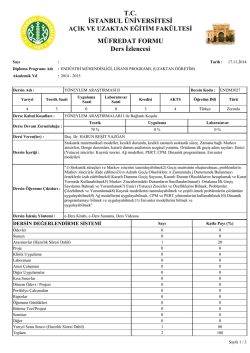
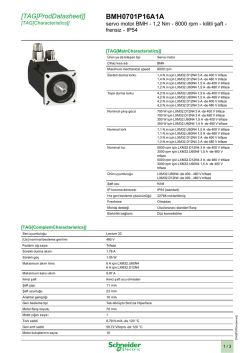
URSI-TÜRKĠYE’2014 VII. Bilimsel Kongresi, 28-30 Ağustos 2014, ELAZIĞ Zaman Gecikmeli Kaotik Bir Sistemin Aktif Kontrol İle Senkronizasyonu Gülten Çetintaş1, Vedat Çelik2 1 Mühendislik Fakültesi, Elektrik-Elektronik Mühendisliği Bölümü Muş Alparslan Üniversitesi, 49250 Muş [email protected] 2 Mühendislik Fakültesi, Elektrik-Elektronik Mühendisliği Bölümü Fırat Üniversitesi, 23119 Elazığ [email protected] Özet: Bu bildiride, basit bir yapıda olan zaman gecikmeli doğrusal olmayan özdeş iki kaotik sistemin (biri Master-Verici diğeri Slave-Alıcı olmak üzere) farklı başlangıç şartları için kaos senkronizasyonu gerçekleştirilmiştir. Bu amaçla Master ve Slave sistemlerin çıkışındaki hatayı sıfıra götürebilmek için Slave sisteme uygun bir kontrol işareti uygulanmasını sağlayacak bir oransal kontrolör, aktif kontrol yöntemi kullanılarak tasarlanmıştır. Elde edilen kontrolörün etkinliği Lambert W fonksiyonu kullanılarak test edilmiş ve uygun kazanç parametresi seçilmiştir. Elde edilen sonuçlar, sisteme ait simülasyon sonuçlarıyla doğrulanmıştır. Abstract: In this paper, the chaos synchronization of two identical non-linear time delay chaotic system with a simple structure (One Master-Transmitter, other Slave-Receiver) has been carried out for different initial conditions. For this purpose, a proportional controller to provide a control signal for the slave system has been designed by using active control methods in order to be zero error at the output of the master and slave system. Efficacy of controller which is obtained has been tested using Lambert W function and appropriate gain parameter was selected. The obtained results have been confirmed by the simulation results of the system. 1. Giriş Kaosun başlangıç şartlarına hassas bağlı olması ve önceden kestirilemeyen yapıda olmasından dolayı kaos senkronizasyon güvenli haberleşme sistemlerinde kullanılmaktadır [1-4]. Bu yüzden kaotik sistemlerin senkronizasyonunu gerçekleştirmek önemli bir konu halini almıştır. [5-7]’de sunulan sistem, doğrusal olmayan zaman gecikmeli yapıdadır ve aşağıdaki bir boyutlu zaman gecikmeli diferansiyel denklem ile tanımlanmaktadır. x x ( x )3 (1) Burada, δ ve ε pozitif sistem parametreleri, x=x(t-) ve R+ olmak üzere sabit bir zaman gecikmesidir. Denklem (1)’de tanımlanan sistem, zaman gecikmesi ve sistem parametrelerine bağlı olarak asimptotik kararlı, limit çevrim ve kaotik davranış türlerini gösterebilmektedir. δ=ε=1 ve =1.6s için bu sistem kaotik davranış göstermektedir. Bu bildiride, Denklem (1)’de verilen doğrusal olmayan zaman gecikmeli özdeş iki sistemin biri Master (Verici) diğeri ise Slave (Alıcı) olmak üzere kaos