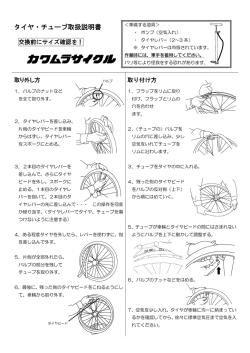
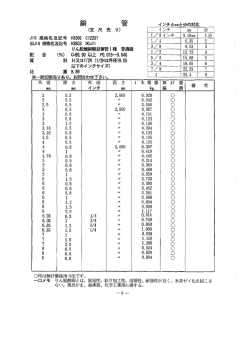
シグナル・インテグリティの基本 シグナル・コンサルティング社 ハワード・ジョンソン博士 2008年6月12日発行 概要 レクロイ社はシグナル・コンサルテ ィング社と協力して、「シグナル・イ 第1号 ステップ応答テスト 親愛なるジョンソン博士、 最近あなたがEDNに書かれた記事、「Eye Don't Like It」では、アイパターン測定は、とんでもない 診断ツールである、と指摘されています。アイパターン測定そのものは、最終システムが規格に対 してどのくらいのマージンがあるか(つまり規格を満足しているかどうか)を判断するには良いツー ルであるが、回路を診断するツールとしては、甚だ貧弱なツールでしかないということでした。私は ンテグリティの基本」というシリーズ このことに関しては納得しました。そして「ステップ応答テスト」がより良い診断ツールである、とあな 記事を8回にわたり発行していきま たは書かれていましたが、それをどのように使うのかに関しては全く説明がありませんでした。どう す。 やって「ステップ応答テスト」を行ったら良いのでしょう?またその結果をどのように解釈したら良い のでしょうか? 記事の著者は、シグナル・インテ グリティの世界では世界的な権威 ジョンソン博士の回答 である、ハワード・ジョンション博士 高速デジタル回路設計に興味を持っていただきありがとうございます。 で、高速信号のパフォーマンス向 上に関わる数々の問題を正確に 理解したいエンジニアの方々には 是非読んでいただきたい内容に なっています。 今後このシリーズでは、回路の診 ステップ応答テストは、デジタル通信用チャンネルの特性を測定するために用いられます。あなた がテストしたチャンネルの構成が詳しく分からないので、信号源側に高速信号発生用のドライバー 回路と、比較的長いデジタル通信チャンネル、(例えば基板上の伝送路や、バックプレーン、コネ クターなど)そして受信端にレシーバーがあり、終端が施されているであろうシステムと仮定して話 を進めます。 断結果が正しいかどうかを確認す る方法や、波形歪みの原因特定 私は今回、ナショナルセミコンダクタ社のDS25BR100 法、そして高速信号を測定するた ドライバーICを使ってチャンネルを構成してみました。 めに適切なデジタル・オシロスコ このドライバーICは信号のエッジの立ち上がり・立ち下 ープの帯域はどの程度か、などを がり時間が100psで、さらに送信波形にレベル調整可 紹介していく予定です。 能なプリエンファシスをかけることができます。今回の このシリーズを続けてお読みいた 実験では、プリエンファシスは使わないのでOFFにし だく為に、是非レクロイ社のWEB ておきます。 サイト、 http://www.lecroy.com/japan/ へお越し下さい。 翻訳者: デバッグ・ラボ 國頭 延行 氏 このドライバーICを使うに当たっては、専用のデモボード(DS25BR100EVK)を利用しました。 このデモボードには、ICの入出力端子に信号を出し入れするためのSMAコネクターが取 り付けられ、さらに波形観測の為のプロービングが容易な、比較的長さのあるマイクロス トリップラインが備えられています。図1に示したボードの出力側が、私たちがテストする チャンネルです。 http://debuglab.jp/ 図 1:回路の 3 カ所にプローブをあてる レクロイ社 ステップ応答テスト 1/4 このデモボードのレイアウトは以下の通りです。 ドライバーICの出力端子(TX+とTX-)の直近では、線 間のスペースが狭くて密結合した100Ω差動伝送路が 接続されています。この線間スペースは、ドライバーIC のパッケージのピン間隔によって決まってしまいます。 この密結合した差動伝送路は、0.5インチ(約1.27cm) の長さしかありません。差動伝送路のそれぞれの線路 は、この短い距離の後、線間が広くなり、2つの独立し た結合していない50Ωの伝送線路になります。差動ペ アを分離する理由は、そのほうが太い伝送線路にでき、 表皮効果によるロスを少なくすることが出来るからです。 分離された伝送路は1.7インチ(約4.32cm)の長さがあり、 信号出力用のSMAコネクターに接続されています。 信号出力コネクターには、50Ωの低損失セミリジッドケ ーブル(SCA type 52141)の一方をつなぎ、もう一方は LeCroy SDA 6020のチャンネル1と2にそれぞれ接続し ました。ケーブルの長さは24インチ(約60cm)です。 さらに、図1で示した箇所にLeCroy D600A-AT差動プ ローブを当てました。その時、マイクロストリップラインに はレジストがかかっていたので、プローブを当てる場所 だけ、レジストを引っ掻いてはがしました。 さあ、アイパターンを観測してみましょう(図2)。このアイ パターンは9ビット(512パターン)から形成されたもので す。データレートは2.5Gb/s(1UI = 400ps)です。 