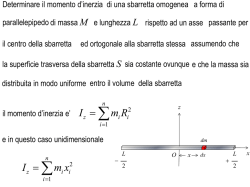
CORSO DI TECNICA DELLE COSTRUZIONI ESERCITAZIONE n° 2 del 13/11/2014 VERIFICHE DI RESISTENZA DI ELEMENTI INFLESSI L’esercitazione riguarda le modalità per la verifica di resistenza di elementi inflessi in carpenteria metallica. La capacità resistente delle sezioni nei confronti delle sollecitazioni di trazione o compressione, flessione, taglio e torsione si calcola con uno dei seguenti metodi: - Metodo Elastico (E): comportamento elastico del materiale fino allo snervamento; Metodo plastico (P): completa plasticizzazione del materiale; Metodo elasto-plastico (EP): legami costitutivi del materiale di tipo bilineare o più complessi. Focalizziamo l’attenzione sui primi due metodi con particolare riguardo al loro utilizzo nelle verifiche di resistenza degli elementi inflessi. 1) CALCOLO DEL MOMENTO RESISTENTE: METODO ELASTICO Dal punto di vista operativo, il metodo elastico per il calcolo del momento resistente è sempre consentito, qualsiasi sia la classe del profilo. Nel caso di elementi in classe 4 (non considerati in questa sede), si deve però fare riferimento alla sezione efficace. Richiamiamo la teoria della flessione delle travi in campo elastico. La teoria della flessione elasto-plastica simmetrica si basa, come la teoria elastica, sulla classica ipotesi di Bernoulli, della conservazione delle sezioni piane. La validità della ipotesi si può riscontrare con considerazioni di simmetria. Si prenderà in considerazione, per esigenze di tempo, il solo caso della sezione con doppio asse di simmetria. Sia x l'asse di flessione, y il secondo asse di simmetria. É noto che in campo elastico x è l’asse neutro mentre i diagrammi degli allungamenti unitari longitudinali, εz=ε, e delle corrispondenti tensioni, σz=σ, si possono rappresentare sovrapposti ed hanno l'aspetto mostrato nella figura seguente. Valgono Ie ben note espressioni: ε =σ =M ⋅1 = M y E W E EI 1 σ=M y I σ max = M h = M I 2 Wel con M=Mx momento flettente agente, costante lungo l'asse z, E modulo elastico del materiale, I=Ix momento d'inerzia della sezione rispetto ad x e Wel modulo di resistenza elastico del materiale. Se ne deduce che il momento resistente della sezione, calcolato con il metodo elastico, vale ( σ max = f yk ): M el = f ykWel E il corrispondente valore di calcolo è pari a: f ykWel M Rd ,el = γ 2) CALCOLO DEL MOMENTO RESISTENTE: METODO PLASTICO L’utilizzo del metodo plastico per il calcolo del momento resistente è consentito soltanto per sezioni in Classe 1 o 2, per le quali non si abbia il rischio del verificarsi di fenomeni di instabilità locale prima del raggiungimento dello snervamento dell’acciaio in tutta la sezione. Per introdurre tale metodo è necessario estendere la teoria vista al punto precedente al caso elasto-plastico. Si supponga ora che il materiale sia del tipo elastico-perfettamente plastico con limiti di snervamento uguali a trazione e a compressione (± σs). Finchè σmax si mantiene inferiore al limite di snervamento σs la teoria elastica rimane valida. Ciò avviene fin tanto che: M ≤ M el Per M>Mel si ha la flessione elasto-plastica; il diagramma delle ε rimane lineare ((b) 0 (c) nella figura di seguito) mentre Ie tensioni σ non possono superare, in valore assoluto, il valore σs nelle fibre per le quali si ha: ε > εs = σs E Si ottiene così il caratteristico diagramma delle tensioni indicato in figura (b 0 c). Detta y la distanza delle fibre nelle quali ε = ε s , in virtù dell’ipotesi di conservazione delle sezioni piane (e conseguente linearità del diagramma delle ε), imponendo la seguente relazione di proporzionalità: 2 y ⋅σ y s si ricava che la condizione di equilibrio fra tensioni e momento agente si traduce nella relazione: y : y = ε : εs = σ : σ s ⇒ y ⋅σ s = y ⋅σ ⇒ σ = h2 y y M = ∫∫ σ ydA = 2 ∫ σ s yb ( y ) dy + 2 ∫ σ s yb ( y ) dy y A 0 y introdotta la curvatura: 2ε ε χ = max = s h y La relazione precedente si scrive: χ M = 2σ s ε s εs χ ∫ y b ( y ) dy + 2 0 yb y d y ( ) = 2σ s f ( χ ) ∫ εs χ h 2 Al crescere della curvatura il primo termine tra [] perde