senkronizasyonu için, [8-9]’da verilen aktif kontrol yöntemiyle bir oransal kontrolör önerilecek ve uygun kazanç değeri ise [10]’da verilen, zaman gecikmeli sistemlerin kutup yerleşiminin tespit edilmesine yardımcı olan, Lambert W fonksiyonu ile tespit edilecektir. Bu girişle birlikte, Bölüm 2’de, (1)’de verilen sistemin aktif kontrolle senkronizasyonu için gerekli olan oransal kontrolör belirlenecek ve Lambert W fonksiyonu kavramı sunulacaktır. Bölüm 3’te Lambert W fonksiyonu kullanılarak uygun oransal kontrol kazancı belirlenecektir. Bölüm 4’de elde edilen kontrolör kazanç değerlerine göre oluşturulan sisteme ait nümerik sonuçlar verilecek ve son olarak Bölüm 5’de sonuçlar kısmı tartışılacaktır. 2. Zaman Gecikmeli Kaotik Sistemin Aktif Kontrol Yöntemiyle Senkronizasyonu Şekil 1’de verilen özdeş iki zaman gecikmeli doğrusal olmayan kaotik sistemin, [8-9]’da verilen aktif kontrolle senkronizasyonu gerçekleştirmek için farklı başlangıç şartları için çıkışlarının hata dinamiğinin elde edilmesi gerekecektir. Denklem (2.a)’da Master ve (2.b)’de Slave sistem ve kontrol fonksiyonundan oluşan sistemin modelleri verilmiştir. URSI-TÜRKĠYE’2014 VII. Bilimsel Kongresi, 28-30 Ağustos 2014, ELAZIĞ Master (Verici) Xm u0 Slave (Alıcı) + - Xs Δ Kontrolör Şekil 1. Kaos senkronizasyon blok diyagramı x m xm ( xm ) 3 (2.a) x s xs ( xs ) 3 0 (t ) (2.b) burada 0(t) kontrol fonksiyonudur. Bu özdeş iki sistemin hata dinamiğini tanımlayan ifade Denklem (3)’te ifade edilmiştir. x s x m ( xs xm ) ( xs ) 3 ( xm ) 3 0 (t ) (3) Eğer x s x m , xs xm ve u 0 (t ) ( xs ) 3 ( xm ) 3 0 (t ) alınırsa, hata dinamiği aşağıdaki biçimde elde edilecektir. u 0 (t ) 0 (t ) u0 (t ) ( xs ) 3 ( xm ) 3 forma dönüşür. (4) olmak kaydıyla, u0 (t ) K olarak seçildiğinde Denklem (4) aşağıdaki ( K ) (5) Denklem (5)’te elde edilen hata dinamiğinin karakteristik denklemi aşağıdaki biçimde olacaktır ve bu ifadenin kökleri hata dinamiğinin kutuplarını verecektir. Senkronizasyonun gerçekleşebilmesi için hatanın sıfıra gitmesi gerekir ve bu, ancak Denklem (6)’daki ifadenin köklerinin, yani hata dinamiğinin kutuplarının, sol yarı sdüzleminde olmasıyla sağlanabilecektir. ( K )e 0 (6) =jω için (6)’yı sıfır yapacak K kazanç değerleri belirlendikten sonra Denklem (6)’nın köklerinin sol yarı sdüzleminde olduğu K kazanç aralığını bulmak için Lambert W fonksiyonu kullanılabilir. Lambert W fonksiyonu aşağıda verilen eşitlikle ifade edilmektedir. W ( x)eW ( x ) x Bu ifade Denklem (6)’ya uygulanırsa aşağıdaki eşitlik elde edilecektir. (7) URSI-TÜRKĠYE’2014 VII. Bilimsel Kongresi, 28-30 Ağustos 2014, ELAZIĞ 1 W ( ( K )) (8) Matlab ortamında farklı sistem parametresi ve zaman gecikmesi değerleri için denklem (8) çözülebilir. Elde edilen sonuçlara göre kararlı olunan kazanç değerleri tespit edilebilir. 