Appunti dalle lezioni di
Elettronica per le Radiofrequenze
Bruno Neri
1
Premessa
La presente edizione contiene, in forma di bozza, gli appunti tratti dal corso di Elettronica per le
Radiofrequenze da me tenuto per circa dieci anni nell’ambito del Corso di Laurea in Ingegneria
Elettronica. Si tratta di una formulazione preliminare che necessita certamente di una profonda
revisione sia dal punto di vista dei contenuti che da quello della veste editoriale. Ho preferito
procedere ad una stampa in questa forma non definitiva per due motivi principali: il primo consiste
nel fatto che desideravo onorare l’impegno preso con gli studenti dell’A.A. 2008/2009 a produrre
un testo, sia pure preliminare, prima dell’inizio della stagione degli esami; il secondo discende dal
fatto che il corso verrà tenuto nella forma attuale ancora solo per un anno a causa dell’avvento del
nuovo ordinamento dei Corsi di Studi in Ingegneria Elettronica che nell’AA 2010/2011 si estenderà
anche alla Laurea Magistrale. Pertanto: ora o mai più. E allora, in attesa di riunire e riorganizzare
il materiale didattico prodotto in questi anni per i corsi di Elettronica per le Radiofrequenze,
Circuiti Integrati a Microonde, Elettronica dei Sistemi Mobili di Telecomunicazione al fine di
renderlo idoneo e funzionale al nuovo ordinamento, mi è sembrato opportuno cominciare a dargli
forma “leggibile” per gli studenti sia per avere una prima base su cui lavorare, sia per accogliere
suggerimenti, critiche, richieste di modifiche e integrazioni. Questi appunti rappresentano, quindi,
il primo passo di questo lavoro che richiederà certamente diversi mesi per essere condotto a
termine. Invito, pertanto, tutti coloro che, trovandosi a leggere queste poche pagine, lo ritenessero
opportuno, a farmi pervenire le loro critiche, osservazioni e segnalazioni.
Un ringraziamento ed un riconoscimento particolare sono dovuti a due ex studenti del corso che mi
hanno dato una mano riversando in formato elettronico con attenzione e competenza gli appunti
presi a lezione: l’Ing. Martina Mincica per i Capitoli 1, 2, 3, 4, 6 e l’Ing. Alessandro Fonte per il
Capitolo 5.
Bruno Neri
2
Introduzione
I sistemi a radiofrequenza, tipicamente sistemi di ricetrasmissione dell’informazione, operano in un
campo di frequenze molto esteso (oltre 6 decadi) che va da alcune decine di Kilohertz (KHz) fino a
diverse decine di Gigahertz (GHz). L’allocazione delle diverse applicazioni e servizi in un
particolare range di frequenza, oltre che da motivi di carattere “storico”, dipende, ovviamente, da
considerazioni di carattere tecnologico. Mentre le applicazioni più datate, come, ad esempio, la
radiodiffusione in modulazione di ampiezza, hanno occupato fin dall’inizio, anche per motivi legati
alla disponibilità di componentistica attiva e passiva, il range di frequenze più basso (fino a qualche
decina di Megahertz (MHz)) le applicazioni più recenti (telefonia mobile, Wireless Local Area
Network (WLAN)) occupano la parte alta del range delle radiofrequenze (dal GHz in su).
Applicazioni ormai in stato avanzato di studio e sperimentazione (come , ad esempio, i radar
anticollisione per autoveicoli) andranno ad occupare intervalli di frequenza appositamente allocati
nel range delle decine di GHz e presto conosceranno una diffusione capillare simile a quella che ha
caratterizzato in questi anni la telefonia cellulare. Tutto ciò è reso possibile dagli straordinari
sviluppi che ha subito la tecnologia dei semiconduttori (silicio in particolare) dall’inizio degli anni
‘90 e che ha portato, in pochissimo tempo, a disporre di componenti attivi integrati a basso costo
(bipolari e MOS) con frequenze di transizione superiori al centinaio di GHz. E’ questo certamente
uno dei fenomeni che più pesantemente hanno caratterizzato l’evoluzione della tecnologia e, di
riscontro, del costume nell’ultima decade. E’ nata e si è rapidamente ampliata una nuova branca
dell’elettronica e delle telecomunicazioni che viene ormai universalmente individuata con un
neologismo entrato di forza in quasi tutte le lingue “WIRELESS”.
Tali sistemi hanno la funzione di trasferire a distanza, in modalità wireless, ovvero “senza fili”,
l’informazione, codificata attraverso una grandezza fisica s(t) variabile nel tempo.
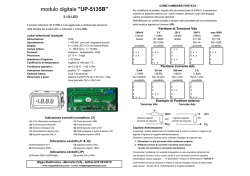
Il campo delle radiofrequenze è quello delle frequenze di interesse per i collegamenti radio e si
estende da qualche decina di kilohertz fino alle centinaia di gigahertz. La parte superiore di questo
intervallo di frequenze, tipicamente quella all’interno della quale le lunghezze d’onda sono
confrontabili con le dimensioni dei componenti e dei circuiti utilizzati, è quella delle Microonde.
Con la riduzione e la miniaturizzazione l’estremo inferiore del campo delle microonde si è spostato
negli anni da qualche centinaio di megahertz (lunghezza d’onda nel range dei metri) a qualche
gigahertz (lunghezza d’onda di qualche decina di centimetri). In testi di qualche anno fa si parla di
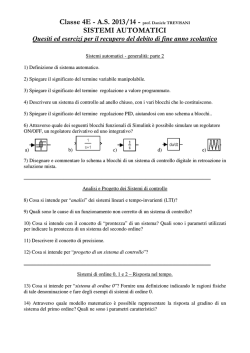
microonde già al di sopra dei 300MHz. In Fig. 1.1a è rappresentato l’asse delle frequenze con la
3
denominazione convenzionale delle diverse gamme di frequenza, mentre in Fig. 1.1b sono
rappresentate le lunghezze d’onda corrispondenti.
30KHz
300KHz
3MHz
30MHz
300MHz
3GHz
30GHz
f
LF
MF
HF
VHF
UHF
(SHF)
(EHF)
Fig. 1a
1Km
λ
100m
10m
1m
10cm
1cm
Fig. 1b
LF:
low-frequency
MF: medium-frequency
HF:
high-frequency
VHF: very high-frequency
UHF: ultra high-frequency
SHF: super high-frequency
EHF: extra high-frequency
Come è noto la frequenza f e la lunghezza d’onda λ sono legate dalla relazione λ =
v
dove v è la
f
velocità della luce nel mezzo di propagazione del fenomeno. Considerando onde che viaggiano nel
vuoto (v = 3·108 m/s), otteniamo che a 300 MHz corrispondono onde con λ = 1m ecc. come
rappresentato in Fig. 1.1b
Fino agli anni ’60 le dimensioni tipiche dei circuiti e dei componenti elettronici erano di qualche
centimetro perciò si parlava di microonde per λ< 1 m. Al giorno d’oggi le dimensioni dei dispositivi
si sono molto ridotte. Per dispositivi integrati le zone attive sono addirittura dell’ordine del µm.
Comunque le dimensioni di un circuito integrato dipendono in definitiva dal package che sarà di
qualche mm fino a qualche cm. Per questo motivo si comincia a parlare di microonde con frequenze
superiori ad alcuni GHz.
4
Obiettivo del Corso di Elettronica per la Radiofrequenze è la descrizione dei principi di
funzionamento, dei circuiti e delle architetture, dei sistemi di radiocomunicazione. I sistemi di
radiocomunicazione servono, come già detto, a trasferire un’informazione a distanza senza fili.
L’informazione, nella sua accezione più generale, è rappresentata da una grandezza fisica s(t) che
varia in funzione del tempo. Tale grandezza, prima di essere trasmessa a distanza mediante le onde
elettromagnetiche, deve subire una serie di elaborazioni che la rendono idonea alla trasmissione.
Innanzi tutto è necessario trasformare la grandezza fisica in un segnale elettrico. Questa funzione
viene assolta dal blocco denominato trasduttore.
s(t)
Trasduttore
e(t)
Tipicamente il segnale elettrico e(t) in banda base è contenuto in un range frequenziale che va da da
qualche Hz a qualche MHz. Un segnale a queste frequenze non è adatto ad essere trasmesso a
distanza in quanto sarebbero necessarie antenne di dimensioni paragonabili o maggiori alla
lunghezza d’onda e quindi di diverse decine di metri. Il segnale elettrico viene perciò “traslato” a
frequenze maggiori “mescolandolo” con un segnale a radiofrequenza del quale modulerà la fase,
l’ampiezza o ambedue. Questa operazione viene effettuata da un sottosistema denominato
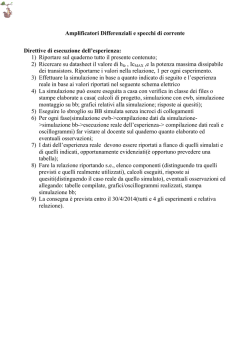
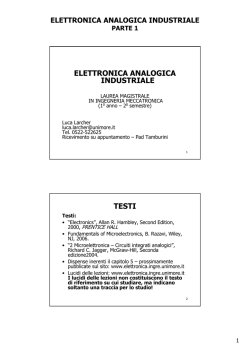
“modulatore”. Prima di arrivare all’antenna che trasmetterà il segnale modulato è necessario
amplificarlo adeguatamente. A seconda delle applicazioni il segnale trasmesso avrà una potenza che
potrà variare da poche decine di milliwatt fino a diverse centinaia di kilowatt ed oltre. In Fig. 1.2 è
rappresentata questa parte del trasmettitore. L’oscillatore locale genera la portante a radiofrequenza
da “mescolare” al segnale in banda base.
mixer
e(t)
Modulatore
antenna TX
Power
Amplifier
Oscillatore
Locale
Fig. 2
5
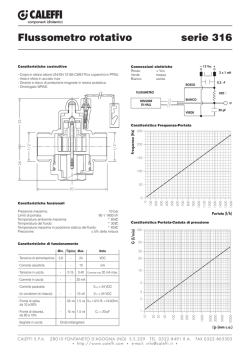
antenna RX
Il segnale trasmesso raggiunge il ricevitore con una potenza molto inferiore a quella di trasmissione
a causa dell’attenuazione geometrica e delle perdite nel mezzo di trasmissione. In alcuni casi il
segnale ricevuto avrà una potenza di poche decine di femtowatt (1fW= 10-15 W): tanto basta ad
ottenere una ricezione intelligibile, ovvero ad essere in grado di ricostruire l’informazione trasmessa
con una probabilità di errore accettabile.
L’antenna si presenta come un generatore di segnale (il segnale ricevuto) con una impedenza
interna (l’impedenza di antenna) in ingresso ad un amplificatore a basso rumore.
Il primo blocco attivo in ricezione è perciò un amplificatore a radiofrequenza a basso rumore.
Il segnale amplificato, che è ancora un segnale modulato a radiofrequenza, è adesso abbastanza
“robusto” da essere elaborato dal blocco successivo che ha la funzione di riportarlo in banda-base
(eventualmente dopo una o più traslazioni in basso in frequenza). Questa operazione avviene
all’interno del demodulatore in Fig. 1.3
e’(t)
Demodulatore
O.L
.
Fig. 3
Dopo un’elaborazione in banda-base il segnale può esser eventualmente riportato nella forma della
grandezza di origine.
Elaborazione
banda-base
s’(t)
Trasduttore
Fig. 4
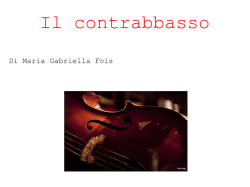
Nel sistema di radiocomunicazione vi saranno parti a radiofrequenza ed altre in banda base (queste
ultime, in genere, dedicate all’elaborazione digitale del segnale).
In questo corso ci occuperemo esclusivamente delle parti a radiofrequenza e di quelle che
immediatamente le precedono e seguono nella catena di rice-trasmissione, ovvero i modulatori e i
demodulatori, come indicato in Fig. 5.
6
s(t)
TRASD.
MOD
PA
LNA
Radiofrequenze
Fig. 5
7
DEMOD
Elab
TRASD
Capitolo 1
Amplificatori a radiofrequenza
Il primo blocco attivo di un sistema di ricezione è l’amplificatore di antenna che, essendo sempre un
amplificatore a basso rumore, viene solitamente indicato con l’acronimo LNA (Low Noise
Amplifier). Si tratta di un amplificatore che lavora con un range dinamico (rapporto tra la potenza
del massimo segnale amplificabile con basse distorsioni e quella del minimo segnale intelligibile)
molto ampio (anche maggiore di 100 dB) introducendo, al contempo, il minor contributo possibile
al rumore.
La principale caratteristica di un amplificatore è la capacità di introdurre un guadagno di potenza
significativamente maggiore di 1. Gli amplificatori a radiofrequenza sono caratterizzati da guadagni
di potenza generalmente compresi tra 15 e 25 dB.
1.1 Caratterizzazione dei quadripoli
In generale può essere visto come un quadripolo (sistema a due porte), di fatto un terminale di
ingresso e uno di uscita sono spesso collegati a massa quindi si riduce ad un tripolo in cui la porta di
ingresso e quella di uscita hanno un nodo a comune.
P(t)
vi(t)
LNA
vu(t)
Power
R
P(t ) =
V 2 (t )
R
Si può dimostrare che bastano 4 parametri per caratterizzare un tripolo. Un esempio tipico è la
caratterizzazione mediante i parametri h definiti dal sistema di equazioni:
8
v1 = hi ⋅ i1 + hr ⋅ v 2
i2 = h f ⋅ i1 + ho ⋅ v 2
i1
i2
+
v1
+
v2
_
_
matrice a
parametri
ibridi
hi
H =
h f
I parametri ha sono ricavabili dalle seguenti definizioni operative
hi =
hf =
v1
i1
= [Ω]
hr =
v2 = 0
i2
v2
: adimensionale
v2 = 0
ho =
v1
v2
i2
v2
: adimensionale
i1 = 0
= [Ω-1]
i1 = 0
Questi parametri sono detti ibridi perché non hanno tutti la stessa dimensione. Per misurarli si
devono realizzare sia cortocircuiti (v = 0) che circuiti aperti (i = 0).
I set di parametri possibili sono molteplici : h, z, y, s, ABCD. La scelta si fa sia in base alle modalità
operative di misura, che possono risultare più o meno “comode” a seconda della frequenza di
lavoro, sia in base alla potenzialità messe a disposizione del progettista da ciascun set di parametri.
Anche queste potenzialità dipendono dalla frequenza e dalla specificità degli obiettivi che il
progetto deve conseguire.
Ad esempio un circuito aperto in bassa frequenza è facilmente ottenibile “tagliando” un filo di
connessione o una pista. In realtà, i due monconi a distanza limitata tra loro rappresentano una
capacità, ovvero una reattanza che, ad alte frequenze, fa si che i due fili non possono più essere
considerati un circuito aperto.
1pF @ 1GHz costituisce una reattanza pari a
1
≅ 160Ω
2π ⋅ 10 9 ⋅ 10 −12
Operativamente in alta frequenza un circuito aperto è difficilmente realizzabile.
9
hr
ho
Un circuito chiuso può a sua volta introdurre un’induttanza. Qualche mm di filo corrisponde a
un’induttanza dell’ordine del nano Henry, ovvero una reattanza di alcuni ohm nel range delle
microonde.
1nH @ 1GHz costituisce una reattanza pari a 2π ⋅ 10 9 ⋅ 10 −9 ≅ 6.28Ω
A frequenze molto elevate anche i cortocircuiti diventano difficilmente realizzabili.
Nel campo delle radiofrequenze il set di parametri più utilizzato in passato è stato quello dei
parametri Y che, negli ultimi anni, ha ceduto il passo ad un altro set di parametri: i parametri S
utilizzati estensivamente nel campo delle microonde. Per facilitare l’approccio ad una disciplina
abbastanza specifica come quella della progettazione a radiofrequenza e microonde, si utilizzerà nel
seguito il set di parametri Y che, per la sua “somiglianza” con altri set di parametri utilizzati in corsi
di base (parametri h e Z, per esempio) permette una più immediata comprensione e facilità di
utilizzo.
1.1.1 Parametri Y
I parametri Y mettono in relazione le correnti di ingresso e uscita con le rispettive tensioni.
i1 = y I ⋅ v1 + y R ⋅ v 2
i2 = y F ⋅ v1 + y O ⋅ v 2
y
Y = I
yF
yR
: [Ω-1] si tratta di ammettenze
y O
Definizioni operative:
yI =
yF =
i1
v1
i2
v1
yR =
v2 = 0
yO =
v2 =0
i1
v2
v1 = 0
i2
v2
v1 = 0
Per misurarli si realizzano solo cortocircuiti.
I parametri Y sono i duali dei parametri Z.
v1 = z I ⋅ i1 + z R ⋅ i 2
v 2 = z F ⋅ i1 + z O ⋅ i2
z
Z= I
zF
zR
: [Ω] si tratta di impedenze
z O
In questo corso ci concentreremo sull’uso dei parametri Y.
10
I pedici stanno per:
I: input
relativo al rapporto tra grandezze in ingresso
O: output
relativo al rapporto tra grandezze in uscita
F: forward relativo all’effetto dell’ingresso sull’uscita
R: reverse
relativo all’effetto dell’uscita sull’ingresso
Esempi di calcolo di parametri Y
Nel seguito sono riportati alcuni esempi di calcolo di parametri Y.
Es:
i1
Yx
i2
+
v1
-
+
v2
-
Yx
i1
yI =
yF =
i1
v1
v2 = 0
i2
v1
v2 =0
+
v1
-
=Yx
=-Yx
i2
(i 2 = −i1 v
Il quadripolo è simmetrico.
v2=0
2 =0
)
yo=yi yr=yf
Il fatto che il quadripolo sia simmetrico equivale a dire che le due porte possono essere scambiate.
Cosa diversa è l’essere la matrice delle ammettenze simmetrica rispetto alla diagonale principale.
Ciò accade per tutte le reti reciproche: lo sono certamente le reti costituite da resistenze, induttanze,
capacità, mutue e linee di trasmissione. La presenza di componenti attivi (transistors) in genere
dissimmetrizza la matrice.
Proprietà di quadripoli caratterizzati da parametri Y
Due quadripoli collegati in parallelo e caratterizzati dalle proprie matrici di parametri Y, hanno una
matrice Y complessiva data dalla somma delle due singole.
11
I1A
+
V1A
I2A
+
V2A
YA
_
_
I1B
+
V1B
I2B
+
V2B
YB
_
_
I1A
YA
YRA
YOA
I 1B = YIB ⋅ V1B + YRB ⋅ V2 B
I 2 B = YFB ⋅ V1B + YOB ⋅ V2 B
Y
YB = IB
YFB
YRB
YOB
+
V2A
-
-
I1B
+
V1
-
Y
Y A = IA
YFA
I2A
+
V1A
I1
I 1 A = YIA ⋅ V1 A + YRA ⋅ V2 A
I 2 A = YFA ⋅ V1 A + YOA ⋅ V2 A
I2B
+
V1B
YB
-
I 1 = I 1 A + I 1B
I 2 = I 2 A + I 2B
V1 = V1 A = V1B
I2
+
V2B
I 1 = YI ⋅ V1 + YR ⋅ V2
I 2 = YF ⋅ V1 + YO ⋅ V2
+
V2
-
-
YRA + YRB YI
Y +Y
YA = IA IB
=
YFA + YFB YOA + YOB YF
YR
YO
V2 = V2 A = V2 B
Come esempio di applicazione di quanto appena visto, consideriamo un quadripolo con reazione di
tensione parallelo. Il collegamento dell’ammettenza di reazione Yx equivale a porre in parallelo al
quadripolo di partenza un quadripolo caratterizzato dai seguenti parametri Y
YIx = Y X = YOx
YFx = −Y X = YRx
12
Yx
I1
I2
+
V1
-
+
V2
-
Yp
Pertanto i parametri Y del quadripolo risultante saranno:
YItot = YIp + Y X
YFtot = YFp − Y X
YRtot = YRp − Y X
YOtot = YOp + Y X
Un quadripolo è detto unilaterale se YR=0
I 1 = YI ⋅ V1 + YR ⋅ V2
YR =
I1
V1=0
I1
V2
misura l’effetto dell’uscita V2 sull’ingresso I1
V1 = 0
I2
+
V2
-
YR=0
I1=0
Le equazioni che descrivono il funzionamento di un quadripolo secondo i parametri Y sono:
I 1 = YI ⋅ V1 + YR ⋅ V2
I 2 = YF ⋅ V1 + YO ⋅ V2
13
Il circuito equivalente a parametri Y è il seguente:
I2
I1
+
YI
V1
+
YRV2
YO
YFV1
-
V2
-
Su questo circuito equivalente è possibile calcolare alcune funzioni di trasferimento quali, ad
V2
V1
esempio, il Guadagno di tensione : AV =
Poichè :
V2 = −
I2
Y ⋅V
=− F 1
YL
YO + YL
AV = −
YF
YO + YL
Osservazione: il guadagno di tensione risulta dipendere dal carico e non dall’impedenza di sorgente.
La la sorgente di segnale in ingresso è schematizzabile in 2 modi:
ZS
+
+
IS
YS
+
VS
-
V1
-
Norton
V1
Thevenin
Le ammettenze di ingresso YIN e di uscita YOUT sono facilmente calcolabili. L’ammettenza di
ingresso : YIN =
I 1 YI ⋅ V1 + YR ⋅ V2
Y ⋅Y
=
= YI − R F dipende dal carico YL
V1
V1
YO + YL
L’ammettenza d’uscita : YOUT = YO −
YR ⋅ YF
dipende dall’ammettenza di sorgente YS.
YI + YS
14
YL
Se il quadripolo è unidirezionale (YR=0)
YIN=YI ; YOUT=YO
In radiofrequenza non si può trascurare la YR , come spesso accede alle basse frequenze, perciò i
quadripoli non sono mai unidirezionali.
La presenza di una YR≠0 rende di fatto il sistema reazionato in quanto lìuscita risente dell’effetto
dell’ingresso e viceversa. Questo può determinare l’instabilità cioè l’instaurarsi di oscillazioni
spontanee in assenza di qualunque sollecitazione.
E’ possibile calcolare il guadagno di corrente : AI =
I2
YF ⋅ YL
=
I 1 YI ⋅ (YO + YL ) − YR ⋅ YF
Vediamo come si può unilateralizzare un quadripolo, ovvero annullare la reazione dell’uscita
sull’ingresso. Per ottenere tale risultato si può reazionare il quadripolo con una ammettenza YX al
fine di ottenere un nuovo quadripolo caratterizzato dai seguenti parametri Y:
YX
YIt = YI + YX
YOt = YO + YX
YFt = YF − YX
Q
YRt = YR − Y X
.
Se YX=YR → YRt=0
Questo non è sempre possibile utilizzando un bipolo passivo al posto di Yx. In tal caso, infatti, Yx
avrà parte reale positiva e l’unilateralizzazione sarà possibile solo se YR ha parte reale positiva.
Se GR<0 (quadripolo con elementi attivi) → non è possibile unilateralizzare il quadripolo con la
tecnica prima descritta.
Osservazione: si noti che collegando tra ingresso e uscita l’ammettenza YX cambia non solo il
valore di YRt, ma anche quello dei rimanenti parametri Y.
1.2 Guadagni di Potenza
A radiofrequenza si definiscono diversi tipi di guadagni di potenza secondo quanto descritto nel
seguito:
15
YS
+
VS
-
YL=GL+jBL
Guadagno operativo di potenza : G P =
PL
Pin
Guadagno di potenza disponibile : G A =
PAout
PAin
Dove PL rappresenta la potenza media sul carico, Pin quella in ingresso al quadripolo, PAout quella
disponibile sulla sua uscita e PAin quella disponibile del generatore di segnale.
La massima potenza disponibile è la massima potenza che un generatore con impedenza interna a
parte reale positiva può fornire ad un carico di valore opportuno. Dato un generatore VG con
impedenza interna ZG, se realizziamo l’adattamento complesso coniugato ZL=ZG* otteniamo il
massimo trasferimento di potenza dal generatore al
ZG
+
VG
-
carico. Questo vale solo se Re{ZG}>0. In caso
contrario la potenza trasferibile al carico non è
ZL
superiormente
limitata
dell’impedenza di
e
scegliendo
un
valore
carico “prossimo” a (- ZG) è
possibile, in linea di principio, ottenere potenze in
uscita “grandi quanto si vuole”. Ciò a scapito delle
garanzie di stabilità del sistema che può, in tal caso, presentare le condizioni per l’innesco di
oscillazioni secondo quanto indicato dalle condizioni di Barkhausen all’innesco.
Se (VG, ZG ) è l’equivalente di Thevenin di una rete attiva, ZG può essere a parte reale negativa,
ovvero:
Z G = − RG + jX G
In questo caso se scegliamo Z L = − Z G = RG − jX G
si ottiene
IG =
VG
ZG + Z L
∞ e
la potenza dissipata su ZL risulterebbe infinita.
Perciò la coincidenza tra potenza disponibile e massima potenza erogabile vale solo per generatori
con impedenza interna a parte reale positiva.
16
Nel seguito, a prescindere dal segno della parte reale dell’impedenza interna, indicheremo col
termine “potenza disponibile” la potenza erogata su un carico ZL=ZG*.
La potenza disponibile in ingresso è quella del generatore di segnale. Si possono ripetere,
ovviamente, le stesse considerazioni fatte in precedenza.
In particolare se, detta ZIN l’impedenza di ingresso del quadripolo, risulta
Z IN = Z S*
con
Z S = R S + jX S
Z IN = RS − jX S
allora il generatore di segnale trasferisce in ingresso al quadripolo una potenza pari a quella
disponibile del generatore, PAin, che può essere calcolata come segue:
ZS
+
VS
-
IS =
1
N.B. RS = ℜ{Z S } = ℜ
YS
V2
V 2 = M valore efficace di VS
2
V2
V2
I M = M2 = 2 M 2
Z
R +X
ZIN
VSM
V
= SM
RS + jX S + RS − jX S 2 RS
PAin =
2
RS ⋅ I S2 V SM
=
2
8 RS
La potenza disponibile in uscita PAout si calcola sull’equivalente di Thevenin dell’uscita
ZOUTh
+
VOUTh
-
ZL
2
VOUTh
PAout =
coincide con la massima potenza erogabile solo se Re{ZOUTh}>0
8 ROUTh
P
Il guadagno di potenza disponibile G A = Aout è un rapporto di potenze virtuali. PAout coincide con
PAin
la potenza effettiva sul carico solo se ZL=ZOUT*. In generale le potenze effettive sono minori di
quelle disponibili.
17
Non è detto che sia sempre possibile adattare contemporaneamente ingresso e uscita del quadripolo,
infatti il sistema:
YIN (YL ) = YS*
*
YOUT (YS ) = YL
Può non avere soluzione.
Il terzo tipo di guadagno che si definisce è il Guadagno di trasduttore : .
GT =
PL
PAin
Esso rappresenta un rapporto tra un flusso di potenza reale (PL) ed uno virtuale.
Poichè PL = GT ⋅ PAin , GT è quella quantità che moltiplicata per la potenza disponibile dà la potenza
sul carico, ovvero, note le caratteristiche del generatore di segnale ed il valore di GT è
immediatamente possibile calcolare la potenza sul carico.
Nel seguito ricaveremo, a partire dalla definizione, l’espressione del GP.
