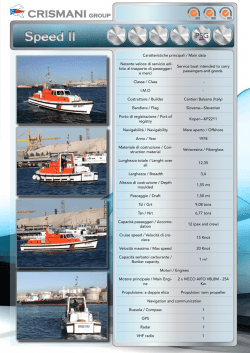
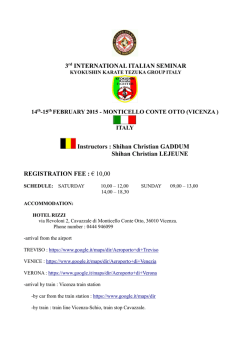
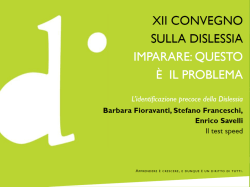
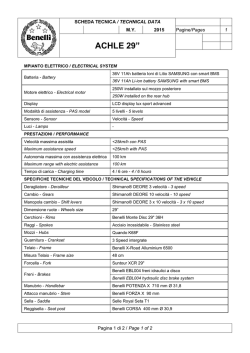
ATP/ATC subsystem testing and validation using a HIL test rig F. Addeo1, B. Allotta1, M. Malvezzi1, L. Pugi1, A. Tarasconi1 & M. Violani2 1 2 Department of Energetics “Sergio Stecco”, University of Florence, Italy UTMR Trenitalia S.p.A, Italy Abstract Automatic Train Protection (ATP) systems ensure that trains comply with speed restrictions and prevents them passing red signals. They are designed in order to automatically act to slow or stop the train where trains exceed speed limits or pass signals at danger. Their safety and reliability is then crucial for the safety and efficiency of the whole railway system. A correct estimation of distance to target and actual velocity is fundamental to evaluate residual braking resources, in terms of available deceleration, in order to reach the targets at the required speeds. The so-called odometry algorithm is the ATP subsystem devoted to train speed and travelled distance evaluation: it is composed by a series of sensors and a software procedure that acquires and manages the information from the sensors. Odometry estimation accuracy has a great influence on the whole ATP system behavior and then has to be carefully designed and verified. The validation of such devices could be performed with test runs, but this procedure has some disadvantages, for example, it is expensive and presents management difficulties (since these test activities have to be integrated with the normal rail traffic), testing conditions are not completely controllable etc. In order to overcome all these problems, Trenitalia S.p.A. and the Energetics Department of Florence University has designed and realized a HIL (Hardware In the Loop) test rig for the type approval of odometry devices. In this work the main features of the odometry device developed for the Italian ATP system (named SCMT) will be shown, the criteria used to design the tests will be resumed, then the architecture of the test rig will be presented. The final part of the work will summarize the results obtained from the testing activities and an estimation of the odometry subsystem performance (in terms of speed and travelled distance accuracy). Keywords: odometry, HIL simulation. Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 412 Computers in Railways IX 1 Introduction An Automatic Train Control system provides a high level of train safety by automatically guarding against the consequences of driver errors. Automatic Train Protection is a part of the so-called Automatic Train Control (ATC), a more complex system that includes ATP, ATO (Automatic Train Operation) and ATS (Automatic Train Supervision). This term is adopted to describe the architecture of the automatically operated railway. Typically an ATP system includes three components: • the wayside equipment, which generates codes to be transmitted to the train; • the track-to-train transmission system, which transmits information from the wayside equipment to the train; • the train on board equipment, which elaborates the information received from the track and from sensors mounted on the train and decides the actions to be performed. The track subsystem gives to the train a series of information, for instance: • the current position; • the distance to targets (point in correspondence of which speed restrictions have to be achieved); • the target speed (i.e. the speed that has not to be exceeded when the train passes through a target point). This information is communicated to the train with the aid of fixed balises or another kind of absolute information. Between two succeeding information acquisitions from the ground subsystem, the on-board subsystem continuously calculates the following data: • the minimum distance that allows to respect the speed restrictions at the next objective points: this value depends on the actual train speed, on the braking parameters and on the objective speed; • the distance to the next information points. If the difference between the distance to one or more of the next objective points and the distance that allows to respect the speed restriction is smaller than a fixed value, the on-board subsystem intervenes, for instance by activating the emergency braking. A correct estimate of distance to target and actual velocity is crucial to evaluate residual braking resources, in terms of available deceleration, in order to reach the targets at the required speeds. In order to perform this estimate, the ERTMS (European Railways Traffic Management System, the system under development for the European railways) will probably use a set of sensors including: two encoders positioned on two independent wheels, a radar sensor positioned on the first vehicle case, and a longitudinal accelerometer. Odometry techniques based on sensors located on one or more axles of the train may be used for dead reckoning between two subsequent exact position assessments. In this case the current speed is obtained from the measure of the Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 Computers in Railways IX 413 angular speeds of train wheels, while the distance estimation