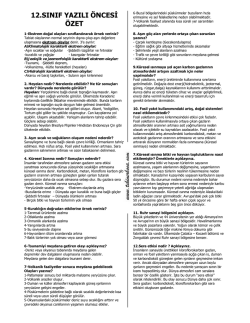
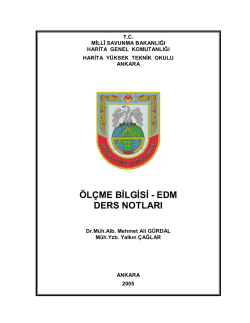
1/8 Koordinat Sistemleri ve Dönüşümer Ders Notları korelasyon kayıpları olmasına rağmen, yuvarlatma hatalarının etkilerinin daha da azaltılmasına yardımcı olacağı açıktır. 8 Dönüşüm Parametrelerinin Hesaplanması 8.1. 3B Benzerlik Dönüşümü Parametrelerinin Hesaplanması 3B benzerlik dönüşümü genellikle yersel datumlar arasında uygulanır. Bu tür datumlar arasındaki dönüşümlerde sırasıyla X, Y ve Z eksenleri etrafındaki dönüklükler α ≈ β ≈ γ ≈ 0 ve ölçek katsayısı k≈1 dir. x=t+k Ru 3B benzerlik dönüşüm bağıntısı 3B benzerlik dönüşüm bağıntısı x = t + k R 1 (α ) R 2 ( β ) R 3 (γ ) u 8.2. Polinomsal Yükseklik Dönüşümü Parametrelerinin Hesaplanması n ortak nokta sayısı ve d polinomun derecesi olmak üzere polinomsal dönüşümün genel bağıntısı. k=1,2, … , n ve i, j=0, 1, 2, … , d d d N k = hk − H k = ∑ ∑ aij x ki y kj d.5 inci yüzey fonksiyonu i =0 j =0 α ≈ β ≈ γ ≈ 0 olduğundan bu açıların kosinüsleri ~1 ve sinüsleri de açıların raydan değerlerine eşittir. 0 0 1 0 −β 1 0 1 γ γ −β 1 1 1 0 − γ 1 0 = − γ 1 R = R1 (α ) R 2 ( β ) R 3 (γ ) = 0 α 0 α 0 − α 1 β 0 1 0 0 1 β − α 1 Yukarıdaki kapalı 3B-benzerlik aşağıdaki bağıntı elde edilir. X X 0 Y = Y + k 0 Z Z 0 1 −γ β X j 1 0 0 Y j = 0 1 0 Z j 0 0 1 γ 1 −α 0 Wj −V j dönüşüm bağıntısı açık olarak yazılırsa Vj −U j 0 X 0 Y 0 U j Z0 Vj α W j β γ k d d inci yüzey fonksiyonu i =0 j =0 i + j <= d şeklinde hesaplanır. 8.3. Hız Dönüşümü Parametrelerinin Hesaplanması 8.3.1. Hız Dönüşüm Parametrelerinin Kestirimi X 0 0 Y Z 0 0 0 0 0 0 0 X Y Z 0 0 0 0 0 0 0 X Y 0 0 Z a V X b = V Y c VZ Yukarıda verilen açık gösterim, Kronecker çarpımının özelliklerinden yararlanılarak aşağıdaki gibi kapalı (matris-vektör biçiminde) yazılır. Yukarıdaki model her bir datum parametre grubunun (ötelemeler, dönüklükler ve ölçek) katsayılar matrisleri modelin katsayılar matrislerinin alt matrisleri şeklinde yeniden düzenlenirse aşağıdaki bağıntılar elde edilir. t x = [ I D u ] α k a ( I 3×3 ⊗ X ) b = V c Bağıntılarda geçen büyüklükler aşağıda açıklanmıştır. V T = [V X x = t + Dα + u k Bu modelde k = 1 + ∆ olarak alınırsa x = t + D α + u (1 + ∆) olarak elde edilir. Denklem birimlere göre yeniden düzenlenerek; X j U j 1 0 0 Y j − V j = 0 1 0 Z j W j 0 0 1 d N k = hk − H k = ∑ ∑ aij x ki y kj C1, C2, C3 derece noktaların hızları, TUTGA noktalarının hızlarına bağlı olarak genellikle üç boyutlu birinci dereceden bir yüzey modeliyle kestirilmektedir. Kartezyen koordinatları ve hız bileşenleri bilinen herhangi bir TUTGA noktası için bu model aşağıdaki gibi ifade edilir. Ayrıntılı bilgi için (Kurt vd., 2007) ye