GP =
PL
PIN
1 1
N.B. RL = ℜ ≠
YL G L
YL
+
+
V1
-
+
V2
-
BIN
1
G IN
V12M
PIN =
G IN
2
1
GL
2
GL
= AV
G IN
2
GL
YF
=
G IN
YO + YL
2
GL
G IN
Discutiamo il segno di GP:
-
PL solitamente è positivo perché si fa riferimento a carichi passivi
-
PIN può anche essere negativo (flusso di potenza uscente) se RIN<0
→ GP ha lo stesso segno di GIN
18
RL
V2
-
V22M
I 22M
PL =
GL =
RL
2
2
Quindi :
V
G P = 2 M
V1M
BL
XL
YF
GP =
YO + YL
2
GL
G IN
dipende solo da YL quindi è una funzione della terminazione d’uscita : GP (YL)
Con opportune elaborazioni, a partire dalla definizioni possiamo calcolare il guadagno di potenza
disponibile e quello di trasduttore. Si ottiene:
2
GA =
YF G S
{
ℜ (YO YS + YO YI − YR YF )(YI + YS )
*
}
dove YS = GS + jXS ammettenza interna del generatore di segnale
GT =
4G S G L YF
2
(YS + YI )(YO + YL ) − YRYF
2
Osservazioni: - GA non dipende dal carico ma solo dalla sorgente GA (YS)
- GT dipende sia dal carico che dalla sorgente GT (YS,YL)
Con impedenze di carico e di sorgente passive e impedenze di ingresso e di uscita a parte reale
positiva, risulta:
-
PAout ≥ PL
GT ≤ GA
-
PAin ≥ PIN
GT ≤ GP
19
1.3 Stabilità incondizionata
Definizioni e criteri:
1) Un sistema è stabile se a fronte di una sollecitazione finita in durata e ampiezza genera
un’uscita fnita in ampiezza e durata.
2) Un oscillatore è un sistema in grado di produrre una forma d’onda periodica in assenza di
sollecitazioni.
3) Il criterio di Barkhausen dice che, se esiste una frequenza f0 alla quale:
βA
f = f0
∠β A
=1
f = f0
=0
βA f = f = 1
0
Allora il sistema è in grado di auto sostenere, in assenza di sollecitazioni, una oscillazione a
frequenza f0.
4) Se le condizioni di Barkhausen all’innesco sono verificate, ovvero se:
βA
f = f0
∠β A
≥1
f = f0
=0
Allora nel sistema si innesca una oscillazione a frequenza iniziale f0 che si auto esalta.
Se per un dato quadripolo ad una frequenza f0 collegando in ingresso e uscita tutte le possibili
coppie di impedenze a parte reale positiva non si ottengono mai le condizioni di BArkhausen
all’innesco, allora si dice che il quadripolo è incondizionatamente stabile alla frequenza f0. Se esiste
almeno una coppia di impedenze in corrispondenza delle quali si verificano tali condizioni, allora il
quadripolo si dice potenzialmente instabile. Un quadripolo potenzialmente instabile ha guadagno di
trasduttore non superiormente limitato.
Si può dimostrare che il verificarsi delle condizioni sulle impedenze di ingresso e di uscita riportate
nel seguito coincide con l’incondizionata stabilità.
Definizione equivalente di stabilità incondizionata:
∀YS : ℜ{YS } ≥ 0 ⇒ YOUT : ℜ{YOUT } > 0
∀YL : ℜ{YL } ≥ 0 ⇒ YIN : ℜ{YIN } > 0
20
Lo dimostriamo solo in un senso, ovvero dimostriamo che il verificarsi delle condizioni suddette è necessario
alla stabilità incondizionata. Ovvero, dimostriamo che se una di queste due condizioni non si verifica il
quadripolo è potenzialmente instabile e può essere utilizzato per realizzare un oscillatore.
Se esiste
YS : ℜ{YOUT } < 0 ⇒ ℜ{Z OUT } = ROUT < 0
ZOUTh
+
ZL
VOUTh
YS
-
Scegliendo ZL= -ZOUTh con
si
ZL
RL= -ROUTh > 0
realizza una maglia d’uscita con impedenza nulla e, pertanto, IOUT → ∞. Ovvero, a fronte di una
sollecitazione finita, alla frequenza f0, si ottine una risposta non finita, oppure, detto in altri termini,
la corrente nella maglia può essere diversa da zero al tendere a zero della sollecitazione. Si ottiene,
pertanto, un oscillatore a frequenza f0 .
.
I OUT =
VOUTh
Z OUTh + Z L
- per VOUTh → 0 IOUT è finita
- per VOUTh ≠ 0 e finita IOUT → ∞
.
Calcoliamo adesso il βA di un quadripolo caratterizzato a parametri Y, utilizzando il teorema di
scomposizione.
YS
YI
YRV2
YFV1
YO
YL
Per prima cosa dobbiamo individuare un taglio e, quindi, un anello di reazione. Il quadripolo è
intrinsecamente reazionato tramite la YR la quale riporta in ingresso l’effetto dell’uscita.
21
IP
+
YS
YI
V1
+
YR V2
YFV1
+
YP
VR
-
-
+
VP
-
YO
YL
V2
-
Con il taglio effettuato individuiamo la reazione.
βA =
YP =
VR
VP
1
ZP
VR = −
βA =
A=
VS = 0
ZP =
VP
IP
VU
VP
β=
VS = 0
VR
VU
VS = 0
1
1 ρ
=
+ (1 − β A)
Z P Zi α
V
ρ = 0 → Z P = Zi = P
IP
YP = YO + YL
VS = 0
YF V1
YF
=−
YO + YL
YO + YL
YRV 2
−
YS + YI
V2 = V P
YF YR
dipende dal carico YL a dal generatore di segnale YS
(YI + YS )(YO + YL )
verifiche : - quadripolo unilaterale (YR=0) : βA=0 non c’è reazione
- cortocircuitando l’uscita (V2=0) : βA=0 (YL → ∞)
- cortocircuitando l’ingresso l’ingresso (V1=0) : βA=0 (YS → ∞)
Il βA ci permette di analizzare in termini analitici le condizioni di Barkhausen. Si tratta di
verificare se esiste una coppia YS,YL che soddisfa il sistema:
β A(YS , YL ) = R > 1
∠β A = 0
β A(YS , YL ) = R
R ∈ℜ >1
Dal sistema, mediante elaborazioni di una certa complessità che in questa sede non vengono
riportate, si ricava un criterio basato sul cosiddetto Fattore di Stern K definito nel seguito.
Se
K=
2( g I + g S )( g O + g L )
>1⇒
ℜ{YR YF } + YR YF
Il sistema NON ha soluzione, ovvero, fissati due valori di gS e gL che rendono K>1 , non esiste
soluzione al sistema qualunque sia la coppia di bS e bL dove:
YS = g S + jbS
YL = g L + jbL
22
In altri termini, una volta trovate gS,gL che rendono K>1, anche variando le parti immaginarie le
condizioni di Barkhausen all’innesco alla frequenza f0 non potranno essere verificate.
Osservazione: se la condizione sul K vale per una data coppia di valori di gS,gL vale sicuramente
anche per valori maggiori, essendo gi>0 e go>0.
Questo perchè partiamo dal presupposto che go>0, gi>0 altrimenti il quadripolo sarebbe
potenzialmente instabile. Infatti si otterrebbe:
YIN = YI −
Y R YF
YO + YL
scegliendo YL→ ∞ (corto circuito) => YIN=YI (con parte reale negativa).
Scegliendo YS=-YI (con parte reale positiva) si otterrebbe una maglia ad impedenza nulla con
ovvie conseguenze sulla stabilità, ovvero:
YL → ∞
verifica le condizioni di Barkhausen.
YS = −YI
K è una funzione crescente di gS e gL. Il denominatore è la somma di una parte reale e del modulo
dello stesso vettore che è maggiore sia della parte reale che di quella immaginaria. Perciò il
denominatore è sicuramente positivo.
La condizione sul fattore di Stern è molto utile alle radiofrequenze. Gli accoppiamenti capacitivi e
induttivi spuri possono far variare le parti reattive delle impedenze di sorgente e di carico e generare
oscillazioni, ma questo non accade se K>1.
K>1 non equivale a dire che il quadripolo è incondizionatamente stabile perché si riferisce ad una
particolare coppia (gS,gL).
Se calcoliamo K nella situazione peggiore gS=0, gL=0 e verifichiamo che esso risulta positivo,
sicuramente continuerà ad esserlo per ogni coppia gS>0, gL>0
ovvero il quadripolo risulterà
incondizionatamente stabile
In altri termini, i quadripoli che verificano la condizione:
2g I gO
> 1 sono certamente Incondizionatamente Stabili
ℜ{YR YF } + YR YF
2 g I g O > ℜ{YR YF } + YR YF
YR YF > 2 g I g O − ℜ{YR YF }
il segno della disuguaglianza non cambia
se il termine a destra è positivo si ottiene la seguente relazione che
definisce anche il cosiddetto Fattore di Linvill :
C=
YR YF
2 g I g O − ℜ{YR YF }
<1
0 ≤ C < 1 ⇒ quadripolo Incondizionatamente stabile!
23
Un quadripolo è incondizionatamente stabile se e solo se il fattore di Linvill è compreso tra 0 e 1.
Caso particolare : YR=0 → C=0 quadripolo unilaterale
situazione di marginale stabilità,va trattata separatamente
gI > 0
si controlla se
⇒ I .S .
gO > 0
Il fattore di Stern dipende da gS e gL quindi non può essere fornito dal costruttore il quale, in genere,
fornisce il fattore di Linvill al variare della frequenza. Il range di frequenze in cui C è compreso tra
0 e 1 è il range di frequenze in cui il quadripolo è caratterizzato da Incondizionata Stabilità (IS).
1.3.1 Effetto della stabilità incondizionata sui guadagni
Dalla IS discende che, qualunque sia la coppia di impedenze di carico e di sorgente, purchè a parte
reale positiva, risulta:
ℜ{YIN } > 0
ℜ{YOUT } > 0
Pertanto:
GP > 0
GA > 0
GT > 0
GT ≤ G P
Le condizioni :
sono certamente verificate
GT ≤ G A
E’ possibile dimostrare che, se un quadripolo è incondizionatamente stabile, è possibile realizzare
contemporaneamente l’adattamento complesso coniugato in ingresso e in uscita, ovvero esiste (ed è
unica) la soluzione del sistema di equazioni:
YIN (YL ) = YS*
*
YOUT (YS ) = YL
Se YR=0 (quadripolo unilaterale) il sistema ha sicuramente soluzione:
YS = YI*
*
YL = YO
Se il quadripolo non è I.S. il sistema non ha soluzione.
24
E’ anche possibile dimostrare che i valori di YS e YL soluzioni del sistema coincidono con il punto
di massimo della funzione GT(YS, YL), ovvero sono i valori di ammettenza di sorgente e di carico
che massimizzano il guadagno di trasduttore.
Detto ancora in altri termini; se si studia GT come una funzione di 4 variabili e limitatamente al caso
gL>0, gS>0, la ricerca del massimo ha soluzione e la soluzione è unica se e solo se il quadripolo è
incondizionatamente stabile, ovvero:
∃(YSopt ; YLopt ) : GT (YSopt ; YLopt ) = GT max ⇔ il quadripolo è I.S.
1.3.2 Ricerca del massimo guadagno
Il problema di ricerca del massimo è prettamente analitico e non lo trattiamo nel dettaglio.
Le ammettenze ottime di carico e sorgente, ovvero quelle che massimizzano GT, sono anche quelle
che realizzano l’adattamento complesso coniugato in ingresso e uscita.
*
YIN (YLopt ) = YSopt
*
YOUT (YSopt ) = YLopt
Si dimostra che se YSopt = G Sopt + jB Sopt , YLopt = G Lopt + jB Lopt allora:
[2 g I g O − ℜ{YRYF }]2 − YR YF
G Sopt =
2
2gO
B Sopt = −bI +
ℑ{YR YF }
2gO
G Lopt = G Sopt
gO
gI
B Lopt = −bO +
ℑ{YR YF }
2g I
Se sostituiamo YSopt e YLopt nella formula del GT si ricava il GTmax.
GT max =
YF
2 g I g O − ℜ{YR YF } +
2
[2 g I g O − ℜ{YR YF }]2 − YRYF
nel caso in cui : -YR=0 → GT =
4G S G L YF
2
(YS + YI )(YO + YL ) 2
-gi,go>0 → I.S.
2
→ GT = GTUmax
Y
YO* = YL
→ GT max = F
*
4g I gO
YI = YS
25
2
Talvolta si usa il GTMAX come fattore di merito di un componente attivo anche nel caso di
quadripoli non unilaterali, sebbene esso non abbia un significato ben individuabile.
Quando si progetta un amplificatore il generatore e il carico sono fissati. In genere viene richiesto di
massimizzare il guadagno di trasduttore e/o di minimizzare la cifra di rumore.
Per fare ciò si possono utilizzare opportune reti di adattamento M1 ed M2 in figura che fanno si che
il quadripolo “veda” le ammettenze opportune al conseguimento dell’obiettivo fissato a specifica.
M1
M2
1.4 Reti di adattamento
I quadripoli utilizzati come trasformatori di impedenza prendono il nome di Reti di Adattamento.
Tali reti dovranno avere le seguenti caratteristiche:
• Essere passive per non introdurre ulteriori stadi con componenti attivi che sono causa di
dissipazione di potenza e introduzione di rumore;
• Essere non dissipative (ovvero prive di resistenze) per non causare attenuazione di potenza e
non introdurre sorgenti di rumore termico;
Esse risultano, quindi, necessariamente reciproche (fatto salvo l’improbabile caso di impiego di
componenti passivi non isotropi, quali, ad esempio, le ferriti che dissimmetrizzano la matrice delle
impedenze della rete).
1.4.1 Teorema fondamentale delle reti di adattamento
Ipotesi: se un quadripolo è passivo, non dissipativo e reciproco e su una delle due porte si realizza
l’adattamento complesso coniugato,
Tesi: anche sull’altra porta si ottiene adattamento complesso coniugato.
26
Z1
PIN
+
V1
-
Z2
POUT
ZIN
Dimostrazione:
Per ipotesi: Z IN = Z 1* ⇒ PIN = PAin =
V12M
= potenza in ingresso
8 R1
Z IN = Z 1* ⇒ Z OUT = Z 2*
La rete è passiva, quindi POUT ≤ PIN
Non dissipativa, quindi POUT = PIN
POUT =
I 22M
R2
2
perciò
V12M
= 4 R1 R2
I 22M
Spegniamo V1 e usiamo la reciprocità inserendo un generatore di tensione in serie a Z2.
I1
Z2
+
V2
-
Z1
P1
P1 =
I 12M
1
=
2
V2 M 4 R1 R2
I 12M =
V22M
4 R1 R2
P2
V22M R1 V22M
=
potenza che fluisce sul carico Z1
4 R1 R2 2 8 R2
Rete passiva, non dissipativa → P2=P1
Il generatore V2 sta erogando una potenza pari a quella disponibile perciò sta lavorando in
condizioni di adattamento complesso coniugato ovvero.
Z OUT = Z 2*
C.D.D.
Abbiamo così dimostrato che l’adattamento c.c. in ingresso ad una reta passiva, non dissipativa e
reciproca garantisce l’adattamento c.c. anche in uscita.
27
Corollario:
il guadagno di potenza disponibile di una rete passiva non dissipativa e reciproca è
unitario.
Dimostrazione:
PAin
GA =
ZS
PAout
PAin
ZOUT*
ZIN=ZS*
Si sceglie ZL in modo da realizzare l’adattamento C.C. in uscita. In base al teorema prima
dimostrato, questo comporta adattamento C.C. anche in ingresso: sotto queste condizioni, quindi, il
generatore di segnale eroga la massima potenza, ovvero quella disponibile PAin . Essa è anche la
massima potenza erogabile sul carico, essendo la rete passiva, e quindi coincide con la potenza
disponibile del generatore di Thevenin in uscita, ovvero con PAOUT. Quindi:
PIN = POUT ⇒ PAin = PAout ⇒ G A = 1
1.4.2 Quadripoli in cascata
Calcoliamo, adesso, il guadagno di trasduttore di 2 quadripoli in cascata che sarà utile in seguito
per valutare l’effetto dell’inserimento delle reti di adattamento in ingresso e in uscita.
ZS
+
VS
-
GTtot =
Q1
Q2
ZL
P
PL
P
= L ⋅ Ain 2 = GT 2 G A1
PAin1 PAin 2 PAin1
Se fossero 3: GTtot = G A1G A 2 GT 3
N −1
In generale GTtot = GTN ∑ G An
n =1
Utilizzando i risultati prima ottenuti, è possibile valutare l’effetto dell’introduzione di reti di
adattamento sul guadagno di trasduttore dell’amplificatore così ottenuto.
28
POUT
PIN
YS
PAin
M1
PL
YSV
YL
M2
Q
YLV
POUT
PIN
PAin
M1
PL
M2
Q
YLV
YSV
Vediamo come si modificano le potenze
GTtot =
P
PL
= OUT = G A1GTQ = GTQ , essendo GA1 = 1 in quanto guadagno di potenza disponibile di
PAin
PAin
una rete di adattamento (v. corollario) e GTQ = GT(YSV, YLV).
In altri termini: il guadagno di trasduttore dell’amplificatore con le reti di adattamento coincide con
quello del quadripolo attivo, calcolato in corrispondenza delle ammettenze viste che sono diverse da
quelle di
sorgente e di carico YS e YL rispettivamente. Si possono, quindi, scegliere valori
opportuni per YSV e YLV in modo da ottenere il valore di GT desiderato. Il problema, quindi, si
riduce a quello di progettare opportunamente le reti di adattamento in modo da trasformare YS e YL
in YSV e YLV rispettivamente.
1.4.3 Trasformazioni parallelo-serie e viceversa.
Dato una gruppo RC parallelo è possibile trovare l’equivalente serie ad una frequenza fissata.
RS
RP
CP
CS
29
RP
jω C P
RP
R (1 − jωRP C P )
ZP =
=
= P
R P + jω C P 1 + jω R P C P
1 + ω 2 RP2 C P2
Z S = RS +
1
1
= RS − j
jωC S
ωC S
Definiamo QP = ωRP C P fattore di qualità
ZP =
RP
RP2 C P
RP
RP
QP2
j ω 2 RP2 C P2
1
ω
−
j
=
−
=
−
j
ωC P 1 + QP2
1 + QP2
1 + QP2 1 + QP2 ωC P 1 + QP2
1 + QP2
Affinché le due reti siano equivalenti devono avere la stessa parte reale e la stessa parte
immaginaria.
RS =
RP
1 + QP2
CS = CP
1 + QP2
QP2
N.B. L’equivalenza vale solo ad una frequenza in quanto in QP compare la pulsazione ω.
1.4.4 Fattori di Qualità
E’ opportuno, a questo punto, fare qualche riflessione sul fattore di qualità Q dei circuiti risonanti
sia di tipo serie che di tipo parallelo.
Circuito RLC parallelo
|Z|
R
Z
R
C
L
R
2
f1
30
f2
f
Esiste una frequenza alla quale si ha risonanza:
1
= ω 0 L . Il gruppo LC risulta un circuito
ω0C
aperto. L’ammettenza vista è nulla, l’impedenza vista → ∞
Per f > f0 la capacità predomina nel parallelo ∠Z > 0
Per f < f0 l’induttanza predomina nel parallelo ∠Z < 0
Le frequenze f1 ed f2 alle quali l’impedenza diminuisce di 3dB rispetto a |Z|max individuano la
banda passante del circuito. f2-f1=B
Q≡
f0
fattore di qualità: al crescere di Q la banda B si restringe, a parità di frequenza centrale.
B
Q = ω 0 RC =
R
ω0 L
ω0 =
1
pulsazione di risonanza
LC
C=
1
ω 02 L
Se immaginiamo di alimentare il gruppo RLC con una corrente sinusoidale alla frequenza di
risonanza, nel gruppo LC passa comunque corrente anche se il generatore vede un’impedenza
infinita. In L e in C passano correnti uguali in modulo e opposte in segno (sfasate di 180°).
Nel caso del circuito RLC serie il fattore di qualità Qs è definito come segue
L
QS =
R
C
|Z|
ω L
1
= 0 fattore di qualità
ω 0 RC
R
R
f
• QS elevato significa una banda passante stretta ω 0 L >> R
• Q elevato significa ω 0 C >> R
1.4.5 Esempi
Supponiamo di avere una resistenza di 100Ω e di volerla trasformare in una da 50Ω a f0=100MHz.
Si può ottenere questo risultato interponendo una rete di adattamento M opportunamente
dimensionata. Si mette in parallelo a Rp = 100 Ω una capacità Cp di valore opportuno in modo tale
che l’equivalente serie sia costituito da una capacità CS in serie ad una resistenza RS = 50 .
31
R P = R S + RS Q P2
M
100Ω
QP =
R P − RS
100 − 50
=
=1
RS
50
50Ω
.
Dal valore di QP appena determinato si ricava CP e, quindi CS come indicato nel seguito
CS
RP=100Ω
Q P = ωR P C P
CP
RS=50Ω
CP =
QP
= 15 pF
ωR P
Per neutralizzare l’effetto di CS basta mettere in serie un’induttanza che risuoni con CS alla
frequenza di interesse.
CS = CP
CS
LX
−
LX =
1 + Q P2
= 30 pF
Q P2
1
+ ωL X = 0
ωC S
1
≅ 80nH
ω CS
2
Con una capacità di 15pF e un’induttanza di 80nH alla frequenza di lavoro abbiamo trasformato la
resistenza da 100Ω in una da 50Ω.
LX
100Ω
CP
32
RVout=50Ω
Esaminiamo, adesso, il caso duale: si vuole trasformare una resistenza in una di valore maggiore. A
tal fine si useranno le proprietà della trasformazione serire-parallelo. Descriviamo subito con un
esempio questo tipo di trasformazione.
Esempio: 100Ω → 200Ω @ 100MHz
In maniera duale a quanto fatto in precedenza individuiamo i valori di RP e CP dell’equivalente
parallelo a partire da quello serie
CS
CP
RS
(
R P = RS 1 + QS2
RP − RS
=
RS
200 − 100
=1
100
1
ωR S C S
RS = 100Ω
RP = 200Ω
RP
QS =
QS =
CS =
)
CP = CS
QS2
1 + QS2
1
≅ 15.9 pF
ωR S C S
CS
LX
RS
CP
RP
CP = CS
QS2
≅ 8 pF
1 + Q S2
L’aggiunta dell’induttanza LX in parallelo a CP ha la funzione di neutralizzare la parte
immaginaria:
B P + B X = 0 → ωC P −
1
1
= 0 → LX = 2
≅ 300nH
ωL X
ω CP
Quindi la rete di adattamento sarà costituita anche in questo caso da una squadra LC:
33
CS
200Ω
100Ω
LX
La rete seguente è in grado di effettuare la trasformazione 100Ω → 200Ω: vediamo cosa accade
delle tensioni
15.9pF
300nH
R
V1S=V1Mcos(ωt)
+
V1S
-
Poiché,
come
abbiamo
dimostrato,
la
potenza
disponibile
non
cambia.
2
2
V
V
PAin = PAout ⇒ ThM = 1M
8 ⋅ 200 8 ⋅ 100
Ne consegue che VThM = 2V1M , ovvero la tensione equivalente di Thevenin in uscita risulta
maggiore di quella in ingresso. Si è verificata un’amplificazione di tensione anche senza
componenti attivi. Il gruppo LC si comporta come un trasformatore di impedenza, ma,
contemporaneamente, come un “amplificatore” (sarebbe più corretto parlare di “trasformatore”) di
tensione.
1.4.6 Procedimento standard per il progetto di reti di adattamento
Con le reti di adattamento si può trasformare una qualunque ammettenza passiva in una qualunque
altra purchè passiva. Nel seguito si individuerà una possibile procedura per ottenere il risultato
suddetto, con lo scopo di dimostrare che tale trasformazione è sempre possibile. La procedura
indicata è solo una delle tante che possono essere messe in atto: la rete per la trasformazione di
impedenza non è unica.
Y1 = G1 + jB1
Y2 = G 2 + jB2
Zi = 1/Yi
1
G
ℜ{Z i } = ℜ = 2
2
Yi Gi + Bi
34
1
1
<
G1 G 2
1° caso:
trasformazione in salita
da SERIE a PARALLELO
jX1
jB1
1
G1
R1
Innanzi tutto si ricava l’impedenza Z1
Z 1 = R1 + jX 1 =
G1
B
−j 2 1 2
2
G + B1
G1 + B1
2
1
Quindi ci riconduciamo al caso precedentemente studiato di trasformazione di resistenza
neutralizzando la parte reattiva con l’aggiunta, in serie, di una di pari modulo e segno opposto.
R1
jX1
-jX1
A questo punto applichiamo il procedimento già visto.
CS
RS
RP
CP
RP =
1
G2
Si tratta di una trasformazione in salita: verifichiamo se RP > R1:
R1 =
G1
1
1
≤
<
= RP OK!
2
G + G2 G1 G2
2
1
La parte reale desiderata è stata così ottenuta. Per quella immaginaria bisogna aggiungere in
parallelo a CP una suscettanza BX tale che B X + BP = B2
35
-jX1
CS
Y1
Infine sostituiamo alla
serie
1
−j
− jX 1 un’unica
ωC S
reattanza di valore
BX
Esempio:
Y1 = (100 + j 50)mS → Y2 = (10 − j 20)mS @ f0 = 150MHz
1
1
= 10Ω <
= 100Ω
G1
G2
Z1 =
R1 = 8Ω
G1
B
− j 2 1 2 = (8 − 4 j )Ω
2
G + B1
G1 + B1
2
1
-j4Ω
X 1 = − 4Ω
j4Ω
CS
CP
8Ω
RP
RP=100Ω
QS =
100 − 8
= 3.39 QS2 = 11.5
8
QS =
1
ωR1C S
CS =
1
1
=
= 39.14 pF
ωR1QS 8 ⋅ 150 ⋅ 10 6 ⋅ 3.39
QS2
CP = CS
= 36 pF
1 + QS2
B X + ωC P = −20mS
CP
RP
BX
B X = −ωC P − 20mS = −53.9mS
suscettanza negativa → induttanza
1
BX = −
L X = 19.6nH
ωL X
X = 4−
1
= −23.2Ω
ωC S
reattanza negativa → capacità
CTOT = −
1
= 45.7 pF
ωX
CTOT
Y1
LX
36
Y2
1
1
>
G1 G2
2° caso:
trasformazione in discesa
da PARALLELO a SERIE
La procedura è esattamente duale: si calcola Z2 = 1/Y2
1
G1
R2
1
G2
jB1
jX2
jB2
jX2
CP
R2
-jB1
Z2 =
R S = R2 =
QP =
CP =
XX =
G2
G + B22
2
2
G2
B
−j 2 2 2
2
G + B2
G 2 + B2
2
2
G
1
1
1
> R2 = 2 2 2 <
<
G1
G2 + B2 G2 G1
1
− R2
G1
ωC P
=
R2
G1
QP G1
ω
→ CS
1
− X2
ω0C S
XX
BTOT = C P // − jB1
BTOT
BTOT = − j
37
1
− jB1
ωC P
jXX
Abbiamo, pertanto, dimostrato che è sempre possibile utilizzando due elementi reattivi, trasformare,
ad una certa frequenza, qualunque ammettenza in qualunque altra.