3. Uygulama Bu bölümde Denklem (1)’de verilen özdeş iki modelin farklı başlangıç şartları için senkronizasyonu Bölüm 2’ de verilen yolla gerçekleştirilecektir. Bu amaçla kaotik davranışın gözlendiği sistem parametreleri olan δ=ε=1 ve =1.6s seçilecektir. Verilen sistem parametreleri için =jω alındığında Denklem (6)’nın gerçek ve kompleks iki ifade elde edilecektir. ( K ) cos( ) 0 ( K ) sin( ) 0 (9) Denklem (9)’u sağlayan K kazanç değerleri, K=1 ve K=1.981 dir. Hata dinamiğinin kutupları Denklem (8)’de verilen ifadeyle incelenecek olursa, farklı K kazanç değerleri için Lambert W fonksiyonu ile elde edilmiş kutup yerleşimi Şekil 2’de verilmiştir. K=1.2 K=0.8 25 20 20 15 15 10 10 5 jω jω 5 0 0 -5 -5 -10 -10 -15 -15 -20 -20 (a) (b) -25 -3 -2.5 -2 -1.5 -1 -0.5 -3 0 -2.5 -2 -1.5 K=1.5 0 K=2.5 25 25 20 20 15 15 10 10 5 5 0 jω jω -0.5 σ σ 0 -5 -5 -10 -10 -15 -15 (c) -20 -25 -2.5 -1 -2 -1.5 -1 σ -0.5 0 (d) -20 -25 -1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 σ Şekil 2. δ=ε=1 ve =1.6 s için zaman gecikmeli doğrusal olmayan sistemin kutuplarının s-düzlemindeki konumları: a) K=0.8, b) K=1.2 , c) K=1.5 ve d) K=2.5. Şekil 2’ye bakıldığında, 1<K<1.981 aralığındaki değerler için hata dinamiğinin tüm kutupları sol yarı sdüzlemindedir. Bu Slave sistemin Master sistemi belirli bir süre sonra takip edeceği anlamına gelir. K=1.5 için kutuplar kompleks eşlenik olduğundan belirli bir osilasyon sonunda hata sıfıra ulaşırken, K=1.2 için dominant kutup reel eksen üzerinde olduğu için sönümsüz bir şekilde üssel olarak sıfıra gidecektir. Bundan dolayı oransal kontrolörün kazanç değeri K=1.2 alınarak senkronizasyon osilasyonsuz bir şekilde sağlanabilecektir. 4. Nümerik Sonuçlar Bu bölümde aktif kontrol yöntemiyle senkronizasyonu sağlamak amacıyla kullanılan oransal kontrolörün farklı kazanç değerleri için özdeş iki kaotik sistemin, Matlab/Simülink ortamında elde edilen nümerik sonuçları sunulacaktır. Sisteme ait nümerik sonuçlar elde edilirken tüm uygulamalarda Master sistemin başlangıç şartı x0m=0.9 ve Slave sistemin başlangıç şartı x0s=0.1olarak alınacaktır ve senkronizasyonu sağlayacak olan kontrolör 50. saniyede devreye alınacaktır. Şekil 3’de kontrolörün hata dinamiğini kararlı yapacağı kazanç değerleri K=1.2 ve1.5 için Master ve Slave çıkışlarının zamana göre değişimleri ve iki çıkış arasındaki hatanın değişimi elde edilmiştir. URSI-TÜRKĠYE’2014 VII. Bilimsel Kongresi, 28-30 Ağustos 2014, ELAZIĞ K=1.2 K=1.2 2.5 1.5 2 1.5 1 1 Δ(t-) x(t-) 0.5 0 -0.5 0.5 0 -0.5 -1 -1 -1.5 -2 -1.5 -2.5 0 Kontrolör Aktif 50 t(s) 100 150 0 Kontrolör Aktif 50 t(s) 100 150 (a) K=1.5 K=1.5 2.5 1.5 2 1.5 1 1 Δ(t-) x(t-) 0.5 0 -0.5 0.5 0 -0.5 -1 -1 -1.5 -2 -1.5 