bakınız. − β U α V 1 W −W j 0 Uj 2/8 Koordinat Sistemleri ve Dönüşümer Ders Notları 0 W j / ρ cc − V j / ρ cc − W j / ρ cc V j / ρ cc 0 − U j / ρ cc U j / ρ cc 0 X0 Y 0 6 Z0 U j / 10 cc V j / 10 6 α cc W j / 10 6 β cc γ ∆ ppm VY XT = [X Y aT = [a X aY cT = [c X I 3×3 cY b T = [b X bY VZ ] TUTGA noktasının referans anındaki hız vektörü aZ ] X koordinatı yönündeki hız parametreleri cZ ] Z koordinatı yönündeki hız parametreleri Z] bZ ] TUTGA noktasının referans anındaki 3B kartezyen koordinatları Y koordinatı yönündeki hız parametreleri Birim matris n adet TUTGA noktası için normal denklemler aşağıdaki gibi oluşturulur. modeli elde edilir. Bu model hem ilk koordinatlara göre yazılmış ve hem de yuvarlatma hatalarının hesaplanan parametrelerdeki etkileri azaltılmış olur. Ağırlık merkezine ötelenmiş koordinatlar kullanılırsa, orijinal modele göre Yrd. Doç. Dr. Orhan KURT a n n I 3×3 ⊗ ∑ XTk X k b = ∑ Vk ⊗ X k k =1 k =1 c Bu eşitliğinin tek anlamlı çözülebilmesi için en az üç adet TUTGA noktasına ihtiyaç vardır. Normal denklemler çözülerek hız kestirim parametreleri bulunur. Yrd. Doç. Dr. Orhan KURT 3/8 Koordinat Sistemleri ve Dönüşümer Ders Notları 4/8 Koordinat Sistemleri ve Dönüşümer Ders Notları n adet TUTGA noktası için normal denklemler aşağıdaki gibi oluşturulur. a n b = (I ⊗ Q ) ∑ Vk ⊗ X k 3×3 3×3 k =1 c n Q 3×3 = ∑ X Tk X k k =1 (5) −1 (6) Hesaplanan hız kestirim parametreleri ile m adet yeni C derece noktanın hız bileşenleri, aşağıdaki bağıntıyla hesaplanır. a V j = I 3×3 ⊗ X j b c ( a n n I 3×3 ⊗ ∑ xTk x k b = ∑ Vk ⊗ x k k =1 k =1 c ) j=1,2,…,m Bu eşitliğinin tek anlamlı çözülebilmesi için en az üç adet TUTGA noktasına ihtiyaç vardır. Normal denklemler çözülerek hız kestirim parametreleri bulunur. a n b = (I ⊗ Q ) ∑ Vk ⊗ x k 3×3 3×3 k =1 c n Q 3×3 = ∑ x Tk x k k =1 (5) −1 (6) TUTGA noktasının hız bileşenleri için düzeltmeler aşağıdaki gibi bulunur. Kroneker Çarpımı ε X a ε k = ε Y = ( I 3×3 ⊗ X k ) b − Vk ε Z c n σ0 = ± A n×m ve B p×q her hangi iki matris olmak üzere, Kronoker çarpımı aşağıdaki gibi hesaplanır. T ∑εk εk k =1 (n > 3) 3(n − 3) A n×m a11 a = 21 L a n1 a12 a 22 L an 2 b11 b12 L a1m b b22 L a 2 m 21 , B p×q = L L L L L a nm b p1 b p 2 b1q a11B p×q a B b2 q 21 p×q , C np×mq = L L L L b pqm a n1B p×q L a12 B p×q L a 22 B p×q L a n 2 B p×q L a1m B p×q L a 2 m B p×q L L L a nm B p×q Hız parametrelerinin kestirimi için yukarıda oluşturulan model, ötelenmiş 3B kartezyen koordinatlara göre oluşturulmalıdır. [x y X z ]Tk = X0 Y Y0 T Z Z0 k (k=1,2,…,n) Yukarıdaki eşitlikte X0, Y0 ve Z0 TUTGA noktalarının ağırlık merkezi koordinatlarıdır. Kondisyon sorunu çözebilmek için eşitliklerde normlandırılmış koordinatlar kullanılmalıdır (Kurt vd., 2007). 