1.4.7 Limiti di utilizzo di elementi passivi
E’ opportuno fare alcune considerazione sulle prestazioni di induttanze e capacità alle alte
frequenze.
Gli elementi reattivi mantengono il comportamento previsto soltanto entro un certo range
frequenziale, al di fuori del quale la schematizzazione di un bipolo reattivo è più complicata rispetto
alla sola induttanza o capacità.
• Un condensatore reale si schematizza aggiungendo in serie alla capacità una resistenza e
un’induttanza che tengono conto degli effetti di perdita.
Alle alte frequenze gli effetti di perdita si accentuano.
-
dissipazione di potenza: la corrente si addensa in superficie (effetto pelle), la sezione appare
inferiore perciò si rileva un aumento di resistività.
-
accoppiamenti magnetici dovuti agli avvolgimenti dei fili elettrici: al crescere della frequenza
la componente induttiva può sovrastare quella capacitiva.
• Un induttore reale si schematizza aggiungendo in parallelo all’induttanza una capacità e una
resistenza.
Gli effetti resistvi e capacitivi sono dovuti al fatto che le spire hanno dimensioni non nulle e si
accentuano con la frequenza
In entrambi i casi si avrà risonanza per una certa frequenza oltre la quale il comportamento
dell’elemento reattivo non è più quello previsto dalla semplice schematizzazione con L o C.
38
caso
parallelo
caso serie
fr
f
fr
f
Ogni componente reattivo va utilizzato al di sotto della propria frequenza di risonanza indicata dal
costruttore.
Più è alto il valore nominale della capacità o dell’ induttanza, più è bassa la frequenza di risonanza
fr e minore sarà il range di frequenze in cui il bipolo può essere utilizzato.
A puro titolo di esempio si citano alcuni valori indicativi per componenti commerciali:
C = 1µF → fr = 100 MHz
C = 1nF → fr = 1 GHz
L ≅ 100nH ⇒ f r ≅ 1GHz
1.5 Il rumore nei componenti e negli amplificatori.
Premessa:
La trattazione presentata nel seguito non ha alcuna pretesa di rigore e viene proposta in questa
forma solo per ovviare alla completa assenza, nei corsi che precedono quello di Elettronica per le
Radiofrequenze, di uno spazio dedicato ai processi stocastici (segnali aleatori). Sarebbe quella la
sede correttamente deputata all’introduzione ed all’elaborazione dei concetti di Probabilità,
Variabile Aleatoria, Processo stocastico, Funzione di autocorrelazione e Densità spettrale di
potenza. Nel seguito si seguirà un approccio alternativo a quello tradizionale che non può
assolutamente essere considerato sostitutivo dello stesso. L’approccio scelto ha, come unico
vantaggio, quello di permettere di concentrare in poche ore di lezione l’esposizione di alcuni
concetti di base dai quali non si può prescindere se si vuole introdurre la definizione di Cifra di
Rumore, indispensabile per il progetto di amplificatori a radiofrequenza. Si rimanda, pertanto, lo
studente al modulo di Teoria dei Segnali Aleatori per una trattazione che possa considerarsi
completa e rigorosa, a differenza di quella presentata nel seguito che risulta, in talune parti,
puramente intuitiva e, in qualche punto, approssimativa.
39
In Elettronica si definisce col termine “Rumore” una variazione aleatoria della grandezza fisica
sotto osservazione della quale non è possibile fornire una descrizione deterministica. In alcuni casi,
però, di tali fluttuazioni aleatorie è possibile fornire una descrizione di tipo statistico.
Indicando con x(t) il fenomeno aleatorio (o Processo stocastico) che si sovrappone al valore
deterministicamente dato della grandezza sotto esame, si può definire il suo valor quadratico medio
come segue:
2
1
T →∞ T
x(t1 , T ) = lim
∫
t1 +T
t1
x 2 (t )dt
In generale il valore quadratico medio dipenderà dall’istante iniziale t1 e dalla durata del tempo di
osservazione T. Se, per T “abbastanza grandi” il risultato dell’operazione di integrazione non
dipende da T e da t1, allora diremo che il processo x(t) è stazionario rispetto al suo valore quadratico
medio. Molte delle sorgenti di rumore presenti nei materiali e nei dispositivi elettronici godono
della proprietà della stazionarietà rispetto ad alcuni parametri statistici (come il valore quadratico
medio, oppure il valor medio).
Se x(t) rappresenta la tensione ai capi di una resistenza R, allora la potenza istantanea P(t) dissipata
sulla resistenza e quella media P0 sono date da:
+
x(t)
P (t ) =
R
x 2 (t )
R
1
T →∞ T
-
P0 = lim
T
∫
0
x 2 (t )
x 2 (t )
dt =
R
R
potenza media
1.5.1 Sorgenti di rumore
Le sorgenti di rumore nei materiali e nei dispositivi per l’elettronica si dividono in 2 categorie
1. Intrinseche : sono ineliminabili in quanto scaturiscono dalle modalità stesse di
funzionamento del dispositivo
2. Estrinseche : possono essere ridotte o eliminate con una particolare cura nella produzione
dei materiali e dei dispositivi. Si tratta di sorgenti di rumore legate alla presenza di difetti e
impurità.
Tra le sorgenti di rumore intrinseco ricordiamo:
Rumore termico: è presente sotto forma di fluttuazione di tensione aleatoria ai capi di ogni
conduttore con resistenza R ed è dovuto al fatto che i portatori di carica sono
soggetti ad agitazione termica e la loro distribuzione lungo il conduttore è
variabile.
40
Shot noise: è dovuto al fatto che a livello microscopico la corrente che attraversa una barriera di
potenziale ha un comportamento granulare e gli istanti di attraversamento dei singoli
portatori di carica sono tra di loro indipendenti. La corrente è rappresentabile mediante
una serie di delta di Dyrac a istanti casuali di cui si conosce solo il numero medio per
unità di tempo (il quale determina la componente DC della corrente che attraversa la
giunzione).
La sorgente di rumore estrinseco (o in eccesso) più diffusa è il rumore flicker o 1/f:
Rumore flicker: ha uno spettro la cui energia è concentrata alle basse frequenze. Dipende dalla
presenza di impurità e difetti del reticolo cristallino, perciò è strettamente legato al
processo tecnologico.
1.5.3 Densità spettrale di potenza
Definiamo come segue la densità spettrale di potenza (o spettro di potenza) Sx(f):
Immaginiamo di disporre di un filtro ideale con risposta in frequenza diversa da zero solo tra
ω1 = 2πf1 e ω2 = 2πf2
+
|H(ω)|
+
x(t)
xu(t)
-
-
ω1
ω2
ω
La densità spettrale di potenza del processo aleatorio x(t) (DSP) è definita dalla seguente relazione:
f2
∫ S ( f )df
x
= xu2 (t )
f1
Ovvero, il suo integrale tra f1 ed f2 coincide col valore quadratico medio del segnale aleatorio xu(t)
che si otterrebbe filtrando x(t) col filtro ideale di cui sopra.
Se x(t) è la tensione ai capi di una resistenza R e si sceglie f2=f1+df, allora
SX(f)df è il valore quadratico medio della tensione di uscita al filtro → δ xu2 (t )
in un intorno
infinitesimo di f1. Questo spiega la denominazione di “densità spettrale di potenza” la quale si
V 2
misura in (se x(t) =[V]), oppure in
Hz
A2
(se x(t) = [A]).
Hz
41
Nel caso in cui Sx(f) non dipenda dalla frequenza, ovvero sia costante, il processo X(t) ed il suo
spettro si dicono “bianchi”. Per un processo aleatorio bianco in ogni intervallo di frequenze l’uscita
dipende solo dall’ampiezza dell’intervallo ∆f : xu2 (t ) = S X 0 ∆f
Si è detto che ad una resistenza è associata una fluttuazione aleatoria di tensione (rumore termico)
rappresentato con un generatore eT in figura. Nyquist ha dimostrato che il rumore termico è bianco e
che la sua densità spettrale di potenza ST è data da: .
eT
+R
ST = 4KTR
Più in generale Nyquist ha dimostrato che un bipolo generico di impedenza Z = R+jX può essere
rappresentato mediante un’impedenza non rumorosa con in serie un generatore di tensione con
densità spettrale di potenza pari a S T = 4 KTR
+Z = R+jX
Z noiseless
Si deve ancora a Nyquist il seguente teorema:
Dato un processo stocastico x(t) in ingresso ad un sistema caratterizzato da una risposta in
frequenza H(ω), la densità spettrale di potenza Su(f) del segnale aleatorio in uscita xu(t) è data da:
xi(t)
H(ω)
xu(t)
Su = Si H (ω)
2
Prima di proseguire diamo qualche indicazione circa l’ordine di grandezza delle quantità che
abbiamo introdotto.
Es: R=1KΩ
42
su una finestra di 1Hz il valore quadratico medio del generatore di tenzione aleatoria che
[
rappresenta il rumore termico è dato da xu2 (t ) = S T ∆f = 4 KTR∆f = 4 2 nV 2
]
Il valore efficace è, ovviamente:
x eff =
S x ∆f
xeff =
xu2 (t ) = 4nV
dà una misura del valore efficace: in questo caso equivale a quello di una sinusoide
di ampiezza 1nV.
Rumore di corrente
Finora abbiamo sempre fatto riferimento ad un processo stocastico con le dimensioni di una
tenzione (generatore di tensione di rumore), ma esistono delle sorgenti di rumore che è più
immediato rappresentare con un generatore stocastico di corrente. Un esempio è il rumore shot o
“rumore di giunzione”. Il rumore shot si rappresenta con un generatore di corrente aleatorio con
densità spettrale di potenza che dipende dalla corrente media che scorre nella giunzione, in parallelo
alla resistenza differenziale che rappresenta la giunzione medesima.
Io
Es: Io=1mA
rd
A2
S I = 2qI o
Hz
in
A2
pA
S I = 3.2 ⋅ 10
S I = 17
Hz
Hz
Si tratta di fenomeni che su 1Hz di banda danno un valore efficace di
corrente di decine di picoAmpere.
− 22
1.5.4 Rumore flicker
Si riscontra in moltissimi i fenomeni fisici, non solo elettrici. La sua densità spettrale di potenza è
del tipo :
K
0.8 ≤ γ ≤1.2
fγ
Si osserva in dispositivi attraversati da una componente di corrente continua sia passivi che attivi.
Sf (f )=
Dipende dalla presenza di difetti nei materiali e di impurità ed è uno dei parametri che qualificano
la bontà di un componente elettronico. In genere ad una certa frequenza lo spettro ha una
dipendenza crescente con la corrente. Si somma al rumore bianco di fondo (termico e shot) che è
43
sempre presente col suo spettro costante. Da una certe frequenza in su, detta frequenza d’angolo fC,
il rumore bianco prevale sul flicker che risulta trascurabile.
10 log S f ( f )
Scala bilogaritmica
fc può assumere
valori in un range
molto ampio
Hz ÷ MHz
log
fc
f
fo
Il rumore flicker diminuisce con l’area attiva del dispositivo (maggiore è l’area, minore il rumore).
Alle radiofrequenze il rumore flicker è pressocchè trascurabile in quanto il punto d’angolo si trova,
in genere, molto più in basso del range di frequenze di interesse. Nella zona alta delle frequenze di
lavoro si osserva una componente di rumore divergente (cresce con ω2) non tanto perché sia
generata da una sorgente con caratteristiche di questo tipo, bensì a causa di effetti filtranti dei
componenti reattivi intrinseci e parassiti su sorgenti originariamente bianche.
10 log S f ( f )
SH ∝ f
log
fc
2
f
fo
La curva per il suo andamento è detta “a vasca da bagno”.
Nel caso di dispositivi a basso rumore per basse frequenze, per un componente attivo di ottima
2
nV
qualità ci si può attendere un punto d’angolo intorno a 3Hz e un rumore bianco di 0.8
.
Hz
1.5.6 Cifra di rumore
Un amplificatore, a causa delle sorgenti di rumore presenti al suo interno, presenterà, tipicamente,
un rapporto segnale rumore in uscita peggiore (minore) di quello in ingresso. Nel migliore dei casi
44
il rapporto segnale rumore rimarrà invariato.
L’effetto di degrado di tale rapporto introdotto
dall’amplificatore si misura mediante un parametro denominato “Cifra di Rumore” indicato, in
genere, con la sigla NF (Noise Figure).
ZS
en1
+
Q
vs(t)
vu(t)
eT
in1
en2
-
NF =
Potenza ⋅ di ⋅ Rumore ⋅ totale ⋅ in ⋅ uscita
Potenza ⋅ di ⋅ Rumore ⋅ in ⋅ uscita ⋅ dovuto ⋅ a ⋅ Z S
In genere si misura in dB 10log(NF)
Il rumore in uscita dovuto a ZS corrisponde al rumore che si avrebbe in uscita se Q fosse noiseless,
ovvero se agisse solo la sorgente di rumore termico di ZS. In tal caso la cifra di rumore sarebbe
unitaria. In generale NF≥1, NFdB≥0dB.
Il rumore totale in uscita si ottiene integrando la DSP di rumore in uscita su tutta la banda di
interesse. Se la banda di interesse è ridotta o si vuole definire una cifra di rumore puntuale ad una
certa frequenza (o spot), NF è un rapporto di DSP
Si può dimostrare che un quadripolo rumoroso è equivalente, ai fini di una determinata uscita, ad
una rete priva di generatori interni con un generatore di tensione e di corrente opportuni in ingresso.
en
+ --
in
+
vu(t)
-
Noise
less
I generatori di rumore equivalenti esterni possono essere descritti mediante le DSP associate.
V 2
Sen ;
Hz
A2
Sin 4
Hz
Data una sorgente di rumore in serie ad un bipolo ZS, se chiudiamo il circuito in serie ad
un’impedenza ZS*, la tensione ai suoi capi sarà:
45
+
eT
--
+
vD
ZS
vD =
ZS*
eT
e
e
RS = T RS = T
2 RS
2
Z + ZS
*
S
vD 1
=
eT 2
--
Sv D =
SeT
4
1
2 è la funzione di trasferimento tra eT e vD
Poiché questa scelta è quella che realizza l’adattamento complesso coniugato, essa è anche quella
che permette di trasferire sul carico la massima potenza disponibile.
P=
Sv D ∆f SeT ∆f v D2 (t )
=
=
ha le dimensioni di una potenza.
R
4R
R
Nel caso di rumore termico la densità spettrale di potenza disponibile (che si misura in W/Hz) è
data da:
SA =
SeT 4 KTR
W
=
= KT Densità Spettrale di Potenza disponibile.
4R
4R
Hz
Più in generale, dato un generatore di rumore di tensione in serie e un’impedenza si definisce la sua
densità spettrale di potenza disponibile come segue:
S AX =
ZS
SX
4 RS
+
x(t)
-
La potenza disponibile PA nell’intervallo di frequenza f1-f2 è data da:
f2
PA=
∫S
AX
df [W]
Potenza disponibile
f1
Rappresenta la massima potenza che il generatore di rumore può cedere a un carico nell’intervallo
f2-f1 . tale risultato si consegue in condizioni di adattamento c.c.
46
Il rumore totale in uscita è dovuto sia al quadripolo (sorgenti en,in) sia all’impedenza del generatore
di segnale che è affetta da rumore termico eT, mentre il rumore in uscita dovuto a ZS dipende solo
da eT.
Sotto certe condizioni, dette “di indipendenza” tra i diversi processi aleatori, lo spettro del processo
risultante si ottiene semplicemente sommando i singoli spettri. Lo stesso vale, quindi, per le
potenze di rumore.
eT
en
+-
+-
ZS
Noise
less
in
NF =
N UeT + N Uenin
N UeT
= 1+
NUQ
N Uin
N Uin = S AeT GT ∆f potenza di rumore in uscita dovuto all’ingresso
NUQ =
Se n + Sin Z S
4RS
2
GT ∆f
en
en
++ -
S AQ =
Sen + Sin Z S
2
ZS
4 RS
inZS
in
+-
ZS
Le condizioni, dette “di indipendenza” tra en e in, sono, in genere, rispettate fino a fT/10 dove fT è la
frequenza di taglio del transistore.
Per la cifra di rumore si ottiene, in definitiva:
NF = 1 +
Se n + Si n Z S
2
4 KTR S
1.5.7 Progetto di amplificatori a basso rumore.
Vogliamo progettare un amplificatore a basso rumore (LNA -Low Noise Amplifier-)
NF dipende dal quadripolo, attraverso Sen ed Sin, e dal generatore di segnale, attraverso ZS.
Progettare a basso rumore, una volta scelto il dispositivo attivo, equivale a individuare la
terminazione ottima per quando riguarda il rumore, ovvero, quella che minimizza NF. Procediamo,
47
quindi, alla ricerca del minimo al variare di ZS, osservando che, certamente, NF sarà minimo per
XS=0.
NF = 1 +
(
)
Se n + RS2 + X S2 Si n
4 KTR S
Si cercano gli zeri della derivata prima
(
)
2
d
(NF ) = 2 RS Sin 4 KTR S − Sen 2+ RS Sin 4 KT = 0
dR S
(4 KTR S )
Z ON = RON =
Sen
Sin
→
(
)
4 KT RS2 Sin − Se n = 0
V
A
Poiché ZS è, di norma, fissata dalle specifiche di progetto, bisognerà introdurre delle reti di
trasformazione di impedenza tra la sorgente e l’ingresso dell’amplificatore per far si che esso veda
l’impedenza ottima dal punto di vista del rumore.
Per valutare l’effetto di tali reti su NF utilizziamo una formula dovuta a Friis che permette di
calcolare la cifra di rumore globale di una rete costituita dalla cascata di due o più quadripoli.
Con ovvio simbolismo si ottiene per la cifra di rumore totale NFTOT
Q1
NFTOT = NF1 +
Q2
NF2 − 1 NF3 − 1
+
+ ...
G A1
G A1G A 2
La formula di Friis mostra in termini analitici una considerazione ovvia: per minimizzare la cifra di
rumore totale di un sistema, bisogna usare come primo stadio quello a cifra di rumore più bassa ed
assicurarsi che introduca un guadagno quanto maggiore possibile.
Nel caso in cui Q1 sia una rete di adattamento (passiva, reciproca e non dissipativa) la sua cifra di
rumore NF1 sarà unitaria (non contiene generatori interni di rumore) come anche il suo guadagno di
potenza disponibile GA1. Pertanto
NFTOT=NFQ2
Ovvero la cifra di rumore totale coincide con quella del quadripolo attivo.
Si può facilmente dimostrare, infine, che laa cifra di rumore così come è stata definita, coincide col
rapporto tra il rapporto segnale rumore in ingresso e quello in uscita:
48
Si
NF =
Su
Ni
Nu
quindi NF = 1 ⇒
Si Su
=
Ni Nu
Riusciamo a controllare NF ottimizzando la terminazione in ingresso tramite un’opportuna rete di
adattamento che non deteriora la cifra di rumore.
ZSon
ZL*
M1
Q
M2
ZL
Dimensioniamo M1 per trasformare l’impedenza di sorgente in quella ottima per il rumore.
Se, poi, vogliamo massimizzare il guadagno, dimensioniamo M2 in modo da avere adattamento
complesso coniugato in uscita (quando ciò sia possibile), oppure seguiamo i criteri delineati in
precedenza nel caso di progetto a ZS fissata e quadripolo potenzialmente instabile.
Infine, per calcolare la potenza di rumore in uscita su una certa banda ∆f ricordiamo che:
NF =
NuTOT
NuTOT
=
Nu in
KT ⋅ GT ∆f
E, quindi, la potenza totale di rumore in uscita sarà:
NuTOT = NF ⋅ KT ⋅ GT ∆f
49
Capitolo 2
Oscillatori a radiofrequenza
Gli oscillatori sono sistemi in grado di generare autonomamente senza sollecitazioni esterne una
forma d’onda periodica. Se la forma d’onda è sinusoidale, si parla di oscillatori sinusoidali. La
teoria degli oscillatori è basata sul Teorema di Scomposizione e sulle condizioni di Barkhausen.
Condizioni di Barkhausen:
βA f = 1
0
∠β A = 0
In generale per un quadripolo caratterizzato a parametri Y è possibile calcolare il β A e trovarlo
diverso da zero anche se non è presente una rete di retroazione esterna al quadripolo medesimo.
Questo grazie all’effetto di retroazione dell’uscita sull’ingresso attraverso il parametro YR .
YS
YI
YRV2
YO
YL
βA =
YFV1
YR YF
(YI + YS )(YO + YL )
2.1 Configurazioni di oscillatori
Nel caso in cui il quadripolo sia un transistore bipolare i suoi parametri Y possono essere ricavati
dal circuito di Giacoletto. Ad esempio per un BJT in configurazione CE si ottiene:
CT
+
v1
-
rb’e
Cb’e
YIe =
gmvb’e
1
+ jω (C b 'e + CT )
rb 'e
YFe = g m − jωCT
+
v2
-
YOe = jωCT
YRe = − jωCT
Vogliamo vedere sotto quali condizioni, scegliendo opportunamente YS e YL riusciamo a realizzare
un oscillatore, ovvero a far si che le condizioni di Barkhausen vengano soddisfatte..
50
Partiamo da YS=0 ingresso aperto
e YL=0 uscita aperta e verifichiamo la posizione di fasori che
rappresentano in numeratore ed il denominatore del β A . Infatti condizione necessaria è che i due
fasori risultino sovrapposti in modo
tale da ottenere fase nulla per il β A .
ℑ
YOeYIe
βA =
YR YF
YI YO
ℜ{YIe } > 0
YOe
YIe ℑ{YIe } > 0
La situazione è quella rappresentata
in figura dalla quale risulta evidente
ℜ
che il β A ha fase diversa da zero..
ℜ{YFe } > 0
YRe
YReYFe
YFe ℑ{YFe } > 0
Aggiungiamo adesso YS,YL scegliendoli in modo da far si che i fasori del numeratore e del
denominatore risultino sovrapposti. In figura
ℑ
sono rappresentati due fasori YS,YL
permettono
YI
di
conseguire
il
che
risultato
suddetto, infatti la “punta” del vettore YI +
YO
YS si trova sulla retta di YF e quella di
YO+YL sulla retta di YR
YF
YL
ℜ
YS
YR
Sia YS che YL sono pure suscettanze negative (conduttanza nulla). Si tratta quindi di due induttanze
di valore opportuno da porre in parallelo all’ingresso e all’uscita.
51
A questo punto è garantito il verificarsi della condizione sulla fase e, per ottenere le condizioni di
innesco, bisognerà che sia garantita anche quella sul βA > 1
La configurazione di oscillatore così ottenuta viene denominata oscillatore di HARTLEY a
emettitore comune.
Nella figura seguente è rappresentato il circuito completo di rete di polarizzazione dell’oscillatore
di
Hartley
in
configurazione
CE.
Bisogna osservare che aggiungendo il carico RL l’ammettenza YL non risulta più puramente
immaginaria e, pertanto il vettore YO+YL non risulta più sovrapposto a YR. Per compensare ciò
bisognerà scegliere una YS, sempre puramente induttiva, ma di valore maggiore (induttanza minore)
rispetto al caso precedente, come si può desumere dalla costruzione grafica in figura.
ℑ
YO
YI
ℜ
YR
YL
YF
52
Esiste anche una variante a base comune dell’oscillatore di Hartley, come mostrato in figura.
Il circuito completo di rete di polarizzazione dell’oscillatore di Hartley in configurazione CB è il
seguente:
VCC
RFC
RFC
CA
R1
L1
R2
CB
RFC
RFC
•
•
•
RE
CBE
RL
L2
CA evita che L1 cortocircuiti collettore ed emettitore
CB porta la base a massa alla frequenza di lavoro
CBE evita che L2 cortocircuiti l’emettitore a massa
L’oscillatore di Hartley necessita di due induttanze esterne, mentre può essere preferibile limitare
l’uso degli induttori che risultano ingombranti, costosi e poco accurati. In questi casi è conveniente
una seconda configurazione di oscillatore detta di Colpitts . A tale configurazione si perviene
aggiungendo tra collettore e base una induttanza (che risulta in parallelo alla capacità CT) scelta in
modo che sia
53
ω o L <<
1
ω o CT
Si possono calcolare, adesso, come nel seguito indicato i parametri del quadripolo risultante
L
CT
rb’e
Cb’e
gmvb’e
YIt =
βA =
YR YF
(YI + YS )(YO + YL )
RL
1
1
+ jω (C b 'e + C 'T ) +
rb 'e
jω L
1
= g m − j ωC T −
jω L
ωL
1
1
YOt = jωCT +
= j ωC T −
jω L
ωL
YFt = g m − jωCT −
1
1
= − j ωC T +
jω l
ωL
Nella figura seguente sono riportati i fasori che rappresentano i diversi parametri Y nell’ipotesi che
YRt = − jωCT −
risulti ω o L <
1
ω o (CT + C b 'e )
1
e, di conseguenza, negativa la parte immaginaria di Yit
On analogo procedimento al caso di Hartley scegliamo YS,YL in modo da sovrapporre i vettori:
Yit+YS e Yot+YL rispettivamente a YFt e YRt ovvero, utilizziamo due capacità
YL = jωC1
YS = jωC 2
Si ottiene in tal modo l’oscillatore di Colpitts ad emettitore comune.
54
ℑ
YRtYFt
YRt
YL
YFt
YS
ℜ
YIt
YOtYIt
YOt
L
C1
RL
C2
Il circuito completo di rete di polarizzazione dell’oscillatore di Colpitts in configurazione CE è
rappresentato in figura:
55
La C in serie ad
L serve per il
punto di riposo
Analogamente a quanto fatto per quello di Hartley si può costruire una versione dell’oscillatore di
Colpitts a base comune come in figura:
Il circuito completo di rete di polarizzazione dell’oscillatore di Colpitts in configurazione CB è il
seguente:
56
2.2 Analisi e progetto di un Oscillatore di Colpitts
Vogliamo dimensionare un oscillatore di Colpitts a base comune adottando alcuni accorgimenti che
rendono la frequenza di oscillazione indipendente dalle caratteristiche del componente attivo
(ovvero dai suoi parametri Y).
Utilizziamo nello studio il Teorema di Scomposizione per individuare un anello e calcolare il
relativo guadagno β A .
Facciamo alcune ipotesi:
Z in >>
1
ω 0 (C 2 + C1 )
57
Questa ipotesi equivale a supporre trascurabile la corrente in Zin, ovvero a supporre la tensione Vin
quasi uguale a quella che si avrebbe a vuoto ( Z in → ∞) . Sotto questa condizioni:
Z p = R L // L //
βA =
1
CS
CS =
C1C 2
C1 + C 2
Vr
Vp
Vin = V p
I in =
Vin
C1 V p
=
Z in C1 + C 2 Z in
I 2 = AI I in
YF YL
AI =
YI (YO + YL ) − YR YF
βA =
C1
C1 + C 2
Vr = − I 2 Z p = −
C1 V p
AI Z p
C1 + C 2 Z in
C1
AI
Vr
=−
Zp
Vp
C1 + C 2 Z in
Facciamo ancora un’ipotesi:
AI ≈ −1
Si tratta di un’ipotesi ragionevole, sia pure da verificare, poiché AI rappresenta il guadagno di
corrente di un amplificatore a base comune.
Supponiamo ancora che Zin sia reale, ovvero Z in = Re ∈ ℜ
Anche questa ipotesi andrà poi verificata.
