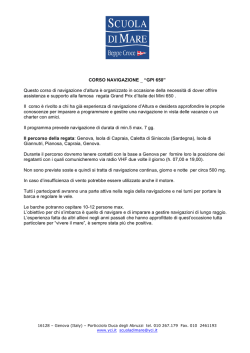
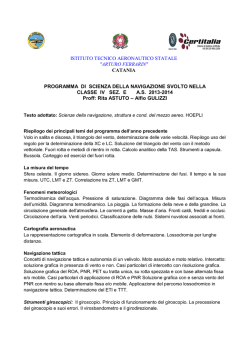
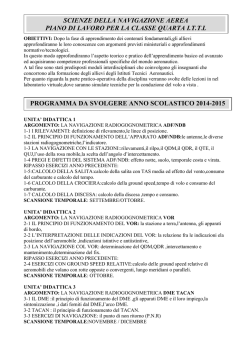
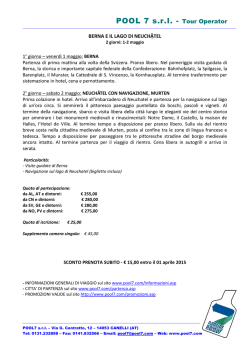
Paolo Di Candia Appunti di SCIENZE DELLA NAVIGAZIONE E TECNOLOGIE NAVALI 2-I Navigazione Stimata – (I) Lossodromia PREFAZIONE La Riforma della Scuola Secondaria Superiore, giunta al IV anno di Corso, ha previsto per gli Istituti Tecnici ad Indirizzo Tecnologico, la confluenza degli ex “Nautici” in Istituti Statali per i Trasporti e la Logistica. Il Piano di studi ministeriale, nell’Articolazione “Conduzione del Mezzo Navale” presenta, al II Biennio e al V Anno, la disciplina denominata “Scienze della Navigazione, Struttura e Costruzione del Mezzo-Nave”. Una riflessione indietro nel tempo conduce a ricordare che già nelle precedenti miniriforme, Sperimentali ed Assistite, per l’Istruzione Nautica (Progetto “ORIONE” 1982, Progetto “NAUTILUS” 1992), le materie tecnico-scientifiche di Indirizzo avevano subito modifiche nella nomenclatura rispetto all’Ordinamento precedente (1961), alterando di poco i contenuti e gli obiettivi di apprendimento, aggiornandoli, ma distribuendoli diversamente nel Biennio di Specializzazione (IV e V classe – Trasporto Marittimo ed Apparati e Impianti Marittimi). Alla neonata trans-disciplina “Scienze della Navigazione, Struttura e Costruzione del Mezzo-Nave”, si esprime un giudizio non positivo per il numero delle ore settimanali assegnate nel triennio, e un parere favorevole della visione unitaria, in quanto la ”Navigazione”, intesa come l’attività di conduzione del Mezzo-navale, richiede delle Competenze ben definite dalle Convenzioni Internazionali (STCW 1978/95), le quali non distinguono più le Abilità da raggiungere per discipline. Del resto, l’obiettivo principale da raggiungere nella conduzione della Nave, nell’attività del Trasporto, è la Sicurezza negli spostamenti, unitamente al fattore economia dell’intera traversata. Ciò non può prescindere dalle responsabilità e idoneità dell’Ufficiale di Navigazione, il quale deve conseguire e, quindi, possedere Conoscenze sulla Struttura della Nave e le sue dotazioni tecnologiche, e saperi che riguardano lo studio dello stato del mare e dell’aria, in quanto essi sono i mezzi fisici in cui vengono espletati i viaggi marittimi. Allora è facile comprendere come la Scienza della Navigazione, intesa anche come Governo e Pilotaggio del Mezzo-Nave e inseguimento di una prestabilita Rotta, comprenda le problematiche della Tecnica dei Trasporti Marittimi per la gestione del carico, e del Tempo Meteorologico per la Sicurezza della Navigazione. Queste considerazioni spiegano l’elaborazione degli Appunti “SCIENZE DELLA NAVIGAZIONE E TECNOLOGIE NAVALI” nella stesura ivi riportata, anche se si è mantenuto la distinzione in tre Parti, e ciò solo per motivi organizzativi della nuova disciplina. Quanto alla programmazione didattica per “Competenze in esito”, esse sono impostate secondo la Direttiva delle Linee Guida Ministeriale, in maniera rigorosa e dettagliata. Gli Appunti che seguono in questa sezione aggiungono gli argomenti relativi alla Navigazione stimata, inserendo un altro tema alla “competenza”: ORGANIZZARE IL TRASPORTO IN RELAZIONE ALLE MOTIVAZIONI DEL VIAGGIO ED ALLA SICUREZZA NEGLI SPOSTAMENTI; le relative “abilità”: Pianificare e controllare l’esecuzione degli spostamenti con metodi tradizionali e con l’ausilio di sistemi informatici utilizzando i software specifici; e “conoscenze”: Traiettorie sulla sfera terrestre: caratteristiche geometriche e metodi risolutivi per il loro inseguimento; Metodi per ricavare la posizione stimata sulla traiettoria programmata; Navigazione astronomica: Parte Prima - Cosmografia. Manfredonia, Settembre 2013 Prof. Paolo Di Candia Navigazione Stimata – (I) Lossodromia COMPETENZA IN ESITO N° 5 ORGANIZZARE LA SPEDIZIONE IN RAPPORTO ALLE MOTIVAZIONI DEL VIAGGIO ED ALLA SICUREZZA DEGLI SPOSTAMENTI Abilità Conoscenze Contenuti - Pianificare il viaggio con criteri di sicurezza ed economicità. - Controllare le procedure esecutive degli spostamenti e apportare eventuali azioni correttive. Traiettorie sulla sfera terrestre: caratteristiche geometriche e metodi risolutivi per il loro inseguimento. Metodi per ricavare la posizione sulla traiettoria programmata, con metodi matematici. - Navigazione stimata: la Lossodromia – L’Ortodromia - Cosmografia La traiettoria lossodromica – La traiettoria ortodromica – La traiettoria brachistocrona (meteorologica, di minor tempo) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 3 Navigazione Stimata – (I) Lossodromia NAVIGAZIONE STIMATA (I - LOSSODROMIA) Il presente e-book è stato realizzato senza fini di lucro; il suo contenuto può essere distribuito e usato liberamente per finalità didattiche e divulgative. Le immagini utilizzate sono, in gran parte, di pubblico dominio e disponibili in rete. Nel rispetto della vigente legislazione, non si intende violare alcun copyright. Eventuali marchi registrati sono di proprietà dei rispettivi titolari. È rigorosamente vietato l’utilizzo e la diffusione a fini commerciali. “Se Pitagora avesse posto il copyright sulle sue tabelline non saremmo mai arrivati sulla Luna” (Pelagusplus) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 4 Navigazione Stimata – (I) Lossodromia NAVIGAZIONE STIMATA LA NAVIGAZIONE LOSSODROMICA: GENERALITÀ L’insieme di operazioni che consente di determinare in ogni istante la posizione del mezzo-Navale sulla traiettoria prescelta in base agli elementi del moto, rotta e cammino, forniti dalla bussola e dal solcometro costituisce la Navigazione stimata. La posizione così ottenuta, a partire inizialmente da un punto noto prende il nome di Punto stimato. Con la navigazione stimata si cerca di inseguire la traiettoria prescelta orientando, in ogni suo punto, la velocità vettoriale della nave lungo la sua tangente. Di conseguenza il punto stimato Ps sarà situato sempre, per definizione, sulla traiettoria prescelta dall'ultimo punto noto. Inseguimento della traiettoria e Punto stimato Ma la velocità vettoriale V, la cui direzione è data dalla bussola ed il cui modulo è fornito dal solcometro, è affetta da incertezza per i vari errori che intervengono nella misurazione dei suoi elementi. Pertanto si stima di inseguire la traiettoria: il punto stimato rappresenta la posizione della nave a meno degli errori dovuti ai vari disturbi, cioè con una certa approssimazione o meglio con una certa probabilità. Le fonti di errore che influenzano gli elementi stimati, rotta e cammino sono: vento, corrente, onde, cattivo governo, errore nella deviazione della bussola, errore nella calibrazione del solcometro, ecc.. Quando si dice che il punto stimato Ps rappresenta il trasporto di una posizione nota lungo una certa rotta e per un certo cammino, ottenuto con la Velocità e il Tempo, occorre specificare se si tratta di velocità rispetto all’acqua (superficiale) o rispetto al fondo (effettiva). Nota. Alcuni testi stranieri, tra cui l’autorevole “American Practical Navigator”, fanno distinzione tra: - Dead Reckoning, cioè determinazione del Punto stimato ottenuto in base alla Rotta superficiale seguita ed alla Velocità rispetto all’acqua; - Estimated Position, cioè determinazione della posizione considerando una stima della Velocità e della Rotta rispetto al fondo. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 5 Navigazione Stimata – (I) Lossodromia Nonostante l’elevato grado di incertezza insito nel Ps, la Navigazione stimata è alla base di tutto il processo navigazione. La conoscenza del Ps è importante per la risoluzione di molti problemi della navigazione astronomica come, ad esempio, nel calcolo delle rette di altezza, del tempo dei crepuscoli, degli azimut, nonché nelle eliminazione dell’ambiguità con i luoghi di posizione radioelettrici, nella determinazione dell’E.T.A. (Estimated Time of Arrival). L’incertezza del Ps e calotta di incertezza L’incertezza del Ps aumenta col tempo. L’errore di stima (es) e la calotta di incertezza aumentano col trascorrere del tempo. Nel momento in cui si determina il Punto nave (con i metodi della navigazione osservata, astronomica, radio assistita, ecc.) l’incertezza diventa zero, cioè si annulla, per poi ricominciare ad aumentare col trascorrere del tempo. Dal punto di vista pratico la navigazione stimata si risolve con l’impiego della formula m = V ⋅ ∆t . La velocità viene data da strumenti che prendono il nome generico di solcometri e si esprime in nodi (1 nodo = 1 miglio in 1 ora); l’intervallo di tempo viene dato da un comune orologio o “mostra” (orologio di confronto) e si esprime in ore e parti decimali di ora. Il cammino m risulta espresso in Miglia Nautiche. Le formule inverse sono: V= m ∆t che consente il calcolo della velocità quando sono noti il cammino percorso e m V che consente il calcolo dell’intervallo di tempo impiegato a percorrere il cammino l’intervallo di tempo impiegato a percorrerlo; ∆t = m alla velocità V. IL PUNTO STIMATO E SUA APPROSSIMAZIONE Durante la navigazione raramente avviene che il Punto stimato coincida con il Punto nave esatto, cioè con il Punto nave osservato o rilevato. Ciò perché, per quanta cura si ponga nel misurare il cammino e governare in Rotta, si verificano quasi sempre degli errori sistematici negli elementi m ed R a causa delle inevitabili imbardate della prora intorno alla direzione della rotta, e ciò indipendentemente da errori accidentali causati da correnti ignote e da altre cause. In genere, si ritiene che l'errore sistematico nella misura del cammino sia di 1 miglio su 20. Lo stesso errore si commette sulla misura della Rotta, ma in senso perpendicolare al cammino; poiché la lunghezza dell'arco di 3° è circa 1/20 del raggio, ne consegue che l'errore sistematico sulla rotta è di ± 3°. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 6 Navigazione Stimata – (I) Lossodromia Approssimazione del “Ps” Tali errori crescono col cammino percorso, cioè aumentano col trascorrere del tempo, per cui è necessario controllare spesso il Punto-nave, soprattutto quando si naviga sotto costa o in zona di pericoli. In figura il quadrilatero rappresenta la Zona di incertezza del Punto stimato. Essa è ampia circa 1 miglio quadrato su un percorso di 20 miglia nautiche. Il Ps più probabile rimane, comunque, il centro di tale zona. I PROBLEMI DELLA NAVIGAZIONE LOSSODROMICA La determinazione della posizione stimata è strettamente legata alla scelta della traiettoria tra due punti della Terra di note coordinate geografiche. Si è già detto che tra le infinite traiettorie che uniscono due punti della Sfera terrestre, quelle di interesse per la navigazione sono la Lossodromia e l’Ortodromia. Lo studio che segue si limita ad esaminare i problemi relativi alla navigazione su percorsi lossodromici o a Rotta vera costante. I problemi fondamentali della navigazione lossodromica sono due: 1. dati A (φ , λ), Rv, m → determinare B (φ’ , λ’); ossia le coordinate del Punto stimato. 2. dati A (φ , λ) e B (φ’ , λ’), → determinare Rv, m; ossia la Rotta vera e il cammino. navigazione per meridiano (e sull’equatore) I meridiani ed i paralleli sono particolari lossodromie in cui i calcoli sono molto semplificati. Si considerino il punto di partenza A e quello di arrivo B situati sullo stesso meridiano della figura seguente, cioè la longitudine dei due punti è la stessa. La Rotta per andare da A a B sarà 0° o Nord se la latitudine di B è maggiore di quella di A; sarà 180° o Sud nel caso contrario. Il cammino in miglia tra A e B è dato dall'arco di meridiano che li congiunge, pari evidentemente alla loro differenza di latitudine. (Si ricordi che 1’ di meridiano = 1 miglio). In questo modo, date le coordinate dei due punti, si è calcolato la Rotta ed il cammino. È possibile quindi convertire la Rotta vera in Prora bussola da dare al timoniere e calcolare il tempo previsto di arrivo o ETA (Espected / Estimated Time of Arrival) nota la Velocità che la nave può sviluppare. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 7 Navigazione Stimata – (I) Lossodromia Navigazione per meridiano, il cammino coincide con la Differenza di Latitudine ∆φ Navigazione sull’equatore, il cammino coincide con la Differenza di Longitudine ∆λ. Viceversa dato un punto A (φ , λ), di partenza, la Rotta vera (0° o 180°) ed il cammino m = V·∆t , per determinare le coordinate del punto di arrivo B (φ’ , λ’), si ha: λ’ = λ φ’ = φ ± ∆φ con ∆φ = m, il segno (+) è relativo a rotta Rv = 000°, quello (-) relativo a rotta Rv = 180°. - Esempio: Un nave naviga da un punto A (φ = 10°24’.8 N ; λ = 40°20’ W ) ad un punto B, percorrendo 224 mg, con Rv = 0°. Determinare le coordinate del punto di arrivo B. m = ∆φ = 224’ = 3°44’ N Sull’Equatore, sarà: φ = 10°24’.8 N + ∆φ = 03°44’ N φ’ = 14°08’.8 N ; m= λ’ = 40°20’ W φ’ = φ = 0° Rv = 90° = E ∆φ = 0° ; ∆λ = m Il ∆λ prende il segno E Rv = 270° = W ∆φ = 0° ; ∆λ = m Il ∆λ prende il segno W Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 8 Navigazione Stimata – (I) Lossodromia - Esempio: Un nave naviga da un punto A (φ = 00° ; λ = 039°40’ W ) ad un punto B, percorrendo con Rv = 90°. Determinare le coordinate del punto di arrivo B. m = ∆λ = 115’ = 001°55’ E λ’ = 039° 40’ W + ∆λ = 001° 55’ E λ’ = 037° 45’ W ; m = 115 mg, φ’ = φ = 00° navigazione per parallelo Quando si naviga per parallelo la latitudine del punto di partenza e la latitudine del punto di arrivo sono uguali. La Rotta vera è 90° o 270°. Il cammino per parallelo mP si calcola tenendo presente la relazione tra arco di parallelo e simile arco di equatore. Si ha quindi mP = ∆λ·cosφ. In cui se ∆λ è espressa in primi mP risulta in miglia. Per il calcolo della posizione dati punti di partenza A (φ , λ), Rotta vera (90° o 270°) ed il cammino mP, si ha: φ' = φ ; λ ' = λ + ∆λ . In cui ∆λ = mP·secφ. Con mP espresso in miglia, ∆λ risulta in primi. NOTA. Immaginiamo di considerare i punti E e F sullo stesso parallelo di latitudine φ e per detti punti conduciamo i meridiani PA e PB. Determiniamo la relazione fra la lunghezza EF dell'arco di parallelo e del corrispondente arco di equatore. Sia R il raggio della sfera e r il raggio del parallelo EF. Per un noto teorema di geometria abbiamo : EF = r ·∆λ AB = R·∆λ Dividendo la seconda per la prima si ha: AB R = EF r Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 9 Navigazione Stimata – (I) Lossodromia Dal triangolo CDE, rettangolo in D, si ha: r = cos ϕ R Quindi: AB = EF·secφ, ossia ∆λ = mP·secφ, cioè l’arco di Equatore è uguale al corrispondente arco di parallelo moltiplicato per la secante della latitudine del parallelo. - Esempio: Una nave in partenza da Manfredonia, segue dal punto A (φ = 41° 37’ N ; λ = 016° 00’.7 E ) rotta vera Rv = 90° per 74 mg. Calcolare le coordinate del punto di arrivo B (φ’ ; λ’ ) . φ = φ' = 41° 37’ N ; ∆λ = mP ·secφ ; ∆λ = 74 ·1,3376048 = 99’,1 = 001° 39’,1 E λ = 016° 00’.7 E + ∆λ = 001° 39’.1 E λ’ = 017° 39’.8 E - 1° Problema della Navigazione lossodromica (caso gen erale): note le coordinate di A (φ , λ), Rv, m → calcolare le coordinate di B (φ’ , λ’) (I° caso: piccole distanze, m < 375 mg e φ < 60°) Si dice lossodromia una curva, a doppia curvatura, tracciata sulla superficie terrestre, che ha la proprietà di incontrare i meridiani con angolo sempre costante. Essa si avvolge infinite volte intorno ai poli senza mai raggiungerli. Una nave che naviga mantenendo costante la Rotta, segue una lossodromia. L’Equatore, i paralleli, i meridiani, sono particolari lossodromie. Come già detto, la lossodromia, sulla Carta di Mercatore, è rappresentata da una retta. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 10 Navigazione Stimata – (I) Lossodromia Sia A il punto di partenza, B quello di arrivo, AB l’arco di lossodromia tra i due punti. Si divida AB in un numero infinito di tratti dm, talmente piccoli da potersi ritenere rettilinei e per ogni punto di divisione si tracci il meridiano e il parallelo. Dal I° dei triangolini rettangoli ottenuti, che si considerano piani, si ha: dφ1 = dm1 ·cosRv dφ2 = dm2 ·cosRv dφ3 = dm3 ·cosRv …………………. dφn = dmn ·cosRv ∆φ = m · cos Rv dp1 = dm1 ·senRv dp2 = dm2 · senRv dp3 = dm3 · senRv ………………….. dpn = dmn · senRv µ = m · senRv Sommando membro a membro, dalla colonna di sinistra si ha: ∆φ = m · cos Rv e, dalla colonna di destra, ritenendo che approssimativamente la somma di tutti gli archetti di parallelo (dp1, dp2, …….. dpn) sia uguale ad un arco di parallelo µ detto appartamento o allontanamento, compreso tra i meridiani di A e di B e posto alla latitudine media φm : µ = m · sen Rv All’arco di parallelo µ corrisponde sull’Equatore un arco di ∆λ , per mezzo della relazione: ∆λ = µ · sec φm e sostituendo a µ il suo valore, si ottiene: ∆λ = m · sen Rv · sec φm La differenza di longitudine ∆λ calcolata con la formula trovata è, per l’approssimazione di µ, affetta da un errore che risulta < di 1’ fino a quando m < 375 miglia e φ < 60°. - Esempio: Una nave in partenza da Gaeta, naviga per 63 mg con rotta Rv = 164°, dal punto A (φ = 41° 13.1’ N; λ = 012° 59’.4 E ). Calcolare le coordinate del punto di arrivo B (φ’ ; λ’ ) . ∆φ = m · cos Rv ; ∆φ = 63 · 0,9612616 = 60’.6 S = 1°00’.6 S ∆λ = m · sen Rv · sec φm φm = (φ + φ’) / 2 φ’ = 40° 12’.5 N + φ = 41° 13’.1 N 2 φm = 81° 25’.6 N ∆λ = m · sen Rv · sec φm ∆λ = 63 ·0,275637 · 1,3192915 = 22’.9 E Appunti di Scienze della Navigazione e Tecnologie Navali 2- I φ = 41° 13’.1 N + ∆φ = 01° 00’.6 S φ’ = 40° 12’.5 N φm = 40° 42’.8 N λ = 012° 59’.4 E + ∆λ = 000° 22’.9 E λ’ = 013° 22’.3 E 11 Navigazione Stimata – (I) Lossodromia - 1° Problema della Navigazione lossodromica (caso gen erale): note le coordinate di A (φ , λ), Rv, m → calcolare le coordinate di B (φ’ , λ’) (II° caso: grandi distanze, m > 375 mg e φ > 60°) Considerando ancora un triangolino infinitesimo (che può ritenersi piano), in cui il cateto formato dall’archetto di parallelo questa volta lo scriviamo (ricordando la relazione con il corrispondente archetto di equatore dλ) : dp = dλ ·cosφ e, applicando il teorema di trigonometria sui triangoli rettangoli: dλ · cosφ = dφ · tangRv dλ = , da cui dϕ ⋅ tan Rv cos ϕ e quindi integrando (sommando i vari tratti): λ' ∫λ ϕ' dλ = ∫ ϕ dϕ ⋅ tan Rv cosϕ E poiché Rv è costante: ∆λ = (φ’c - φc) · tang Rv o meglio: ∆λ = ∆ φc · tang Rv con latitudine crescente φc = logn ·tang (45° + φ /2 ), in radianti . In primi (φc = 7915,7·log10 ·tang (45° + φ /2 ), considerando la Terra sferica. Attribuendo la forma 10800 ' ψ −υ ellissoidica, si ha: ϕ c = ⋅ log e ⋅ tan( 45 ° + ). 3,141592 2 Per il calcolo della differenza di latitudine: ∆φ = m ·cos Rv ∆φ N se la Rv è compresa nel l o IV quadrante S se la Rv è compresa nel II o III quadrante Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 12 Navigazione Stimata – (I) Lossodromia - Esempio: Una nave in navigazione nell’Oceano Atlantico naviga dal punto A (φ = 38°46’ S; λ = 042° 43’ W ), per 423 mg e con rotta Rv = 084°. Calcolare le coordinate del punto di arrivo B (φ’ ; λ’ ) . ∆φ = m · cos Rv ; ∆φ = 423 · 0,104528 = 44’.2 N = 00°44’.2 N ∆λ = ∆ φc · tang Rv ∆φc = φ’c - φc φ’c = 2456’.3 S - φc = 2512’.5 S ∆ φc = 56’.2 N ∆λ = 56’.2 ·9,5143644 = 534’.7 = 008°54’.7 E φ = 38° 46’.0 S + ∆φ = 00° 44’.2 N φ’ = 38° 01’.8 S λ = 042° 43’.0 W + ∆λ = 008° 54’.1 E λ’ = 033° 48’.9 W - 2° Problema della Navigazione lossodromica (caso gen erale): note le coordinate di A (φ , λ) e B (φ’ , λ’) → determinare Rv (rv), m (I° caso: piccole distanze, m < 375 mg e φ < 60°) Dalle formule del 1° problema della lossodromia si ricavano le formule inverse: ∆φ = m · cos Rv ∆λ = m · sen Rv · sec φm Dividendo membro a membro, la seconda per la prima, si ha: ∆λ m ⋅ sin Rv ⋅ sec ϕ m ∆λ = ; semplificando: = tan Rv ⋅ secϕ m ∆ϕ m ⋅ cos Rv ∆ϕ Da cui : tan rv = ∆λ ⋅ cos ϕ m ∆ϕ Alla rotta quadrantale rv si assegnano i cardini: il primo cardine è quello del ∆φ, il secondo è quello del ∆λ . Successivamente si calcola la Rv circolare. Per il calcolo del cammino, dalla prima formula si ha: m = ∆ϕ ⋅ sec Rv Nella soluzione del II problema di lossodromia è preferibile usare la rotta quadrantale rv. - 2° Problema della Navigazione lossodromica (caso gen erale): note le coordinate di A (φ , λ) e B (φ’ , λ’) → determinare Rv, m (II° caso: grandi distanze, m > 375 mg e φ > 60°) Le formule da utilizzare sono: tan rv = ∆λ ' ∆ϕ 'c m = ∆ϕ ⋅ sec rv La prima formula si può usare anche quando m è minore di 375 miglia. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 13 Navigazione Stimata – (I) Lossodromia - Caso particolare della Navigazione lossodromica: coordinate del punto di intersezione della lossodromia con un parallelo Sia A il punto di partenza, Rv la rotta vera, X il punto di incontro della lossodromia con il parallelo di latitudine φx . Rappresentazione schematica sulla Carta di Mercatore Del punto X si conosce la latitudine φx . Occorre calcolare la longitudine λx . Essendo note sia la φ di partenza che quella di arrivo, è possibile calcolare il ∆φcx : ∆φcx = φcx – φc E quindi: ∆λx = ∆φcx ·tang Rv Infine: λx = λ + ∆λx Il segno di ∆λx sarà E se Rv è compresa nel I o II quadrante; sarà W se Rv è compresa nel III o IV quadrante. - Esempio: Una nave diretta da Valparaiso (Cile) allo Stretto di Tsugaru (Giappone) naviga per Lossodromia tra i punti: A (φ = 33° S; λ = 071° 45’ W ) B (φ’ = 41°40’ N; λ’ = 141° 30’ E ) Calcolare la longitudine del punto di intersezione con il parallelo φx = 10° N. Calcolo: Rv = 298°43’.8 m = 9320.2 mg ∆φcx = φ’cx - φc ∆λx = ∆φcx ·tang Rv ∆λx = 2686’.9 ·1,824269 = 4901’.6 = 81°41’.6 W λx = λ + ∆λx Appunti di Scienze della Navigazione e Tecnologie Navali 2- I φ’cx = 599’.1 N - φc = 2086’.9 S ∆ φcx = 2686’.0 N λ = 071° 45’.0 W + ∆λx = 081° 41’.6 W λx = 153° 26’.6 W 14 Navigazione Stimata – (I) Lossodromia - Caso particolare della Navigazione lossodromica: coordinate del punto di intersezione della lossodromia con un meridiano Sia A il punto di partenza, Rv la rotta vera, X il punto di incontro della lossodromia con il meridiano di longitudine λx . Rappresentazione schematica sulla Carta di Mercatore Del punto X si conosce la latitudine λx . Occorre calcolare la latitudine φx . Essendo note sia la λ di partenza che quella di arrivo λx , è possibile calcolare il ∆λx : ∆λx = λx - λ Dalla formula: ∆λx = ∆φcx ·tang Rv si ricava : e quindi: ∆φcx = ∆λx ·cotg Rv φcx = φc + ∆φcx da cui, con passaggio inverso, nelle Tavole Nautiche, si ricava φx . Il segno di ∆φcx sarà N se Rv è compresa nel I o IV quadrante; sarà S se Rv è compresa nel II o III quadrante. - Esempio: Una nave diretta da Valparaiso (Cile) allo Stretto di Tsugaru (Giappone) naviga per Lossodromia tra i punti: A (φ = 33° S; λ = 071° 45’ W ) B (φ’ = 41°40’ N; λ = 141° 30’ E ) Calcolare la longitudine con il meridiano λ x = 100° W. Calcolo: Rv = 298°43’.8 ∆λx = λx - λ m = 9320.2 mg Appunti di Scienze della Navigazione e Tecnologie Navali 2- I λx = 100° 00’.0 W - λ = 071° 45’.0 W λx = 028° 15’.0 W 15 Navigazione Stimata – (I) Lossodromia ∆φcx = ∆λx ·cotg Rv ∆φcx = 1695’.0 · 0,5481647 = 929’.1 N φc = 2086’.9 S + ∆φcx = 929’.1 N φcx = 1157’.8 S φx = 19°03’.6 S CASI PARTICOLARI DELLA NAVIGAZIONE LOSSODROMICA Consideriamo due navi che navigano sulla stessa Lossodromia: una nave S parte dal punto A (φ ; λ) e con velocità VS dirige per B (φ’ ; λ’ ). Un’altra nave T parte da B e con velocità VT dirige per A. - I° Caso: la nave S e la nave T partono simultanea mente in senso opposto Considerando A il punto di partenza e B il punto di arrivo, si calcola (2° Problema di Lossodromia) la RS e il cammino m . Tale cammino rappresenta la