8.3.2. BÖHYY Önerilen Hız Dönüşüm Parametrelerinin Kestirimi Yönetmelikteki hız dönüşümü, projeksiyon koordinatlarına dayalı olarak doğrusal polinomsal 1 y x 0 0 0 0 0 0 a V X 0 0 0 1 y x 0 0 0 b = V Y 0 0 0 0 0 0 1 y x c VZ V T = [V X xT = [ x [ [ cT = [c0 VY y ] aT = a0 ay b T = b0 by I 3×3 cy VZ ] ] ] cz ] TUTGA noktasının referans anındaki hız vektörü Projeksiyon koordinatları ax X koordinatı yönündeki hız parametreleri bx Y koordinatı yönündeki hız parametreleri Z koordinatı yönündeki hız parametreleri Birim matris Yrd. Doç. Dr. Orhan KURT Yrd. Doç. Dr. Orhan KURT 5/8 Koordinat Sistemleri ve Dönüşümer Ders Notları 6/8 Koordinat Sistemleri ve Dönüşümer Ders Notları EK-1 Lineer Cebir EK-2. Elipsoit Geometrisi Matris İşlemleri İki odağa uzaklıkları toplamı eşit olan noktalar kümesinin olşuturduğu geometrik şekle elips denir. A , K , I B , n ,m m ,n C D , , F , H m ,m n ,n −1 dikdörtgen matrisler ve birim matris n ,n Cayley inversi alınabilen kare matrisler b n ,n T C P m ,n ve C : C matrisinin tersi (inversi) ve transpozesi (evriği) F1 T K = A ± B −1 C C = CC ea ea F2 a −1 = I C I = I C =C A B=C B A=D CF = H ( C F ) −1 = F n× n T ( AB )T = B A T =C T −1 C −1 =H −1 a b f=(a−b)/a e2=(a2−b2)/a2 e’2=(a2−b2)/b2 F1P+F2P=2a Genel Doğrusal Denklem Takımlarının Çözümü. A m ,n x n = b m Genel Doğrusal Denklem Takımı m ve n Satır ve sütun sayısı m*n boyutlu katsayılar matrisi A m ,n n boyutlu bilinmeyenler vektörü m boyutlu sabit terimler vektörü xn bm olmak üzere; genel denklem çözüm üç şekilde gerçekleştirilir. 1) m = n ise det(A)≠0 olmak koşulu ile Tek Anlamlı Çözüm aşağıdaki gibi bulunur. xn = −1 A n ,n b n Bilinmeyenlerin çözümü Büyük yarı eksen (semi-major axis) küçük yarı eksen (semi-minor axis) Basıklık (flattening) Birinci dışmerkezlik (first eccentricity) İkinci dışmerkezlik (second eccentricity) P noktasının odaklara (F1 ve F2) uzaklıklarının toplamı=sabit Tablo-1 Dünyada yaygın olarak kullanılan Dönel Elipsoit parametreleri Elipsoit a (m) b (m) Açıklama Hayford 6378388 6356911.94613 GRS80 6378137 6356752.31414 WGS84 6378137 6356752.31425 Bessel Krassowsky 6377397.15508 6378245 6356078.96290 6356863.01877 Clarke 1866 6378206.4 6356583.80012 ED50 Europe Datum 1950, Uluslar arası elipsoit GRS80 (NAD83) Geodedic Referans System 1980, ABD WGS84 World Geodedic System 1884, GPS Almanyada Kullanılır Doğu Bloku Ülkelerinde Kulanılır NAD27 North America Datum 1927, Eski ABD 2) m < n ise tek anlamlı çözüm için Lagrange Dönüşümü nden yararlanılır. x n = ATn ,m y Yardımcı bilinmeyenler (korelatlar) m ( A AT )m ,m y m = bm Yardımcı