このアイパターンを見る限りにおいては、十分信頼でき るデータ伝送ができるように思われます。しかしこのドラ イバーICの実力からすると、私の期待とは裏腹な結果 が出たとしか言いようがありません。このドライバーICは 低ジッタを売り物にしているので、もっと良い結果が得 られるはずなのです。 レクロイ社 図 2:このアイパターンは、電圧軸のマージンの劣化とジッタの両方を示し ています。 回路のどこに問題があるのかを探るため、アイパターンを一つ 一つのパターンに分解し、それぞれのパターンを注意深く観測 するという方法があります。しかし最も便利な方法は、ステップ 波形を用いることです。ステップ波形をチャンネルに入力して得 られる結果を、そのチャンネルのステップ応答と呼びます。 もちろん、ステップ応答で正確な測定を行うためには、リアルタ イムで十分高速なサンプリング速度をもつデジタル・オシロスコ ープが不可欠です。私が使っているSDA 6020は、単発のサン プリング速度が20Gs/s(1サンプルあたり50ps)あります。このサ ンプリングスピードは確かに高速ですが、測定対象ICの立ち上 がり・立ち下がり時間が100psであり、私は5psの分解能が欲しい と思ったので、ランダム・インターリーブド・サンプリング(RIS)モ ードを使うことにしました。このモードでは、オシロスコープは、 入力信号を複数回サンプリングし、サンプリングするごとにサン プリングする点を時間方向に少しずつずらしてゆきます。RISモ ードは時間分解能が高く、単発でサンプリングするのに比べて、 より多くの波形情報を得ることができます。他のメーカーのオシ ロスコープでは、「ノン・リアルタイムモード」や「サンプリングオシ ロスコープモード」などと呼ばれているようです。 RISモードの欠点は、観測したい信号は繰り返し信号に限られる ことで、これはRISモードの動作原理上どうしようもないことです。 幸いなことに、今回のチャンネル測定では、私がテスト信号をど のようにもコントロールできるので、テスト信号を繰り返し信号と することは可能です。また繰り返し信号を使えば、アベレージン グ機能を用いて、テスト信号とは無関係のランダムノイズ成分を 減らすことができ、システム(チャンネル)のステップ応答をきれ いな状態に保つことができます。今回はアベレージ回数として 16回を使いました。 私の好きな繰り返しステップ信号は、デューティ比50%の単純な 方形波です。私はこの信号を、hp社(現アジレントテクノロジー 社)の古いHP8082Aパルス発生器で作りました。このパルス発 生器は、差動出力を持ち、振幅及び立ち上がり・立ち下がり時 間を可変することができます。 つまりこのパルス発生器は、どのようなロジックICファミリーとも互 換性を持った信号を発生させることができるのです。 ステップ応答テスト 2/4 もしあなたが方形波発生器を持っているなら、その発 生器の出力を調整してドライバーICに入力すれば、ド ライバーICが強制的に方形波パターンを作り出し、立 ち上がり・立ち下がり時間が同じでかつ出力インピーダ ンスも同じ信号を、チャンネルに送り込んでくれます。こ れは実際のシステムでも使われている技術です。 方形波発生器を所有していない、もしくは方形波発生 器の物理的大きさが大きくてテストしたいシステムへの 接続が困難な場合、データ送信器を以下に挙げるパタ ーンでプログラミングして繰り返し送信すれば、方形波 発生器と同様の機能を持たせることができます。 プログラミングパターンとは、 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1…(以下その繰り返し) です。 このパターンを発生する時、ハイレベル(1)とローレベ ル(0)の持続時間は、テストしたいシステムのステップ 応答を十分に引き出すことができる長さにしておく必要 があります。つまり、各パターンの立ち上がり・立ち上が り部分の直後から平坦で、かつその平坦な部分が十分 に持続するようになってから、次の立ち下がり・立ち上 がり部分に移行するようにしなくてはなりません。経験 上、テストしたいシステムチャンネルの3往復分の時間 をパターンのハイとローの時間として設定すれば、テス ト信号の平坦性は確保できるようです。 データ送信機をプログラミングしても、波形の周期が十 分に遅くならないで各パルスの幅が短い場合、テスト波 形の各エッジから先が十分に平坦性が確保されたステ ップ応答特性が得られるまで、データ送信機のクロック を徐々に下げてください。 一方、システムがACカップルの場合、システムに存在 するかもしれないDCブロックコンデンサ、トランス、又は ハイパスフィルタで波形の平坦性が損なわれないよう に、ハイとローの期間を短くするようにして下さい。 図3には2つの波形が示されていますが、両方とも差動 プローブで測定した波形です。青い波形を見ると、ある 特定のパターンの波形がこのチャンネルに入力される と、1UIの中心部分(波形の立ち上がりから約200ps)に 大きなISIが発生していることがわかります。 図 3:立ち上がりエッジの後に必ず下向きのへこみが見られます。 