Sotto queste ipotesi: βA ≈
C1 Z p
C1 + C 2 Re
Per avere ∠β A = 0 ⇒ β A ∈ ℜ ⇒ Z p ∈ ℜ
Allora:
βA =
C1 R L
C1 + C 2 Re
f = f0
Zp è reale solo alla frequenza di risonanza f0=ω0/2π del gruppo LC ovvero
1
ω0 =
⇒ Z p = RL I
LC S
Tale frequenza (che impone la condizione sulla fase) risulta, pertanto, indipendente dalle
caratteristiche del componente attivo. Perché si inneschi l’oscillazione, comunque, è necessario
verificare anche la condizione sul modulo del β A .
58
Verifichiamo, adesso, se e sotto quali condizioni le ipotesi assunte strada facendo risultano
verificate.
Yin = YIb −
YRbYFb
YOb + YL
YRb trascurabile → In prima approssimazione Yin ≈ YIb
Ad esempio, nel caso del transistore 2N4957 alla frequenza di 100 MHz risulta Z in ≈ 20Ω e,
inoltre, Zin ≈ 1/ YIb non è reale. Per far sì che l’ipotesi di lavoro utilizzata sia verificata possiamo
aggiungere una Re in serie a Zin molto maggiore del modulo di quest’ultima, in modo tale che
risulti:
'
'
Z in ∈ ℜ
Ad esempio: Re=200Ω
Z
Z in = Z in + Re ≈ Re
Il guadagno d’anello diventa, allora:
βA ≈
C1 RL
C1 + C 2 Re
Perché sia rispettata la condizione sul modulo del β A deve essere certamente R L > Re
Perché risulti
1
<< Re scegliamo: C1 = C 2 = 100 pF ⇒ C S = 50 pF e, di conseguenza:
ω (C 2 + C1 )
L=
1
≈ 50nH
ω CS
2
0
Perché sia βA > 1 ⇒ RL > 400Ω
Poichè il carico è, di norma, fissato dalle specifiche di progetto, se risulta R L < 400Ω bisognerà
interporre una rete di trasformazione di impedenza per garantire un valore della resistenza vista
maggiore di 400 Ω .
Proviamo a fare una verifica interessante: calcoliamo l’impedenza vista da RL guardando verso
l’uscita dell’oscillatore nelle condizioni di β A =1 .
59
Vin = VG
Zv RL =
VG
IG
IG = I2 + I p = I2
βA f = f =
0
C1
C1 + C2
Ip
f = f=
C1 RL
C1 + C 2 Re
=0
IG = −
C1 VG
C1 + C 2 Re
VG = −
C1 + C 2
Re
C1
R L = β A ⋅ Re
C1 + C 2
C1
R L = − β A ⋅ Zv RL
β A ≈ 1 ⇒ Zv R
L
f = f0
= − RL
Se sono verificate le condizioni di Barkhausen, allora RL vede un’impedenza d’uscita
dell’oscillatore pari a –RL, ovvero l’impedenza totale della maglia di uscita, alla frequenza di
oscillazione, risulta nulla.
Il circuito dell’oscillatore di Colpitts completo della rete di polarizzazione è, pertanto, il seguente:
60
2.3 Autoregolazione dell’ampiezza
Lo studio dei meccanismi attraverso i quali l’oscillazione, una volta innescatosi, dà origine ad un
fenomeno di autoregolazione dell’ampiezza investe l’analisi del funzionamento non lineare del
componente attivo ed è, pertanto, estremamente difficoltosa da condurre in senza l’aiuto di un
simulatore circuitale evoluto. Possiamo, però, fornire in questa sede una descrizione intuitiva di tali
meccanismi che non ha, certamente, alcuna pretesa di rigore.
Supponiamo che l’oscillazione si sia innescata e che la VBE assuma un andamento sinusoidale di
ampiezza crescente intorno al suo valor medio iniziale VBEQ come in figura:
IB
Punto di
riposo
VBEq
VBE
t
Quando l’ampiezza dell’oscillazione supera il valore VBEQ-VT, essendo VT la tensione di soglia, la
giunzione base-emettitore va in interdizione per una frazione crescente del periodo e, di
conseguenza, la corrente IB risulta tagliata in basso come in figura.
61
Lo stesso accade per le correnti IC e IE. Questo fenomeno fa sì che il valor medio di tali correnti,
inizialmente pari, rispettivamente, a IBQ, ICQ, IEQ, tenda a crescere. Poiché la componente di
valor medio di una corrente non può attraversare, a regime, i condensatori di accoppiamento e
bypass, essa deve richiudersi attraverso le maglie resistive causando una caduta in continua in
eccesso rispetto a quella che si aveva a riposo. Per questo motivo la tensione di base VB tende a
diminuire e quella di emettitore VE tende a crescere: in altri termini , la tensione VBE diminuisce. Si
ottiene, in tal modo, un fenomeno di depolarizzazione della base e la retta intorno alla quale si
sviluppa l’andamento di VBE tende a spostarsi verso sinistra, facendo sì che la frazione di periodo
durante la quale il transistore è in zona attiva tenda a diminuire. Ci si potrebbe chiedere, a questo
punto, per quale motivo si è supposto che la componente variabile della tensione VBE continui a
presentare un andamento sinusoidale. La risposta sta nel fatto che, tale componente, essendo la base
a massa per le variazioni, è dovuta alla componente variabile della tensione VE e, quindi, è una
partizione della tensione ai capi del gruppo LCS alimentato dalla corrente pulsante IC ( si ricordi
che la IC ha lo stesso andamento della IB). Se ipotizziamo, come è opportuno fare, che il gruppo
RLLC sia caratterizzato da un elevato valore del fattore di qualità Q, ecco, allora, che le componenti
armoniche della corrente IC , filtrate dal gruppo RLLC che risuona alla frequenza di oscillazione,
non causano caduta di tensione apprezzabile su RL e solo la prima armonica contribuisce a tale
tensione che risulta, pertanto, quasi sinusoidale.
VB
VE
I B ↑⇒ V B ↓
I E ↑⇒ V E ↑
IE
62
VBE ↓⇒ I B
2.4 Oscillatori controllati in tensione
Per ottenere un oscillatore la cui frequenza sia controllabile/modulabile mediante una tensione si
utilizzano elementi circuitali che presentano una capacità variabile con la tensione di
polarizzazione, ovvero, dei varicap. Esistono moltissime soluzioni circuitali di questo tipo: ne
esaminiamo in dettaglio una tra le tante che prende il nome di Oscillatore di Clapp.
VS rappresenta la tensione modulante (o di controllo), mentre l’induttanza RFC è un corto circuito alle basse
frequenze ed è un circuito aperto alle radiofrequenze, pertanto, isola l’oscillatore vero e proprio dalla parte
di controllo. Il diodo polarizzato in inversa attraverso la batteria E si comporta come una capacità variabile.
Il gruppo LCV serie presenta una reattanza pari a
jωL +
L
1 − ω 2 LCV
1 − ω 2 LCV
1
=
= − j
jωCV
jωCV
ωCV
Se
CV
CV : ωL >
1
ωCV
allora si tratta di una reattanza induttiva e la configurazione risultante è quella di Colpitts a base
comune con la possibilità di modulare tale reattanza mediante la tensione VS. Si ottiene, in
definitiva, un oscillatore controllato in tensione o VCO (Voltage Controlled Oscillator).
63
Esaminiamo più in dettaglio come avviene la modulazione della capacità CV e, quindi della
frequenza di oscillazione.
Z→∞
RFC
CA
Ro
RS
VS
E
In continua la tensione ai capi del diodo è VCOQ =
RL
E.
RL + RO
Nel range di frequenze di VS , CA può essere considerato un corto circuito, pertanto al valore continuo della
R0
VS
RL + RO
E’ questa componente variabile che modifica in maniera dinamica il valore di CV il quale riosulta
VCQ si aggiunge una componente variabile VCOQ (t ) =
legato alla tensione di controllo da una relazione del tipo di quella riportata nella figura
Per piccole variazioni di
VS si ottiene una modulazione “quasi” lineare della frequenza di
oscillazione intorno alla frequenza centrale.
2.5 Oscillatori al quarzo
Consideriamo l’oscillatore di Colpitts studiato in precedenza. Alla frequenza di risonanza f0 Alla
frequenza di risonanza f0 abbiamo
1
= ω 0 L . Oltre a C1 e C2 ci sono altre componenti reattive
ω0CS
che contribuiscono a determinare il valore effettivo della reattanza capacitiva in parallelo a quella
induttiva dovuta all’induttanza L. C’è da aggiungere, inoltre, che C1 e C2 sono note con una certa
64
indeterminazione a causa delle tolleranze di produzione e, per finire, il loro valore può dipendere
dall’invecchiamento e dalle condizioni ambientali.
X
XL
C1
CT
Re
RE
C2
-XC
f0
f
Nella figura precedente è rappresentata la soluzione grafica che permette di individuare la frequenza
di innesco. A causa, però, degli effetti appena citati, sulla capacità effettiva CS bisogna prevedere un
certo grado di indeterminazione e di variabilità, pertanto, ciò che si può affermare è che con alta
probabilità la curva che rappresenta la sua reattanza al variare della frequenza sarà contenuta tra due
curve limite che da tali indeterminazioni e variabilità dipendono. La situazione è rappresentata nella
figura seguente dalla quale si evince che anche la frequenza di oscillazione, piuttosto che essere un
valore ben preciso, risulterà compresa tra un minimo e un masssimo.
Infine, se anche l’induttanza presenta una certa variabilità il range che contiene la frequenza
effettiva di innesco risulta ulteriormente allargato come si evince dalla figura seguente:
65
Se immaginiamo, adesso, di sostituire l’induttanza con un bipolo induttivo la cui reattanza varia
molto velocemente nell’intorno di f0 la situazione è quella rappresentata in figura.
Più ripido è l’andamento della reattanza equivalente induttiva, minore sarà l’effetto della
indeterminazione e della variabilità della reattanza equivalente CS. Il risultato sarà un oscillatore
con frequenza di innesco accurata e stabile. Queste caratteristiche possono essere riscontrate nei
quarzi.
Il quarzo è un materiale che presenta caratteristiche piezoelettriche. Applicando una forza tra due
facce di un parallelepipedo di materiale piezoelettrico e, quindi, causando una micro deformazione,
si rileva sulle facce ortogonali una differenza di potenziale. L’effetto piezoelettrico è reversibile,
ovvero, applicando una tensione, si osserva una micro deformazione. Da un punto di vista elettrico,
se si metallizzano due facce non contigue di un cristallo di quarzo e si applicano ad esse degli
elettrodi, l’impedenza vista tra tali terminali è rappresentabile mediante il circuito equivalente
semplificato in figura. In realtà nel quarzo reale sono presenti anche degli elementi in grado di
66
dissipare potenza media che andrebbero rappresentati aggiungendo delle resistenze al circuito
semplificato di figura.
L’impedenza ZQ vista ai capi è calcolata nel seguito.
1 1
Ls +
C
s
1 + LC S s 2
S CP s
ZQ =
=
1
1
LC S C P s 2 + (C P + C S )s
Ls +
+
CS s CP s
Z Q ( jω ) =
1 − LC S ω 2
C C
jω (C P + C S )1 − L S P ω 2
CS + CP
1
LC S
1
E una frequenza di risonanza parallelo: ω P2 =
C C
L P S
CP + CS
Definiamo una frequenza di risonanza serie: ω S2 =
2
ω
1 −
ω
S
Quindi: Z Q =
ω 2
jω (C S + C P )1 −
ω P
Risulta sempre CP >> CS, (ad esempio CP = 103~105 CS) pertanto ωP, sebbene sempre maggiore di
ωS, in realtà è molto prossima a quest’ultima.
67
Per ω→0: comportamento capacitivo, |Z| → ∞, circuito aperto ∠Z = −
Tra ωS e ωP: comportamento induttivo, ∠Z = +
π
2
Per ω→∞: comportamento capacitivo, |Z| → 0, corto circuito ∠Z = −
π
2
,
π
2
Se si tiene conto degli elementi di perdita, trascurati in precedenza, l’effettivo andamento del
modulo e della fase di ZQ risultano modificati come in figura, ma, se ωS e ωP
risultano molto
vicine tra loro, l’effetto di garantire una frequenza di oscillazione dipendente quasi esclusivamente
dalle caratteristiche del quarzo permane.
68
I quarzi possono essere realizzati a basso costo di produzione con accuratezza delle frequenze ωS e
ωP molto elevate, stabili nel tempo e indipendenti dalla temperatura. Sostituendo all’induttanza un
quarzo si possono realizzare, a basso costo, oscillatori con frequenza di risonanza affetta da errori
estremamente bassi (poche parti per milione o anche meno).
Un esempio circuitale è rappresentato in figura.
L’aggiunta di una capacità variabile consente di effettuare un tuning molto fine nell’intervallo tra
ωS e ωP.
I quarzi sono disponibili sul mercato per frequenze di risonanza da alcune centinaia di KHz fino al
centinaio di MHz. Oscillatori al quarzo in ambiente termostatato permettono stabilità in frequenza
di frazioni di parti per milione o di qualche parte per miliardo (10-9).
69
Capitolo 3
Mixer
Un mixer è un sistema che, alimentato da due o più segnali in ingresso, presenta in uscita un segnale
contenente prodotti non lineari dei segnali di ingresso. In generale il segnale di uscita può essere
rappresentato da una somma di termini ciascuno dei quali è una potenza di ordine diverso della
combinazione lineare dei segnali di ingresso. Nella sua realizzazione più semplice le porte di
ingresso sono due e l’uscita contiene un solo termine proporzionale al prodotto tra i due segnali
applicati agli ingressi. Per motivi “storici” e in dipendenza da quella che risulta essere
l’applicazione più frequente del mixer nei sistemi a radiofrequenza, le due porte di ingresso
prendono il nome di “porta a radiofrequenza” e “porta dell’oscillatore locale”, mentre quella di
uscita prende il nome di “porta a frequenza intermedia”. In figura è rappresentata l’applicazione
classica del mixer utilizzato per traslare in basso la frequenza del segnale ricevuto dall’antenna di
un ricevitore.
LNA
R.F.
MIXER
O.L.
F.I.
VRF (t ) = VRFM cos(ω RF t )
VOL (t ) = VOLM cos(ω OL t )
O.L
.
VFI (t ) = ∑ a n,m cos(nω OL − mω RF )t
n ,m
Il mixer “mescola” i 2 segnali di ingresso in maniera non lineare producendo segnali a frequenze
diverse, fra cui f FI 1 = f RF − f OL ed f FI 2 = f RF + f OL . Se l’obiettivo è quello di traslare in basso il
segnale ricevuto dall’antenna, si selezionerà la frequenza fFI1 alla quale daremo nel seguito il nome
di “frequenza intermedia”.
Consideriamo il caso di un segnale VRF(t) modulato in ampiezza a doppia banda laterale (DSB) con
portante fRF , applicato all’ingresso a radiofrequenza del mixer e sia f OL la frequenza del segnale
monocromatico applicato sulla porta dell’oscillatore locale. Il risultato è la traslazione dello spettro
alla frequenza differenza e alla frequenza somma (quest’ultima non rappresentata in figura).
70
f FI
f RF
f OL
f
V RF (t ) = V AM [1 + m a x(t )]cos(ω RF t )
Vediamo più in dettaglio e con qualche esempio come una non linearità possa dare origine al
termine prodotto. A tal fine supponiamo che il mixer si comporti come un sistema senza memoria
ovvero la cui tensione di uscita xu(t) all’istante t dipende solo dal valore assunto allo stesso istante
dalle tensioni di ingresso xi(t) e non dai valori assunti negli istanti precedenti. Nel caso di due soli
ingressi, x1 e x2,
immaginando di poter approssimare con una espansione polinomiale la
dipendenza non lineare di xu(t) dagli ingressi potremo scrivere:
xu = a1 ( x1 + x2 ) + a 2 ( x1 + x2 ) 2 + a3 ( x1 + x2 ) 3 + ...
Nel caso più semplice di due soli segnali di ingresso VRF e VOL con
VRF (t ) = VRFM cos(ω RF t )
VOL (t ) = VOLM cos(ωOLt )
xi = V RF (t ) + VOL (t )
sviluppando il termine quadratico si ottiene:
2
2
V RF
VOL
V V
M
a2 x = a2
(1 + cos(2ω RF t )) + M (1 + cos(2ω OL t )) + 2 RFM OLM cos((ωOL − ω RF )t ) + cos((ωOL + ω RF )t )
2
2
2
2
i
Un circuito che realizza in maniera estremamente semplice questo risultato è il FET, grazie alla sua
caratteristica parabolica. Nel seguito è rappresentato un mixer a FET nel quale il gruppo LC è
dimensionato in modo da risuonare alla frequenza fFI= (ωOL − ω RF ) /2π.
Si osservi che in continua risulta VGSo = − E , mentre la tensione gate-source è data da
VGS (t ) = − E + V RF (t ) − VOL (t ) nell’ipotesi che la capacità CA si comporti come un corto circuito alla
radiofrequenza e l’induttanza di blocco come un circuito aperto.
Sotto queste condizioni la corrente di drain, fornita dalla ben nota equazione parabolica per VGS
compreso tra 0 e la tensione di pinch-off VP, contiene un termine dipendente dal quadrato della
differenza tra VGS(t) e VOL(t).
71
ID
IDSS
VD
VP
V
I D = I DSS 1 − GS
VP
ID =
2
(
I DSS 2
VP − 2VGSVP + VGS2
VP2
)
Sviluppando il doppio prodotto si ottiene:
− 2V RFM VOLM
1
[cos((ω OL + ω RF )t ) + cos((ωOL + ω RF )t )]
2
L’ampiezza della componente a frequenza intermedia f FI = f OL − f RF risulta essere data da:
VFI M =
I DSS
VRFM VOLM RL .
V P2
3.1 Parametri caratterizzanti
In generale un mixer si caratterizza mediante un certo numero di parametri. Il più importante è il
Guadagno di Conversione GC (o il suo inverso: la perdita di conversione CL) definito come il
rapporto tra la potenza della componente a frequenza intermedia e la potenza disponibile del segnale
a radiofrequenza:
GC =
PFI
PARF
72
Si noti che PFI non rappresenta tutta la potenza che si misura sulla porta a f FI sulla quale sono
presenti anche altre componenti frequenziali oltre a quella a fFI, ma solo quella dovuta a quest’ultima
componente. Nel caso del FET prima esaminato:
I DSS
V RFM VOLM R L ) 2
2
VP
PFI =
2 RL
(
PARF =
2
V RF
M
GC = 4
8 RS
2
2
I DSS
VOL
M
VP4
RL RS
Si osservi che il guadagno di conversione non dipende dal segnale a radiofrequenza e, pertanto, la
componente a frequenza intermedia, a VOLM costante, risulta proporzionale, secondo la costante GC,
a quella a radiofrequenza, ovvero
PFI = GC PARF
A radiofrequenza si usa esprimere la potenza in dB milliwatt (dBm = 10 volte il logaritmo della
potenza misurata in milliwatt). In tal caso si ottiene
PFI
dBm
= 10 LogPFI [mW ] = 10 LogGC + 10 LogPARF [mW ] = GC
Se si riporta su un grafico PFI
dBm
in funzione di PARF
dBm
dB
+ PARF
dBm
si ottiene l’andamento descritto in figura:
10 log(PFI [mW ])
1W→0dB
1000mW→10log103→30dBm
10dB / dec
GC
dB
(
)
10 log PARF [mW ]
Un altro parametro importante è il punto di compressione a 1 dB (o 1dBCP) che si ricava attraverso
il seguente esperimento: si alimenta la porta a radiofrequenza con un segnale di ampiezza via via
73
crescente e, ogni volta, si misura la potenza a frequenza intermedia; il risultato delle misure si
riporta in grafico (linea continua in figura).
Il grafico costruito per via sperimentale presenta una deviazione dall’andamento lineare previsto. Il
punto di compressione a 1 dB è il valore della potenza disponibile a radiofrequenza in cui la curva
sperimentale si discosta di 1 dB dall’andamento lineare a tratteggio.
1dB
1dBCP
Di fatto è come se GC, da un certo valore di PARF in poi, cominciasse a diminuire. Si tratta di un
effetto in genere dovuto a non linearità di ordine superiore i cui effetti, oltre un certo livello del
segnale a radiofrequenza, non possono più essere trascurati.
Di norma il mixer viene usato con una PARF tale da mantenere il funzionamento al di sotto del punto
di compressione (da 3 a 6 dB sotto 1dBCP).
Isolamento.
Un altro parametro, o meglio una famiglia di parametri, e l’Isolamento che fornisce anch’esso una
misura dello scostamento da un comportamento ideale.
Il mixer si usa prevalentemente per traslare un segnale ad una frequenza desiderata e, su ciascuna
porta
è desiderabile avere, per diversi motivi, soltanto la componente che a quella porta compete. In
realtà, ciò non accade (si pensi a tutte le componenti diverse da quella a frequenza intermedia
presenti sulla porta a fFI). L’isolamento fornisce una misura della deviazione da questo
comportamento ideale.
74
.
MIXER
R.F.
F.I.
O.L.
Si possono definire fino a 6 tipi di isolamento, anche se, sostanzialmente, solo 3 sono di effettivo
interesse. Cominciamo col definire l’isolamento I RFFI della porta a RF sull’uscita a FI come il
rapporto tra la potenza disponibile a radiofrequenza e la potenza della componente a radiofrequenza
PA
sulla porta a FI: I RFFI = 10 log RF
PRFFI
Gli altri due isolamenti di interesse sono I OLFI , I OLRF definiti, con ovvio simbolismo, dalle seguenti
relazioni:
P ARF
P
OLFI
I OLFI = 10 log
PA
I OLRF = 10 log OL
POLRF
POLFI è la potenza della f OL misurata sulla porta a FI
POLRF è la potenza della f OL misurata sulla porta a RF
L’effetto dell’OL sulla porta a RF può essere particolarmente “fastidioso” nei ricevitori in quanto
rappresenta una componente alla frequenza dell’oscillatore locale che “fluisce” verso l’ingresso del
ricevitore. Poiché quello dell’oscillatore locale è sempre un segnale di notevole potenza (anche
qualche decina di dBm) di fatto un isolamento non infinito, nei confronti di questa componente, può
essere indice di un segnale che viaggia in direzione dell’antenna e che da questa può essere irradiato
con ovvie conseguenze negative in termini di interferenze e inquinamento elettromagnetico.
Il costruttore del mixer fornisce questi parametri all’interno di range frequenziali ben determinati
per le tre porte. Ciascun isolamento viene misurato in condizioni ben specificate. In figura è
rappresentata la configurazione circuitale per la misura di IRFFI:
50Ω
+
VRF
-
MIXER
50Ω
O.L
.
75
In uscita a frequenza f RF si
osserva una componente di
V
ampiezza RFM dalla quale si
ricava PRFFI
3.2 Mixer a moltiplicatore
Invece che utilizzando una non linearità, l’operazione di mescolamento (o mixaggio, con un brutto
neologismo) si può realizzare mediante dei moltiplicatori. Il caso più frequente è quello della
moltiplicazione per un’onda quadra q(t) che ha frequenza fondamentale pari a fOL. In figura è
rappresentata q(t) insieme col suo sviluppo in serie di Fourier.
q(t)
1
ω0 =
2π
T0
t
q (t ) =
∞
1
+∑
2 n =1
π
sin n
2
T0
n
π
con (nω 0t )
2
Il circuito in figura permette di ottenere in uscita una tensione proporzionale al prodotto di VS(t) per
l’onda quadra q(t):
Immaginiamo di aprire e chiudere il tasto con periodo T0
π
sin n
∞
RL
1
2
+∑
vu (t ) = VS
con(nω 0 t )
π
R L + R S 2 n =1
n
2
Per ottenere il risultato è necessario che il tasto sia comandato da un fenomeno periodico all
frequenza dell’oscillatore locale. Si può ottenere il risultato col circuito rappresentato nella figura
seguente che assume il nome di Mixer a diodi singolarmente bilanciato.
VOL è una tensione periodica di forma qualunque purchè di ampiezza sufficiente a mandare
alternativamente in conduzione o in interdizione i diodi. Nel semiperiodo in cui VOL è alta,
considerando Vγ=0 (trascurabile), tutti e quattro i diodi conducono ed è come se il tasto fosse
chiuso, nell’altro semiperiodo risultano interdetti ed è come se il tasto fosse aperto.
Nel seguito si effettuerà il calcolo del guadagno di conversione e l’isolamento per questo mixer.
:
76
PFI
PARF
GC =
con RS=RL=50Ω
V RF (t ) = V RFM cos (ωRF t )
1
2
V FI (t ) = V RF (t )q (t )
PFI =
V RF2
1 V RFM 2
cos (ω 0 − ω RF
2 4 π
)
ω0 =
2π
T0
M
4 ⋅ 2π 2 R L
P ARF =
GC =
V FI M =
V RF2
M
8R S
V RF2
M
8R S
2
2
4 ⋅ 2π R L V RF
M
=
4
π2
≅ 0.1
Solo il 10% della potenza a radiofrequenza viene convertita a FI: il GC è basso!
Se adesso calcoliamo l’isolamento della radiofrequenza sulla porta a frequenza intermedia
otteniamo
V RF −FI =
V RFM
4
I RF −FI =
P ARF
PRF −FI
=
V RF2 16 ⋅ 2R
L
M
=4
8R S V 2
RF M
¼ della potenza disponibile a RF si ritrova in uscita sulla porta a FI. L’isolamento è scadente e
corrisponde al fatto che una aliquota significativa della potenza a radiofrequenza non viene
convertita, ma ricompare in uscita. Per migliorare le prestazioni di questo mixer sia in termini di
77
guadagno che di isolamento, si utilizza una configurazione opportunamente modificata in cui
compare un’onda quadra bipolare (con valor medio nullo) a differenza di quella unipolare con valor
medio ½ utilizzata prima. E’, infatti, la presenza della componente continua nello sviluppo di q(t) a
degradare l’isolamento.
3.2.1 Mixer a diodi doppiamente bilanciato
Si tratta di una delle configurazioni più frequentemente utilizzate, quanto meno in realizzazioni
ibride (non integrate). In essa la moltiplicazione per l’onda quadra bipolare rappresentata in figura
π
sin n
2
q q (t ) = 2 ∑
cos(nω0t )
∞
n =1
n
π
2
è ottenuta con lo schema circuitale di principio seguente
V FI (t ) = V RF (t )
RL
RL + RS
1
2
q q (t ) = V RF (t )q q (t )
A cui corrisponde un’ampiezza della componente a frequenza intermedia pari a
V FI M = V RF M
211
2
π 22
PFI =
V RF2
M
2π 2 R L
E, quindi un guadagno di conversione pari a:
GC =
V RF2
2
M
8R S
2
2π R L V RF
M
=
4
π2
≅ 0.4
In questo caso tutti e tre gli isolamenti di interesse risultano, nel caso ideale, infiniti.
Mentre il mixer precedente era bilanciato solo nei riguardi dell’OL (singolarmente bilanciato),
questo lo è sia nei riguardi dell’OL sia nei riguardi dell’RF (doppiamente bilanciato).
La realizzazione circuitale sfrutta un ponte a diodi come in figura
78
1
D
RL
RS
2:1
2
1:2
C
VRF
A
VOL
4
3
B
RL
+ VFI -
I diodi conducono a coppie per effetto del segnale di comando sulla porta dell’oscillatore locale.