distanza iniziale fra le due navi che ogni ora si riduce di (VS + VT) mg, e si annullerà (cioè le due navi si incontreranno) dopo ore di navigazione: ∆t h = m VS + VT La nave S (con rotta RS) avrà percorso un cammino La nave T (con rotta RT) avrà percorso un cammino La RT = RS ± 180° (rotta opposta) : : mS = VS ·∆th mT = VT ·∆th Le coordinate del punto di incontro X delle due navi si calcoleranno risolvendo il 1° Problema di Lossodromia: A (φ ; λ ) RS determinare le coordinate di X (φX ; λX ) mS = VS ·∆th NOTA. Si possono calcolare le coordinate del punto d’incontro X anche partendo da B: B (φ’ ; λ’ ) RT = RS ± 180° determinare le coordinate di X (φX ; λX ) mT = VT ·∆th Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 16 Navigazione Stimata – (I) Lossodromia - 2° Caso: la nave S e la nave T partono dai punti A e B in istanti diversi La nave S parte ∆th prima della nave T . Considerando sempre A punto di partenza e B punto di arrivo, si calcola la rotta RS ed il cammino m fra i due punti. Quando parte la nave T , la nave S ha già percorso un cammino: m’S = VS ·∆th Il cammino che dovrà percorrere la nave S sarà ancora (a partire da A’): mS = VS ·∆Th Quello della nave T, a partire da B e con rotta RT opposta ad RS, sarà: mT = VT ·∆Th Possiamo scrivere la seguente identità: m = m’S + mS + mT ossia: m = VS ·∆th + VS ·∆Th + VT ·∆Th ovvero: m = VS ·∆th + (VS + VT) ·∆Th da cui: ∆T h = m − VS ⋅ ∆t h V S + VT Per avere le coordinate del punto d’incontro X, si dovrà risolvere il 1° Problema di Lossodromia: A (φ ; λ ) RS mS = VS ·∆th + VS ·∆Th determinare le coordinate di X (φX ; λX ) determinare le coordinate di X (φX ; λX ) oppure: B (φ’ ; λ’ ) RT = RS ± 180° mT = VT ·∆Th Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 17 Navigazione Stimata – (I) Lossodromia - 3° Caso: inseguimento Le due navi, S e T, partono entrambe dal punto A (φ ; λ ) ; la nave T, ∆th dopo la nave S, e seguono la stessa rotta (RS = RT) ma con velocità VT > VS . Si vogliono conoscere le coordinate del punto X in cui la nave T raggiunge la nave S. Nell’istante in cui parte la nave T, la nave S ha già percorso un cammino: m’S = VS ·∆th che rappresenta la distanza iniziale fra le due navi. Poiché la nave T ha una velocità VT > VS della nave S, quando l’avrà raggiunto, vorrà dire che ha percorso un cammino: mT = VT ·∆Th e la nave S avrà percorso ancora: mS = VS ·∆Th Possiamo scrivere la seguente identità: mT = m’S + mS VT ·∆Th = VS ·∆th + VS ·∆Th ossia: (VT - VS) ·∆Th = VS ·∆th ovvero: da cui: ∆T h = VS ⋅ ∆t h VT − V S Per avere le coordinate del punto X in cui la nave T raggiunge la nave S , basta risolvere il 1° Problema di Lossodromia: A (φ’ ; λ’ ) RT mT = VT ·∆Th determinare le coordinate di X (φX ; λX ) determinare le coordinate di X (φX ; λX ) oppure: A (φ ; λ ) RS mS = VS ·∆th + VS ·∆Th Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 18 Navigazione Stimata – (I) Lossodromia SOLUZIONE GRAFICA DI CASI PARTICOLARI DELLA NAVIGAZIONE LOSSODROMICA - I° Caso: la nave S e la nave T partono simultanea mente in senso opposto Consideriamo due navi che navigano sulla stessa Lossodromia: una nave S parte dal punto A (φ ; λ) e con velocità VS dirige per B (φ’ ; λ’ ). Un’altra nave T parte da B e con velocità VT dirige per A. Il problema si risolve direttamente sulla carta nautica. Si posizionano le due navi; si traccia la rotta fra i due punti A e B e per essi si tracciano le perpendicolari, una da un lato e l'altra dal lato opposto. Sulle due perpendicolari tracciate si staccano rispettivamente due segmenti uguali a VS e VT. Navi con rotte opposte e partenza simultanea Congiungendo gli estremi C e D di tali segmenti si determinerà l'intersezione X sulla rotta precedentemente tracciata. Il punto X rappresenta il punto d'incontro delle due navi. Conosciuto il punto X è noto come possa determinarsi l'intervallo di navigazione occorrente all'incontro, nonché i cammini mS e mT percorsi rispettivamente dalle navi S e T. Se la partenza delle due navi non è simultanea, basterà calcolare il cammino percorso dalla nave che è partita prima e sottrarlo al cammino totale. Il cammino così determinato sarà quello da considerare nella formula per il calcolo del ∆T. - 2° Caso: inseguimento a) rotte coincidenti, stesso istante, velocità differenti. La nave S parte dal punto A (φ ; λ ) ; la nave T parte dal punto B (φ’ ; λ’ ). Seguono la stessa rotta (RS = RT) ma con velocità VT > VS . Si vogliono conoscere le coordinate del punto X in cui la nave T raggiunge la nave S e l’ora. Si collocano nella loro posizione i punti A e B; si traccia la rotta fra A e B prolungandola dalla parte di B; per i punti A e B si tracciano le rispettive perpendicolari, entrambe dallo stesso lato rispetto alla rotta tracciata. Sulle due perpendicolari si staccano rispettivamente i segmenti AC e BD corrispondenti a VT e VS. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 19 Navigazione Stimata – (I) Lossodromia Incontro di due navi con rotte uguali e partenza simultanea Per gli estremi C e D si traccia un segmento e lo si prolunga fino ad incontrare la rotta nel punto X. Tale punto X rappresenta il punto d'incontro delle due navi. Conoscendo le coordinate di X si possono ricavare i rimanenti dati e cioè: mT, mS, (m = mT – mS), nonché ∆th con la formula ∆th = m /(VT - VS). b) rotte coincidenti, partenza intervallata, velocità differenti. Se la partenza delle due navi non è simultanea, ma una delle due parte prima dell'altra, si dovrà determinare innanzitutto il cammino percorso da quest'ultima. Segnata la nuova posizione della nave che parte prima, il problema si risolve come per il caso delle partenze simultanee. E' superfluo ricordare che VT deve essere maggiore di VS. c) rotte coincidenti, partenza intervallata dallo stesso punto, velocità differenti. Le due navi, S e T, partono entrambe dal punto A (φ ; λ ) ; la nave T, ∆th dopo la nave S, e seguono la stessa rotta (RS = RT) ma con velocità VT > VS . Si vogliono conoscere le coordinate del punto X in cui la nave T raggiunge la nave S. Segnata la nuova posizione della nave che parte prima S , il problema si risolve come per il caso delle partenze simultanee. - 3° Caso: rotta di soccorso o di intercettazione. Questo problema presenta una soluzione analitica ed una grafica (cinematica). Qui viene esaminata soltanto la soluzione grafica che viene realizzata direttamente sulla carta di Mercatore. Sono note: le coordinate dei punti A e B, la Rotta e la Velocità della nave B che vogliamo intercettare, la Rotta e la velocità della nostra nave A prima della manovra. Per raggiungere la nave B possiamo effettuare un cambiamento di rotta, senza variare la velocità VA, una variazione di velocità senza cambiare la rotta, o variare entrambe. Si esamina la prima possibilità. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 20 Navigazione Stimata – (I) Lossodromia Si uniscono con un segmento i due punti A e B. Dalla cuspide del vettore VB si traccia un segmento parallelo ad AB. Con apertura di compasso uguale alla velocità VA, si pone una punta del compasso su A e con l'altra si stacca il punto C, sul segmento parallelo ad AB, precedentemente tracciato. Rotta di intercettazione con accostata e con velocità invariata La direzione AC ci darà la Rotta di intercettazione, con un certo angolo di accostata ed X il punto in cui le due navi si incontreranno. Il tempo occorrente all'incontro sarà dato dal rapporto mA / VA oppure mB / VB . Vediamo come viene risolto il problema con una variazione di velocità ed un cambiamento di rotta. Rotta di intercettazione con variazione di velocità Analogamente a quanto detto per il caso precedente, si uniscono con un segmento i due punti A e B. dalla cuspide del vettore VB si traccia un segmento parallelo ad AB. Supposto che si voglia intercettare la nave B nel punto X’, basterà congiungere con un segmento il punto A con il punto X’; il vettore V’ rappresenta la velocità da assumere con la relativa rotta R’. Allo stesso modo, se si volesse intercettare la nave B nel punto X”, il vettore V” rappresenta la nuova velocità da assumere, con la relativa rotta R”. Nel primo caso si avrà un incremento di velocità rispetto a quella iniziale, mentre nel secondo caso si avrà un decremento di velocità. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 21 Navigazione Stimata – (I) Lossodromia NAVIGAZIONE STIMATA (II - ORTODROMIA) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 22 Navigazione Stimata – (II) Ortodromia NAVIGAZIONE ORTODROMICA Una nave si dice che naviga per ortodromia quando per spostarsi dal punto di partenza a quello di destinazione, segue l'arco di circonferenza massima (circolo massimo) che unisce i due punti e che rappresenta la più breve distanza tra di essi. L'ortodromia forma con i meridiani angoli continuamente variabili, per cui una nave che volesse inseguirla, dovrebbe cambiare continuamente rotta. Essendo ciò impossibile, si segue, nella pratica, una spezzata lossodromica inscritta nell'arco (o circoscritta all'arco) di ortodromia compreso fra i due punti. Un'ortodromia è definita quando sono noti i suoi due parametri e cioè: - l'angolo d'inclinazione α, ossia l'angolo che l'ortodromia forma con l’equatore; si considera l'angolo minore di 90°. Esso deve ritenersi positivo se contato in senso diretto o antiorario, negativo se in senso orario o indiretto. - la longitudine del nodo λN, ossia la longitudine del punto d'incontro dell'ortodromia con l'equatore. Esistono due nodi diametralmente opposti; nota la longitudine dell’uno, basta fare il supplemento a 180° e cambiare segno per avere la longitudine dell'altro. - Vertici, si dicono i punti dell'ortodromia più elevati in latitudine. La latitudine di un vertice è uguale a quella dell'altro vertice, cambiata di segno. La latitudine dei vertici (ϕV1 ;ϕV2) è uguale, in valore assoluto, all’angolo α d'inclinazione dell'ortodromia. Le longitudini dei vertici, (λV1 ; λV2), differenti di 180° fra di loro, differiscono da quelle dei nodi di 90°. I meridiani passanti per i vertici sono perpendicolari all'ortodromia. L’equazione della circonferenza massima è una relazione tra le coordinate di un punto qualunque dell'ortodromia e i suoi parametri. In figura, se A è un punto dell'ortodromia, dal triangolo AA'N1 (dove N, nei riguardi della longitudine, è considerato punto di partenza), applicando il teorema di Nepero per i triangoli sferici rettangoli, si ricava: tan ϕ = sen(λ − λ N ) ⋅ tan α - Rotta iniziale Ri, è l'angolo che l'ortodromia forma con il meridiano nel punto di partenza. - Rotta finale Rf, è l'angolo che l'ortodromia forma con il meridiano nel punto di arrivo. Ri, ed Rf, si contano da 0° a 180°, verso E o verso W, a partire dal polo omonimo della latitudine di partenza. Navigazione Stimata – (II) Ortodromia Prima di percorrere un arco di ortodromia occorre valutarne la lunghezza e confrontarla con quella della lossodromia fra i due punti per stabilire la convenienza di inseguirla o meno. Occorre calcolare le coordinate del vertice e, quando capita tra i due punti, vedere se è conveniente spingersi fino a tale latitudine oppure è preferibile stabilire un parallelo limite da non superare, compiendo un percorso misto. Bisogna infine calcolare le coordinate di una serie di punti dell'ortodromia che, fissati sulla carta di Mercatore e congiunti, daranno la spezzata lossodromica inscritta. Tutti i problemi, cui si è accennato, si risolvono ricorrendo al triangolo ortodromico che ha per vertici il punto di partenza A, quello di arrivo B ed il polo P omonimo alla latitudine di partenza. Spezzata lossodromica con punti equidistanti in ∆λp (o dop) Spezzata lossodromica con metodo della rotte iniziali Calcolo della distanza ortodromica (teorema di Eulero) Siano A (φA ; λA) il punto di