importanza di fronte al secondo; al limite, per χ tendente all'infinito (il che costituisce una astrazione, irraggiungibile nella realtà), si conserva soltanto il secondo integrale e si ha: h2 lim M = 2σ s χ →∞ ∫ yb ( y ) dy = 2σ S s 0 II valore limite, Mpl, si indica quale momento plastico; esso risulta eguale, in base alla relazione precedente, al prodotto della tensione di snervamento per la quantità 2S (che si può denominare, per analogia con il caso elastico, modulo di resistenza plastico), ossia per il doppio del momento statico di mezza sezione rispetto all'asse neutro x. Se ne deduce che il momento resistente della sezione, calcolato con il metodo plastico, vale ( σ s = f yk ): M pl = f ykWpl W pl = 2S E il corrispondente valore di calcolo è pari a: f ykW pl M Rd , pl = γ Il rapporto Mpl/Mel vale dunque: M pl W pl 2 S 2 S h = = = M el Wel Wel I 2 II guadagno di resistenza dovuto alla duttilità del materiale (qui supposta infinita), ossia alla plasticità, è quindi pari ad una quantità (detta fattore di forma) che dipende esclusivamente dalla forma della sezione. Nel caso della sezione più razionale dal punto di vista della flessione, la sezione a doppio T limite, il guadagno è nullo perchè si ha Wpl/Wel=1. La sezione è già sfruttata completamente quando si raggiunge il momento massimo elastico. Viceversa, nel caso di sezione quadrata con asse di flessione secondo una diagonale, si ha Wpl/Wel =2. Il guadagno dovuto alIa plasticità è, in questa sezione poco sfruttata in campo elastico, rilevante. Valori intermedi si hanno per la sezione circolare piana (1,70), la sezione circolare cava di spessore sottile (1,27), la sezione rettangolare con asse di flessione secondo un asse di simmetria (1,5). 3 Nel caso di sezioni a doppio T commerciali il rapporto Wpl/Wel si avvicina al valore limite 1: si ha ad esempio un valore circa pari a 1,14 per i profilati IPE. La teoria esposta può essere estesa anche a sezioni con un solo asse di simmetria. In questo caso occorre sottolineare che l’asse neutro plastico è tale da dividere la sezione in due parti di area uguale. Rimane la nozione di modulo di resistenza plastico come somma dei momenti statici della metà superiore e della metà inferiore rispetto all’asse neutro plastico. 3) DEFINIZIONI Ricordiamo innanzitutto alcune definizioni utili per il calcolo delle caratteristiche della sezione 3.1 Momento di inerzia: di una figura piana rispetto a un asse è definito come: Ix = ∫ y 2dA =∑ i yi2 ⋅ ∆Ai A 3.2 Teorema di Huygens-Steiner: o teorema degli assi paralleli, permette di calcolare il momento di inerzia rispetto ad un asse parallelo a quello passante per il baricentro. Il momento rispetto ad un asse a, parallelo ad un altro c passante per il baricentro, si ottiene sommando al momento di inerzia rispetto a c il prodotto tra l’area e la distanza al quadrato, d, tra gli assi c ed a: Ix = IxG + A ⋅ d 2 3.3 Momento statico: o momento di primo ordine è il prodotto di una grandezza fisica o geometrica per una distanza. Nel nostro caso, cioè di momento statico di una superficie, è definito come: Sx = ∫ y ⋅ dA = ∑ i yi ⋅ ∆Ai A La definizione stessa di momento statico comporta che questo possa risultare: − positivo quando l’asse è esterno alla superficie; − negativo quando l’asse attraversa la superficie e i prodotti negativi sono superiori rispetto a quelli positivi; − nullo nel caso di asse baricentrico 4) APPLICAZIONI 4.1 Si completi la tabella riportata di seguito, contenente i momenti resistenti plastici ed elastici di alcuni profili commercial a doppia T realizzati in acciaio S275 e calcolati rispetto all’asse di inerzia maggiore. I valori dei moduli di resistenza elastico e plastico possono essere ricavati da cataloghi di profili commerciali. Profilo Wel ( mm3 ) W pl ( mm3 ) M Rd ,el ( kNm ) M Rd , pl ( kNm ) M Rd , pl / M Rd ,el IPE 200 IPE 400 HEA 200 HEA 400 HEB 200 HEB 400 4 4.2 Si completi la tabella riportata di seguito attraverso il calcolo analitico dei moduli di resistenza mancanti (esplicitare tutti i passaggi). 5
© Copyright 2026 Paperzz