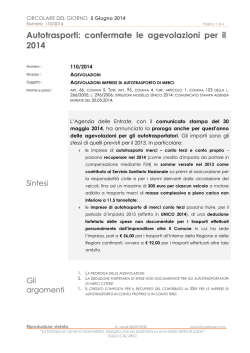
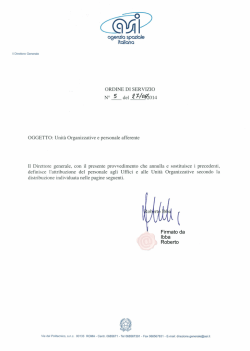
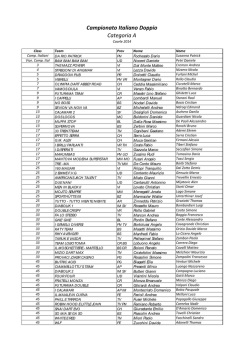
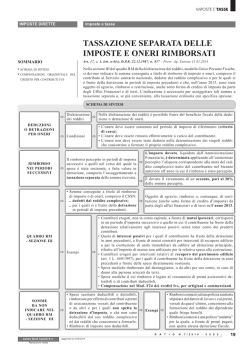
Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Schemi di controllo centralizzato Claudio Melchiorri Dipartimento di Ingegneria dell’Energia Elettrica e dell’Informazione (DEI) Universit` a di Bologna email: [email protected] Claudio Melchiorri Schemi di controllo centralizzato 1 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Sommario 1 Controllo PD + compensazione di gravit` a 2 Controllo a dinamica inversa Claudio Melchiorri Schemi di controllo centralizzato 2 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo PD + compensazione di gravit` a Si vuole determinare un controllore che assicuri una globale asintotica stabilit` a al sistema dinamico non lineare descritto da ˙ q˙ + Dq˙ + g(q) = u M(q)¨ q + C(q, q) Sia data una configurazione di equilibrio descritta da qd . Si definisca ˜ = qd − q q e si consideri il sistema dinamico con stato definito da ˜ q x= q˙ Per la determinazione del controllore, si utilizza il metodo diretto di Lyapunov. Claudio Melchiorri Schemi di controllo centralizzato 3 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo PD + compensazione di gravit` a Si considera la funzione candidata di Lyapunov 1 T 1 T ˜ KP q ˜>0 q˙ M(q)q˙ + q 2 2 dove KP `e una matrice quadrata definita positiva. ˙ = V (q, q) ˙ q ˜ 6= 0 ∀q, ˙ `e composta di due termini: La funzione V (q, q) 1/2 q˙ T M(q)q˙ che rappresenta l’energia cinetica del sistema; ˜T KP q ˜ 1/2 q che pu` o essere considerato come energia elastica immagazzinata da un sistema di molle con rigidezza equivalente KP realizzato dagli anelli di controllo. Claudio Melchiorri Schemi di controllo centralizzato 4 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo PD + compensazione di gravit` a ˜˙ = −q): ˙ Derivando V rispetto al tempo (q 1 T ˙ q˙ − q˙ T KP q ˜ V˙ = q˙ M¨ q + q˙ T M 2 ma M¨ q = u − Cq˙ − Dq˙ − g per cui V˙ = = = Per` o: 1 T ˙ ˜ q˙ Mq˙ − q˙ T KP q 2 1 ˙ q˙ − q˙ T KP q ˜ q˙ T (u − Cq˙ − Dq˙ − g) + q˙ T M 2 1 T ˙ ˙ q˙ − q˙ T Dq˙ + q˙ T [u − g(q) − KP q ˜] q˙ [M(q) − 2C(q, q)] 2 q˙ T M¨ q+ ˙ ˙ q˙ = 0 q˙ T [M(q) − 2C(q, q)] per la scelta fatta di C; −q˙ T Dq˙ `e definito negativo; scegliendo ˜ u = g(q) + KP q ci si assicura che V˙ sia semidefinita negativa, poich`e V˙ = 0 Claudio Melchiorri q˙ = 0, ∀˜ q Schemi di controllo centralizzato 5 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo PD + compensazione di gravit` a In realt` a, si ottiene questo risultato anche con la scelta: ˜ − KD q˙ u = g(q) + KP q essendo KD una matrice definita positiva, in quanto si ha V˙ = −q˙ T (D + KD )q˙ e quindi un miglioramento in termini di rapidit` a di convergenza delle traiettorie a zero. Il termine KD q˙ equivale all’introduzione di un’azione derivativa nell’anello di controllo. Claudio Melchiorri Schemi di controllo centralizzato 6 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo PD + compensazione di gravit` a Osservazioni: KD ✛ qd ˜ q ✲ ❧✲ KP - ✻ + u ❄ ✲ ❧✲ ❧ ✲ q˙ Manipol. - ✻ ✲ ✲ q g(˙) ✛ Legge di controllo non lineare nei termini gravitazionali e con azione lineare di tipo PD: il sistema risulta asintoticamente globalmente stabile per qualsiasi scelta di KP , KD definite positive L’azione derivativa `e essenziale in sistemi con bassi coefficienti di attrito F, ad esempio Direct Drive controllati in corrente: il basso smorzamento elettrico viene aumentato dall’azione di controllo; Claudio Melchiorri Schemi di controllo centralizzato 7 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo PD + compensazione di gravit` a V decresce fintanto che q˙ 6= 0. Si pu` o vedere che si raggiunge uno stato di equilibrio individuato dalla evoluzione di ˙ q˙ + Dq˙ + g(q) = g(q) + KP q ˜ − KD q˙ M(q)¨ q + C(q, q) ¨ = 0) si ha All’equilibrio (q˙ = q ˜=0 KP q e quindi q = qd il calcolo di g(q) deve essere perfetto, altrimenti la metodologia presentata non consente di trarre nessuna conclusione sulla stabilit` a (robustezza del controllore). Claudio Melchiorri Schemi di controllo centralizzato 8 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa Sistema MIMO non