Quando VOL è nel semiperiodo positivo conducono i diodi 2 e 3 (VA=VB), mentre i diodi 1 e 4 sono
interdetti (VFI=VCB).
Quando VOL è nel semiperiodo negativo conducono i diodi 1 e 4 (VD=VA), mentre i diodi 2 e 3 sono
interdetti (VFI=VCD)
A parte un coefficiente moltiplicativo, il segnale viene trasferito sulla porta a FI per metà periodo
col suo segno e per metà perido cambiato di segno.
Dal punto di vista del primario (porta a RF) esso vede sempre sul secondario una resistenza RL in
entrambe i semiperiodi. La resistenza RL viene riportata sul primario moltiplicata per il quadrato del
rapporto spire. Nel seguito, con ovvio simbolismo, sono riportati i passaggi che conducono al
calcolo del guadagno di conversione.
4
5
2
= V RFM
5
V 1M = V RF M
V 2M
2
5
V FI M = V RF M 2
21
4
=
V RF M
π 2 5π
GC =
trasformatore
della
porta
RF:
essa
viene
moltiplicata per l’onda quadra e si ritrova ai capi
Pertanto:
V RF2
V2M è l’ampiezza della tensione sul secondario del
del carico RL sulla porta a FI.
M
25π
2
16 8R S
64
1
=
≅ ⇒ −6dB
2
2
2R L V
4
25π
RF
M
Questo tipo di mixer in configurazione ibrida trova applicazione fino a diversi GHz.
Si possono trovare le caratteristiche funzionali di diverse famiglie di mixer basati su questa
topologia sul sito: www.minicircuits.it.
79
CAPITOLO 4
RICEVITORI
Un ricevitore radio è un sistema in grado di ricevere, amplificare e demodulare un segnale radio
avente caratteristiche prefissate in termini di occupazione di banda e di schema di modulazione,
all’interno di una o più gamme (intervalli) di frequenza. Per fare ciò il ricevitore deve essere in
grado almeno di:
1) ricevere il segnale elettromagnetico mediante un’antenna;
2) amplificarlo mediante un amplificatore a radiofrequenza con cifra di rumore adeguata;
3) filtrare il singolo canale che si desidera ricevere, introducendo una attenuazione di livello
adeguato nei confronti di tutti gli altri segnali;
4) demodularlo estraendo dal segnale modulato le stesse informazioni contenute nel segnale in
banda base prima della sua modulazione e trasmissione.
4.1 Ricevitore supereterodina
L’architettura ampiamente più diffusa della parte frontale (dall’antenna al demodulatore) di un
ricevitore è quella nota come Supereterodina che risolve nella maniera più economica e
tecnologicamente abbordabile il problema dell’elevata selettività richiesta in molte applicazioni. Per
selettività si intende la capacità del ricevitore di trattare il segnale che si desidera ricevere in
maniera “differenziata” da quelli che, invece, costituiscono interferenza e, pertanto, dovrebbero
essere idealmente eliminati. Questa architettura, affermatasi fin dagli inizi dello sviluppo della
radio, fu ideata da Lucien Levy nel 1917 ma fu brevettata da Edwin Howard Armstrong nel 1918.
Questi fece sua l'idea di Levy che solo nel 1928, dopo una lunga vertenza giudiziaria, venne
riconosciuto come legittimo inventore.
L'utilizzo di una batteria di filtri a frequenza fissa, uno per ciascuna delle “stazioni” che si vogliono
ricevere, sarebbe antieconomico e fornirebbe un numero limitato di stazioni ricevibili. D'altro canto
realizzare un solo filtro a frequenza variabile che copra tutto lo spettro radio sarebbe troppo difficile
e
costoso
(specialmente
con
le
tecnologie
disponibili
agli
albori
della
radio).
Sì pensò, quindi, fin dagli inizi ad un sistema in grado di convertire le frequenze ricevute ad una
80
frequenza fissa chiamata frequenza intermedia fFI alla quale operano tutti i circuiti di filtraggio e
demodulazione successivi.
Questo risultato si ottiene utilizzando un mixer e scegliendo opportunamente la frequenza fOL con il
quale far “battere” il segnale ricevuto applicandola sulla porta del mixer riservata all’oscillatore
locale. Posizionando intorno alla frequenza fFI un filtro selettivo, sarà poi possibile filtrare il segnale
desiderato, eliminando tutti quelli che si trovano fuori dalla banda del filtro. Per ottenere lo stesso
risultato sarebbe, altrimenti, necessario utilizzare un filtro passa banda con frequenza centrale pari a
fRF da posizionare subito dopo l’antenna o il LNA (v. figura). Questa seconda soluzione è
estremamente difficile e più costosa da realizzare. È, infatti, molto complicato dal punto di vista
tecnologico, realizzare filtri altamente selettivi (ad alto fattore di qualità) che presentino, al
contempo, frequenza centrale variabile.
Filtro
passa-banda
Tanto per fissare le idee, immaginiamo di voler selezionare un singolo canale per una
comunicazione secondo il più diffuso standard di telefonia mobile: il GSM. In questo caso la
larghezza di banda di un canale è 200 KHz , mentre la frequenza centrale può essere intorno ai 2
GHz. Per ottenere il risultato sarebbe necessario un filtro a frequenza variabile su tutta la gamma di
frequenze assegnata al segnale (da 30 a 60 MHz a seconda degli standard) con Q=10.000: si tratta
di una soluzione non realizzabile in pratica a causa del limite non superiore a qualche centinaio del
fattore di qualità di componenti reattivi (induttanza o capacità) di valore variabile.
Quindi, invece di spostare il filtro sulle frequenze volute si fa la cosa opposta: si trasla il segnale a
bassa frequenza dove può essere filtrato più agilmente. Per traslare il segnale lo si moltiplica per
un’oscillazione a frequenza opportuna in modo che uno dei prodotti della moltiplicazione
(tipicamente il segnale a frequenza differenza) cada in corrispondenza della frequenza intermedia
prescelta. Infatti, gli oscillatori variabili sono più facilmente realizzabili dei filtri a frequenza
variabile. Lo schema base di un ricevitore supereterodina è rappresentato in figura
81
LNA
MIX
AFI
OL
Questa architettura, ampiamente la più diffusa da quasi 90 anni, introduce, però, un problema:
quello della frequenza immagine. Infatti, sia il canale che si desidera ricevere, sia qualunque altro
interferente situato in posizione simmetrica a questo, rispetto alla frequenza dell’oscillatore locale,
vengono traslati, per effetto della moltiplicazione, in corrispondenza della frequenza intermedia.
Per comprendere meglio il problema conviene descrivere un esempio specifico e fare riferimento ad
uno standard relativo ad un servizio esistente. Utilizziamo, a questo fine, lo standard per la
radiodiffusione in modulazione di ampiezza ad onde medie.
Al servizio è destinata la banda che va da 540 kHz ÷ 1.6 MHz, sulla quale sono identificati 106
canali distanzianti di 10 KHz. Ciascun canale “ospita” un segnale a radiofrequenza modulato in
ampiezza da un segnale audio la cui banda va da 300 Hz a 4.5 kHz (v. figura).
Per selezionare un singolo canale si dovrebbe disporre di un filtro con frequenza centrale variabile
nel range [540 kHz ÷ 1.6 MHz] dotato di un fattore di qualità: Q ≅
f 0max
B f RF
=
1.6MHz
> 160
10kHz
Un dispositivo di questo tipo risulterebbe irrealizzabile oppure estremamente costoso. Si adotta,
pertanto la soluzione supereterodina. Per ottimizzare la realizzazione del filtro a frequenza
intermedia, le associazioni di costruttori hanno deciso di utilizzare tutti la stessa frequenza
82
intermedia: fFI = 455 kHz . Si è ottenuta, in tal modo, una forte riduzione dei costi dovuta all’ovvio
effetto di una economia di scala.
4.1.1 Problema della frequenza immagine
Vediamo, adesso, in cosa consiste il problema della frequenza immagine fIM. Il mixer oltre a traslare
il canale a fRF a frequenza fFI = fOL-fRF trasla nella stessa posizione sull’asse delle frequenze anche il
segnale a frequenza fIM tale che fIF = fIM - fOL. (v. Figura)
Pe risolvere il problema, basta inserire, prima del mixer, un filtro che introduca una attenuazione
adeguata in corrispondenza della frequenza immagine a 1450 kHz. L’architettura del front end
viene, dunque, modificata come in figura:
LNA
MIX
AFI
OL
Il filtro per la frequenza immagine (di norma denominato “filtro a radiofrequenza” per distinguerlo
da quello contenuto nell’amplificatore a frequenza intermedia detto anche “filtro di canale”) deve
avere selettività adeguata e attenuare la fIM di una quantità che varia da una trentina ad una
settantina di dB, a seconda delle applicazioni.
Esso deve essere “accordato” con l’oscillatore locale e variare la sua frequenza centrale di pari
passo a quella generata da quest’ultimo. Gli intervalli (o gamme di frequenza) occupati dal segnale
83
a radiofrequenza, dall’oscillatore locale e dalla frequenza immagine, sono riportati con ovvio
simbolismo in figura.
BIM
BOL
BRF
fFI = 455 kHz
540
995
1450
1600
2055
2510
fRF є 540 ÷ 1600 kHz : BRF
fOL є 995 ÷ 2055 kHz : BOL fOL = fRF + fFI
fIM є 1450 ÷ 2510 kHz : BIM
fIM = fOL + fFI
Come si può osservare, l’intervallo della radiofrequenze (BRF ) e quello della frequenza immagine
(BRF) sono parzialmente sovrapposti e questo impedisce, sia pure a livello teorico, di utilizzare un
filtro a frequenza fissa con banda passante corrispondente all’intervallo BRF in Figura e banda
bloccata corrispondente all’intervallo BIM. Nel caso in cui la frequenza intermedia fosse risultata
abbastanza elevata da fari si che i due intervalli risultassero sufficientemente lontani, il filtro a
radiofrequenza avrebbe potuto essere a frequenza fissa.
Per quanto riguarda il filtro a radiofrequenza, le realizzazioni più semplici prevedono l’utilizzo di
una topologia del tipo in Figura
Dove la capacità variabile era ottenuta, in tempi passati, modificando, mediante la rotazione di una
manopola di sintonia, la geometria di un condensatore ad armature piane, attualmente con l’utilizzo
di un varicap. In ambedue i casi, comunque, risulterebbe difficile ottenere dei valori del fattore di
qualità QV > 30.
Valori del fattore di qualità significativamente più elevati possono essere ottenuti nel caso di filtri a
parametri concentrati (L/C/R) a frequenza centrale fissa: QF ~ 100 ÷1000. Molto meglio si può fare
84
con filtri monolitici, come quelli al quarzo, che permettono di superare agevolmente il valore di
1000.
4.1.2 Architettura supereterodina a doppia conversione
Sembrerebbe risolto, con il ricevitore supereterodina e l’utilizzo del filtro a radiofrequenza, il
problema della ricezione selettiva del canale. Le cose, invece, non stanno esattamente così poiché la
scelta della fFI può comportare delle complicazioni.
Facciamo, ancora una volta, riferimento ad un caso reale: il servizio di comunicazione tra stazione
a terra e aeromobili. A questo servizio è assegnata la banda la banda 117 ÷ 136 MHz. La banda
destinata a ciascun canale è pari a 10 kHz. Immaginiamo di disporre di filtri RF a Q variabile con
un Q massimo pari a QV = 30 e filtri a frequenza centrale fissa con QF = 100 .
Lo schema del front end supereterodina è quello seguente:
QV
QF
LNA
MIX
Elimina la fIM
AFI
OL
La frequenza intermedia fFI è legata al fattore di qualità del filtro AFI e alla larghezza di banda del
singolo canale Bch.
QF =
f FI
⇒ f FI = QF Bch = 100 × 10kHz = 1MHz
Bch
Dovremmo, quindi, per ricevere le frequenze nell’intervallo [117 ÷ 136] MHz, traslare il canale da
ricevere a 1MHz.
La banda coperta dall’OL sarà [118 ÷ 137] MHz e l’intervallo delle frequenze immagine sarà [119
÷ 138] MHz. Quanto appena detto è schematizzato nella figura seguente:
BIM
BOL
fFI
f(MHz)
1
117 118 119
85
136 137 138
Gli intervalli di frequenza della delle fIM e della fRF si sovrappongono: per questo è necessario
utilizzare un filtro a RF con frequenza centrale variabile il quale presenterà, però, un Qmax = 30. In
tal caso la banda passante BFRF sarà ricavabile come segue:
QV =
f RFmax
BFRF
⇒ BFRF =
f RFmax
QV
=
136MHz
= 4.5MHz
30
Pertanto la fIM che si trova a 138 MHz, quindi dentro la banda del filtro RF, e non viene attenuata,
mentre si desidera, tipicamente, introdurre un’attenuazione della fIM di almeno 40dB.
Il problema si risolve modificando la struttura proposta nella maniera rappresentata in Figura dove è
rappresentata una architettura del tipo “a doppia conversione”. Il principio di funzionamento è
descritto nel seguito.
Si passa, utilizzando un mixer ed un oscillatore locale a frequenza variabile, ad una prima frequenza
intermedia, superiore rispetto a quella finale alla quale si realizza il filtraggio di canale. Quindi si
opera una seconda traslazione tra la prima e la seconda frequenza intermedia utilizzando un
oscillatore locale a frequenza fissa. Il fatto che fFI1 sia molto maggiore di fFI2 permette di
“allontanare” la frequenza immagine della prima conversione così da poter ridurre la selettività
richiesta al filtro a RF.
.
fc
LNA
fRF
MIX1
AFI1
fFI1
OL1
MIX1
AFI1
fFI2
OL2
Vediamo un possibile dimensionamento dei blocchi del front end.
In uscita dall’AFI2 , centrato sulla frequenza centrale fFI2, avremo il canale che si desidera
ricevere. Il valore di questa frequenza intermedia è fissato dalla relazione:
f FI 2 = QF ⋅ Bch = 1MHz (con QF=100).
La prima frequenza intermedia fFI1 si ricava imponendo che la frequenza immagine della prima
conversione fIM1 sia “sufficientemente lontana dal canale che si desidera ricevere centrato su fRF.
Per esempio:
f IM1 = 1.5 ⋅ f FRF = 204 MHz
86
(si è assunto f FRF = 136 MHz che è la situazione peggiore).
fFI
f
fRF
fOL
fIM
L’oscillatore locale si troverà a metà strada tra fRF e fIM
f − f IM
204 − 136
f FI1 = RF
=
MHz = 34 MHz . Esso deve coprire un intervallo di frequenze tra fOLmin
2
2
e fOLmax
fOLmin = 117 + 34 = 151MHz
fOLmax = 136 + 34 = 170 MHz
L’oscillatore locale 2 produrrà una frequenza fissa pari a 35MHz: esso deve permettere la
traslazione di segnale in posizione fissa a 34MHz(fFI1) e lo portarlo a 1MHz.
Potrebbe ancora verificarsi il problema della frequenza imagine sulla seconda conversione: è
opportuno verificare che ciò non accada. Il filtro AFI1 deve essere in grado di reiettare la seconda
frequenza immagine fIM2. E’ un filtro a frequenza fissa con
BAFI1 = 340kHz =
f FI1
Q
=
Q > 100 pertanto
34MHz
100
La fIM2 è chiaramente fuori dalla banda del filtro che presenterà dei fianchi molto ripidi (Q>100) e,
pertanto verrà pesantemente attenuata. Per una valutazione esatta bisognerebbe, comunque,
conoscere con precisione la tipologia e l’ordine del filtro utilizzato.
f
1
34 35
36
Potrebbe accadere ( anche se è estremamente raro) che due conversioni non siano sufficienti, in tal
caso si può arrivare a 3 o più. L’attuale disponibilità di filtri monolitici a frequenza centrale fissa e a
basso costo scongiura, di fatto, questa eventualità.
87
4.2 Filtri monolitici passivi
Esistono diverse tecnologie per realizzare filtri a frequenza fissa con caratteristiche particolarmente
spinte in termini di selettività. Fra queste la più diffusa, anche per il costo abbastanza contenuto, è
quella basata sull’utilizzo di cristalli di quarzo opportunamente sagomati. Il materiale utilizzato ha
caratteristichistiche piezoelettriche, ovvero a fronte dell’applicazione di una tensione tra due facce
di un parallelepipedo il materiale piezoelettrico presenta una microdeformazione e, viceversa, se,
applicando una forza opportuna si causa una deformazione, allora si osserva su direzioni ortogonali
a quelle della deformazione, una differenza di potenziale. Si tratta, di fatto, di un sistema in grado di
trasformare sollecitazioni elettriche in meccaniche e viceversa. La struttura di un filtro al quarzo è
rappresentata in maniera schematica in figura.
+
+
Vin
Vu
La sollecitazione meccanica causata dall’applicazione di
una tensione variabile Vin tra due metallizzazioni deposte ad
una estremità del cristallo di quarzo, si propaga attraverso lo
stesso e viene rilevata tra due placche metalliche poste
all’altra estremità sotto forma di tensione variabile Vu.
-
-
Il comportamento del sistema è molto selettivo in frequenza
ed il modulo della risposta Vu/Vin ha un andamento del tipo rappresentato in figura.
I filtri al quarzo, da unto di vista elettrico, possono essere schematizzati con una rete a scala in cui i
tratti orizzontali sono costituiti da circuiti risonanti serie e quelli verticali da circuiti risonanti
parallelo, ambedue alla stessa frequenza di risonanza f0.
LS
CS
CS
LS
+
.
+
Vin
LP
Vu
CP
-
-
88
Il filtro viene caratterizzato inserendolo
RS
+
Vout
VS
in un circuito del tipo in figura con RS =
RL= 50Ω
RL
-
In corrispondenza di f0 un filtro ideale
dovrebbe
fornire
un
valore
dell’asttenuazione pari a 0 dB ovvero un guadagno di trasduttore GT = 1. In realtà si hanno perdite
dell’ordine di 1 dB per i filtri al quarzo e di 2-4 dB per i filtri ceramici (una tipologia molto simile,
ma con prestazioni inferiori a fronte di un minor costo).
I filtri ceramici si trovano in commercio da 100 kHz fino a qualche decina di MHz mentre quelli al
quarzo hanno un range più ampio, da 100 kHz fino a oltre 100 MHz. Il fattore di qualità Q definito
come rapporto tra la frequenza centrale e la banda passante è, al massimo, di qualche centinaio per i
filtri ceramici e di qualche migliaio per quelli al quarzo. Sebbene abbiano dimensioni di pochi
millimetri non sono compatibili con le tecnologie di fabbricazione dei circuiti integrati e, pertanto,
non sono integrabili. Quindi l’uso di un filtro al quarzo nella catena di ricezione costringe ad uscire
fuori dal chip, filtrare e rientrare. Si hanno così costi elevati di realizzazione, consumo di potenza
per pilotare i circuiti capacitivi connessi alla presenza dei pad di ingresso e uscita dal chip e, inoltre,
un aumento delle dimensioni ed una riduzione dell’affidabilità.
Tabella riassuntiva
Perdite
Frequenze (Hz)
Qmax
Prezzo
Al quarzo
1 dB
105 ÷ 108
2000
~€
Ceramici
3-4 dB
105 ÷ 106
500
~ 0.50 €
Un’altra tipologia di filtri monolitici per radiofrequenza è quella dei Filtri SAW (Surface Acustic
Wave) . Si tratta di blocchi di materiale piezoelettrico su cui sono realizzate metallizzazioni con
opportune geometrie interdigitate che permettono di ottenerere una risposta in frequenza selettiva e
sagomata in maniera particolare. Sono disponibili in commercio fino a frequenze di qualche GHz..
4.3 Parametri caratterizzanti di un ricevitore
I principali parametri che caratterizzano il front end di un ricevtore sono elencati e brevemente
descritti nel seguito.
Selettività: misura la capacità del ricevitore di reiettare i canali indesiderati.
89
Si misura come segue: con un generatore si impone un certo segnale a frequenza fRF e si rileva la
potenza in uscita dall’AFI in condizioni di perfetta sintonia (potenza massima in uscita).
Quindi, mantenendo la sintonia dell’oscillatore locale si varia la frequenza del segnale in ingresso di
una quantità ∆f e si rileva la nuova potenza del segnale in uscita dall’AFI senza modificare la
sintonia. Adesso il segnale in uscita all’AFI non è più centrato su fFI, ma spostato di una quantità
pari a ∆f e, di conseguenza, l’uscita risulta attenuata rispetto al caso precedente..
La selettività è data dal rapporto, espresso in dB, di queste due potenze rispetto al ∆f (ad es: 30dB a
100kHz).
Sensibilità: è la potenza disponibile in ingresso che garantisce un rapporto segnale-rumore
prefissato sull’uscita a frequenza intermedia.
S FI
=R
N FI
In uscita dall’AFI si ha un segnale a cui è sovrapposto del rumore. Il segnale è intelligibile se il
rapporto segnale-rumore è maggiore di una certa soglia. Un valore abbastanza frequente di tale
soglia può essere 10.
Variando l’ampiezza del segnale in ingresso si cerca il valore in corrispondenza del quale il
rapporto segnale-rumore in uscita è proprio quello voluto (ad es:10). La potenza disponibile
corrispondente a tale ampiezza stabilisce la sensibilità.
SiRF
Cifra di rumore: con ovvio simbolismo si definisce come segue NFRIC =
su FI
NiRF
Nu FI
Reiezione alla frequenza immagine
Si definisce con un esperimento. Si mette in ingresso un generatore di segnale a frequenza fRF. Si
sintonizza l’OL e si misura la potenza sull’uscita a frequenza intermedia PFIRF. Senza cambiare la
sintonia si manda in ingresso un segnale alla frequenza immagine fIM si rimisura il nuovo valore
della potenza sull’uscita a frequenza intermedia PFIIM.
90
P
- Si definisce la reiezione alla frequenza immagine come 10 ⋅ log FIRF .
PFIIM
Allo stesso modo si opera inviando in ingresso, invece che la frequenza immagine, quella
intermedia fFI. Si definisce, con ovvio simbolismo la reiezione alla frequenza intermedia come
P
10 ⋅ log FIRF
PFIFI
. Il fatto che la fFI sia presente sull’uscita a frequenza intermedia è dovuto ad un
cattivo isolamento della porta a radiofrequenza su quella a frequenza intermedia del mixer.
4.4 Esempi di ricevitori per alcuni servizi di radiotrasmissione
In questa sezione esaminiamo alcuni esempi di ricevitori per determinati standard trasmissivi.
4.4.1 Ricevitore per radiodiffusione in modulazione di ampiezza a onde medie.
Questo standard prevede di utilizzare un range di frequenze fra 540 kHz ÷ 1.6 MHz. Ciascuno
canale porta l’informazione modulata in ampiezza a doppia banda laterale con portante relativa ad
un segnale audio la cui banda va da 300 Hz a $.5 kHz e, pertanto, occupa una banda di 9 kHz. Le
frequenze centrali di canali adiacenti distano 10 kHz.
Nel dimensionare il front end partiamo dall’ipotesi, realistica ai tempi in cui lo standard è nato, di
poter disporre per il filtraggio a frequenza intermedia di filtri con QF = 50. Sotto queste condizioni
la frequenza centrale fFI dello stadio a frequenza intermedia è data dalla seguente relazione:
QF =
f FI
⇒ f FI = QAFI ⋅ Bch = 450kHz
Bch
si usa fFI ~ 455 kHz (per un accordo tra i costruttori)
Talvolta il LNA non viene utilizzato su questo tipo di applicazione poiché nel range di frequenze
assegnate al servizio i disturbi sono di livello elevato e la potenza disponibile del segnale in antenna
deve essere abbastanza alta per permettere la ricezione, per cui non è richiesta bassa cifra di rumore.
MIX
AFI
OL
455 MHz
91
DEMOD
In tal caso il filtro a radiofrequenza è seguito direttamente dal mixer.La demodulazione del segnale
AM si effettua con un rivelatore asincrono costituito da un circuito identico al raddrizzatore a filtro
capacitivo a singola semionda.
Demodulatore a rivelatore di inviluppo
Questo tipo di demodulatore è detto asincrono perché non richiede la ricostruzione della portante.
Forniamo alcune indicazioni per il suo corretto dimensionamento:
RC è la costante di tempo con cui il condensatore si scarica sulla resistenza R quando il diodo si
sgancia. R deve essere di valore abbastanza elevato affinchè la costante di tempo τ =RC causi una
scarica sufficientemente lenta. Poiché durante la scarica la tensione sul diodo è VC = Vmax e
deve avere
τ
−
t
τ
si
>> TFI = 2p/fFI affinché la tensione VC non si allontani in maniera significativa
dall’inviluppo (vedi figura). Quindi : RC >>
2π
ω FI
VAM 1 + ma x ( t )
x ( t ) < 1
ma < 1
C
R
VAFI = VAM (1 + ma x ( t ) ) cos (ω FI t )
Esempio:
C = 0.1 µF (elevata)
ωFI ~ 2π500 kHz
TFI = 2µs
→ τ = 10 TFI = 20µs
RC = τ → R = τ/C = 200Ω
92
La costante di tempo
τ,
comunque, deve avere anche un limite superiore altrimenti la scarica
risulterebbe troppo lenta e la tensione VC non riuscirebbe a seguire l’inviluppo; in altri termini, il
demodulatore tenderebbe a funzionare come rivelatore di picco. Per valutare il massimo valore di t
compatibile con un corretto funzionamento del demodulatore imponiamo la condizione che la
velocità di scarica sia, in modulo, maggiore della “velocità” con la quale varia l’inviluppo, ovvero
della derivata rispetto al tempo dell’inviluppo medesimo. Supponiamo, per semplificare, che
l’inviluppo abbia andamento cosinusoidale con pulsazione W.
inviluppo
Scarica troppo
lenta
Scarica troppo
veloce
x ( t ) = cos ( Ωt )
si considera t* come l’istante di inizio della scarica
∂
( inviluppo ) = −VAM ma Ω sin ( Ωt *)
∂t
∂
∂
V
−t
( scarica ) = VAM (1 + ma cos ( Ωt *) ) e τ = − AM (1 + ma cos ( Ωt *) )
∂t
∂t
τ
Si impone la seguente condizione:
VAM
τ
(1 + m
a
cos ( Ωt *) ) > VAM ma Ω sin ( Ωt *) ⇒ τ <
Per ogni t* si ottiene un
τ
1 + ma cos ( Ωt *)
ma Ω sin ( Ωt *)
diverso: affinchè la condizione sia sempre verificata è necessario e
sufficiente che lo sia in corrispondenza del valore di t* per cui l’espressione a destra della
disuguaglianza è minima. ovare il
τ che corrisponde al minimo. Si cerca il minimo in funzione di
t*:
93
∂ 1 + ma cos ( Ωt *)
2
= 0 ⇒ −ma Ω sin ( Ωt *) ma Ω sin ( Ωt *) − (1 + ma cos ( Ωt *) ) ma Ω cos ( Ωt *) = 0
∂t ma Ω sin ( Ωt *)
cos ( Ωt *)
−ma2 Ω2 sin 2 ( Ωt *) − ma Ω 2 cos ( Ωt *) − ma2 Ω2 cos 2 ( Ωt *) = 0 ⇒ ma 1 +
ma
Il valore di t* per cui si ottiene il minimo è quello per cui: cos ( Ωt *) = −ma
In corrispondenza si ottiene:
τ<
1 − ma2
ma Ω 1 − ma2
=
1 − ma2
ma Ω
Nel caso in cui il segnale non sia monocromatico, la valutazione di massimo si fa sostituendo a Ω
la Ωmax del segnale.