partenza e B (φB ; λB) quello di arrivo. Applicando al triangolo sferico ortodromico APB il teorema di Eulero, si ha: NOTA - Teorema di Eulero: “ II coseno di un lato è uguale al prodotto dei coseni degli altri due, più il prodotto dei seni degli stessi lati moltiplicati per il coseno dell’angolo compreso tra i due lati (in questo caso, la differenza di longitudine trai i due punti). cos d o = sen ϕ A ⋅ sen ϕ B + cos ϕ A ⋅ cos ϕ B ⋅ cos ∆ λ AB Navigazione Stimata – (II) Ortodromia Posto: M senϕA⋅senϕB = M cosϕA⋅cosϕB⋅cos∆λAB = N (+ ) se ϕA e ϕB sono omonime ( - ) se ϕA e ϕB sono eteronime Se dalla somma algebrica risulta: cos dO cosdO = M + N N (+ ) se ∆λAB è < di 90° ( - ) se ∆λAB è > di 90° (+ ) si prende dO < 90° ( - ) si prende dO > 90° Calcolo della Rotta iniziale Ri (teorema delle cotangenti) Applicando al triangolo sferico APeB la formula delle cotangenti, si ha: cotg (90° - ϕB) sen (90°- ϕA) = cos (90°- ϕA) cos (∆λAB) + sen (∆λAB) cotg Ri tang (ϕB) cos (ϕA) = sen (ϕA) cos (∆λAB) + sen (∆λAB) cotg Ri e trasportando sen (ϕA)⋅ cos (∆λAB) al 1° membro: tang (ϕB)⋅ cos (ϕA) - sen (ϕA)⋅ cos (∆λAB) = sen (∆λAB)⋅ cotg Ri Risolvendo rispetto a cotg Ri : cot Ri = A cosϕ A⋅tan ϕ B sen∆λ AB cos ϕ A ⋅ tan ϕ B senϕ A − sen∆λ AB tan ∆λ AB ( + ) se ϕA e ϕB sono omonime ( - ) se ϕA e ϕB sono eteronime Navigazione Stimata – (II) Ortodromia B (+ ) se ∆λAB è < di 90° senϕ A tan ∆λ AB ( - ) se ∆λAB è > di 90° Si ha di conseguenza Se risulta: cotg Ri cotg Ri = A – B (algebrica) (+ ) si prenderà Ri < 90° ( - ) si prenderà Ri > 90° (al valore dell’angolo si aggiungono 180°) Al valore dell’angolo semicircolare della Ri ottenuto si trascrivono un prefisso (cardine della latitudine del punto di partenza ϕA ) e un suffisso (cardine della differenza di longitudine ∆λAB ). Esempio: Ri = - 65°35’.8 + 180° → Ri = N 114°24’.2 W). ESEMPIO. Una nave parte da Charlestone (ϕ A = 32°50’ N , λA = 80°01’ W ) , diretta a Brest (ϕ B = 48°28’ N , λB = 05°22’ W ). Determinare do e Ri. Schema di calcolo consigliato: calcolo della distanza ortodromica (do) ϕ A = 32°50’ N ϕ B = 48°28’ N ∆λAB = 74°39’ E sen sen M +N cosdo cos-1 = = = = = = cos tang : sen A -B cotgRi cotg-1 0,542197 0,748570 0,405872 0,147481 0,553352 56°,4026 → cot Ri = calcolo della Rotta iniziale (Ri) ϕ A = 32°50’ N ϕ B = 48°28’ N ∆λAB = 74°39’ E cos d o = sen ϕ A ⋅ sen ϕ B + cos ϕ A ⋅ cos ϕ B ⋅ cos ∆ λ AB = = = = = = = = = = = 0,840251 0,663055 0,264714 0,147481 λB = 05°22’ W - λA = 80°01’ W ∆λAB = 74°39’ E do = 3384,16 nm cos ϕ A ⋅ tan ϕ B senϕ A − sen∆λ AB tan ∆λ AB 0,840251 1,128970 0,964326 0,983711 0,148837 0,834874 50°,14236 Appunti di Scienze della Navigazione e Tecnologie Navali 2- I cos cos cos +N sen = 0,542197 : tang = 3,642891 + B = 0,148837 Ri = N 50°08’.5 E 26 Navigazione Stimata – (II) Ortodromia Calcolo delle coordinate dei vertici (teorema di Nepero) Dal triangolo sferico rettangolo, APeV1 (il meridiano che passa per il vertice è perpendicolare all’ortodromia), si ricava: cos ϕ V1 = cosϕ A · senRi ; ϕ V1 omonima a ϕ A , se Ri < 90° ; ϕ V1 eteronima a ϕ A , se Ri > 90° cotg ∆λV1 = senϕ A · tangRi ; ∆λV stesso segno di ∆λAB , se Ri < 90° ; ∆λV segno contrario di ∆λAB , se Ri < 90° ; λV1 = λA + ∆λV ; sen do V = cotgϕ V · cotgRi ; tan doV = cos Ri tan ϕ A ; cos ∆λV = tangϕ A · cotgϕ V . Nota. Teorema di Nepero: dato un triangolo sferico rettangolo, dopo aver sostituito ai due cateti il loro complemento, il coseno dell’elemento “centrale” è uguale al prodotto dei seni dei due “elementi lontani”, oppure è uguale al prodotto delle cotangenti dei due “elementi vicini”. L’elemento “centrale” è quello rispetto alla quale gli altri due sono entrambi “vicini” oppure entrambi “lontani”. - Coordinate del vertice opposto ( V2 ) ϕ V2 = ϕ V1 , ma di segno contrario λV2 = λV1 + 180° , esplemento e segno opposto a λV1 ; oppure: λV1 − 180° , cambio del segno; Esempio: λV1 = 70° W ; λV2 = 70° + 180° = 250° W ; con l’esplemento: 360° − 250° W = 110° E oppure λV2 = 70° − 180° = 110° E ; - Coordinate dei nodi ( N1 - N2 ) ϕ N1 = 0° ; ϕ N2 = 0° λN1 = λV1 − 90° ; λN2 = λV1 + 90° . Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 27 Navigazione Stimata – (II) Ortodromia 2° Problema dell’Orodromia Siano: A (φA ; λA) il punto di partenza; Ri : la rotta iniziale; mO = cammino ortodromico. Si vogliono determinare le coordinate del Punto Stimato PS, nell’ipotesi di inseguire fedelmente il tratto di Ortodromica mO. Sia ∆λAs la differenza di longitudine tra A e Ps. Applicando il teorema di Eulero, si ha: sen ϕs = cos mo · sen ϕA + sen mo · cos ϕA · cos Ri cot ∆λ AS = cos ϕ A senϕ A − tan mo ⋅ senRi tan Ri λs = λA + ∆λAs Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 28 Navigazione Stimata – (II) Ortodromia Calcolo della Rotta iniziale con la TAV.18 I.I.M. ( Tav. A-B-C) Per il calcolo spedito della rotta iniziale Ri si può utilizzare la Tavola 18 della raccolta di Tavole Nautiche dell’Istituto Idrografico della Marina, meglio note come Tavole ABC, le quali consentono di determinare rapidamente e con la sufficiente precisione (l’approssimazione è al decimo di grado) il valore della rotta. Per determinare il valore di A si entra con ∆λ come argomento al posto di “ANGOLO AL POLO” individuando la colonna d’interesse e con ϕ’ come argomento al posto di “Decl.” individuando la riga corrispondente; il valore di A è dato dall’ intersezione della riga e della colonna così individuate. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 29 Navigazione Stimata – (II) Ortodromia Il segno è positivo + se ϕ e ϕ’ sono omonimi, negativo − se ϕ e ϕ’ sono eteronomi. Ancora con lo stesso valore di ∆λ e con ϕ si entra nella Tavola B e, con procedimento analogo a prima, si determina il valore di B che risulterà positivo + se ∆λ > 90°, negativo − se ∆λ < 90°. In figura è rappresentato un estratto della Tavola B. Attribuiti i segni ad A e B si opera la somma algebrica ottenendo A + B, con questo valore si entra nella Tavola C individuando la colonna con il valore corrispondente. Utilizzando come secondo argomento “Lat” ϕ si individua la riga corrispondente; dall’intersezione della riga e della colonna prescelte si determina il valore della rotta iniziale Ri, espressa in forma quadratale, con il prefisso N o S individuato dal segno di ∆ϕ e dal valore algebrico di A + B, il suffisso E o W è invece individuato dal segno di ∆λ. Di seguito è mostrato un estratto della Tavola C. Lo schema di calcolo da adottare è quello seguente: A = (±) ………. + B = (±) ………. C = (±) ………. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 30 Navigazione Stimata – (II) Ortodromia SPEZZATA LOSSODROMICA Coordinate di una serie di punti dell’ortodromia equidistanti in longitudine fra loro. Sia ∆λAB la differenza di longitudine rea A e B ed n il numero dei punti di cui si vogliono determinare le coordinate. La differenza di longitudine ∆λp tra ogni punto e il successivo è data da: ∆λ p = ∆λ AB n +1 Le longitudini dei Way-Point (1, 2, 3, …….), saranno: λ1 = λA + ∆λp ; λ2 = λ1 + ∆λp ; λ3 = λ2 + ∆λp ; …………….. Per le latitudini, applicando il teorema delle cotangenti (di Vieta): tan ϕ1 = tan ϕ A ⋅ cos ∆λ p + tan ϕ 2 = tan ϕ A ⋅ cos 2∆λ p + tan ϕ 3 = tan ϕ A ⋅ cos 3∆λ p + cos ϕ A ⋅ sen∆λ p tan Ri cos ϕ A ⋅ sen2∆λ p tan Ri cos ϕ A ⋅ sen3∆λ p tan Ri ……… ……… ………. ……… Successivamente, dopo aver determinato le coordinate dei WP, si applicano le formule dei problemi della lossodromia, già note. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 31 Navigazione Stimata – (II) Ortodromia Coordinate di una serie di punti dell’ortodromia equidistanti in cammino fra loro. Sia AB l’ortodromia, do la distanza ortodromica ed n il numero dei punti, compresi fra A e B, di cui si vogliono determinare le coordinate. La distanza dop (distanza ortodromica parziale) tra ogni punto ed il successivo è data da: dO p = dO n +1 Le distanze dei WP (1, 2, 3, …..) da A sono: WP1 → dop WP2 → 2· dop WP3 → 3· dop …………….. Le formule risolutive sono le stesse del caso del 2° Problema dell’Ortodromia: senϕ1 = cos dop· senϕA + sen dop· cosϕA · cos Ri ; senϕ2 = cos 2dop· senϕA + sen 2dop· cosϕA · cos Ri ; …………… …………….. ………………. …………… …………….. ………………. cot ∆λ A1 = cos ϕ A senϕ A − tan do p ⋅ senRi tan Ri cot ∆λ A 2 = cosϕ A senϕ A − tan 2do p ⋅ senRi tan Ri ………………………. λ1 = λA + ∆λA1 ; λ2 = λA + ∆λA2 ; λ3 = λA + ∆λA3 ; λ4 = λA + ∆λA4 ; …………….. Successivamente, dopo aver determinato le coordinate dei WP, si applicano le formule dei problemi della lossodromia, già note. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 32 Navigazione Stimata – (II) Ortodromia Condotta della navigazione ortodromica Nel recente passato l’impiego dell’ortodromia era limitato alle traversate oceaniche allo scopo di risparmiare cammino. L’attuazione risultava alquanto laboriosa, per la quantità dei calcoli necessari alla costruzione della spezzata lossodromia (per la caratteristica dell’ortodromia di variare continuamente l’angolo di rotta) e ciò, nella pratica, rendeva impossibile seguire fedelmente il percorso di circolo massimo previsto. I WayPoint possono essere determinati: - equidistanti in cammino (dop) - equidistanti in ∆λ - equidistanti in ∆ϕ - equidistanti dal Vertice (se interno) - metodo delle successive rotte iniziali. L’attualità dell’ortodromia risiede soprattutto nella diffusione dei calcolatori di bordo o Sistemi di Navigazione Integrata. Questi sistemi computerizzati consentono di disporre della posizione aggiornata della nave (Punto nave = Fix) mediamente da 3 a 6 volte al minuto e, inoltre calcolano la Rotta ortodromica (Ro) tra la posizione attuale e il WP di destinazione. Con ulteriori calcoli automatici, i navigatori computerizzati controllano se la nave si mantiene in rotta e avvisano se è fuori rotta (deriva o scarroccio), oltre un prefissato limite impostato detto Cross Track Error, indicato con XTE o XTC. Il vantaggio di questo metodo di procedere è rappresentato dal fatto che i navigatori computerizzati indicano sempre il cammino più breve da seguire per giungere a destinazione. La logica di funzionamento di questi apparati ricalca il metodo delle successive rotte iniziali, che consiste nel calcolare la nuova rotta iniziale Ri, fino al WP di destinazione, ogni qualvolta la posizione della nave (PN) risulta diversa da quella stimata (PS). In figura è schematicamente mostrato il concetto che sta alla base del metodo seguito. I punti nave Pn1, Pn2, …, rappresentano le posizioni attuali della nave che, avrebbe dovuto trovarsi in Ps1, Ps2,… . I circoli massimi Pn1, Pn2, …. rappresentano i nuovi percorsi da seguire per giungere al punto B di destinazione. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 33 Navigazione Stimata – (II) Ortodromia NAVIGAZIONE MISTA Il vertice dell’Ortodromia molte volte si spinge in latitudini molto elevate. Ciò capita quando i due punti, partenza e destinazione, sono situati nello stesso emisfero e in latitudini poco differenti. Allora, per evitare la navigazione in zone polari, con nebbia, ghiacci galleggianti ed altri pericoli, si stabilisce di non oltrepassare un parallelo prefissato che viene chiamato Parallelo Limite. Tracciamo da A e da B le Ortodromie che hanno il vertice sul parallelo limite V1V2. Queste sono tangenti al parallelo limite nei punti V1 e V2 . Si formano così due triangoli rettangoli sferici APV1 e APV2 . Tra V1 e V2 è compreso un arco di parallelo limite che rappresenta il cammino lossodromico. Il cammino misto è dato da: d1 + m + d2. Per calcolarlo si parte dal triangolo APV1, si ha: cos ∆λV 1 = tan ϕ A tan ϕ L senRi = cos ϕ L cos ϕ A cos d1 = senϕ A senϕ L ∆λV1 sempre omonima di ∆λAB Ri < 90° se ϕA e ϕL sono omonime Ri > 90° se ϕA e ϕL sono eteronime Il primo segno di Ri è quello di ϕA ; il secondo è quello di ∆λV1 d1 < 90° se ϕA e ϕL sono omonime d2 > 90° se ϕA e ϕL sono eteronime Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 34 Navigazione Stimata – (II) Ortodromia Dal triangolo APV2, si ha: cos ∆λV 2 = tan ϕ B tan ϕ L cos d 2 = senϕ B senϕ L cot Ri = senϕ A ⋅ tan ∆λ AV 1 ∆λV2 sempre omonima di ∆λAB d1 < 90° se ϕB e ϕL sono omonime d2 > 90° se ϕB e ϕL sono eteronime Infine, dal triangolo PV1V2, si ha: dove: ovvero: m = ∆λV1V2 · cos ϕ L ∆λV1V2 = λV2 – λV1 ∆λV1V2 = ∆λAB – (∆λV1 + ∆λV2) ; (∆λV1 + ∆λV2) → aritmetica Il cammino misto è dato da: d1 + m + d2 . Le coordinate dei vertici risultano: V1 (ϕ L ; λV1 = λA + ∆λV1) ; V2 (ϕ L ; λV2 = λB + ∆λV2) ; Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 35 Navigazione Stimata – (II) Ortodromia LE CARTE GNOMONICHE Le carte prospettiche Si definiscono carte prospettiche le proiezioni della Terra sferica o ellissoidica su un piano o su una superficie sviluppabile in un piano. Quando si parla di proiezioni, occorre stabilire la posizione del quadro (piano o superficie sviluppabile) e la posizione del punto di vista. I punti della superficie terrestre sono determinati dall'incontro con il quadro delle visuali condotte ad essi dal punto di vista; le varie proiezioni si distinguono a seconda della scelta e del tipo di quadro, a seconda della posizione del punto di vista rispetto al centro della terra. Le rappresentazioni prospettiche si dividono in Proiezioni ortografiche, quando il punto di vista è all'infinito; Proiezioni scenografiche quando il punto di vista è a distanza finita dal centro della Terra; Proiezioni stereografiche quando il punto di vista è situato sulla superficie della Terra; Proiezioni centrografiche o Gnomoniche quando il punto di vista coincide con il centro della Terra. Rappresentazioni prospettiche piane Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 36 Navigazione Stimata – (II) Ortodromia Rispetto al piano o superficie le carte prospettiche si dividono: Piane, Cilindriche e Coniche; le prime hanno come piano prospettico un piano normale alla congiungente centro Terra punto di vista; le seconde hanno come piano prospettico un cilindro tangente o secante alla Terra; le terze hanno come piano prospettico un cono tangente o secante. Rappresentazione prospettiche: a) cilindriche - b) coniche Carta ortografica equatoriale o polare Carta ortografica polare Le relazioni di corrispondenza di un punto a sono: x = ρ ⋅ cos∆λ ; y = ρ ⋅ sen∆λ ρ = R⋅ cosϕ ; x = R⋅ cosϕ ⋅ cos∆λ ; y = R⋅ cosϕ ⋅ sen∆λ da cui (R = 1): x2 + y2 = cos2ϕ equazione del cerchio (paralleli) y = x⋅ tang ∆λ equazione della retta (meridiani) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 37 Navigazione Stimata – (II) Ortodromia Le carte gnomoniche o centrografiche Quando il punto di vista coincide con il centro della Terra si ottengono le carte gnomoniche; si dividono in: centrografica orizzontale, equatoriale e polare. - Carta gnomonica meridiana o Carta di HILLERET In questa proiezione il punto di vista è al centro della Terra ed il piano del quadro è un piano tangente in un punto all'equatore. La carta di Hilleret, come tutte le proiezioni gnomoniche, rettifica i circoli massimi della sfera. Difatti, essi sono determinati, sulla carta, dall’intersezione del piano che contiene il circolo massimo col piano del quadro. Siccome l’intersezione di due piani è una retta, le ortodromie vengono rettificate. L’equatore viene rappresentato da una retta tangente ad esso nel punto T di tangenza. I meridiani sono rappresentati da rette perpendicolari a quella dell’equatore e posti a distanza variabile per una costante differenza di longitudine, distanza che aumenta man mano che ci allontaniamo dal punto di tangenza. I paralleli sono rappresentati da archi di iperbole perché vengono determinati dalla intersezione di coni, aventi per vertice il centro della Terra e per direttrice il parallelo considerato, col piano del quadro. Le carte gnomoniche servono a misurare la distanza ortodromica fra due punti di un circolo massimo, la Rotta iniziale, oppure a determinare le coordinate di una serie di punti dell’otrodromia. Le carte gnomoniche di Hilleret vengono pubblicate in Francia su tre fogli che comprendono tutta la superficie terrestre navigabile. Ciascun foglio si estende per una differenza di longitudine di 120° e una differenza di latitudine di 120°. Nella figura si riporta la carta dell'Oceano Atlantico. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 38 Navigazione Stimata – (II) Ortodromia - Carta centrografica orizzontale o carta gnomonica orizzontale Le carte centrografiche si ottengono quando il punto di vista O è al centro della sfera rappresentativa e il piano di proiezione tangente in punto della sfera. Quando il punto di tangenza è situato tra il Polo e l’equatore, abbiamo le carte gnomoniche generali le quali rappresentano con coniche (ellissi, parabole e iperboli) i paralleli, a seconda il valore del parallelo rispetto alla colatitudine del punto di tangenza. I meridiani sono rappresentati da rette convergenti in un punto che si chiama punto di convergenza dei meridiani. Le coniche Q1Q: equatore ab : piano del quadro tangente nel punto T. L’intersezione dei coni, aventi per vertice il centro della Terra e per direttrice i vari paralleli, col piano ab dà la rappresentazione dei vari paralleli. Se la latitudine del parallelo è maggiore della colatitudine del punto di tangenza, il parallelo è rappresentato, sul piano del quadro, da una ellisse perché il piano taglia i due lati del cono. Se il parallelo ha per latitudine un valore uguale alla colatitudine del punto di tangenza, il parallelo è rappresenta una parabola parabola, poiché il piano taglia solo un lato della base del cono. Quando la latitudine del parallelo è minore della colatitudine del punto di tangenza, l’intersezione del piano del quadro col cono indefiniti dà l’iperbole, come abbiamo visto con la proiezione di Hilleret. Poiché sulle carte gnomoniche americane (generali o orizzontali) il punto di tangenza è situato al parallelo di latitudine 30°, si hanno iperboli da 0° a 60° di latitudine, parabola al parallelo 60° ed ellissi ai paralleli superiori a 60°. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 39 Navigazione Stimata – (II) Ortodromia - Impiego pratico delle carte Gnomoniche generali Le carte gnomoniche generali sono pubblicate dall’Inghilterra e dagli Stati Uniti d’America. L’Inghilterra ne pubblica 5 e cioè quelle del: Nord Atlantico, Sud Atlantico e Oceano Antartico, Nord Pacifico, Sud Pacifico e Oceano Antartico, Oceano Indiano e Oceano Antartico. Gli stati Uniti d’America pubblicano le carte del: Nord Atlantico, Sud Atlantico, Nord Pacifico, Sud Pacifico, Oceano Indiano e quella da Panama al Giappone. Carta gnomonica generale dell’Oceano Atlantico settentrionale A partire dal punto di tangenza è tracciato un arco per la misura della distanza per differenza di latitudine. Nella parte della carta vicina all'equatore (carte americane) è segnato un diagramma per la misura delle distanze per differenza di longitudine. A destra o a sinistra della carta c'è il diagramma delle rotte, che serve a misurare le Rotte iniziali dei vari punti dell'ortodromia. Consideriamo due punti a e b sulla carta, tracciamo la retta che li congiunge e cerchiamo di determinare la distanza ortodromica tra di essi. Dal punto di tangenza T abbassiamo la perpendicolare al tratto ortodromico a b e sia c il piede di essa. Centro in T, e con raggio uguale a cT, si taglia in c’ la curva per la misura della distanza per differenza di latitudine. Questa è un arco di cerchio avente il centro ad uguale distanza tra il polo e il punto di tangenza. Nel punto c' si costruisce il meridiano passante per esso e, su questo meridiano, si portano le distanze c’a’ = ca e c'b' = cb. La differenza di latitudine in primi tra a’ e b' ci dà la distanza richiesta in miglia. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 40 Navigazione Stimata – (II) Ortodromia Per la misura per differenza di longitudine, una volta abbassata la perpendicolare Tc, con apertura di compasso uguale a Tc, si taglia il meridiano di tangenza dalla parte opposta dell'equatore, facendo centro in T. Col valore della latitudine di quel punto sul meridiano del punto di tangenza, in corrispondenza del numero uguale, si costruisce la retta perpendicolare al meridiano di tangenza e si riportano, da una parte e dall'altra del meridiano di tangenza, i segmenti ac e cb. La differenza di longitudine fra gli estremi di essi dà la distanza cercata. Per la misura delle Rotte iniziali si scelgano due punti: il primo deve essere quello del punto in cui si vuoi sapere la rotta iniziale, e il secondo deve essere preso sul tratto ortodromico alla differenza di longitudine di 20°. Fatto ciò si porta il primo punto sul diagramma delle rotte, sul ramo esterno di sinistra se ei naviga verso Est, sul ramo esterno di dritta se si naviga verso Ovest, segnandolo nella posizione della rispettiva latitudine. Poi si segna il valore della latitudine del secondo punto, sulla retta verticale di centro, e si uniscono i due punti segnati con un segmento. Portando, parallelamente a se stesso, il segmento segnato, sulla rosa delle rotte del diagramma, si può leggere il valore della Rotta iniziale. Quando l’ortodromia si estende quasi per meridiano, in modo che una differenza di longitudine di 20° è abbracciata da una grande lunghezza, si ricorre, per la misura delle Rotte iniziali, a speciali tabelle che sono riportate sulle carte americane nella parte inferiore. Quando seguendo l’ortodromia si navigherebbe in latitudini molto elevate, ove non si può o non conviene andare, si può ricorrere alla navigazione mista. Stabilito il parallelo limite da non oltrepassare, da A (partenza) e da B (destinazione) si conducono le tangenti a tale parallelo. Individuati V1 e V2 i punti di tangenza, vengono definiti i due tratti di ortodromica AV1 e BV2 e il tratto di parallelo V1V2 che costituiscono, insieme, il percorso misto. - L’ortodromia sulla carta di Mercatore Il C.M. (Cerchio Massimo = Great Circle), formando angoli variabili con i meridiani, non può essere rappresentato con una retta, proprietà già riconosciuta alla Lossodromia. Il C.M. è rappresentato con una curva che volge la concavità sempre verso l’equatore. Il nodo è un punto di flesso. Si sviluppa sempre in latitudini più elevate della lossodromia passante per gli stessi punti. I tratti di C.M. vicini al flesso sono sempre rettilinei. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 41 Navigazione Stimata – (II) Ortodromia Ogni tratto di circolo massimo rivolge la concavità, oltre che all’equatore, anche al corrispondente arco lossodromico. Il percorso apparentemente più lungo sulla carta di Mercatore si giustifica con l’incremento della scala della latitudine all’aumentare di ϕ (Sϕ = Seq secϕ). Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 42 Navigazione Stimata – (II) Ortodromia - La spezzata lossodromica Esercizio di carteggio. 1 - Determinare l’ortodromia tra il punto di partenza DONEGAL (Irlanda) e il punto di destinazione BELLE ISLE (Canada Orientale). Determinare le coordinate di una serie di punti equidistanti in differenza di Longitudine di 5° (a 10°W, a 20°W, a 25°W …..) le coordinate del Vertice, la lunghezza della distanza ortodromica. 