このような波形歪みの重ね合わせは、ジッタを引き起こします。 それは何故なのか?図4の2つの波形を見て下さい。青い波形 は、画面内のBの位置で単独の立ち下がり部分があります。こ れはBより前に長い期間ハイが続いた後に、Bの位置で信号が 「ロー」に一度だけ落ちています。 赤い波形は立ち上がり部Aが存在した後で、立ち下がり部Bが 生じています。 図 4:A 点から生じた下向きのへこみにより赤い波形の B 点を押し下げ、 立ち下がりエッジの B 点のタイミングを前にずらします。 単独で存在する立ち下がり部(青い波形)は、正しい位置で立 ち下がり部をB点で生じており、これ以前の波形の動きによって 生じた歪みの影響を受けていません。一方赤い波形の場合、 同じ立ち下がり部をB点で生じているものの、立ち上がり部Aに よって発生した下向きのへこみが、B点(つまり立ち上がり部Aか ら400ps後)に重畳しています。 下向きのへこみは、B点で立ち下がり部が時間的に少し早く落 ちるという現象を引き起こします。これがジッタとなって現れるの です。この現象は、図2に示したアイパターンでは見つけること は難しいでしょう。しかし、図2のアイパターン波形を注意深く観 測すると、波形のエッジの時間位置が、その一つ前にある逆極 性のビットの波形変化によって、時間的に少し早く変化するとい うことに気づくかもしれません。通常、波形のエッジの変化は、 一つ前のビットの影響を受けることは無いからです。 赤い波形はステップ応答波形です。ステップ応答のど の立ち上がり部分(赤い波形のA部)にも、その立ち上 がり部分から400ps後に下向きのへこみが存在していま す(赤い波形のB部)。このへこみは、パターンをこのチ ャンネルに通した時、次のビットがどのような値であれ 存在し、次のビットを表す波形にこのへこみが重なって 歪みとして存在することになるでしょう。 レクロイ社 ステップ応答テスト 3/4 私はステップ応答テストが好きです。なぜかと言うとそ れぞれのエッジと、そのエッジが引き起こす波形歪みと の関係が明確に分かるからです。 次に説明する事柄は、ステップ応答解析のもっとも面 白い所です。これまでのテストで、下向きのへこみが波 形に存在することが分かりました。そのへこみは、波形 のエッジから400psのところに存在しています。このよう なへこみを生じる理由はそれほど多くはありません。 (1)プローブを当てている位置から、ドライバーICの方 向にある200ps間隔で並んでいる2つの何らかの回路 要素からの反射。 (2)プローブを当てている位置から、コネクター方向に 200psのところにある一つの何らかの回路要素からの反 射。 (3)ドライバーICの不完全さ (4)プローブ、ケーブル、またはデジタル・オシロスコー プの不完全さ これらすべての可能性の中から、(3)と(4)は考えなくても 良いでしょう。何故なら、以前の実験でドライバーICは ちゃんと信号を出力していたし、デジタル・オシロスコー プで波形観測もできていました。立ち上がり・立ち下が りエッジも綺麗で、そこから400psに離れたところに、へ こみなど無かったからです。しかし、私はこれらの可能 性をリストアップだけはしておきたいと思います。あなた が実験を行う時に、この2つの事柄も事前の知識として 持っていて欲しいからです。 図3のステップ応答の結果を見直してみると、下向きのへこみの 中心の時間位置は400psよりもほんの少し後ろにあるようです。 この時間位置は、先ほど計算したプローブとコネクター間の反 射によって起きる往復時間と非常に近い値と言えます。 取りあえずの結論として、下向きのへこみはおそらくSMAコネク ターからの反射によって引き起こされたと考えられます。どうで す?簡単でしょ? へこみの時間位置の計算を行うだけで、波形の歪みをピンポイ ントで探すことができるようになるのですから。 次回は、 (A)この結論を検証するための実験を行う (B)この波形歪みがシステムに与える影響を調べる こととします。 それではまた。 ハワード・ジョンソン SDA6020を使って各種測定をさせていただいたレクロイ社に感 謝します。また、評価ボードを使わせていただいたナショナルセ ミコンダクタ社にも感謝します では、往復の距離が400psある二つの回路要素を探す ことにしましょう。 (1)に関して検討しましょう。プローブはドライバーから 0.87インチ(約2.1cm)の所に置かれています。マイクロ ストリップラインの遅延時間を1インチあたり160ps(1cm あたり約63ps)とすると、往復の時間は、 2x(0.87 インチ)x(160 ps/インチ)=278 ps となり、400psに対して程遠い値となりました。この結果 から、(1)は除外できます。 続いて(2)に関して検討しましょう。SMAコネクターはプ ローブの位置から1.43インチ(約3.6cm)先に存在しま す。ですので、プローブとコネクター間の往復の時間 は、 2X(1.43 インチ)X(160 ps/インチ)=457 ps となります。 レクロイ社 ステップ応答テスト 4/4
© Copyright 2026 Paperzz