τ max =
1 − ma2
ma
ma Ω max
τ min
0.9 ⇒ τ max
1
2Ω max
100 µ s
20 µ s
Facciamo adesso alcune considerazioni sull’ampiezza che l’inviluppo deve assumere per una
corretta rivelazione. Immaginando di utilizzare n diodo al germanio con Vγ = 0.3 V, deve risultare
vIN = v AFI = VAM 1 + ma x ( t ) cos (ω FI t ) > Vγ ∀t
L’inviluppo varia con x(t) e sappiamo che |x(t)| < 1 quindi nel caso peggiore x(t) = -1
VAM(1-0.9) > 3V = 10Vγ → VAM > 30V
Per ottenere questo risultato, ovvero un amplificatore a frequenza intermedia con ampiezza
massima della tensione di uscita pari a 30 V, bisognerebbe utilizzare una tensione di alimentazione
ancora maggiore: soluzione incompatibile con i limiti di ingombro, peso e autonomia di qualunque
sistema portatile. Per ovviare a questo inconveniente si può utilizzare un altro tipo di rivelatore:
quello sincrono.
Rivelatore sincrono.
Questa soluzione è descritta in figura
94
MIX
RF
AFI
FI
OL
LIM
OL
Filtro passa-basso
che elimina le
componenti a 2ωFI
Moltiplicando VAFI = VAM 1 + ma x ( t ) cos (ω FI t ) per cos(ωFIt) l’inviluppo viene moltiplicato per
1
1 + cos ( 2ω FI t )
2
un termine del tipo
Il filtro passa basso elimina la componente dell’inviluppo modulata a frequenza 2 fFI
Il limitatore si realizza con un semplice comparatore, ovvero con un sistema avente la seguente
caratteristica ingresso uscita che, alimentato col segnale modulato, genera un’onda quadra come
quella rappresentata in figura, mediante la quale si può pilotare, ad esempio, un mixer a diodi
doppiamente bilanciato che funge da moltiplicatore.
Vu
Segnale
modulato
AM
Vo
Vi
t
-Vo
t
In tal caso il moltiplicatore necessita di una tensione > 2Vγ per funzionare correttamente.
95
Controllo automatico del guadagno.
Esaminiamo, adesso, un problema tipico dei ricevitori per segnali modulati in ampiezza: quello del
fading. .Poichè le caratteristiche del canale variano in maniera imprevedibile per diverse ragioni,
l’ampiezza della portante è soggetta ad una variabilità che può essere anche di ordini di grandezza
nel giso di pochi minuti (ad esempio nel caso di un ricevitore su un mezzo che si muove ad alta
velocità in ambiente urbano), In realtà VAM è una funzione del tempo lentamente variabile:
VAM = VAM(t). Si tratta, comunque, di fluttuazioni molto lente il cui spettro è centrato intorno alla
continua e si estende, al massimo, fino a frequenze di qualche Hertz (v. figura)..
VAM(ω)
ω
Il problema si risolve utilizzando un anello di controllo che prende il nome di controllo automatico
del guadagno (CAG). Si tratta di prelevare dall’uscita demodulata un segnale proporzionale
all’ampiezza della portante ed utilizzarlo per controllare il guadagno dell’AFI, come
schematicamente rappresentato in figura.
Ovviamente il sistema deve agire in modo tale che, a fronte di un aumento dell’ampiezza della
portante il guadagno dell’AFI venga ridotto e,viceversa, esso venga aumentato a fronte di una
diminuzione. Bisogna utilizzare un amplificatore con guadagno controllabile mediante una tensione.
Si ottiene il risultato, ad esempio, usando la tensione VAM per controllare il punto di riposo di un
96
transistore il cui gm viene, in questo modo, modificato opportunamente agendo, in tal modo, sul
guadagno totale dell’AFI.
Tenuto conto di tutte le osservazioni fatte in precedenza circa la necessità di controllare l’ampiezza
della portante in uscita all’AFI, si perviene ad uno schema circuitale del tipo rappresentato in figura
in cui l’ampiezza VAM(t) viene utilizzata per modificare il punto di riposo del transistore 1
dell’AFI.
DEMODULATORE
MIX
RF
AFI
FI
ABF
OL
LIM
OL
VAM(t)
VAM ( t ) 1 + ma x ( t )
Vcc
RL
R1
DEMOD
VFI=VIN
1
Ic2
R2
VAM(t)
2
97
4.4.2 Ricevitore per radiodiffusione in modulazione di frequenza
Un segnale linearmente modulato in frequenza dal segnale x(t) ha la seguente forma:
VFM ( t ) = VFM cos (ω RF t + θ ( t ) )
t
dove θ ( t ) = ω D ∫ x ( t ) dt . ϕi ( t ) = ω RF t + θ ( t ) rappresenta la fase istantanea e la sua derivata la
0
pulsazione istantanea il cui scostamento dalla pulsazione della portante è dato da:
θ& ( t ) = ω D x ( t )
Per convenzione, si assume che che |x(t)| < 1 in modo tale che la quantità ωD<<wRF rappresenti la
massima deviazione della pulsazione istantanea dalla pulsazione della portante wRF.
Definiamo:
fD =
ωD
deviazione di frequenza
2π
D=
fD
indice di modulazione
Bm
Bm : banda del segnale modulante x(t)
Calcolare lo spettro del segnale non è facile. Per valutare la banda occupata dal segnale modulato si
sfrutta una relazione dovuta a Carson che, sotto certe ipotesi, permette di individuare l’intervallo di
frequenze, detto banda di Carson BC, che contiene buona parte dell’energia del segnale modulato:
BC = 2 Bm ( D + 1)
Come esempio di riferimento analizziamo lo standard che regola il servizio di radiodiffusione FM.
L’intervallo di frequenze assegnato al servizio dal Piano Nazionale delle fequenze è compreso tra
88 e 108 MHz . Risulta, inoltre:
Bm = 30 Hz ÷ 15kHz
BC = 180kHz
D=
BC
−1 5
2 Bm
D=
fD
⇒ fD
Bm
75kHz
Esaminiamo una possibile procedura di dimensionamento del front end il cui schema a blocchi è
rappresentato nella seguente figura. Come si vedrà, in questo caso, almeno in linea di principio, il
filtro a radiofrequenza può essere fisso dal momento che il range della radiofrequenza e quello della
frequenza immagine risultano separati.
98
LNA
MIX
AFI
OL
Il filtro a frequenza intermedia che immaginiamo contenuto all’interno dell’AFI è, come nel caso
precedente, quello che seleziona il canale che si desidera ricevere. Supponiamo anche questa volta
che, per renderne possibile la realizzazione a basso costo il suo fattore di qualità sia QF ~ 50,
pertanto risulta fFI = QFBC ~ 10MHz
Per mantenere il range della frequenza immagine separato da quello della radiofrequenza (vedi
figura) le associazioni di costruttori concordarono agli inizi un valore di fFI = 10.7MHz.
∆fOL
∆fIM
∆fRF
109.4
10.7
88
98.7
108
f
118.7
129.4
Questa scelta, come già detto, consente di usare come filtro di antenna un filtro a frequenza fissa
che faccia passare tutto l’intervallo ∆fRF reiettando quello ∆fIM.
L’utilizzo per il filtro a radiofrequenza di un filtro fisso (eventualmente di tipo monolitico) permette
di contare su una forte reiezione nella banda bloccata (dove cade la frequenza immagine) e, quindi,
di immaginare una soluzione a singola conversione.
Una volta traslato il segnale a frequenza fFI = 10.7MHz e filtrato il singolo canale, il demodulatore
deve estrarre l’informazione che s causate dalle variazioni delle caratteristiche del canale.
Se si fa passare il segnale VFM AFI = VFM A cos (ω FI t + θ ( t ) ) attraverso un derivatore si ottiene in uscita
VFM A ω FI + θ& ( t ) sin (ω FI t + θ ( t ) )
ovvero, un segnale modulato in ampiezza oltre che in frequenza (si ricordi che wD<wRF e, quindi
ω FI + θ& ( t ) > 0 ).
99
Tramite un rivelatore d’ampiezza si può estrarre l’inviluppo e, quindi, la sua componente variabile
proporzionale a x(t). In definitiva il demodulatore può essere realizzato secondo lo schema a
blocchi di figura::
AFI
VFM A ω FI + θ& ( t )
RIVEL
INVIL
DERIV
Si ottiene in uscita un segnale
proporzionale all’inviluppo
θ& ( t ) = ω D x ( t )
Mediante un filtro passa alto con limite inferiore di banda di alcuni Hertz, si può eliminare la
componente continua .
VFM Aθ& ( t ) = VFM A ω D x ( t )
Per risolvere il problema del fading che rende VFMA una funzione dipendente, sia pure lentamente,
dal tempo ( VFM A = VFM A ( t ) ) si fa passare il segnale modulato, prima della demodulazione,
attraverso un limitatore che produce in uscita un’onda quadra di ampiezza 2V0 picco-picco
indipendentemente dall’ampiezza della portante.
Vu
V0
AFI
Vi
LIMIT.
VU
Vi
-V0
La tensione a onda quadra VU così ottenuta ( si ricordi che si tratta, comunque, di un’onda quadra
modulata in frequenza a banda stretta) si filtra con un filtro passa banda centrato sulla frequenza fFI
in modo da filtrare la componente spettrale centrata sulla prima armonica.
100
3ωFI
ωFI
In
definitiva
AFI
lo
schema
5ωFI
a
blocchi
del
LIM
Vf
demodulatore
DERIV
Passa-banda a
frequenza fissa
diventa
il
seguente:
RIV.
INV.
Passa-alto
per eliminare
la continua
Non è richiesto il controllo automatico del guadagno purchè l’ampiezza della portante sia in grado
di mandare in saturazione l’uscita del limitatore.
Ampiezza minima
della portante
Esaminiamo adesso una possibile soluzione circuitale per
la realizzazione del derivatore. Si
potrebbe usare un circuito derivatore basato sull’utilizzo di un amplificatore operazionale a larga
banda come in figura:
dvi
dt
dv
vu = − RC i
dt
i (t ) = C
Oppure un amplificatore trans-conduttivo con carico induttivo come realizzato mediante un FET
come in figura
101
.
Il circuito equivalente, con le consuete ipotesi, è il seguente:
Dove vu = − g m vgs jω L
ovvero
id = g m vgs
dvgs
vu = − Lg m
dt
Il “guadagno” del derivatore è il rapporto tra il modulo della tensione di ingresso e quello della
tensione di uscita, ovvero wFILgm.
102
Il guadagno di rivelazione del sistema è tanto più elevato quanto più la retta è inclinata, ovvero
quanto più L è grande.
In realtà e facile dimostrare che il carico induttivo può essere sostituito da una qualunque
impedenza ZQ il cui modulo risulti essere una funzione lineare della frequenza solo nella banda
occupata dal segnale modulato. Questa funzione può essere assolta da un filtro RLC con una
frequenza di risonanza prossima, ma non uguale a fFI. Se fFI cade nella zona a sinistra della
frequenza di risonanza in cui la pendenza di |ZQ(f)| risulta molto maggiore di L, si ottiene un
significativo aumento del “guadagno” del derivatore (vedi figura) senza utilizzare induttanze di
valore improponibile a causa degli ingombri e delle inevitabili perdite dovute alla componente
resistiva degli avvolgimenti utilizzati.
Eventualmente al posto del carico risonante si potrebbe anche usare un quarzo (filtro monolitico)
che presenta un Q elevato e, di conseguenza, fianchi estremamente ripidi della funzione |ZQ(f)| .
Vu
L
RS
vF
C
R
CA
RFC
E0
FM Stereo
Come è noto la maggior parte delle stazioni che utilizzano questo servizio trasmettono un segnale
audio stereofonico. Per garantire la compatibilità tra stazioni trasmittenti in monofonia e in
103
stereofonia e ricevitori predisposti, oppure non per la ricezione di segnali streofonici, si opera una
particolare codifica del segnale a partire da un segnale somma (canalle destro+ canale sinistro) e da
un segnale differenza (canale destro – canale sinistro). Il segnale differenza viene modulato in
ampiezza senza portante intorno ad una frequenza di 38 kHz e, quindi, sommato al segnale somma.
Il segnale così ottenuto (che occupa una banda di 53 kHz) viene quindi modulato in frequenza alla
portante di trasmissione in modo da ottenere una banda di Carson di 180 kHz e, quindi, da occupare
la stessa banda di un canale monofonico.
4.4.3 Ricevitori per telefonia cellulare
E’ opportuno fornire, in questa sede, alcune indicazioni sull’architettura dei ricevitori destinati a
questo tipo di servizio. Si tratta, in genere, di ricevitori integrati su singolo chip (almeno per quanto
riguarda la parte di front end), destinati a lavorare a frequenze che vanno da 900 MHz ad lcuni GHz
a seconda dei casi. Ricevitore e trasmettitore vengono integrati sullo stesso chip e prendono il
nome di Transceiver. Facciamo riferimento allo standard più diffuso al momento della stesura di
questi appunti: lo standard GSM.
Esso adotta un metodo di accesso al canale di tipo FDM (Frequency Division Multiplexing) con una
ripartizione fra 8 utenti in suddivisione temporale (TDMA) all’interno di ogni canale. Ovvero
ciascun canale, della larghezza di 200 kHz, è utilizzato da 8 utenti che lo occupano a turno
utilizzando a rotazione slot temporali di 9 ms ciascuna.
Questa complessità è necessaria per avere una buona efficienza spettrale visti l’affollamento della
banda. Questa gestione apparentemente complessa della risorsa “canale” è realizzabile a basso costo
solo grazie ad un livello di integrazione molto spinto.
Tipicamente un ricevitore può essere realizzato con due soli chip quello del Transceiver e quello per
l’elaborazione in banda base.
In teoria, poiché si può usare la stessa tecnologia per i due chip, sarebbe possibile una soluzione
single chip che, però, non viene di solito utilizzata a causa delle forti interferenze che la parte di
elaborazione digitale causerebbe sul ricevitore. Mediante un dispositivo denominato duplexer, che
104
in questo caso è, sostanzialmente, un commutatore, si può utilizzare la stessa antenna per
trasmettere e ricevere. Infatti, sebbene la sensazione che ha l’utente è quella di una comunicazione
full duplex, in realtà gli slot temporali dedicati alla trasmissione sono separati da quelli dedicati alla
ricezione sullo stesso terminale mobile..
Per la banda GSM con frequenza centrale attorno ai 900 MHz esaminiamo una soluzione con
architettura supereterodina come quella in figura:
Il passa banda dopo il duplexer ha la funzione di eliminare i blockers e di introdurre una prima
attenuazione nei confronti della frequenza immagine. I due filtri dopo il LNA ed il mixer hanno la
funzione di attenuare la frequenza immagine e di selezionare il singolo canale che si vuole ricevere,
rispettivamente. Si dovrà realizzare un filtraggio molto selettivo intorno a 900 MHz ed uno intorno
alla fFI (in genere tra 40 e 70 MHz). A questo valore della fFI si perviene immaginando di utilizzare
un filtro di canale di tipo monolitico e con un fattore di qualità di qualche centinaio. Si ricorre a
filtri monolitici che non sono compatibili con la tecnologia integrata e, pertanto il segnale deve
essere portato fuori dal chip, filtrato e reintrodotto all’interno per le successive elaborazioni. Tutto
ciò comporta costi di realizzazione e montaggio aggiuntivi, oltre a richiedere un budget di potenza
105
non trascurabile a causa dell’elevato valore di corrente necessario per pilotare a queste frequenze le
capacità inevitabilmente connesse alla presenza dei pad di ingresso/uscita dal chip.
Per
ovviare
ad
alcuni
degli
inconvenienti
dell’architettura
supereterodina,
derivanti,
prevalentemente, dalla necessità di un elevato grado di integrazione, sono state proposte soluzioni
alternative..
Architettura omodina.
In questo caso la frequenza intermedia è nulla in quanto l’oscillatore locale lavora alla stessa
frequenza della portante. Il segnale viene quindi traslato in continua perciò il filtro di canale è un
passa-basso.
Il problema della frequenza immagine non sussiste. Il filtro passa basso che agisce come filtro di
canale, anche se molto selettivo, è comunque integrabile perché lavora a 200kHz e può essere
realizzato con tecnologie compatibili con l’integrazione (ad esempio mediante la tecnica dei
condensatori commutati).
Un problema potrebbe essere quello dell’accoppiamento dell’oscillatore locale con l’ingresso del
ricevitore che è sintonizzato sulla stessa frequenza (omodina vuol dire proprio questo). Essendo il
primo un segnale di notevole potenza e l’accoppiamento controllato da fenomeni aleatori (tipo la
posizione del ricevitore, l’orientamento dell’antenna, ecc,) questo fenomeno può produrre in uscita
al mixer una tensione “quasi continua” (DC offset) nociva alla corretta demodulazione.
Un altro problema abbastanza serio è costituito dal rumore flicker il cui spettro si concentra intorno
alla continua (vedi figura):
106
Per limitare questo problema si dovrebbe lavorare con un AFI in grado di filtrare l’intervallo che va
dalla continua fino alla frequenza di corner del rumore flicker, ovvero, utilizzare un valore della fFI
di alcune centinaia di kHz: tipicamente f FI = 200kHz ÷ 1MHz . Questa scelta porta ad una
architettura diversa denominata “Low IF”.
Architettura LOW-IF:
Questa architettura è caratterizzata da un valore della frequenza intermedia talmente basso da
rendere praticamente impossibile la realizzazione del filtro a radiofrequenza che risulta troppo
“prossima” alla frequenza immagine. Oltre ad essere estremamente selettivo il filtro dovrebbe a
frequenza centrale variabile.perchè il range RF si sovrappone al range IM.
Il problema si risolve eliminando il filtro per la frequenza immagine (rimane la necessità di un filtro
RF esterno per eliminare i blockers prima del LNA) ed utilizzando un particolare tipo di mixer
denominato “ Mixer a Reiezione della Frequenza Immagine” che è in grado di trattare in maniera
differenziata il canale centrato sulla fRF , che si trova a sinistra della frequenza dell’oscillatore
locale, da quello centrato sulla fIM che si trova in posizione simmetrica a destra. In figura è
schematizzato l’intero transceiver integrato che non richiede alcuna uscita intermedia dal chip e
permette di conseguire enormi vantaggi in termini di costo, ingombro, consumo ed affidabilità.
DUP
LNA
fIF
fIM
reietta
l’up-link
PA
fRF
AFI
LOW IF
100kHz÷1MHz
B.B.
20dBm
TX
107
CAPITOLO 5
Anelli ad aggancio di fase (Phase Locked Loop)
Il PLL (Phase Locked Loop – anello ad aggancio di fase) è un sistema reazionato la cui uscita è un
segnale con frequenza pari a quella del segnale di ingresso ed una relazione di fase fissa rispetto a
questo. La forma d’onda del segnale di uscita (ovvero il suo contenuto armonico) può essere diversa
da quella del segnale di ingresso. Ad esempio: segnale di ingresso a onda quadra, segnale di uscita
sinusoidale agganciato alla prima armonica di quello di ingresso.
Il PLL è molto usato nei sistemi di telecomunicazioni, ad esempio come sintetizzatore di frequenza
o per estrarre componenti spettrali da segnali periodici complessi.
In questo capitolo dapprima sarà illustrato il funzionamento di un semplice PLL, e successivamente
saranno illustrate alcune applicazioni.
5.1 Generalità
In figura è mostrato lo schema a blocchi semplificato di un PLL. L’anello ad aggancio di fase è
costituito da un Phase Detector (PD), che da in uscita un segnale di livello proporzionale allo
sfasamento fra il segnale in ingresso e quello in uscita al PLL; un filtro passa basso (F(s)),
solitamente realizzato con una rete RC a polo dominante a bassissima frequenza; un oscillatore
controllato in tensione (VCO – Voltage Controlled Oscillator), il cui segnale di uscita ha una
frequenza che si scosta da quella di “riposo” del VCO di un valore proporzionale al livello del
segnale al suo ingresso VC(t). La frequenza di riposo del VCO (detta anche frequenza libera di
oscillazione) è definita come la frequenza di oscillazione per VC(t) = 0.
Fig. 5.1 Schema a blocchi di un PLL
108
Il segnale in uscita al VCO è dato da:
vO (t ) = VOM cos ω0t + θ O ( t )
dove VOM è l’ampiezza dell’oscillazione dell’uscita del VCO, ω0 è la pulsazione di riposo e θO ( t )
è un termine di fase aggiuntivo dipendente da vC (t ) attraverso una semplice relazione che
definiremo nel seguito. Se vC (t ) = 0 il segnale di uscita del VCO ha pulsazione pari a ω0 , se
vC (t ) ≠ 0 allora la pulsazione di uscita si discosta da ω0 di un valore proporzionale a vC (t ) . La
pulsazione istantanea del segnale in uscita dal VCO, per definizione, è pari a:
ωi = ω0 +
dθ O
dt
dove:
dθ O
= K D vC (t )
dt
Questa relazione, con K D costante caratteristica del VCO, stabilisce la dipendenza tra Vc(t) e θ0(t).
Integrando i membri a sinistra e a destra si ottiene:
t
θO (t ) = K D ∫ vC (τ )dτ
0
Infine, passando alla trasformata di Laplace, si ha che:
ΘO ( s ) =
KD
VC ( s )
s
Gli ingressi del Phase Detector sono i segnali in ingresso ed in uscita al PLL, vS (t ) e vO (t ) .
109
vS (t ) = VSM cos [ω0t + θ S (t ) ]
vO (t ) = VOM cos [ω0t + θO (t ) ]
Il segnale in uscita al Phase Detector è un segnale di ampiezza proporzionale alla differenza fra gli
argomenti dei segnali in ingresso. Nel dominio dei segnali trasformati:
VE ( s) = K E [ Θ S ( s) − ΘO ( s )] = K E Θ E ( s)
dove Θ S ( s ) e ΘO ( s ) sono rispettivamente le trasformate di Laplace delle fasi dei segnali in
ingresso al Phase Detector, Θ E ( s ) è la trasformata di Laplace della differenza fra le fasi e K E è la
costante caratteristica del PD.
Sia F ( s ) la risposta in frequenza del filtro passa-basso; il segnale in uscita al filtro è pari a:
VC ( s) = VE ( s ) F ( s) = K E ( s) [ Θ S ( s) − ΘO ( s) ] F ( s)
L’uscita del filtro F ( s ) è l’ingresso del VCO; dunque l’uscita del VCO è data da:
ΘO ( s ) =
KD
K
VC ( s ) = D K E [ Θ S ( s ) − ΘO ( s )]
s
s
Con semplici passaggi si arriva all’espressione della funzione di trasferimento del PLL, H ( s ) , che
lega la fase del segnale in uscita al VCO con la fase del segnale in ingresso al PLL.
Θ O ( s ) [ s + K D K E F ( s ) ] = K D K E F ( s )Θ S ( s )
H ( s) =
ΘO ( s )
K D K E F (s)
=
ΘS ( s) s + K D K E F ( s)
5.2 Risposta al gradino di fase e di frequenza
Si supponga che ad un certo istante la fase del segnale in ingresso abbia una variazione a gradino
pari a ∆θ . La trasformata di Laplace del segnale di ingresso è, quindi,
110
∆θ
. La risposta al gradino
s
di fase del PLL sarà pari a
∆θ
H ( s ) . Il teorema del valore finale consente di valutare il valore che
s
assumerà la fase del segnale in uscita al PLL a regime, ovvero quando il transitorio si sarà esaurito.
lim θ O (t ) = lim s
t →∞
s →0
∆θ
∆θ K D K E F ( s )
= ∆θ
H ( s ) = lim s
s
→
0
s
s s + K D K E F ( s)
Dunque dopo un transitorio, la fase del segnale in uscita al PLL tende ad agganciarsi alla nuova
fase del segnale in ingresso (figura 5.2).
Figura 5.2: Fase del segnale in uscita al PLL θO (t ) in risposta ad un
gradino della fase del segnale in ingresso θ S (t ) .
L’andamento esatto del transitorio dipende, ovviamente, dall’andamento della funzione F(s), ma il
valore finale è, comunque, ∆θ.
Gradino di frequenza
La funzione di trasferimento del PLL che lega le frequenze dei segnali in uscita ed in ingresso al
PLL è la medesima di quella che lega le fasi:
ΩO ( s ) sΘO ( s )
K D K E F (s)
=
=
= H ( s)
Ω S ( s ) sΘ S ( s ) s + K D K E F ( s )
111
dove ΩO ( s ) e Ω S ( s ) sono le trasformate di Laplace delle pulsazioni del segnale di uscita e di
quella del segnale di ingresso al PLL rispettivamente.
Si supponga che la pulsazione istantanea del segnale in ingresso al PLL (che inizialmente si
supponga essere pari a ω0 ) subisca una variazione brusca pari a ∆ω :
vS (t ) = VSM cos (ω0 + ∆ω ) t
La trasformata di Laplace del gradino di frequenza è pari a
∆ω
. Come già visto nel caso del
s
gradino di fase, applicando il teorema del valore finale, si vede come la frequenza del segnale di
uscita a regime tende ad agganciarsi a quella dell’ingresso (figura 4.3).
lim ωO (t ) = lim s
t →∞
s →0
∆ω
∆ω K D K E F ( s )
H ( s ) = lim s
= ∆ω
s →0
s
s s + K D K E F ( s)
Fig. 5.3: Risposta del PLL al gradino di frequenza
A regime (per t → ∞ ) dunque, la pulsazione del segnale di uscita avrà un valore ωi ≠ ω0 ; ciò vuol
dire che il segnale in ingresso al VCO sarà vC (t ) ≠ 0 , e più precisamente VC ( s ) K D = ∆ω .
Il segnale in ingresso al VCO a regime sarà pari a:
112
VC (t ) = K E [ Θ S (0) − ΘO (0)] F (0)
Sostituendo a VC ( s ) il termine
∆ω
, si ha:
KD
∆ω = K D K E [ Θ S (0) − ΘO (0)] F (0)
Θ S (0) − ΘO (0) =
∆ω
K D K E F (0)
Affinché il PLL assuma la stessa fase a regimedel segnale in ingresso, deve essere
Θ S (0) − ΘO (0) = 0 . Da quest’ultima espressione si può vedere che l’unico modo affinché il PLL
possa agganciare la fase del segnale in ingresso di riferimento anche ad una pulsazione ωi ≠ ω0 è
che risulti F (0) → ∞ . Un quadripolo che ha un guadagno che tende all’infinito per s → 0 è
l’integratore, che ha una risposta del tipo:
F (s) =
A0
s
Esso può essere approssimato, ad esempio con un amplificatore operazionale, come mostrato in
figura 5.4. L’integratore di figura 5.4, nel range di frequenza in cui è utilizzabile il metodo del
cortoi circuito virtuale, presenta una funzione di trasferimento pari a:
AI ( s ) = −
1
R1Cs
Figura 5.4: Schema di un integratore realizzato con un amplificatore
operazionale.
113
5.3 Sintetizzatori di frequenza
Una delle applicazioni più diffuse del PLL è il sintetizzatore di frequenza. Si realizzano in questo
modo sistemi in grado di sintetizzare un insieme discreto di valori di frequenza che possono trovare
impiego nei casi più disparati, dalle applicazioni audio (ad esempio strumenti musicali elettronici)
fino a quelle radio del range dei GHz o delle decine di GHz. I sintetizzatori di frequenza sono di due
tipi: quelli ad N intero e quelli ad N frazionale. Nel seguito verrà esaminato solo il primo tipo.