0 50 Kontrolör Aktif t(s) 100 -2.5 150 0 50 Kontrolör Aktif t(s) 100 150 (b) Şekil 3. δ=ε=1 ve =1.6 s için zaman gecikmeli doğrusal olmayan özdeş Mater ve Salve sistemlerin çıkışı ve aralarındaki hata, a) K=1.2, b) K=1.5 (Düz çizgi: Master, Kesikli çizgi: Salve) Şekil 3’e bakıldığında, her iki kontrol kazancı için de kontrolör devreye girdikten sonra senkronizasyonun gerçekleştiği görülmektedir. Ancak K=1.2 için aradaki hata üssel sıfıra giderken K=1.5 için osilasyon yaparak sıfıra gittiği görülmektedir. Benzetim sonuçlarına bakıldığında kontrolör kazancı olarak K=1.2 seçilmesinin uygun olduğu görülür. 5. Sonuçlar Bu bildiride, doğrusal olmayan zaman gecikmeli kaotik bir sistemin senkronizasyonu gerçekleştirilmiştir. Bunu sağlamak için zaman gecikmeli birinci derece doğrusal olmayan özdeş iki sistemin farklı başlangıç şartları için senkronizasyonunu aktif kontrol yöntemi kullanılarak uygun bir oransal kontrolörle sağlanmıştır. Kontrolör kazanç değerleri Lambert W fonksiyonu ile test edilmiş ve osilasyonsuz bir hata dinamiğinin oluşması için uygun kontrolör kazancının K=1.2 olduğu tespit edilmiştir. Elde edilen sisteme ait simülasyon sonuçlarında da beklendiği biçimde senkronizasyonun gerçekleştiği görülmüştür. Kaynaklar [1] Cuomo K.M., Oppenheim A.V., Strogatz, S.H., “Synchronization of Lorenz-Based Chaotic Circuits with Applications to Communications”, IEEE Trans. On CAS-II, 40(10), s: 626–633, 1993. [2] Yang T., Chua L.O., “Secure Communication via Chaotic Parameter Modulation”, IEEE Trans. On CAS-I, 43(9), s: 817–819, 1996. [3] Li Z., Li K., Wen C., Soh Y.C., “A New Chaotic Secure Communication System”, IEEE Trans. on Communications, 51(8), s: 1306–1312, 2003. [4] Grzybowski J.M.V., Rafikov M., Balthazar J.M., “Synchronization of the unified chaotic system and application in secure communication”, Commun Nonlinear Sci. Numer. Simulat., 14,s: 2793–2806, 2009. [5] Uçar A., Bishop S.R., “Chaotic behaviour in a nonlinear delay system”, Int. J. Nonlinear Sci. Num. Sim., 2, s:289–294, 2001. [6] Uçar A., “A prototype model for chaos studies”, Int. J. Eng. Sci., 40, s: 251–258, 2002. [7] Uçar A., “On the chaotic behavior of a prototype delayed dynamical system”, Chaos Solitons and Fract., 16, s:187–194, 2003. [8] Bai E. W., Lonngren K. E.,” Synchronization of two Lorenz systems using active control”, Chaos Solitons and Fract., 8(1), s:51–58, 1997. [9] Uçar A., Lonngren K. E., Bai E.W.,”Synchronization of chaotic behavior in nonlinear Bloch equations”, Physics Letters A, 314, s: 96–101, 2003. [10] Corless R. M., Gonnet G. H., Hare D. E. G., Jeffrey D. J., Knuth D. E., “On the LambertW function”, Advances in Computational Mathematics, 5(1), s:329-359, 1996.
© Copyright 2026 Paperzz