lineare descritto da ˙ q˙ + Dq˙ + g(q) = u M(q)¨ q + C(q, q) o, in breve ˙ =u M(q)¨ q + n(q, q) Si vuole determinare il controllo u in modo da avere un sistema MIMO lineare. Si ottiene questo risultato (linearizzazione globale) mediante una retroazione non lineare dello stato. Si pu` o dimostrare che tale controllo esiste in quanto: il modello `e lineare nel controllo u; la matrice M(q) `e invertibile per qualsiasi configurazione del manipolatore. Si sceglie il controllo u dipendente dallo stato del manipolatore: ˙ u = M(q)y + n(q, q) Claudio Melchiorri Schemi di controllo centralizzato 9 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa Con il controllo u ˙ u = M(q)y + n(q, q) si ottiene M¨ q + n = My + n e quindi ¨=y q dove y `e il nuovo ingresso del sistema. y ❄ u ✲ M(q) ✲ ❤ ✲ ✻ q Manip. ✛ s✲ ✲ s ❍ ❍ ✟ ✟ y q˙ ✲ R q˙ ✲ R ˙ ✛ n(q, q) Claudio Melchiorri Schemi di controllo centralizzato 10 / 15 q ✲ Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa Controllo a dinamica inversa: si deve calcolare la dinamica inversa del manipolatore. Complessivamente il sistema risulta lineare e disaccoppiato rispetto a y: yi influenza solamente qi (yi = q¨i ) Si deve ora determinare una legge di controllo y che stabilizzi il sistema. Scegliendo y = −KP q − KD q˙ + r ¨ = y si ottiene da q ¨ + KD q˙ + KP q = r q che, se le matrici KP , KD sono definite positive, risulta asintoticamente stabile. Claudio Melchiorri Schemi di controllo centralizzato 11 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa Se le matrici KP , KD vengono scelte diagonali, e definite da KP = diag {ωni2 } KD = diag {2δi ωni } si ottiene una dinamica per l’i-esima componente specificata dalla pulsazione naturale ωni e dal coefficiente di smorzamento δi . Per ottenere l’inseguimento di una data traiettoria qD (t), a questo punto si pu` o imporre ¨d + KD q˙ d + KP qd r=q e quindi complessivamente si ottiene la dinamica dell’errore di inseguimento: ¨ ˜ + KD q ˜˙ + KP q ˜=0 q ˜(0) 6= 0, q ˜˙ (0) 6= 0, e converge a zero con dinamica L’errore `e presente solo se q dipendente da KP , KD . Claudio Melchiorri Schemi di controllo centralizzato 12 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa ¨d q q˙ d ✲ ❤ ˜˙ q ✲ KD ✻ qd ˜ q ✲ ❤ ✲ KP ✻ ❅ ❄ u ❄y ✲ ❘ ❤ ❅ M(q) ✲ ❤ ✲ ✒ ✻ q Manip. ✛ ˙ ✛ n(q, q) s✲ ✲ s q˙ Si ha complessivamente un sistema con due anelli di controllo. Il primo `e basato su una retroazione non lineare dello stato e fornisce un modello lineare e disaccoppiato tra le variabili y e q (doppio integratore); il secondo `e lineare e stabilizza il sistema complessivo, ed il suo progetto `e facilitato in quanto la dinamica che deve stabilizzare risulta lineare e stazionaria; `e richiesto il calcolo di tutti i termini del modello dinamico ˙ D, g(q)) che deve essere svolto in tempo reale poich`e si ha (M(q), C(q, q), un controllo con retroazione dello stato; Claudio Melchiorri Schemi di controllo centralizzato 13 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa Ci sono problemi di carattere realizzativo: conoscenza esatta del modello del manipolatore (carichi, dinamiche non modellate, approssimazione nei parametri meccanici e geometrici, . . . ); calcolo in linea dei vari contributi dinamici; Si considerano solo i termini principali, e le compensazioni risultano imperfette. Necessit` a di tecniche di controllo che compensano modelli non precisi: Controllo robusto (sliding mode, ...); Controllo adattativo. Claudio Melchiorri Schemi di controllo centralizzato 14 / 15 Controllo PD + compensazione di gravit` a Controllo a dinamica inversa Controllo a dinamica inversa - Esempio p √ Sistema non lineare: (2 + sin q)¨ q + q˙ 3 1 − 0.5 cos q + 1 + q 2 = u Traiettoria desiderata: lineare con raccordi parabolici. kp = 100, kd = 14 Posizione Velocita‘ 100 20 80 15 60 10 40 5 20 0 0 1 2 3 5 6 7 8 9 10 0 0 1 2 3 Errore di Posizione -3 2 4 x 10 4 5 6 7 8 9 10 7 8 9 10 Errore di Velocita‘ 0.02 1 0 0 -1 -0.02 -2 -3 0 1 2 3 4 5 6 7 8 9 10 6 7 8 9 10 7 8 9 10 -0.04 0 1 2 3 4 5 6 Accelerazione 5 0 -5 0 1 2 3 4 5 Errore di Accelerazione 0.6 0.4 0.2 0 -0.2 0 1 2 3 4 5 6 Claudio Melchiorri Schemi di controllo centralizzato 15 / 15
© Copyright 2026 Paperzz