In figura 5.5 è mostrato lo schema a blocchi di un sintetizzatore a N intero.
Figura 5.5: Schema a blocchi di un sintetizzatore di frequenza
Si ha che:
ωQ
M
=
ω0
N
⇒
ω0 = N
ωQ
M
(4.1)
Esso consente, al variare di N, di ottenere, a partire da una oscillazione generata mediante un
oscillatore stabile (in genere un oscillatore al quarzo), un set di frequenze caratterizzate dalla stessa
stabilità relativa dell’oscillatore di riferimento e distanti l’una dall’altra di una quantità pari a
ωQ
M
che rappresenta, quindi, la risoluzione in frequenza del sintetizzatore.
Si osservi che il P.D. lavora ad una frequenza pari alla risoluzione ed a fronte di una variazione
dell’ingresso è necessario un tempo almeno dello stesso ordine di grandezza del periodo
2πM
ωQ
perché l’uscita vada a regime.
114
5.4 Modulatore di frequenza indiretto
In questo caso l’oscillazione di riferimento viene fornita da un oscillatore stabile (ad esempio un
oscillatore al quarzo) ed il segnale modulante x(t) viene prima integrato, quindi inserito nell’anello
di controllo attraverso un sommatore.
∫
Con riferimento alla figura, i segnali nei diversi punti del sistema e le rispettive trasformate sono
date dalle seguenti relazioni:
Passando alle trasformate:
x(s)
Da cui passando alla forma in jω
ω si ricava:
Se sono rispettate le seguenti ipotesi:
115
1) F(jω) di tipo passa basso con valore alle basse frequenza pari a F0 e limite superiore di banda
ωFMAX;
2) Segnale modulante x(t) con spettro nullo a sinistra di ωFMAX
(Pertanto funzione di trasferimento del PLL approssimabile alla forma passa basso a singolo
polo ωP per tutto il range di frequenza interessato dal segnale modulante);
dove ωXMAX è “la massima frequenza contenuta nel segnale
3)
modulante” ovvero lo spettro di x(t) si annulla a destra di ωXMAX;
allora risulta:
Ovvero:
E, pertanto, si può concludere che lo scostamento istantaneo di frequenza dell’uscita del PLL risulta
proporzionale al segnale modulante, ovvero l’uscita v5 del PLL è un segnale modulato linearmente
in frequenza da x(t).
5.5 Demodulatore di frequenza
Se il segnale vs(t) in figura è modulato in frequenza dal segnale x(t), vogliamo dimostrare che vc(t) è
proporzionale al segnale modulante x(t).
Passando alle trasformate:
116
Poiché
Si ottiene:
Passando alla forma in jω e sotto le stesse ipotesi assunte nel paragrafo precedente si ottiene:
E, pertanto, vc(t) risulta proporzionale al segnale modulante, ovvero l’operazione di demodulazione
è stata correttamente effettuata.
117
CAPITOLO 6
Amplificatori di potenza e trasmettitori
Lo stadio trasmettitore di un sistema di ricetrasmissione deve essere in grado di effettuare almeno le
seguenti operazioni sul segnale in banda base:
5) utilizzarlo per modulare in modulo e/o in fase la portante;
6) filtrare eventuali componenti spurie frutto della modulazione;
7) amplificare il segnale modulato per portarlo al livello di potenza richiesto dalle specifiche
della particolare applicazione;
8) trasmetterlo utilizzando un’antenna con un diagramma di radiazione appropriato.
Non sempre le operazioni indicate ai punti 1-3, che sono logicamente separate, vengono effettuate
da blocchi circuitalmente separati e posti in cascata, talvolta l’operazione di modulazione e quella di
amplificazione di potenza vengono effettuate contemporaneamente all’interno di un unico stadio: in
questo caso si parla di modulazione ad alto livello. Quando, invece, si può individuare uno stadio di
modulazione separato da quello di amplificazione, allora si parla di modulazione a basso livello. Lo
schema a blocchi di massima di un trasmettitore che utilizza un modulatore a basso livello è
rappresentato in figura. Nella fattispecie, si tratta di un trasmettitore a conversione diretta, in quanto
la modulazione avviene alla stessa frequenza della portante di trasmissione. Nel caso in cui vi sia,
prima dell’antenna, un mixer utilizzato per una traslazione in alto della frequenza, allora si parla di
trasmettitori a doppia conversione o, più in generale, a conversione multipla.
e(t)
Modulatore
Power
Amplifier
Oscillatore
Locale
.
118
Mentre l’architettura dello stadio di modulazione dipende, ovviamente, dal tipo di modulazione
utilizzata, l’amplificatore di potenza presenta alcune caratteristiche comuni a tutti gli stadi di
potenza e, quindi, indipendenti dal tipo di modulazione. Come si vedrà nel seguito, comunque, il
fatto che la modulazione agisca sull’ampiezza del segnale o sul suo argomento (modulazioni ad
inviluppo costante) pone delle condizioni imprescindibili sulla scelta dell’amplificatore di potenza.
6.1 Amplificatori di potenza
In un sistema di ricetrasmissione il power amplifier (PA) è presente esclusivamente in trasmissione.
Le potenze che esso sarà chiamato a gestire, nel caso in cui si tratti di un amplificatore allo stato
solido, vanno da qualche mW (10dBm) fino a centinaia di watt (20dB=50dBm). Per potenze
superiori si utilizzano componentistica e soluzioni circuitali diverse il cui studio non è contemplato
tra gli obiettivi del presente corso.
I problemi nuovi che sorgono in amplificatori destinati a trattare potenze da alcune decine di mW
in su sono abbastanza diversI da quelli che caratterizzano gli amplificatori per piccoli segnali. Ne
daremo nel seguito una rapida rassegna facendo riferimento all’utilizzo di transistori bipolari,
sebbene questi ultimi possano essere, e sempre più frequentemente ciò accade, sostituiti da
transistori MOS oppure da MESFET.
6.1.1 Definizioni
Iniziamo la trattazione introducendo e, in qualche caso, definendo alcune caratteristiche tipiche
degli amplificatori di potenza.
1. Linearità
Una potenza di 1 W su un carico di 50 Ω equivale a una tensione/corrente pari a
PL = 1W =
1W =
2
V UM
2 ⋅ 50
2
I Um
2
⇒ V UM ≅ 10V
⋅ 50 ⇒ I UM ≅ 200mA
Il comportamento non lineare dei componenti attivi, in queste condizioni, non può essere
trascurato
2. Efficienza di conversione:
l’efficienza di conversione η =
PU
PE
è il rapporto tra la potenza utile in uscita PU e la potenza
erogata dalle batterie PE. Essa fornisce una misura del rendimento col quale la potenza erogata
119
dalle batterie viene convertita in potenza utile del segnale trasmesso. Ovviamente risulta
sempre:
η ≤1
E’ opportuno osservare che un elevato valore dell’efficienza di conversione oltre che risultare
vantaggioso dal punto di vista del consumo di potenza e dell’autonomia delle batterie, ha come
conseguenza la riduzione della dissipazione sul componente attivo con evidenti vantaggi sul suo
costo e su quello di eventuali sistemi necessari ad asportare il calore generato al suo interno
onde evitarne il danneggiamento irreversibile.
3. Fattore di utilizzo:
il fattore di utilizzo θ u =
PU
V CE max I C max
è il rapporto tra la potenza utile ed il prodotto tra i
valori massimi istantanei della tensione VCE e della corrente di collettore. Sebbene tale prodotto
abbia le dimensioni di una potenza, non rappresenta alcun potenza effettivamente osservabile
nell’amplificatore. Infatti, essendo VCEmax e ICmax, rispettivamente, il massimo valore della
tensione collettore emettitore e della corrente di collettore non esiste alcun istante del ciclo di
funzionamento in cui queste due grandezze risultano contemporaneamente assumere il loro
valore massimo.
θu ha, piuttosto, il significato di fattore di merito: più esso è grande più significa che, a parità
di potenza sul carico, il prodotto VCEmaxICmax risulta piccolo. In altri termini, a parità di potenza
utile in uscita, il transistore sarà chiamato a sopportare tensioni/correnti massime più piccole.
Di fatto questo significa che il transistore, a parità di potenza utile, avrà un costo inferiore
poiché ad esso saranno richieste prestazioni più limitate. I transistori per applicazioni di
potenza possono sopportare dissipazioni di centinaia di watt.
4. Classi di funzionamento
Come si vedrà nel seguito, per motivi di efficienza, si ricorre, talvolta, a soluzioni circuitali
nelle quali il transistore si trova in zona attiva solo per una frazione del periodo. Si definisce,
allora, l’angolo di circolazione θ come la metà della frazione di periodo, misurata il radianti,
durante il quale il transistore è in zona attiva. A seconda del valore di θ si parlerà di
amplificatore in classe A (θ=π), in classe B (θ=π/2), in classe C (θ<π/2), oppure in classe
ΑΒ (π/2<θ<π).
120
-
classe A: θ = π
-
classe B: θ = π/2
-
classe AB: π/2 < θ < π
-
classe C: 0 < θ < π/2
Nel seguito esamineremo alcune configurazioni circuitale e modalità di funzionamento tra le più
diffuse e, per ciascuna, calcoleremo i parametri prima definiti. Si continuerà a fare riferimento al
caso di amplificatori a transistori bipolari, ma, quanto segue, con ovvie trasformazioni, può
applicarsi al caso di componenti attivi diversi.
6.1.2 Amplificatore in classe A
Si tratta di una configurazione ben nota e sempre utilizzata dagli amplificatori per piccolo segnale.
Nella figura seguente è rappresentato il circuito corrispondente con una rete di polarizzazione
semplificata dalla eliminazione della resistenza di emettitore RE che è stata omessa, sia per
semplicità di calcolo, sia perché lìobiettivo che ci prefiggiamo è quello di verificare quale sia la
massima efficienza di conversione conseguibile con questa soluzione: la RE, dissipando potenza in
continua non utile alla trasmissione, non può far altro che ridurre l’efficienza.
Possiamo immaginare valori tipici della corrente di collettore nel range delle centinaia di
milliampere o maggiori. Nei transistori di potenza il guadagno di corrente hFE è piccolo rispetto a
quello degli amplificatori per piccolo segnale.
121
Infatti, per sopportare elevati valori di corrente dovranno avere aree attive molto grandi e, su
superfici così ampie, è più difficile garantire spessori di base molto piccoli, requisito necessario ad
un alto valore di hFE che, in genere, è nell’intervallo 10 ÷ 100. A questi valori di corrente di
collettore il ruolo stabilizzante della RE è svolto già parzialmente dalla resistenza parassita di
dispersione.
Dall’analisi della maglia di ingresso e con l’utilizzo della caratteristica di ingresso del componente
attivo si ricava il valore della corrente di base a riposo IBQ.
La retta di carico statico è verticale e, in continua, VCEQ = VCC , pertanto, il valore di IBQ fissa il
punto di riposo P(VCEQ,ICQ).
Il punto istantaneo di funzionamento P[VCE(t),IC(t)] si muove su una retta con pendenza
−
1
RL
= tg (ϕ )
vce = - RL ic
V CE (t ) = V CE Q + v ce (t )
ic
+
Vce
-
RL
I C (t ) = I C Q + i C (t )
122
∆V CE = − ∆I C R L
A partire dal punto di riposo una variazione di vce(t) determina una variazione di ic(t) che fa
muovere il punto istantaneo di lavoro sulla retta di carico dinamica rappresentata in figura. Se la
sollecitazione è simmetrica lo spostamento lungo la retta sarà simmetrico. Finchè il transistore è in
zona attiva si considereranno costanti i suoi parametri differenziali e pari ai loro valori medi.
L’escursione massima della VCE(t) e della IC(t) dipendono dall’inclinazione della retta di carico
dinamico e, quindi , dal valore della RL. Si può facilmente dimostrare che, nell’ipotesi di poter
considerare trascurabile la tensione di saturazione VCESAT, il valore di RL per cui si può consegnare
al carico la massima potenza è RL= VCEQ/ICQ.
.
Le diverse condizioni sono rappresentate nella figura seguente nella quale la retta di carico
dinamica di massima potenza è rappresentata con tratto più solido e corrisponde al suddetto valore
di RL Sotto queste condizioni calcoliamo l’efficienza di conversione: η =
PU
precisando ch PU è la
PE
potenza utile sul carico, ovvero quella relativa alla frequenza di trasmissione di prima armonica. Ai
fini del calcolo, quindi, non
si considerano
né eventuali componenti in continua né quelle
derivante da componenti armoniche di ordine superiore rispetto alla fondamentale. Sotto queste
condizioni risulta:
123
PU =
2
VCC
2 RL
Se trascuriamo la potenza dissipata in base e sulle resistenze di polarizzazione di base (comunque
piccola rispetto alle altre potenze in gioco), PE dipende solo dalla corrente ICQ e dalla tensione di
alimentazione. Infatti, una eventuale componente variabile (comunque non presente a causa del
blocco introdotto dall’induttanza RFC) essendo a valor medio nullo non produrrebbe alcun
contributo alla potenza media erogata dalla batteria.
Pertanto:
PE = VCC I CQ
Quindi:
Ovvero
η=
2
VCC
1
1
=
2 R L VCC I CQ 2
la massima efficienza di conversione è del 50%. E’ opportuno osservare che quello
calcolato è il valore massimo che si ottiene solo in presenza di un segnale abbastanza ampio da
causare la massima escursione della VCE e della IC. Se l’ampiezza del segnale è minore, poiché la
potenza erogata dalla batteria è indipendente dal segnale, si ottiene un valore minore di h. Di fatto
l’efficienza dipende dall’ampiezza del segnale.
Calcoliamo, adesso, il fattore di utilizzo a partire dalla sua definizione:
124
θu =
PU
VCE max I C max
Per l’amplificatore in classe A risulta:
θu =
2
VCC
V
R
1
1
= CC L = = 0.125
2 R L 2VCC 2 I CQ 8 R L VCC 8
6.1.3 Amplificatore in classe B
Per migliorare l’efficienza di conversione bisogna esplorare modalità di funzionamento diverse da
quelle tipiche della classe A caratterizzata da una erogazione di potenza da parte delle batterie
indipendente dalla presenza o meno del segnale. Esaminiamo nel seguito un esempio di
amplificatore in cui i singoli componenti attivi operano in classe B (θ = π/2). Si tratta di una
configurazione tra le più diffuse negli stadi di potenza che va sotto il nome di Amplificatore pushpull.
VCC
RS
vs
+
_
1
vu
2
RL
Ipotesi di lavoro:
- Vγ = 0
- Transistori PNP ed NPN con
caratteristiche simmetriche
-VCC
Risulta evidente che i due transistori non potranno essere contemporaneamente in zona attiva
poiché sono caratterizzati dallo stesso valore della tensione base-emettitore e, di conseguenza,
quando questa è positiva risulterà 1 in zona. attiva e 2 in interdizione, quando è negativa il
viceversa.
Analizziamo la situazione a riposo, ovvero per vs = 0I transistori risultano ambedue interdetti, infatti, se, per assurdo, ipotizziamo che 1 sia in zona attiva
( e 2 interdetto) avremo corrente in RL e, di conseguenza VE1 > 0 → VB1 = VE1 + Vg > 0 .
125
La corrente di base risulterà IB1 = -VB1/RS < 0 ovvero corrente di base negativa in un transistore
NPN in zona attiva: conclusione ovviamente non accettabile. Lo stesso ragionamento potrebbe farsi
a partire dall’ipotesi di 1 interdetto e 2 in zona attiva, pertanto l’unica soluzione possibile è che
ambedue i transistori risultino interdetti.
In definitiva, a riposo:
A riposo per il transistore 1:
vu = 0 → VCE1 = VCC
IC = 0
→ punto di riposo
VCE1 = VCC
I CQ1 = 0
Lo stesso vale per il transistore 2:
VCE 2 = −VCC
I CQ 2 = 0
Esaminiamo adesso cosa accade se vs è sinusoidale. Nella figura seguente sono indicate la tensione
Vs e le correnti di collettore (quella del transistore 2 è rappresentata con segno opposto a quello
convenzionale e risulta, pertanto positiva).
Nel semiperiodo positivo conduce 1 e 2 è interdetto. Il transistore 1 funziona in configurazione
inseguitore di emettitore e, se RL(hfe+1)>>hie+RS , risulta
VU ≈VS
La corrente sul carico è IL = IC1
126
Nel semiperiodo negativo conduce 2 e 1 è interdetto Il transistore 2 funziona in configurazione
inseguitore di emettitore e, se RL(hfe+1)>>hie+RS , risulta ancora:
VU ≈VS
La corrente sul carico è IL = -IC2
Ciascun transistore funziona in classe B.
Il punto istantaneo di lavoro del transistore 1 percorre la traiettoria tracciata a tratto continuo nella
figura seguente:
IC1
Max ampiezza
consentita al segnale
IC1max
Il segnale può non
avere la massima
ampiezza consentita
Retta con pendenza: -1/RL
VCC
I° semiperiodo
VCE1
II° semiperiodo
Nota: In figura la corrente IC2 è
rappresentata col verso convenzionale e,
pertanto, risulta di segno opposto a quello
della figura precedente.
Calcoliamo adesso l’efficienza di conversione η =
PU
. Anche in questo caso la calcoliamo in
PE
corrispondenza della massima escursione consentita al punto istantaneo di funzionamento senza
entrare in zona di saturazione. Il calcolo viene fatto ancora una volta supponendo trascurabile la
tensione di saturazione VCESAT.
PU =
2
I CM
RL
2
I CM max =
VCC
RL
127
Per quanto riguarda la potenza erogata, bisogna tenere conto del fatto che ci sono due batterie.
Pertanto:
PE = VCC
Dove
I CM
π
I CM
π
⋅2
è il valor medio della sinusoide raddrizzata a singola semionda.
Quindi: η =
2
I CM
I Rπ
V πRL
π
π
RL
= CM L ⇒ η max = CC
= ≅ 0.78 ⇒ 78%
RL 4VCC 4
2
2 ⋅ VCC I CM
4VCC
In conclusione: in classe B l’efficienza di conversione massima migliora del 28% rispetto a quella
ottenibile in classe A , mentre la potenza dissipata sui due transistori, a parità di potenza utile,
risulta più che dimezzata (meno di ¼ su ciascun transistore rispetto alla classe A).
Passiamo al calcolo del fattore di utilizzo: θ u =
PU
VCE max I C max
VCE max = VCC
I CE max =
Quindi: θ u =
VCC
RL
2
VCC
RL
1
= = 0.25
2 RL 2VCCVCC 4
Il fattore di utilizzo aumenta, ma, dal punto di vista del fattore di costo non è direttamente
confrontabile con quello della classe A poiché bisogna tenere conto del fatto che, nel push-pull,
sono necessari 2 transistori invece che 1.
6.1.4 Amplificatore in classe C
Passiamo adesso ad esaminare il caso del funzionamento in classe C. In realtà l’analisi che seguirà
sarebbe applicabile a qualunque classe di funzionamento e i casi prima esaminati (Classe A e B)
potrebbero essere visti come casi particolari. Ciononostante la topologia circuitale utilizzata per
tale analisi trova, di fatto, applicazione, quanto meno a fini dell’efficienza di conversione, quasi
esclusivamente nel caso di funzionamento in classe C e, pertanto. lo schema circuitale
corrispondente va spesso sotto la denominazione di amplificatore in classe C. In realtà, partendo
dallo schema generale mostrato in figura, variando il valore della batteria di polarizzazione EB si
può lavorare in ciascuna della quattro classi di funzionamento possibili.
Per ottenere il funzionamento in classe C dobbiamo fare in modo che risulti θ < π/2.
128
Nell’ipotesi di CA di valore sufficientemente elevato e caduta trascurabile su RS, si ottiene:
VB = Vs + E B
VS = VSM cos(ωt )
vBE
VT
EB
ωt
ICM
IC
ωt
θ
Se immaginiamo la caratteristica di ingresso del transistore caratterizzata da un valore della
tensione di soglia VT al di sotto del quale le correnti di base e di collettore risultano nulle (il
discorso può essere esteso a transistori MOS), si può osservare quanto segue:
129
EB < VT
π
EB > VT I C ≠ 0 per θ >
2
Se:
EB − VSM < VT
EB = VT
EB − VSM > VT
⇒ classe C
⇒ classe AB
⇒ classe B
⇒ classe A
Prendiamo come riferimento il funzionamento in classe C.
E B < VT (ovviamente supporremo EB+VSM>VT altrimenti il transistore risulterà sempre interdetto).
A riposo il transistore è interdetto (VS = 0)
VB = VSM cos(ω 0 t ) + E B
⇒ VB = E B < VT
V
=
0
SM
I C = 0
:
VCE = VCC
Applichiamo un segnale di ampiezza tale che risulti VSM +EB > VT
IC ≠ 0 per un intervallo pari ad una frazione del periodo. Il suo valor medio sarò diverso da zero e
lo indicheremo con IC0.
Dal bilancio delle correnti al nodo di collettore, con ovvio simbolismo, risulta:
I RFC − I C − I CA = 0
I CA = I RFC − I C
L’induttanza RFC è un blocco per le radiofrequenze e le rispettive armoniche, quindi è attraversata
solo dalla componente continua IC0, infatti la corrente ICA che attraversa il condensatore avrà
componente continua nulla.
IC è periodica e, quindi, sviluppabile in serie di Fourier con un termine continuo IC0 più tutte le
armoniche.
Risulta:
I RFC = I C 0 = I C il valor medio della IC coincide con la corrente erogata dalla batteria
130
Detta iC(t) la componente a valor medio nullo della corrente di collettore, risulta :
IC = IC0 +iC
IRFC=IC0
ICA=IRFC-IC= iC(t)
Ovvero la corrente nel condensatore CA è l’opposto della componente variabile della corrente di
collettore.
Il gruppo RLC viebe dimensionato in modo da risuonare alla frequenza della fondamentale e,
pertanto, alla frequenza di risonanza, LC è un circuito aperto.
ω0 L =
1
→ ω0 =
ω0C
1
LC
La 1a armonica della ICA passa tutta nel carico RL. Le armoniche successive si ripartiscono nei tre
rami R, L e C in proporzione inversa al modulo dell’impedenza di ciascun ramo. Ad esempio, per
quanto riguarda la 3a armonica si ha:
3ω0 L = 9
1
3ω0C
Pertanto la corrente in C predomina su quella in L (è 9 volte maggiore). Per le armoniche superiori
la differenza è ulteriormente accentuata a favore della componente che scorre i C rispetto a quella
che scorre in L. Se si tiene conto del valore del fattore di qualità Q definito come:
Q = ω 0 RL C =
RL
1
ω0C
Al crescere di Q ( per esempio per Q = 10) risulta RL >>
1
e, pertanto, per tutte le armoniche
ω0 C
superiori alla prima si può trascurare nel parallelo con C l’effetto di RL e concludere che
131
l’impedenza vista decresce con l’ordine dell’armonica N come la reattanza 1/(Nw0C). Poiché anche
l’ampiezza delle armoniche dello sviluppo in serie della corrente decrescono con N risulta evidente
che, se Q è abbastanza elevato, allora le componenti armoniche della tensione ai capi del gruppo
RLC risultano evanescenti rispetto alla fondamentale e, pertanto, la tensione sul carico è quasi
sinusoidale. In maniera sintetica si dice che il gruppo RLC esercita un effetto filtrante sulla ICA tale
da ottenere sul carico una tensione sinusoidale pur essendo il gruppo RLC alimentato con una
corrente pulsata. In altri termini le componenti armoniche superiori vengono mandate a massa
passando attraverso la reattanza capacitiva e producono una tensione ai capi di RLC trascurabile
rispetto alla fondamentale. La funzione del gruppo RLC è quella di filtrare la corrente pulsata per
ottenere una tensione sinusoidale di ampiezza: VUM = I C1M RL , dove IC1M è l’ampiezza della 1°
armonica dello sviluppo in serie di Fourier della IC. Anche in questo caso l’efficienza di
conversione dipende dall’ampiezza del segnale da cui dipendeil valore di IC1M. In particolare, si
osserva che il valore di IC1M è limitato dalla saturazione del componente attivo. Infatti
l’andamento della tensione di collettore è quello in figura: si evince che, per evitare la saturazione
(VC=0) deve essere:
I C1M RL < VCC
In corrispondenza del valore di IC1M massimo ricavabile dalla precedente disuguaglianza si ottiene
la massima efficienza di conversione. Se si riporta tale efficienza in funzione dell’angolo di
circolazione si ottiene l’andamento in figura:
132
Che sembrerebbe indurre alla scelta di valori dell’angolo di circolazione tendenti a 0 per
massimizzare l’efficienza. In realtà , però, bisogna tenere conto anche di un altro parametro: il
fattore di utilizzo θu il cui andamento in funzione di θ è riportato in figura.
Per θ→0 si ha θu→0
Si osservi che
θu =
PU
a parità di PU se θu→0 ⇒ VCE max I C max →∞
VCE max I C max
Ovvero il transistore è chiamato a sopportare tensioni e/o correnti che tendono all’infinito. Poiché
ciò non è ammissibile, è necessario utilizzare valori di θ significativamente maggiori di 0. Questo
stato di cose è chiaramente comprensibile se si osserva che il transistore trasmette potenza al carico
solo negli intervalli di tempo in cui è IC ≠ 0. Se lo deve fare in tempi che rappresentano frazioni
trascurabili del periodo, allora il picco di corrente dovrà avere valore massimo estremamente
elevato (al limite la corrente dovrebbe essere una delta di Dirac se l’angolo di circolazione tendesse
a zero): questo spiega come mai il fattore di utilizzo tenda a zero al diminuire di θ oltre un certo
limite.
Un buon compromesso si ha per θ ≈ 60° che fornisce un ηMAX ≈ 85%.
Gli amplificatori in classe C vengono utilizzati per potenze fino ad alcune centinaia di watt e
frequenze prossime al GHz.
Nel campo delle microonde (da qualche GHzin su) non si trovano amplificatori in classe C perché
gli effetti capacitivi intrinseci non permettono, di fatto, di interdire il transistore.
Contrariamente a quanto accade per gli amplificatori in classe A e B , quelli in classe C non
possono essere utilizzati per amplificare segnali modulati in ampiezza poiché il loro comportamento
nei riguardi dell’ampiezza del segnale di ingresso non è lineare.
133
6.1.5 Amplificatore in classe D
L’amplificatore in classe D fa parte di una classe di amplificatori detti “ad alta efficienza”, capaci,
almeno in linea teorica, di lavorare con efficienza di conversione unitaria. Per fare ciò si deve
ridurre al minimo la potenza dissipata sul componente attivo, facendo in modo, al limite, che
VCE(t) IC (t) = 0 per ogni t. Quindi quando il dispositivo attivo è in conduzione (IC ≠ 0) la tensione ai
suoi capi deve essere nulla, mentre quando la tensione è diversa da zero esso deve risultare
interdetto (corrente nulla). In altre parole il suo comportamento deve essere simile a quello di un
interruttore.
Lo schema di principio di un amplificatore in classe D è rappresentato in figura:
La tensione che aziona l’interruttore è un’onda quadra derivata da una sinusoide:
V0 cos(ω 0 t ) . Il
gruppo RLC serie risuona alla pulsazione ω0 e si suppone sia caratterizzato da un valore di Q
abbastanza elevato (Q>10).
