Paper
zz
Explore Categories
Log in
Create new account
No category
Classe 4E - A.S. 2013/14 - prof. Daniele TREVISANI SISTEMI
Download
Report
Lucidi
Document 5217084
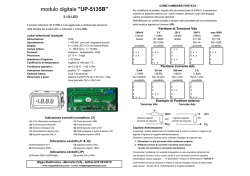
nuove istruzioni UP5135B
Lab E-3
Homework N 5 di Elettromagnetismo e Ottica (CCS Fisica), 22
ADC e DAC - Università degli Studi Roma Tre
parte_1 - Elettronica.ingre
Amplificatore differenziale a BJT
funzione di trasferimento
Sollevatori anteriori per trattori Serie F-US 2t e 3t La
ArduinoRMSMeas -- Overview OBIETTIVI
Amplificatori a transistor e misure - Centro Didattico di Calcolo
© Copyright 2026 Paperzz
About Paperzz
DMCA / GDPR
Report