bilinmeyenler ile Bir elipsin küçük ekseni etrafında döndürülmesi sonucu elde edilen geometrik şekle dönel elipsoit denir. Z denklem takımı y m −1 = ( A AT )m ,m b m [A T Yardımcı bilinmeyenlerin çözümü T −1 xn = ATn ,m y = m Q −1 = A n ,m ( A A )m ,m A m ,n T n ,n ( AA ) ] b Bilinmeyenlerin çözümü n ,m b m T Bilinmeyenlerin ters ağırlık matrisi λ 3) m > n ise tek anlamlı çözüm için Gauss Dönüşümü nden yararlanılır. [ x n = ( A A )n−,1n ( A b )n = ( A A ) − 1 A T T Q T n ,n =(A A )n−1,n ϕ a T T ] n ,m b m Y λ=90o a X λ=0o Bilinmeyenlerin çözümü Bilinmeyenlerin ters ağırlık matrisi Yrd. Doç. Dr. Orhan KURT x x = y z 1 / a 2 SE = 0 0 0 1 / a2 0 0 0 2 1/ b Yrd. Doç. Dr. Orhan KURT 7/8 Koordinat Sistemleri ve Dönüşümer Ders Notları 8/8 Koordinat Sistemleri ve Dönüşümer Ders Notları Ek-3. Yansıma ve Dönüklük Matrisleri Z Ortogonal Dönüşüm: X ve Y sütun vektörler ve A dönüşüm matrisi olmak üzere Q y = A x P bağıntısına doğrusal dönüşüm denir. İki vektör aynı uzunlukta iseler, dönüşüm ve dönüşüm matrisi her ikisi birden orthogonal olarak adlandırılır. R b T T T y y = x A A x =u β ψ ϕ M a X Y olabilmesi için AT A = I olmalıdır. Ortogonal matrislerde AT A = A −1 A = I , AT = A −1 N det( A ) = ±1 olur. İki çeşit orthogonal dönüşüm vardır; dönüklük ve yansıma. matrislerinde det( A ) = 1 ve yansıma matrislarinde det( A ) = −1 dir. Dönüklükler: matrislerinde önemlidir. Sağ el değişme Dönüklük koordinat sistemine gore yazılmıştır. Dönüklük özelliği yoktur. Dönüklüklerin uygulanış sırası Z 0 1 R1 (θ ) = 0 cos θ 0 − sin θ Dönel Elipsoidin denklemi. xT S E x = ψ ϕ β P Q,R M N RG N cosϕ x2 + y2 a 2 + z2 b2 =1 0 sin θ Dönüşüm 2.(Y) Eksenden 3.(Z) eksene cos θ X θ Y Z Y Merkezi enlem Jeodezik enlem Đndirgenmiş enlem Elipsoit üzerindeki nokta P noktasının dairelere projeksiyonu Meridyen yönündeki eğrilik yarı çapı Meridyene dik yöndeki eğrilik yarıçapı Gauss eğrilik yarıçapı ϕ enlemindeki küçük daire yarıçapı cos θ θ X R2 (θ ) = 0 sin θ cos θ R3 (θ ) = − sin θ 0 sin θ cos θ 0 0 − sin θ 1 0 Dönüşüm 3.(Z) Eksenden 1.(X) eksene 0 cos θ 0 0 Dönüşüm 1.(X) Eksenden 2.(Y) eksene 1 tgβ β = b/a tgϕ ϕ = a/b tgψ ψ Y Z X N = a / (1 − e2 sin2ϕ )1/2 = a2 / (a2cos2ϕ+ b2sin2ϕ)1/2 R(α , β , γ ) = R1 (α ) R2 ( β ) R3 ( γ ) yada R(α , β , γ ) −1 = R3 ( γ ) −1 R2 ( β ) −1 R1 (α ) −1 M = a(1-e2) / (1− −e2sin2ϕ)3/2 Rk (θ ) −1 = Rk (θ )T = Rk ( −θ ) RG=(M N) θ 1/2 Rk (θ )Rk ( ε ) = Rk (θ + ε ) Yansımalar: Yansıma matrislerinde değişme özelliği vardır. − 1 0 0 P1 = 0 1 0 0 0 1 P1 P2 = P2 P1 Yrd. Doç. Dr. Orhan KURT 1 0 0 P2 = 0 − 1 0 0 0 1 1 0 0 P3 = 0 1 0 0 0 − 1 ve Pk−1 = Pk dir. Yrd. Doç. Dr. Orhan KURT
© Copyright 2026 Paperzz