is calculated by integration of speed information. Dead reckoning by means of odometry may fail if degraded adhesion in the wheel-rail interaction occurs, due to rain, fog, ice, leaves, and so on, and the train is accelerating or braking, i.e. when pure rolling conditions between the wheel and the rail do not hold anymore, and macroscopic sliding occurs on one or more of the axles equipped with odometry sensors. The SCMT (Sistema di Controllo della Marcia dei Treni) is an ATP system that is being realized for the Italian railways. In this system the track subsystem, named SST, communicates its information to the train by means of fixed balises. In the SCMT system, the evaluation of the actual train speed and of the distance to the next objective points is obtained by elaborating the measures of two incremental encoders positioned on two independent axles. The SCMT system contains a module that estimates train speed and position from the data measured by the sensors. This module is named odometry system and includes a procedure (named “Odometry Algorithm”), that elaborates data from the track and from the sensors mounted on the train in order to estimate the current train speed and position, either when poor adhesion conditions between the wheel and the rail occur. The odometry system performance, in terms of accuracy of speed and distance estimation, may affect the whole ATP system performance, in particular: • if the odometry system tends to under-estimate the speed and the current position, the safety of the ATP system may be affected, since the train “thinks” to have a speed lower than the real one and/or to be at a distance from the objective greater than the real one, then a possible intervention of the control system could be delayed and the objective (for example stopping at a red signal) could be not respected; • on the other hand, if the odometry system tends to over-estimate the speed and the current position, the efficiency of the ATP system may be affected, in this case the train “thinks” to have a speed greater than the real one and/or to be at a distance from the objective shorter than the real one, then a possible intervention of the control system or could be not necessary or anticipated. For these reasons a particular care have to be put in the design and testing of such devices. The test of the odometry subsystems could be performed by a series of test runs, but this way is practically difficult for these reasons: • a great number of tests are necessary in order to properly validate device performances; • some testing conditions cannot be obtained during a run on the rail; • testing conditions are difficultly controllable and repeatable; • the testing activities have to be integrated with the normal rail traffic. Another testing strategy that effectively can overcome all these problems is represented by a proper HIL test rig [1]. In this paper, the testing activities conducted by means of the odometry test rig realized by Trenitalia S.p.A. [2] will be described. The main criteria used to Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 414 Computers in Railways IX design the tests that will be performed on the rig will then be resumed and some results will be shown in the final part of the paper. 2 Odometry HIL test rig description Figure 1: Block diagram of the test rig. Generally speaking, an HIL simulation consists of the reconstruction, around the component to be tested, of a hardware/software simulator able to reproduce the conditions that the component would meet in the real operative conditions. The HIL test rig developed for the validation of odometry devices has a software “core”: a numerical model that reproduces the longitudinal dynamics of a generic train. The model runs in real-time conditions and the operator can, by means of a graphic interface, interacts with the rig like the train driver, by accelerating and braking according to the test being simulated. The numerical model contains the traction and braking systems, including the model of antiskid and anti-slip devices, a wheel/rail contact model, the stiffness and damping properties of suspensions and so on. The model, from a series of input data (line properties, type of operation etc.) integrates dynamical equations of the system and calculates the velocities that the wheels should have in such operational conditions. These values are the reference inputs for the servo-motors that move the velocity sensors used by the odometric system. A hardware simulator of the relative motion between the locomotive body and the line was realized by means of a conveyor belt rig, which is also managed Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 Computers in Railways IX 415 by brushless servo-motors. The sensor that detects the vehicle translation, generally consisting of a Doppler-radar, can be installed on the conveyor belt rig. The odometry system subject to the testing activities acquires the measures from the sensor and, from them, calculates speed and current position estimation. The obtained values are then analysed in order to check: • the correspondence between the specification requirements and the system response; • the precision of the odometric estimation in terms of error on speed and