Q=
T0 =
ω0 L
RL
2π
ω0
=
1
; ω0 =
ω 0 CR L
1
LC
è il periodo di commutazione del tasto tra le posizioni 1 e 2.
La tensione VC risulta, pertanto, un’onda quadra di ampiezza VCC e valor medio VCC/2. Il suo
andamento è rappresentato nella figura seguente. Si osservi che alla frequenza della fondamentale il
gruppo LC risuona serie e, pertanto, si comporta come un corto circuito. Ciò significa che la com
ponente di prima armonica di VC e quella della tensione ai capi del carico RL sono uguali.
134
Alle armoniche superiori, nella serie tra L e C prende il sopravvento la componente induttiva che,
già alla terza armonica, assume un valore di reattanza 9 volte maggiore rispetto a quello della
componente capacitiva il cui effetto decresce ulteriormente al crescere dell’ordine dell’armonica.
Sviluppando in serie di Fourier la tensione VC(t) si ottiene:
(
)
π
1 ∞ sin n 2
+
cos ( nω0t ) VCC
VC =
2 ∑
nπ
n =1
2
La componente continua viene bloccata dal condensatore C e, pertanto, il suo effetto sul carico è
nullo. La prima armonica della tensione di uscita, in base a quanto prima osservato, risulta:
VU 1M = VCC
2
π
Se si calcolano le componenti armoniche superiori si ottiene, per esempio, per la terza armonica:
VU 3M = VCC
VU 3M = VCC
2
3π
RL
R L + j 3ω 0 L +
1
RL =
ω0 L
Q
j 3ω 0 C
VU 1M
RL
2
2 RL
≅ VCC
≅
1
3π ω 0 L
3π 3ω 0 L
9Q
+ j 3ω 0 L +
Q
j 3ω 0 C
Con Q = 10 la componente di 3a armonica della tensione di uscita è 90 volte inferiore a quella di 1a
armonica. In prima approssimazione la tensione di uscita può ritenersi sinusoidale: a partire da una
sorgente di tensione continua si riesce ad ottenerne in questo modo una tensione a radiofrequenza.
Più che di amplificatore è corretto parlare di un convertitore di potenza: allo stato attuale, infatti,
non è possibile individuare un segnale di ingresso ed uno di uscita amplificato. Per comprendere
come il sistema prima descritto possa essere utilizzato nello stadio finale di un trasmettitore è
135
necessario fare alcune considerazioni a cui verrà dedicato spazio nell’ultima parte del Caapitolo.
Vediamo, adesso, come realizzare il commutatore utilizzando dei componenti attivi che lavoreranno
in commutazione. Una possibile soluzione è rappresentata in figura:
La VBE1 e la VBE2 sono sempre in opposizione di fase: se l’ampiezza della tensione di controllo V0 è
sufficiente, alternativamente, uno dei due transistori è interdetto e l’altro è in saturazione. V0 sarà
una sinusoide oppure un’onda quadra (la sua forma non ha effetti diretti sul funzionamento del
sistema purchè l’ampiezza sia in grado di commutare opportunamente i transistori). Nella realtà i
tempi di commutazione non saranno mai nulli, quindi si avrà comunque dissipazione di potenza sui
transistori negli intervalli di tempo in cui corrente e tensione risulteranno contemporaneamente
diversi da zero. Con questi sistemi non si ottiene quindi un’efficienza di conversione effettiva del
100%. Un buon risultato è considerato un valore di h = 80% a frequenze di qualche centinaio di
MHz.
Sebbene in prima approssimazione se il commutatore si comporta in maniera ideale ci si potrebbe
aspettare ci si potrebbe aspettare un’efficienza di conversione unitaria, in realtà bisogna ricordare
che, ai fini della potenza utile, anche quella dissipata sul carico, ma alla frequenza delle armoniche,
è da considerarsi persa. Infatti nella definizione di potenza utile si fa, correttamente, riferimento
alla sola potenza di prima armonica sul carico. E’, pertanto, opportuno, calcolare l’efficienza di
conversione tenendo conto di questa considerazione.
Calcoliamo l’efficienza di conversione: η =
2
VCC
4
PU = 2
π 2 RL
PU
PE
la tensione di 1a armonica sull’uscita è: VCC
Detta ICC(t) la corrente erogata dalla batteria, risulta:
136
2
π
T
PE =
T
V
1
VCC I CC ( t ) dt = CC ∫ I CC ( t ) dt
∫
T 0
T 0
Per metà periodo, quando il transistore 1 è interdetto, ICC(t) è nulla e la corrente che attraversa il
carico si richiude attraverso il transistore 2 che è in saturazione. Per un calcolo rigoroso della
potenza erogata bisognerebbe valutare tutte le armoniche della corrente ICC(t) e calcolare di
conseguenza l’integrale che fornisce la potenza media erogata. Ma, se consideriamo trascurabili le
armoniche superiori della corrente rispetto alla prima (Q→∞), allora la corrente nel carico risulta
sinusoidale e, durante il semiperiodo in cui il transistore 1 conduce, la corrente ICC(t) è un arco di
sinusoide coincidente con la corrente nel carico RL.
Si ottiene, pertanto, quanto di seguito rappresentato:
T
VU 1M
1
I CC (t )dt =
∫
T 0
πRL
PE =
VCC VU 1M
Quindi:
R Lπ
η=
=
valor medio
VCC 2VCC
RLπ π
2
PU
2VCC
RLπ 2
=
=1
PE R L π 2 2VCC
Ovvero, come era ovvio attendersi, non basta ipotizzare che il commutatore non assorba potenza
affinché l’efficienza di conversione risulti unitaria, bisogna anche supporre trascurabile l’effetto
delle armoniche superiori e questo è vero solo se Q è abbastanza elevato.
137
6.2 Trasmettitori
Lo schema a blocchi di trasmettitore rappresentato in figura, ovvero quello con modulazione a
basso livello e successiva amplificazione di potenza, come detto in apertura di Capitolo, non è
l’unico possibile. Ad esso si affianca la soluzione denominata “modulazione ad alto livello” che può
risultare vantaggiosa in taluni casi e in dipendenza dal tipo di modulazione (di ampiezza, di angolo
o mista). Il tipo di modulazione determina, inoltre, la classe di funzionamento dell’amplificatore di
potenza, infatti solo quelli in classe A ed in classe B si comportano linearmente nei confronti
dell’ampiezza del segnale e, quindi, sono adatti ad amplificare segnali modulati in ampiezza, però
l’efficienza di conversione è bassa. Nel caso di segnale modulato in ampiezza in banda laterale
singola, esso può essere posto nella forma:
vSSB = x ( t ) cos (ω 0t ) + q ( t ) sin (ω 0t )
x (t )
q (t )
= x2 + q2
cos (ω 0t ) +
sin (ω 0t )
x2 + q2
x2 + q2
= x 2 + q 2 cos (ω 0t + θ ( t ) )
θ ( t ) = arctg
q (t )
x (t )
Dove q(t) è il segnale in uscita ad un filtro di Hilbert ideale al cui ingresso è posto il segnale
modulante x(t). Come si vede, si tratta di un segnale modulato sia in ampiezza che in fase e,
pertanto, sarà necessario utilizzare un amplificatore di potenza in classe A o B.
L’amplificatore in classe C, invece, ha un comportamento non lineare nei riguardi dell’ampiezza del
segnale di ingresso: basti pensare al fatto che, al crescere dell’ampiezza del segnale di ingresso VSM,
fintanto che non risulta EB+VSM>VT l’angolo di circolazione è nullo e l’uscita rimane a zero.
Superata la suddetta soglia la caratteristica di trasferimento che riporta l’ampiezza della prima
armonica del segnale di uscita in funzione di quella del segnale di ingresso, è del tipo riportato in
138
figura e presenta una forte non linearità caratterizzata da una soglia inferiore e da una soglia di
saturazione.
L’amplificatore in classe C, pertanto, è idoneo ad amplificare segnale modulati in frequenza, ma
non in ampiezza. Infine, l’amplificatore in classe D produce una forma d’onda d’uscita di ampiezza
proporzionale alla tensione di alimentazione e indipendente, quindi, dall’ampiezza del segnale di
ingresso utilizzato per pilotare il commutatore. Anche in questo caso l’unico utilizzo possibile
sembra ristretto al caso di segnali modulati in frequenza da implementare facendo controllare il
commutatore ad un segnale modulato in frequenza a basso livello di potenza.
Un altro blocco circuitale presente solo nel trasmettitore è il modulatore. Limitatamente al caso di
modulazioni analogiche esamineremo, nel seguito, a seconda del tipo di modulazione, le modalità
realizzative del modulatore e la scelta dell’amplificatore di potenza.
6.2.1 Trasmettitori per segnali modulati in ampiezza
Un segnale modulato in ampiezza può essere posto nella seguente forma:
VANT = VAM 1 + ma x ( t ) cos (ω 0t )
Esistono due possibilità di realizzare il trasmettitore ciascuna con vantaggi e svantaggi caratteristici.
1. Modulazione a basso livello.
Lo schema a blocchi è descritto nella figura seguente. L’uscita modulata a basso livello deve
essere ibviata ad un amplificatore di potenza che, in base a quanto prima affermato, dovrà
operare in classe A o in classe B.
139
x(t)
x
Ax(t)cos(ω0t)
+
APRF
ma =
O.L.
ARF
A2cos(ω0t)
A1
A2
Questa soluzione è caratterizzata dai seguenti aspetti negativi: l’efficienza di conversione non sarà
mai quella massima possibile in classe A o in classe B poiché questo risultato è conseguibile solo se
l’ampiezza del segnale è costantemente pari a quella massima accettabile dall’amplificatore senza
andare in saturazione e/o interdizione. E’ ovvio che un segnale modulato in ampiezza non può
soddisfare ad ogni istante tale condizione (altrimenti sarebbe di ampiezza costante!). In ogni caso il
limite del 50% e del 78% rispettivamente per le due classi suddette risulta invalicabile.
Questi aspetti negativi sono controbilanciati da un aspetto positivo: si tratta di una soluzione a larga
banda poiché, contrariamente al caso della classe C e D non vengono impiegati filtri selettivi.
Questo rende la soluzione a basso livello idonea ad applicazioni in multiplexer frequenziale (molti
canali trasmessi contemporaneamente con grande occupazione di banda), oppure nel caso in cui si
debba di continuo cambiare frequenza di trasmissione spaziando su un range di frequenza
razionalmente ampio (caso delle trasmissioni ionosferiche).
Modulazione ad alto livello.
Questa soluzione impiega un amplificatore in classe D nel quale il segnale modulante viene
utilizzato per quella si chiama “modulazione per caratteristica di collettore”. Nella figura seguente è
rappresentato solo il transistore 1 dell’amplificatore in classe D trattato nel paragrafo 6.1.5.
VU 1M = VAM [1 + ma x(t ) ]
vu ( t ) = VU 1M cos (ω0t )
140
2
π
La tensione VCC(t) di collettore si compone, adesso, di due parti: una costante VCC0 fornita dalla
batteria, ed una variabile, controllata dal segnale modulante, che si somma alla prima mediante un
accoppiamento a trasformatore. Ovvero:
A
VCC = VCC 0 + AvS (t ) = VCC 0 1 +
vS (t )
VCC 0
dove la costante A dipende dal rapporto spire e da un eventuale amplificatore a bassa frequenza da
interporre tra il segnale modulante ed il primario del trasformatore di accoppiamento. Ricordando
che il segnale modulante varia molto lentamente rispetto alla portante, potremmo ripetere la
trattazione fatta nel paragrafo 6.1.5 semplicemente sostituendo VCC(t) a VCC. La tensione di uscita
(quasi sinusoidale nell’ipotesi di Q maggiore di 10) risulterebbe, in questo caso, avere un’ampiezza:
VU 1M = VCC (t )
2
π
con
VCC (t ) = VCC 0 [1 +
A
VCC 0
v s (t )]
E, pertanto, se il coefficiente di modulazione risulta
m a=
A
VCC 0
vS ( t ) < 1
si otterrà in uscita un segnale modulato in ampiezza.
Questa soluzione consente di usare un amplificatore ad alta efficienza di conversione. Da osservare,
infine, che l’efficienza è virtualmente unitaria indipendentemente dall’ampiezza del segnale
modulante.
Il problema, di fatto, viene, però, spostato sulla realizzazione ad alta efficienza
dell’amplificatore di potenza a bassa frequenza, non indicato in figura, necessario per pilotare il
primario del trasformatore. Infatti una aliquota considerevole della tensione VCC e, di conseguenza,
un altrettanto considerevole contributo alla potenza erogata, proviene, attraverso l’accoppiamento a
trasformatore, dal segnale modulante il quale deve essere opportunamente amplificato.
L’amplificatore di potenza a bassa frequenza (APBF) nella figura dovrà, a sua volta, essere ad alta
efficienza per non influire negativamente sull’efficienza globale del sistema.
APBF
vS(t)
+_
141
Esistono diverse soluzioni che consentono a basso costo di amplificare un segnale a bassa frequenza
con elevata efficienza di conversione come, ad esempio, l’amplificatore in classe S.
[Nota: Nell’amplificatore in classe S il segnale da amplificare viene utilizzato come soglia di un
comparatore all’altro ingresso del quale viene inviata un’onda triangolare a frequenza molto più
alta. Il risultato è un’onda rettangolare di valore picco-picco grande quanto si vuole (dipende
dall’ampiezza della tensione di alimentazione) e con duty-cycle proporzionale all’ampiezza
istantanea del segnale modulante. Filtrando con un passa basso l’onda rettangolare si riottiene la
forma d’onda modulante. Si tratta di un amplificatore switching che, in base allo stesso principio
che sta alla base del funzionamento ad alta efficienza dell’amplificatore in classe D, permette di
funzionare con efficienza virtualmente unitaria].
Il vantaggio di questa soluzione consiste in una efficienza virtualmente unitaria e indipendente
dall’ampiezza del segnale modulante.
Lo svantaggio, rispetto alla soluzione a basso livello, consiste nella limitazione introdotta sulla
banda passante dalla presenza del filtro ad alto Q.
6.2.2 Trasmettitori per segnali modulati in frequenza
Per amplificare segnali modulati in frequenza o in fase, si adotta lo schema di modulazione a basso
livello seguito da un amplificatore di potenza che può essere in una qualunque della classi prima
esaminate dal momento che non ci si deve preoccupare della linearità in ampiezza. Si può scegliere
quindi un amplificatore in classe C o D per avere massimizzare l’efficienza. E’ questo uno dei
motivi per cui la maggior parte degli attuali standard utilizzano modulazioni ad inviluppo costante.
.
Per quanto riguarda i modulatori vi sono due possibili soluzioni: modulatori diretti e modulatori
indiretti.
Nel primo caso il segnale modulante viene utilizzato per far variare il valore di un parametro
circuitale dal quale dipende la frequenza istantanea di oscillazione di un oscillatore.
142
Nel secondo caso il segnale modulante viene prima integrato e poi utilizzato per modulare in fase
un oscillatore a frequenza stabile (ad esempio un oscillatore quarzato). Un esempio di questo tipo di
soluzione è descritto nel paragrafo 4. e impiega un PLL. Questa seconda soluzione, a fronte di una
maggiore complessità circuitale, presenta il vantaggio di una frequenza centrale (frequenza della
portante) stabile e affidabile, in quanto ottenuta con un riferimento al quarzo. Nel seguito è
rappresentato lo schema a blocchi di un modulatore diretto.
Modulatori di frequenza diretti
Il caso più diffuso di modulazione diretta è quello in cui il segnale modulante x(t) interviene su un
varicap modulando il valore della capacità di giunzione. Se dal varicap (parametro circuitale)
dipende la frequenza istantanea di oscillazione, si ottiene un segnale modulato in frequenza
Un esempio di questa modalità di funzionamento è stato esaminato nel Cap.2 con l’oscillatore di
Clapp il schema circuitale è riportato in figura.
143
A questa soluzione circuitalmente molto semplice, si accompagnano, purtroppo alcuni
svantaggi:
1) la frequenza di oscillazione a riposo (in assenza di segnale modulante), ovvero la frequenza
della portante, dipende dal varicap, dalle condizioni ambientali (derive termiche),
dall’invecchiamento. Essa è scarsamente stabile ed affidabile;
2) la caratteristica che lega la capacità del varicap alla tensione è non lineare e, a sua volta, non
lo è nemmeno quella che lega la frequenza istantanea di oscillazione al valore della capacità.
In questo modo è praticamente impossibile realizzare una modulazione di frequeza lineare
se non per piccolissimi valori del segnale modulante e piccolissime variazioni della capacità
intorno al suo valor medio.
144
Solo per deviazioni di frequenza fD molto piccole si può linea rizzare la dipendenza della frequenza
di oscillazione dal segnale modulante. Questo significa che si possono ottenere valori molto piccoli
dell’indice di modulazione ( D ≈ 10-2 ÷ 10-3).
Per quanto riguarda le derive della frequenza della portante si può ricorrere ad una soluzione
denominata CAF (Controllo Automatico della Frequenza) la quale funziona però solo sotto certe
condizioni per altro facilmente verificabili. Si osservi che le derive termiche e quelle dovute
all’invecchiamento costituiscono un disturbo a bassissima frequenza che risulta sempre separato da
quello del segnale modulante. Indichiamo con ε(t) tale disturbo e con ε(f) il suo spettro (v. figura
seguente).
ε
f
1Hz
Lo schema a blocchi di un anello per il controllo automatico della frequenza è riportato nella
seguente figura
ε
Moltiplicatore di frequenza
2
+
x(t)
1
3
MOD
FREQ
4
xN
PA
7
-
6
DISCR
FREQ
Inversione di polarità
145
5
X
ωQ
Supponiamo che il disturbo
ε (t )
agisca sotto forma di un contributo additivo nel modulatore.
L’espressione del segnale nei vari nodi dell’anello è riportata nel seguito per ciascun nodo:
V2 = x(t ) − V7 (t )
V3 = VFM cos ω0 t + ω D ∫ [x(t ) − V7 (τ )]dτ + ω D ∫ ε (τ )dτ
0
0
t
t
A questo stadio si realizza un valore di dell’indice di modulazione molto minore di quello previsto
dallo standard adottato per la particolare applicazione. In tal modo si può supporre lineare il
modulatore.
Per ottenere, poi, il valore finale di D richiesto dall’applicazione, si utilizza un
moltiplicatore di frequenza per N. Il moltiplicatore per N si realizza con una o più non linearità in
serie (p. es. quadratori, limitatori ecce un opportuni filtraggi per selezionare l’armonica desiderata.
L’uscita del moltiplicatore di frequenza e:
t
V4 = VFM cos Nω0t + Nω D ∫ [x(τ ) − V7 (τ ) + ε (τ )]dτ
0
Lo spostamento in frequenza che si ottiene è N volte maggiore di quello in uscita al modulatore:
f D' =
ωD
N ⇒ D ' = ND
2π
Nell’anello di controllo viene usato come riferimento un oscillatore quarzato con pulsazione ωQ .
L’uscita del mixer viene inviata ad un discriminatore (demodulatore) di frequenza. Esso genera in
uscita una tensione proporzionale allo scostamento della frequenza istantanea di ingresso rispetto ad
una frequenza di riferimento. Come pulsazione di riferimento del discriminatore si sceglie
ωRIF = ωQ-Nω0 . Si ottiene:
t
V5 = V5 M cos (ωQ − Nω0 )t − Nω D ∫ [x(t ) − V7 (τ ) + ε (τ )]dτ
0
V6 = − K D Nω D [x(t ) − V7 (t ) + ε (t )]
Il filtro passa basso lascia passare solo le componenti a bassisima frequenza del segnale V6, quelle
dovute a ε(t). Si ottiene, pertanto:
146
V7 = K D Nω D [− V7 + ε (t )]
V7 [1 + K D Nω D ] = K D Nω D ε (t )
ε (t ) − V7 =
V7 =
(1 + K D Nω D )ε (t ) − K D Nω D ε (t )
1 + K D Nω D
=
K D Nω D ε (t )
1 + K D Nω D
ε (t )
1 + K D Nω D
Quindi:
ε (t )
V3 = VFM cos(ω 0 t ) + ω D ∫ x(τ ) +
dτ
1 + K D Nω D
0
t
1 + K D Nω D
rappresenta il guadagno d’anello del sistema di controllo. L’effetto delle’erroe e(t)
risulta attenuato di un fattore pari al guadagno di anello, rispetto al caso di modulatore ad anello
aperto. Il sistema risulta reazionato nei confronti del disturbo che risulta abbattuto, mentre non lo è
nei riguard del segnale modulante (questo grazie al filtro pasa basso ed alla separazione in
frequenza tra segnale e disturbo).
La soluzione proposta risulta efficace solo nell’ipotesi, tacitamente accettata, che solo il modulatore
di frequenza introduca errore, mentre oscillatore quarzato e discriminatore di frequenza si
comportino in maniera ideale.
6.2.3 Traslazione di frequenza mediante moltiplicatori
Esaminiamo più in dettaglio il caso prima incontrato
in cui si voglia moltiplicare per N la
frequenza istantanea di un segnale modulato. Supponiamo che il valore di N sia molto elevato,
come nell’esempio che segue, dove f0’ è la frequenza della portante in trasmissione
Es:
N = 1036
f0’ = 108 MHz
f0/N
MOD
D
xN
f ’0
D’=DxN
f0 = f0’/N ≈ 108 KHz
Nel caso in esame il modulatore dovrebbe operare ad una frequenza di 108 kHz e, immaginando
che si tratti, ad esempio, di un modulatore FM per lo standard di radiodiffusione, il segnale
modulante ha una banda di 15 KHz: l’ipotesi di modulazione a banda stretta non risulta più
verificata (in altri termini il segnale modulante non risulta sufficientemente “lento” rispetto alla
portante f0 ).
147
Si adotta, allora, la soluzione descritta in figura in cui ad una prima moltiplicazione per N = 36
segue una traslazione in basso mediante un mixer ed una successiva moltiplicazione per N=36. Le
operazioni sono chiaramente descritte in figura:
t
V2 = VFM cos 2π ⋅ 36 ⋅ 3 ⋅ 10 6 t + 36ω D ∫ x(τ )dτ
0
Con la seconda moltiplicazione, eliminando la componente somma, si ottiene in 3 solo il termine
differenza:
t
V3 =V FM cos 2π ⋅ 111 ⋅ 10 6 t − 2π ⋅ 36 ⋅ 3 ⋅ 10 6 t − 36ω D ∫ x(τ )dτ
0
t
= VFM cos 2π ⋅ 3 ⋅ 10 6 t − 36ω D ∫ x(τ )dτ
0
Il segnale è nuovamente centrato su 3 MHz ma con uno scostamento di pulsazione pari a 36ωD .
Con una successiva moltiplicazione per N=36 si ottiene il risultato desiderato.
6.2.4 Trasmettitori per segnali modulati in SSB
Il risultato della modulazione dovrà essere un segnale con uno spettro del tipo in figura.
La cui espressione nel dominio del tempo è:
v(t ) = VSSB [x(t )cos(ω 0 t ) + q (t )sin (ω 0 t )]
Dove q(t) si ottiene mediante un filtro di Hilbert avente le caratteristiche rappresentate in figura.
148
|H(f)|
1
f
x(t)
H(f)
q(t)
<H(f)
π/2
f
-π/2
Supponiamo di voler modulare una portante a 30 MHz in SSB con un segnale audio la cui banda sia
compresa tra 300 Hz e 4.5 kHz.
Lo spettro del segnale modulante è il seguente:
Modularlo intorno a 30 MHz e filtrare la banda laterale sinistra con un filtro a 30 MHz
richiederebbe la disponibilità di un filtro dalle caratteristiche estremamente spinte in grado di
introdurre una attenuazione di diverse decine di dB in una banda frazionale strettissima (600 Hz su
30 MHz!).
Il problema può essere aggirato adottando una soluzione in due successive conversioni di
frequenza: una prima traslazione intorno a 600 KHz, quindi, dopo avere eliminato con un filtro
passa-alto la banda laterale sinistra, si opera una seconda traslazione ed un ulteriore filtraggio
elimina banda.
149
Prima traslazione e filtraggio (si noti che la distanza tra le bande, pur essendo immutata in assoluto,
risulta razionalmente molto più alta rispetto al caso della modulazione diretta a 30 MHz):
Seconda traslazione A 30 MHz (adesso la banda da eliminare è distante 1.2 MHz da quella
passante):
Lo schema a blocchi risulta essere il seguente:
600KHz
MOD
AM
30MHz
X
30MHz-600KHz
OL
La modulazione in banda laterale singola, come è noto, può essere fatta anche nel dominio del
tempo a partire dall’espressione del segnale modulato SSB:
v SSB (t ) = VSSB [x(t ) cos(ω 0 t ) + q (t ) sin (ω 0 t )]
Da un’ispezione diretta si può ricavare il seguente schema a blocchi:
150
Il problema è quello di ricavare, a partire da un unico riferimento, le due oscillazioni sinusoidali in
quadratura di fase per comandare gli oscillatori locali dei due mixer. Saranno esaminate, nel
seguito, due soluzioni: una molto semplice, ma a banda stretta, l’altra, circuitalmente più complessa,
ma a banda larga.
Prima soluzione: analogica a banda stretta
Con riferimento al semplice circuito RC in figura:
vu 1
1
=
vi 1 + jωRC
vu 2
jωRC
=
vi 1 + jωRC
ω0 =
1
RC
f0 =
1
2πRC
vu 1
vi
f0
−π
4
−π
π
∠
2
π
2
f
∠
vu 2
vu 1
vi
vu 2
vi
vi
4
f0
151
f
Sia il passa-alto che il passa basso hanno lo stesso polo
Alla frequenza f0:
vu2 è in anticipo su vu1 di
π
2
infatti:
π
-
Sull’uscita 1 c’è un ritardo di
-
Sull’uscita 2 c’è un anticipo di
4
π
rispetto all’ingresso
4
rispetto all’ingresso
Le due uscite hanno la stessa ampiezza.
La soluzione è a banda stretta perché quanto prima osservato si verifica solo per f ≠ f0.
Seconda soluzione: digitale a banda larga .
Si parte da un oscillatore a onda quadra a frequenza doppia rispetto a f0 e si ricavano i due
riferimenti sfasati di π/2 utilizzando due divisori realizzati con dei Flip-Flop e due filtri passa basso
che estraggano la prima armonica dall’onda quadra in uscita al Flip-Flop
Lo svantaggio di questa soluzione rispetto alla prima è che si deve partire da una frequenza doppia
rispetto a quella desiderata e questo si paga in termini di massima velocità richiesta al circuito e di
consumi.
Come amplificatore di potenza per un segnale SSB che è modulato sia in fase sia in ampiezza,
bisognerebbe utilizzare la classe A oppure la classe B, con conseguente limitazione sulla massima
efficienza di conversione conseguibile.
Una soluzione alternativa è quella denominata a “eliminazione e ricostruzione dell’inviluppo”.
In questo caso dal segnale modulato SSB a basso livello vengono estratti: i) l’inviluppo e utilizzato
per modulare di collettore un amplificatore in classe D; ii) un’onda quadra con fase
θ ( t ) = arctg
q (t )
utilizzata per comandare il commutatore. Lo schema circuitale è rappresentato in
x (t )
figura e il segnale SSB amplificato viene “ricostruito” sull’uscita vu.
152
153
© Copyright 2026 Paperzz