position estimation. Figure 1 shows the block diagram of the test rig, while figure 2 shows two photos of the servo-actuators used to move the speed sensors. a) Figure 2: 3 b) The test rig: a) simulator of wheel dynamics, b) simulator of relative motion between line and locomotive. Criteria for the design of tests performed on the rig The tests used to validate the odometry system have to represent all the operative conditions that the system could meet during its activity. In order to define a proper set of test cases, an analysis of parameters that mainly influence odometric estimation performance is necessary. A first qualitative sensitivity analysis of odometry algorithm showed that the main parameters that affect system performances are: • train type and composition, • brake mode, • train length, Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 416 Computers in Railways IX • line gradient, • adhesion conditions. The coefficient used to specify the adhesion conditions is the static friction coefficient, imposed at the beginning of the test. During the test this coefficient can change, due to the time-history of the wheel slidings. Table 1: Parameters used to design the tests. Train type and composition Locomotive, empty freight train Locomotive, loaded freight train Locomotive, passenger train Coach, passenger train, traction applied to the end of the train Train length Minimum value (on the basis of braked weight percentage) Maximum value Intermediate value between the preceding ones Line gradient 0 ±9‰ ± 21 ‰ ± 35 ‰ Adhesion between the wheel and the rail µ 0.09 0.07 0.05 0.03 Type of operation A: Acceleration from 0 km/h up to 100 km/h with the maximum traction torque available (that depends on the adhesion value), three minutes at constant speed and emergency braking B: Emergency braking from a speed included in the range between the maximum speed and 20 km/h C: Maximum service braking from a speed included in the range between the maximum speed and 20 km/h D: Minimum service braking from a speed included in the range between the maximum speed and 20 km/h E: Acceleration from 0 up to the maximum speed with the 25, 50, and 75% of the available traction torque F: Maximum/minimum service braking from the maximum allowed speed up to 50% of the maximum speed, followed by an acceleration with the 25, 50, 75, 100 % of the available traction torque G: Acceleration with the 25, 50, 75, 100 % of the available traction torque followed by an emergency braking Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 Computers in Railways IX 417 For each parameter the main significative categories were identified, they are resumed in Table 1. By a combination of all these cases the set of tests necessary to completely analyse the algorithm behavior were defined. Once the tests have been realized, the results can be analysed in order to better understand which parameters have an effective influence on system performance and how these parameters affect the precision of the estimation. 4 Elaboration of test results From the experimental tests performed on the rig the following information will be available: • actual train speed (calculated by the software simulator); • actual train position; • wheel velocities; • speed and travelled distance evaluated by the odometry system. From these data the performance of odometry estimation can be evaluated in terms of precision in the speed and distance estimation. In particular, the error on speed estimation can be calculated, for each calculus sample, as follows: (1) ε v (i ) = v(i ) − vˆ(i ) , where v (i ) represents actual train speed measured at the time sample identified by the index i, vˆ(i ) is the corresponding speed calculated by the odometry system, and ε v (i ) is the error on speed estimation. The error on the travelled distance can be evaluated as the difference between the real position and the estimated one, as follows: (2) ε s (k ) = s (k ) − sˆ(k ) , where s (k ) represents actual train position measured at the in correspondence of the reference point identified by the index k, sˆ( k ) is the corresponding position calculated by the odometry system (for example by a numerical integration of the speed estimation) and ε s (k ) is the error on position estimation. In this case the evaluation of odometry error is not performed for each calculus sample, but in correspondence of fixed values of travelled distance (200, 500, and 1000 m). The results obtained from all the tests are then elaborated, in order to obtain the statistical distribution of odometry performance. Furthermore, the obtained results can be elaborated in order to better understand the behavior of the odometry system and to identify the main parameters that influence its performance. 5 Results In this section some results obtained from the tests will be briefly shown. The tests performed for the case A and B of type operation were available for this Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 418 Computers in Railways IX analysis. The data set of available tests used in this analysis was composed by 7170 cases. The first set of results, resumed in Figure 3, shows the dependence of odometry algorithm on the type of operation. Base distance 200 m 2500 2000 1500 1000 500 0 -250 -200 -150 -100 -50 0 Error [m] 50 100 150 200 a) Base distance 200 m, case A 1400 Base distance 200 m: case B 1200 1200 1000 1000 800 800 600 600 400 400 200 200 0 -250 -200 -150 b) Figure 3: -100 Error [m] -50 0 50 0 -100 -50 0 50 100 150 200 c) Classification of the results in terms of operation type. The first figure shows the results relative to all the performed tests. As it can be seen, the distribution has a mean value close to zero and almost all the tests are comprised in the range ± 20 m, but the curve has a non-perfectly symmetrical behavior. In particular, from this first qualitative analysis it appears that the algorithm tends to over-estimate the travelled distance. As discussed in the first part of the paper, an over-estimation of the distance does not influence the safety of the ATP system, but can decrease its efficiency. The obtained results were then analysed by subdividing them on the basis of operation type. The available tests were relative to cases A and B described in the Table 1. As it can be seen from Figure 3 b) and c), the type of operation has a significative effect on the odometry precision. In particular, the results relative to the case A (acceleration followed by a braking, Figure 3 b)) are characterized by greater (negative) errors. During the acceleration phase, since in many tests the adhesion between the wheel and the rail is very low, the axles tends to slip and then their tangential velocities is greater than the train speed. The odometry algorithm can only Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 Computers in Railways IX 419 partially compensate for this difference and an error in the estimation necessarily arises. Base distance 200 m, case B, µ = 0.03 250 Base distance 200 m, case B, µ = 0,05 300 200 250 200 150 150 100 100 50 50 0 -100 -50 0 50 Error [m] 100 150 0 -80 200 -60 -40 -20 a) 20 40 60 80 [m] b) Base distance 200 m, case B, µ = 0.07 250 0 Error Base distance 200 m, case B, µ = 0.09 350 300 200 250 150 200 150 100 100 50 50 0 -100 -80 -60 -40 -20 Error [m] c) Figure 4: 0 20 40 0 -100 -80 -60 -40 Error [m] -20 0 20 d) Classification of the results in terms of adhesion value. The second set of results (Figure 4) shows the dependence of the odometry error on the adhesion between the wheel and the rail. The presented results are relative to type B operations (emergency braking, see Table 1 for more details). As it can be seen, for low adhesion values the distribution is “wide”, i.e. it is characterized by a great dispersion, this means that in this case the error in the estimation can assume significative values. As the adhesion increases, the distribution tends to become narrower and the error clearly decreases. 6 Conclusions The use of a properly designed HIL test rig can effectively represent an interesting solution for the testing activities necessary to the validation of odometry devices. Such components have a heavy influence on the performance of the ATP/ATC control systems, especially on their safety and efficiency. The use of a HIL test rig allows to greatly simplify validation procedure. Test runs on the line are no more necessary and then the costs decreases sensibly. Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9 420 Computers in Railways IX Testing conditions are completely controllable and repeatable this permits for example the comparison between different solutions. Extreme testing conditions (very low adhesion conditions, axles locking up and so on), that are difficult or dangerous to be reproduced on the line, can be easily obtained. The use of such types of test rigs is being extended to the validation of the whole ATP on board subsystem (including the braking curve calculation and the intervention of the control system), and to the type approval of anti-skid devices. References [1] [2] [3] [4] [5] P. Toni, B.Allotta, A.Rindi, Un approccio innovativo alla progettazione di banchi prova per sistemi ferroviari, Ingegneria ferroviaria, Aprile 2003, n. 4, pp.341-347. B. Allotta, M. Malvezzi, L. Pugi, M. Rinchi, A. Rindi, P. Toni, A. Amore, R. Cheli, G. Cocci, P. Presciani, G. Puliatti, “A Test Rig for Evaluating Odometry Algorithms,” Proc. of 8th Int. Conf. on Computer Aided Design, Manufacture and Operation in the Railway and Other Advanced Mass Transit Systems, 12 - 14 June 2002, Lemnos, GR. TRENITALIA S.p.A. Unità Tecnologie Materiale Rotabile “SCMT Progetto dell’algoritmo per il calcolo della velocità istantanea del treno e dello spazio percorso,” UTMR/DT.S.PS, 31/10/2000. TRENITALIA S.p.A. Unità Tecnologie Materiale Rotabile “Odometria SCMT:Principi generali dell’algoritmo per il calcolo della velocità stimata in caso di pattinamento o slittamento degli assi di misura: Specifica Requisiti Funzionali.” Specifica N. 372574 esp. 03, 28/11/2002. TRENITALIA S.p.A. Unità Tecnologie Materiale Rotabile “Odometria SCMT:Principi generali dell’algoritmo per il calcolo della velocità stimata in caso di pattinamento o slittamento degli assi di misura: Specifica Requisiti Software” Bozza 4 Specifica N. 373450 esp. 00, 29/11/2002. Computers in Railways IX, J. Allan, C. A. Brebbia, R. J. Hill, G. Sciutto & S. Sone (Editors) © 2004 WIT Press, www.witpress.com, ISBN 1-85312-715-9
© Copyright 2026 Paperzz