2 - Riportare le coordinate dei Way Point sulla Carta di Mercatore, costruire la spezzata lossodromica; determinare la lunghezza del percorso lossodromico e l’allungamento di cammino confrontato con quello ortodromico. L’ortodromia e la lossodromia sulla carta Gnomonica L’ortodromia e la lossodromia sulla Carta di Mercatore Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 43 Navigazione Stimata – (II) Ortodromia L’esercizio può essere svolto sia sulle carte Gnomoniche e Mercatore che analiticamente. Di seguito si riporta la soluzione effettuata con l’ausilio del computer, con specifici software (es. NAVIGA). I dati evidenziano: ∆λ = 47°57’.0 W ; il vertice è interno, ∆λ AB= 16°44.1’.0 W ; differenza di cammino, m l – m o = 37.2 mg ; Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 44 Navigazione Stimata – (II) Ortodromia I dati relativi al percorso lossodromico e a quello ortodromico sono riportati nel riquadro centrale: Rottainiz = 283°48.6 ; cammino lossodromico = 1733.3 ; cammino ortodromico = 1696.1mg. L’ortodromia, rettificata, sulla carta gnomonica polare. L’intersezione con i meridiani forma sempre un angolo di rotta diverso La lossodromia e l’ortodromia sulla carta di Mercatore (Spezzata lossodromica) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 45 NAVIGAZIONE ASTRONOMICA (III - COSMOGRAFIA) Navigazione Stimata – (III) Cosmografia LA SFERA CELESTE Punti e circoli fondamentali In una notte di cielo sereno, se alziamo gli occhi in alto vediamo il cielo con tanti astri lucenti. Essi ci appaiono tutti alla stessa distanza, come se giacessero su una sfera che ha per centro l'osservatore. In altre parole è come se avessimo, di ciascun astro, considerato la direzione e non la distanza. In realtà gli astri sono a distanze differenti. Tuttavia è molto comodo, nello studio dell'astronomia, rappresentare la volta celeste con una sfera detta Sfera Celeste di raggio arbitrario, ma infinitamente grande, con il centro nel punto in cui si trova l'osservatore. Se si ipotizza l'osservatore essere al centro delta Terra si chiama Sfera Celeste geocentrica; se il centro del Sole, Sfera Celeste eliocentrica; mentre se in un punto qualsiasi della Terra, si chiama Sfera Celeste locale. Emisfero visibile - Emisfero invisibile Le semirette uscenti dall'occhio dell'osservatore e dirette agli astri, intersecano la sfera celeste in tanti punti che rappresentano le proiezioni degli astri sulla sfera. La retta che passa per l'osservatore e che ha la direzione della forza di gravita (filo a piombo) si chiama verticale. Ogni piano perpendicolare alla verticale è un suo piano orizzontale. Il piano orizzontale che passa per gli occhi dell’osservatore si chiama orizzonte apparente, quello che passa per il centro della Terra si chiana orizzonte vero o astronomico. Si fa osservare che, parlando di stelle, è indifferente considerare l’osservatore sulla superficie della Terra o nel suo centro, in quanto le direzioni in cui si osserva una stella dalle due posizioni suddette sono praticamente parallele; inoltre in una rappresentazione in scala della sfera celeste, la terra risulterebbe puntiforme rispetto alle distanze stellari. La verticale di un osservatore incontra la sfera celeste in due punti: lo Zenit e il Nadir. L'Orizzonte Celeste (orizzonte astronomico) è il circolo massimo perpendicolare all'asse Zenit-Nadir. Esso divide la sfera celeste in due emisferi; il primo l’emisfero visibile, che contiene io Zenit e tutte le stelle osservabili, l'altro l'emisfero invisibile, che contiene il Nadir le stelle non osservabili. Prolungando l’asse di rotazione della Terra, esso interseca la sfera celeste nei punti Polo celeste Nord e Polo celeste Sud. È facile rendersi conto come l’angolo PnC-O-N, che rappresenta l’elevazione del polo rispetto all’orizzonte, sia uguale alla latitudine ϕ dell’osservatore. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 47 Navigazione Stimata – (III) Cosmografia Orizzonte vero - Orizzonte apparente In queste due immagini si rappresentano l'orizzonte astronomico (verde) e l'orizzonte apparente (viola). I due orizzonti praticamente coincidono se si aumentano arbitrariamente le dimensioni della Sfera Celeste e quindi si diminuiscono, altrettanto arbitrariamente, le dimensioni della Terra. Il circolo massimo perpendicolare all'asse Polo celeste Nord e Polo celeste sud si chiama Equatore Celeste. Il meridiano dell'osservatore è il circolo massimo passante per i due poli celesti e contiene lo Zenit e il Nadir. Si suddivide in Meridiano superiore e Meridiano inferiore, il primo è l'arco di circolo massimo passante per il Pcn, lo Zenit, MS e PCS, il secondo è l'arco di circolo massimo passante per il PCS il Nadir, Mi Pcn. L'intersezione tra il meridiano superiore con l'equatore celeste è il Mezzocielo superiore MS, l'intersezione del meridiano inferiore con l'equatore celeste si chiama Mezzocielo inferiore Mi. L'arco di meridiano dell'osservatore MsZ è la latitudine dell'osservatore (ϕ ) Se la latitudine è Nord il Polo celeste elevato sarà quello nord Pcn, mentre il polo depresso è il polo celeste sud. Il meridiano del l'osservatore interseca l'orizzonte astronomico in due punti; il punto cardinale Nord quello più vicino al polo celeste nord; il punto cardinale Sud è quello più vicino al polo celeste sud. L'intersezione dell'equatore celeste con l'orizzonte astronomico individua gli altri due punti cardinali: L'Est a destra del Nord e l'Ovest a sinistra del Nord. Gli infiniti circoli massimi passanti per lo Zenit e il Nadir, perpendicolari all'orizzonte celeste sono detti Cerchi Verticali, quelli minori e paralleli all'orizzonte astronomico sono detti Almicantarat. l cerchi massimi passanti per i Poli sono detti Cerchi Orari e quelli minori e paralleli all'equatore celeste sono detti Paralleli di declinazione. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 48 Navigazione Stimata – (III) Cosmografia SISTEMI DI COORDINATE ASTRONOMICHE Per poter determinare la posizione degli astri sulla sfera celeste occorre definirne le proprie coordinate. Esse se dipendono dalla posizione dell'osservatore, sono dette locali, altrimenti sono dette uranografiche. Ciascuno di questi due sistemi di coordinate viene suddiviso a sua volta in due differenti tipi. Locali Coordinate degli astri Uranografiche Altazimutali (h, a); (z, Z) Orarie (δ, t); (p, P) Equatoriali (δ, α) Eclittiche (β, λ) Le coordinate locali altazimutali Sono quelle che hanno per base l'orizzonte astronomico e per poli Io Zenit e il Nadir. - Altezza (h): è l'arco di circolo verticale compreso tra l'orizzonte celeste e l'astro, si conta da O a 90° ed è positiva se l'astro è visibile, negativa se invisibile. - Azimut (a): è l’arco di orizzonte compreso fra il punto cardinale N e il verticale passante per l'astro; si misura, da 0° a 360° in senso orario. - Distanza zenitale (z): è l'arco di circolo verticale compreso fra lo Zenit e l'astro; la distanza zenitale può assumere un valore maggiore o minore di 90° a seconda si tratti di astro sotto l'orizzonte o sopra l'orizzonte z = 90° ± h. - Angolo azimutale (Z); è l’angolo compreso fra il verticale omonimo alla latitudine dell'osservatore e il verticale passante per l’astro; si misura da 0° a 180° verso E o W. L’altezza (h) e lazimut (a) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 49 Navigazione Stimata – (III) Cosmografia Relazione fra l’Angolo azimutale e azimut Le coordinate locali orarie Sono quelle che hanno per base l’equatore celeste e per poli i poli celesti. - Declinazione (δ ): è l’arco di circolo orario compreso fra l’equatore e l’astro; si conta da 0° a 90° e può essere Nord o Sud. - Angolo orario o tempo ( t ): è l’arco di equatore celeste compreso fra il Mezzo cielo superiore e il circolo orario passante per l’astro; si misura da 0° a 360° in senso orario (passante per W). Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 50 Navigazione Stimata – (III) Cosmografia - - Distanza polare ( p): è l’arco di circolo orario compreso fra il polo elevato dell’osservatore e l’astro; può assumere un valore maggiore o minore di 90° a seconda che la latitudine dell’osservatore e la declinazione siano omonime o eteronime, p = 90° ± δ. Angolo al Polo (P): è l’angolo compreso fra il meridiano superiore e il circolo orario passante per l’astro; si misura da 0° a 180° , verso E o verso W. Relazione fra angolo orario (t) e angolo al Polo (P) ECLITTICA La Terra è un pianeta del sistema solare che, oltre a ruotare attorno al proprio asse, gira intorno al Sole. Il moto della Terra intorno al Sole, detto moto di rivoluzione è regolalo dalle leggi della meccanica celeste; per il nostro scopo è sufficiente sapere che: 1. l'orbita descritta dalla Terra è di forma ellittica e il Sole occupa uno dei due fuochi; ciò significa che la distanza Terra-Sole non è costante ma varia ed è massima all'afelio e minima al perielio, mediamente è di circa 149'000'600 chilometri. 2. l'orbita viene descritta in senso diretto antiorario a velocità variabile ed è massima quando la Terra è più vicina al Sole e minima quando la Terra è più lontana dal Sole. 3. il giro completo di rivoluzione della Terra attorno al Sole è detta "rivoluzione siderale" e avviene in un anno siderale. La proiezione dell'orbita terrestre sulla sfera celeste (geocentrica) è una circonferenza massima detta eclittica. Possiamo dire che l'eclittica è l’orbita descritta apparentemente dal Sole in un anno siderale; tale moto apparente è diretta conseguenza del moto reale della Terra attorno al Sole. Il piano dell'eclittica è inclinato rispetto all'equatore di 23°27', ed incontra l'equatore in due punti diametralmente opposti detti: punto equinoziale di primavera, primo punto di ariete, o punto vernale (γ) , il nodo ascendente; punto equinoziale di autunno o primo punto della bilancia (Ω) il secondo, nodo discendente. Nota. Vedi anche APPENDICE. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 51 Navigazione Stimata – (III) Cosmografia L'inclinazione dell'eclittica sull'equatore celeste dà come conseguenza la variabilità della declinazione, infatti: - il 21 marzo si trova all'equinozio di primavera γ (gamma) e la sua δ è zero, passando da valori negativi a valori positivi; - Il 21 giugno si trova al solstizio d'estate e la sua δ è 23°27' Nord; - Il 23 settembre si trova all'equinozio d'autunno Ω (omega) e la sua δ è di nuovo zero, passando da valori positivi a valori negativi. - Il 21 dicembre è al solstizio di inverno e la sua declinazione è 23°27' Sud. Si chiama coluro degli equinozi il circolo massimo che passa per i poli celesti ed i punti equinoziali; è in definitiva il circolo orario passante per i punti equinoziali. Si chiama coluro dei solstizi il circolo massimo che passa per i poli celesti ed i punti solstiziali; è in definitiva il circolo orario passante per i punti solstiziali. Le coordinate uranografiche equatoriali Sono quelle che hanno per base l’equatore celeste e per poli i poli celesti. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 52 Navigazione Stimata – (III) Cosmografia - Declinazione (δ ): è l’arco di circolo orario compreso fra l’equatore e l’astro; si conta da 0° a 90° e può essere Nord o Sud a seconda che l’astro si trova nell’emisfero Nord o emisfero Sud. Ascensione retta ( α ): è l’arco di equatore celeste compreso fra il punto gamma γ e il circolo orario passante per l’astro; si misura da 0° a 360° in senso antiorario (visto dal PnC). Coascensione retta: è l’arco di equatore celeste compreso fra il punto gamma γ e il circolo orario passante per l’astro; si misura da 0° a 360°; (360° - α): in senso orario (visto dal PnC). MOTO APPARENTE DIURNO DEGLI ASTRI Per effetto del moto di rotazione della Terra in senso antiorario o diretto, glia stri sembrano muoversi in senso contrario in modo che ciascuno di essi descriva, in un giorno, il proprio parallelo di declinazione. Tale moto è apparente avviene in senso orario visto dal Polo celeste Nord. Quando il parallelo di declinazione di un astro è intersecato dall’orizzonte astronomico, l’astro per alcune ore del giorno risulta visibile, per altre risulta invisibile. Quando l’astro interseca l’orizzonte astronomico ad oriente sorge, ad occidente tramonta. Si possono ricavare alcune regole fondamentali che governano il moto degli astri. - Osservatore con latitudine Nord. Astro A: la sua declinazione (δ) è minore della colatitudine (90°- ϕ) ed omonima alla latitudine. L’astro è sorgente e tramontante; l’arco diurno è maggiore dell’arco notturno. Quando è in meridiano superiore (culminazione superiore) la sua altezza è massima, mentre l’azimut = 180°; il tempo dell’astro t = 0°. Quando è al passaggio in meridiano inferiore (culminazione inferiore), la sua altezza è massima negativa, mentre l’azimut = 0°; il tempo dell’astro t = 180°. Moto apparente diurno degli astri. Massimo degli occulti, massimo degli apparenti. - Astro B: la sua declinazione (δ) è minore della colatitudine (90°- ϕ) ed eteronima alla latitudine. L’astro è sorgente e tramontante; l’arco diurno è minore dell’arco notturno. Quando è in meridiano superiore (culminazione superiore) la sua altezza è massima, mentre l’azimut = Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 53 Navigazione Stimata – (III) Cosmografia 180°; il tempo dell’astro t = 0°. Quando è al passaggio in meridiano inferiore (culminazione inferiore), la sua altezza è massima negativa, mentre l’azimut = 0°; il tempo dell’astro t = 180°. - Astro N’: descrive un particolare parallelo, detto massimo degli apparenti; in questo caso la sua declinazione (δ) è uguale alla colatitudine (90°- ϕ), l’astro risulta sempre visibile. - Astro S’: descrive un particolare parallelo, detto massimo degli occulti; in questo caso la sua declinazione (δ) è uguale alla colatitudine (90°- ϕ), però eteronima; l’astro risulta sempre invisibile. - Astro C: sua declinazione (δ) è maggiore della colatitudine (90°- ϕ) ed omonima; l’astro risulta sempre visibile. Tali astri si dicono circumpolari. - Astro D: sua declinazione (δ) è maggiore della colatitudine (90°- ϕ), però eteronima; l’astro risulta sempre invisibile. Tali astri si dicono anticircumpolari. L’astro che ha declinazione (δ) = 0° descrive l’equatore celeste, sorge nel punto cardinale Est e tramonta nel punto cardinale W. L’arco diurno è uguale all’arco notturno. REGOLE | δ | < | 90°- ϕ | , l’astro è sorgente e tramontante, se ϕ e δ sono omonimi l'arco diurno è maggiore dell'arco notturno; se eteronomi l'arco notturno è maggiore dell'arco diurno. | δ | > | 90°- ϕ | , l’astro è sempre visibile se ϕ e δ sono omonimi; l'astro è sempre invisibile se se ϕ e δ sono eteronomi. Tutti gli astri sorgenti e tramontanti sorgono tra il punto cardinale Est e il punto cardinale omonimo alla declinazione δ, tramontano tra il punto cardinale Ovest e il punto cardinale omonimo alle δ. Durante il moto apparente diurno di un astro sorgente e tramontante, la sua altezza è zero quando sorge, poi cresce e quando raggiunge il massimo valore, l'astro giunge in meridiano (altezza di culminazione); in questa fase l'astro si trova nell'emisfero orientale. Dopo aver stazionato per un breve periodo in meridiano, l'astro scende fino a quando la sua altezza diventa nuovamente zero e quindi tramonta; da questo punto l'astro è invisibile e lo rimane fino a quando non sorge nuovamente. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 54 Navigazione Stimata – (III) Cosmografia Moto apparente diurno del Sole (agli equinozi e ai solstizi), per un osservatore in latitudine media Le coordinate uranografiche eclittiche La base del sistema delle coordinate uranografiche eclittiche è l'eclittica; il semicerchio origine è il meridiano d'eclittica passante per il punto vernale γ. Le coordinate di un astro sono: - la latitudine celeste, o latitudine di eclittica β; - la longitudine celeste, longitudine di eclittica λ. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 55 Navigazione Stimata – (III) Cosmografia Si chiama latitudine celeste di un astro la distanza sferica tra l'astro e l'eclittica; o anche: l'arco di meridiano di eclittica (≤ 90°) compreso fra l'eclittica e l'astro, contata da 0° a 90°dall' eclittica verso i poli di essa ed è di specie Nord o Sud secondo che l'astro si trova nell'emisfero nord o nell'emisfero sud, rispetto alla eclittica. Si chiama longitudine celeste (λ) di un astro l'arco di eclittica, compreso tra il punto vernale (γ) e il piede del meridiano dell'astro, contata da 0° a 360° nel senso diretto (o antiorario), per un osservatore che dal polo Nord guardi l'eclittica. TRASFORMAZIONE DI COORDINATE ASTRONOMICHE Il triangolo di posizione astronomico Se si considera un astro A sulla sfera celeste e lo si riferisce sia al sistema locale orario sia al sistema altazimutale di coordinate, si viene a determinare un triangolo sferico che ha per vertici il Polo elevato (PNc o PSc), lo Zenit e l’astro A. Per lati la colatitudine (c = 90° - ϕ ), la distanza polare (p = 90° - δ ) e la distanza zenitale (z = 90° h). Per angoli: l’angolo al polo P, l’angolo azimutale Z e l’angolo parallattico A o angolo all’astro. Il triangolo di posizione astronomico Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 56 Navigazione Stimata – (III) Cosmografia Trasformazione di coordinate locali orarie in coordinate altazimutali Noti tre dei suoi elementi (angoli o lati) si possono determinare gli altri tre risolvendo il triangolo. La risoluzione può essere grafica, utilizzando la proiezione ortografica meridiana o analitica, ricorrendo alle formule della trigonometria sferica. In questo secondo caso, dal teorema di Eulero risulta che: cos (90° - h) = cos (90° - ϕ )⋅ cos (90° - δ ) + sen (90° - ϕ )⋅ sen (90° - δ )⋅ cos P sen h = sen ϕ ⋅ sen δ + cos ϕ ⋅ cos δ ⋅ cos P Ponendo: sen ϕ ⋅ sen δ = A e cos ϕ ⋅ cos δ ⋅ cos P = B il termine A assumerà un valore positivo ( + ) o un valore negativo ( - ) in funzione della distanza polare, che può essere minore o maggiore di 90°. Il segno della funzione trigonometrica coseno assume un valore positivo quando minore di 90°, negativo quando maggiore di 90°. Il termine B assumerà un valore positivo ( + ) o un valore negativo ( - ) in funzione del coseno dell’angolo al Polo (P) che può assumere valori compresi fra 0° e 180° verso E o W, per la stessa ragione sopra ricordata. In definitiva: A ( + ) quando ϕ e δ sono omonime (stesso cardine) ( - ) quando ϕ e δ sono eteronime (diverso cardine) B ( + ) quando P < 90° ( - ) quando P > 90° A + B è algebrica Dal teorema delle cotangenti, risulta che tra le funzioni circolari dei lati e degli angoli del triangolo sferico astronomico sussiste le seguente relazione: cotg (90° - δ )⋅ sen (90° - ϕ ) = cos (90° - ϕ )⋅ cos P + sen P⋅ cotg Z tg δ ⋅ cos ϕ = sen ϕ ⋅ cos P + sen P⋅ cotg Z sen P⋅ cotg Z = tg δ ⋅ cos ϕ - sen ϕ ⋅ cos P cot Ζ = Ponendo: cos ϕ ⋅ tan δ sen ϕ − sen Ρ tan Ρ cos ϕ ⋅ tan δ =M sen Ρ M e sen ϕ = N tan Ρ ( + ) quando ϕ e δ sono omonime (stesso cardine) ( - ) quando ϕ e δ sono eteronime (diverso cardine) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 57 Navigazione Stimata – (III) Cosmografia N ( + ) quando P < 90° ( - ) quando P > 90° M – N è algebrica Nel caso in cui M – N risultasse un numero negativo, significa che l’angolo corrispondente è superiore a 90°, cioè vuol dire che per determinare l’angolo azimutale bisogna aggiungere 180° all’angolo quadrantale ottenuto. I cardini dell’angolo azimutale ( Z ) sono determinati dalla latitudine (ϕ ) dell’osservatore e dall’angolo al polo (P). La Tav. n° 18 delle Tavole Nautiche, detta Tavola A B C, consente la risoluzione della formula in maniera tabulare; entrando, infatti, con i valori di P, ϕ e δ si determina il valore dell’angolo azimutale Z. Trasformazione di coordinate altazimutali in locali orarie Dal teorema di Eulero risulta che: cos (90° - δ ) = cos (90° - ϕ )⋅ cos (90° - h ) + sen (90° - ϕ )⋅ sen (90° - h )⋅ cos Z sen δ = sen ϕ ⋅ sen h + cos ϕ ⋅ cos h ⋅ cos Z Ponendo: sen ϕ ⋅ sen h = A e cos ϕ ⋅ cos h ⋅ cos Z = B il termine A assumerà per astri (sopra l’orizzonte) un valore positivo ( + ). Il termine B assumerà un valore positivo ( + ) o un valore negativo ( - ) in funzione del coseno dell’angolo azimutale (Z) che può assumere valori compresi fra 0° e 180°, verso E oppure W. Il segno della funzione trigonometrica coseno assume un valore positivo quando minore di 90°, negativo quando maggiore di 90°. In definitiva: A sempre ( + ), per astri visibili B ( + ) quando Z < 90° ( - ) quando Z > 90° A + B è algebrica Il cardine della declinazione (δ ) è determinato dal segno risultante da A + B. Il coseno della distanza polare (90° - δ ) diventa negativo per angoli maggiori di 90°, indicando che la declinazione (δ ) è di segno opposto alla latitudine (ϕ ) dell’osservatore. Allora possiamo dire che: A + B positivo, declinazione (δ ) di cardine uguale alla latitudine (ϕ ) dell’osservatore A + B negativo, declinazione (δ ) di cardine contrario alla latitudine (ϕ ) dell’osservatore Dal teorema delle cotangenti, risulta che tra le funzioni circolari dei lati e degli angoli del triangolo sferico astronomico sussiste le seguente relazione: cotg (90° - h )⋅ sen (90° - ϕ ) = cos (90° - ϕ )⋅ cos Z + sen Z⋅ cotg P tg h ⋅ cos ϕ = sen ϕ ⋅ cos Z + sen Z⋅ cotg P sen Z⋅ cotg P = tg h ⋅ cos ϕ - sen ϕ ⋅ cos Z Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 58 Navigazione Stimata – (III) Cosmografia cot P = Ponendo: cos ϕ ⋅ tanh sen ϕ − senZ tan Z cos ϕ ⋅ tanh =M senZ e sen ϕ = N tan Z il termine M assumerà per astri visibili (sopra l’orizzonte) un valore positivo. Il termine N assumerà un valore negativo o positivo in funzione della tangente dell’angolo azimutale (Z), che può assumere valori compresi tra 0° e 180° verso E o W. Il segno della funzione trigonometrica cotangente assume un valore positivo quando miniore di 90°, negativo quando maggiore di 90°. M N sempre ( + ), per astri visibili ( + ) quando Z < 90° ( - ) quando Z > 90° M − N è algebrica Nel caso in cui M – N risultasse un numero negativo, significa che l’angolo corrispondente è superiore a 90°, cioè vuol dire che per determinare l’angolo al Polo (P) bisogna aggiungere 180° all’angolo quadrantale ottenuto. Il cardine dell’angolo al Polo ( P ) è determinato dal secondo cardine dell’angolo azimutale ( Z ). La Tav. n° 18 delle Tavole Nautiche, detta Tavola A B C, consente la risoluzione della formula in maniera tabulare; entrando, infatti, con i valori di Z, ϕ e h si determina il valore dell’angolo al Polo ( P ). Noto l’angolo al Polo ( P ) si determina l’angolo orario ( t ) con le formule già note: PW , t = P PE, t = (360° - P) Casi particolari del triangolo di posizione Il triangolo di posizione è in generale un triangolo sferico obliquangolo, a meno dei seguenti casi particolari in cui è rettangolo: P = 90° : l’astro è al Primo Orario E , oppure W Z = 90° : l’astro è al Primo Verticale E , oppure W A = 90° : l’astro è alla massima digressione E , oppure W - Determinare dell’altezza e dell’azimut di un astro al passaggio al 1° Orario. Dati : ϕ , δ ; P = 90° determinare : h , a ; calcolo di h sen h = sen ϕ · sen δ calcolo di Z cotg Z = cos ϕ · tang δ ; da Z si passa all’ aZ Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 59 Navigazione Stimata – (III) Cosmografia - Determinare l’angolo orario e l’altezza di un astro al passaggio al 1° verticale. Dati : ϕ , δ ; Z = 90° determinare : t , h ; calcolo di t cos P = cotg ϕ · tang δ ; da P si passa a t senδ calcolo di h senh = senϕ - Determinare l’angolo orario, l’azimut e l’altezza di un astro all’elongazione Dati : ϕ , δ ; A = 90° determinare : t , a , h ; calcolo di t tang P = cotg δ · tang ϕ ; da P si passa a t cosδ senZ = ; da Z si passa all’ aZ calcolo di aZ cosϕ senϕ senh = calcolo di h senδ Nel caso in cui : P = 0° oppure P = 180° , l’astro si trova al passaggio in meridiano superiore o inferiore. In questo caso anche A e Z sono pari a 0° o 180° , i tre vertici si trovano su uno stesso cerchio massimo e le relazioni fra i lati diventano relazioni algebriche. Si ricordi, inoltre, che se: ϕ = 90° , sono indeterminati l’azimut, l’angolo orario e l’angolo all’astro, in quanto il triangolo di posizione (coincidendo i due vertici Z e P) cessa di esistere. Analogamente se: h = 90° , (coincidono Z e A), l’azimut è indeterminato; se: δ = 90° , (coincidono A e P), l’angolo all’astro e l’angolo orario sono indeterminati. IL TEMPO E LA SUA MISURA Tralasciando ogni considerazione di ordine filosofico, ci limiteremo a definire alcune nozioni fondamentali che sono alla base delle misura del tempo e non solo per quello che riguarda la Navigazione Astronomica, ma anche per la sua importanza nella vita civile. Alla base della misura del tempo deve essere posto necessariamente un moto di tipo uniforme, e che rimanga tale più a lungo possibile. Da sempre si è accettato come moto fondamentale di riferimento per la misura del tempo il moto apparente diurno e quindi un giro completo della Terra intorno al suo asse, detto Giorno, con i suoi multipli e sottomultipli. Per poter misurare il giorno, occorre scegliere un astro di riferimento e quindi definire il giorno come l'intervallo di tempo che trascorre tra due passaggi consecutivi dell'astro allo stesso meridiano di un generico osservatore. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 60 Navigazione Stimata – (III) Cosmografia Se l'astro scelto come riferimento è il punto vernale gamma γ, si definisce il giorno sidereo (siderale), cioè l'angolo orario del punto γ. Il giorno sidereo è però più corto della rotazione terrestre, di circa 0,008 secondi, ed inoltre non è costante, per il fenomeno della precessione e nutazione dell'asse di rotazione terrestre. Angolo orario del punto gamma (tempo sidereo) D'altra parte, nella vita civile, è utile riferirsi al Sole e, prendendo come riferimento quest'ultimo, si hanno giorno solare vero e il tempo vero. Il Sole presenta un problema: si sposta apparentemente sull'eclittica di circa 1° al giorno e non sempre con la stessa velocità; ciò comporta che il giorno vero è più lungo di circa 4m rispetto ad una rotazione terrestre. In pratica il giorno vero non è di nessuna utile applicazione. Poiché i giorni solari veri hanno durata differente ed occorre per la misura del tempo, una durata costante, è stato introdotto il giorno medio, che risulta dalla media aritmetica di un gran numero di giorni veri, compresi in alcuni anni tropici interi. Per una definizione più precisa del giorno medio, sono stati introdotti due Soli immaginari, detti fittizio o dinamico l'uno e medio l'altro. - Il Sole fittizio o dinamico è un astro immaginario che percorre l’eclittica con moto uniforme, passando con il Sole vero al perigeo e all'apogeo. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 61 Navigazione Stimata – (III) Cosmografia - Il Sole medio è un astro immaginario che percorre con moto uniforme l'equatore celeste, passa al punto vernale γ nello stesso istante del Sole fittizio e vi ritorna alla fine di un anno tropico, dopo 365,2422 giorni solari veri. Il Sole dinamico poiché percorre l'eclittica con moto uniforme, ha un moto uniforme in longitudine celeste ma non in ascensione retta. II Sole medio invece, poiché percorre con moto uniforme l'equatore celeste ha anche un moto uniforme in ascensione retta. Giacché l'anno tropico contiene 365,2422 giorni solari, l'ascensione retta media, in un giorno solare medio varia di: αm = 24 h (24 ⋅ 60 ⋅ 60) s 86400 s = = = 3m 56 s ,56 365,2422 365,2422 365,2422 Si definisce giorno solare medio o giorno medio l'intervallo di tempo che trascorre tra due passaggi consecutivi del centro del Sole medio allo stesso meridiano. giorno sidereo giorno solare vero tempo solare vero - Equazione del tempo L'equazione del tempo è la differenza tra il tempo solare vero e il tempo solare medio. E' espressa generalmente in minuti e secondi. Tale differenza dipende dal fatto che il tempo solare medio è basato sul movimento di un Sole ipotetico (il Sole medio) che nel corso dell'anno si muove con moto uniforme lungo l'equatore celeste, mentre il moto annuo del Sole vero lungo l'eclittica non è uniforme. L'equazione del tempo varia con regolarità nel corso dell'anno passando da valori negativi a valori positivi ed è tabulata in tutti gli almanacchi. Essa rappresenta il ritardo (quando ha valori negativi) o l'anticipo (quando ha valori positivi) accumulati nel corso dell'anno tra la posizione del Sole vero e quella del Sole medio. Il Sole vero anticipa o ritarda al massimo di circa 16 minuti il suo passaggio al meridiano rispetto al Sole medio. Quando i due Soli culminano insieme (sono in congiunzione), l'equazione del tempo si annulla. Ciò accade quattro volte all'anno (il 15 aprile, il 15 giugno, il primo di settembre e il 25 dicembre). Assume valori assoluti massimi quattro volte l'anno: - verso il 12 febbraio (- 14m,4) - verso il 15 maggio (+ 3m,8) - verso il 27 luglio (- 6m,3) - verso il 3 novembre (+ 16m,4) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 62 Navigazione Stimata – (III) Cosmografia Lo schema che segue rappresenta la sfera celeste vista da un osservatore che sta sopra il polo Nord. Il cerchio esterno rappresenta P il polo nord celeste, Z lo zenit, Ms il mezzocielo superiore, Sm il Sole medio (lungo l'equatore), Sv il Sole vero (lungo l'eclittica), tm il tempo medio, tv il tempo vero, Et , (εm) l'equazione del tempo. Equazione del tempo - Relazioni tra le ore simultanee di due osservatori che si trovano su meridiani diversi Ci sono molte ragioni che concorrono alla necessità di avere un unico tempo di riferimento sulla Terra, e a tal fine si è scelto il Meridiano di Greenwich. Il tempo medio riferito al meridiano di Greenwich lo si è chiamato Tempo Universale indicato con UT; per tradizione lo indicheremo con Tm distinguendolo dal tm che è il tempo medio riferito ad un meridiano qualsiasi. Se indichiamo con O l'osservatore e quindi PnO il meridiano relativo all'osservatore, PnG il meridiano di Greenwich ed infine A l'astro, risulta che tra gli angoli compresi tra le tre direzioni sussiste la seguente relazione: t=T+λ ; T=t −λ ; λ=t−T La determinazione dell' UT viene fatta mediante osservazioni astronomiche in centri specializzati e poi radiotrasmessi mediante i segnali orari. A bordo viene conservato con il cronometro marino. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 63 Navigazione Stimata – (III) Cosmografia Per anni si è creduto il Tm rigorosamente costante, in quanto direttamente legato alla rotazione terrestre, poi invece si è scoperto che il moto di rotazione della Terra non è uniforme e ciò creò problemi specialmente quando il secondo divenne un unità di misura troppo grande. Per evitare problemi nel 1967 venne definito il secondo del Sistema Internazionale come: la durata di 9.192631,770 (circa nove miliardi) di oscillazioni della radiazione dell'atomo di Cesio 133 ed esso è andato in vigore dal primo gennaio 1972. In questo modo ci si è svincolati dalla rotazione terrestre; siccome il tempo atomico e il tempo medio tendono a divergere, quest’ultimo va rifasato. Questo tempo medio legato al tempo atomico si chiama Tempo Universale Coordinato - UTC. La relazione sopra riportata è valida per qualsiasi longitudine a condizione di ritenerla algebrica, dando il segno positivo alle longitudini E, e negativo alle longitudini W, come si usa universalmente nelle navigazione. Considerando due osservatori in posizioni, λ e λ’, si avrà per lo stesso istante: da cui: e quindi: T=t−λ t − λ = t’ − λ’ ; t’ = t + ∆λ e T = t’ − λ’ t’ = t + (λ’ − λ) (algebrica) la quale consente di passare dal tempo riferito ad un dato meridiano a quello relativo ad un altro dato meridiano. Gode di un certo privilegio il punto vernale γ , che è il ben noto punto di intersezione dell'eclittica con l'equatore celeste, è da questo particolare punto che si contano le ascensioni rette. Essendo un punto pressoché immobile, se si prescinde dalla precessione, può considerarsi come una particolare stella avente sempre l'ascensione retta (a) nulla. II suo angolo orario si chiama tempo sidereo si indica con ts se riferito ad un generico meridiano, con Ts, se riferito al meridiano di Greenwich. Per un astro qualunque risulta sempre: ts = t + α ; t = ts − α In navigazione astronomica è consuetudine usare la coascensione retta, cioè (360° - α), per cui: t = ts + (360°− α) Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 64 Navigazione Stimata – (III) Cosmografia Una volta ottenuto il ts relativo ad un dato istante, sarà facile passare da esso all’angolo orario simultaneo di un astro qualsiasi, conoscendo il valore simultaneo dell’ascensione o coascensione retta (360° - α). - Ora fuso Dall’esame della seguente: λ=t−T risulta che ogni meridiano ha una sua ora particolare che differisce di λ da quella di Greenwich; ciò risulta praticamente inaccettabile dover impiegare un’ora che non ha alcun riferimento con la sua situazione effettiva delle varie località. Per gli usi civili è necessario che gli orologi degli abitanti di uno stesso Paese siano regolati su di un unico meridiano. Per assolvere a questo problema si è suddivisa la Terra in 24 fusi, ciascuno dell’ampiezza di 15° di ∆λ, cioè di 1h , adottando come ora locale ( tf ) l’ora del meridiano centrale del fuso. Il primo, indicato col numero 0, si estende da 7°30’ W a 7°30’ E ed ha come meridiano centrale il meridiano di Greenwich, di longitudine λf = 0h . Da ciò risulta che: Tm = tf – ( ± λf ) ; tf = Tm + ( ± λf ) (algebrica) Il segno (±) dipende dal cardine della longitudine dell’osservatore E o W. La formula precedente, diventa: schema di calcolo : tf = - λf = Tm = + λ ’f = t’f = t - λ = t’ - λ’ tf - λf = t’f - λ’f ..................... del ............. ..................... ..................... del ............. ..................... ..................... del ............. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 65 Navigazione Stimata – (III) Cosmografia Per passare dall’ora media locale di un osservatore a quella fuso di un altro osservatore, si ha: t’f = tm + (λ’f − λ ) Per passare dall’ora media locale di un osservatore a quella fuso dello stesso osservatore, si ha: tf = tm + (λf − λ ) in tal caso la differenza (λf - λ ), algebrica, si chiama Correzione del fuso, e si indica C f . Schema di calcolo : tm = + (λf - λ) = tf = - ................... ± ............... ................... del ............. del ............. λf = ................. - λ = ................. cf = ................. Calcolo dell’ora di arrivo (E.T.A. : Estimated Time of Arrival) Nota la longitudine e l’ora media di locale di partenza, l’intervallo di navigazione e la longitudine di arrivo, per calcolare l’ora media locale di arrivo basta aggiungere l’intervallo di navigazione alle formule già note: t’m = tm + ∆t + (λ’ − λ ) che si può scrivere: t’m = tm − λ + ∆t + λ’ che adottando le ore fuso, si può scrivere: t’f = tf − λf + ∆t + λ’f Schema di calcolo : tmA = − λA = Tm = +∆ t = T’m = +λ B = tmB = - ..................... ..................... ..................... .................... ..................... ..................... ..................... del ............. del ............. del ............. del ............. tfA = − λfA = Tm = +∆ t = T’m = λfB = tfB = ..................... ..................... ..................... ..................... ..................... ..................... ..................... del ............. del ............. del ............. del ............. Calcolo dell’ora di partenza (E.T.D. : Estimated Time of Departure) tmA = tmB − λB − ∆t + λA tmB = − λB = T’m = −∆t = Tm = +λ A = tmA = ..................... ..................... ..................... .................... ..................... ..................... ..................... del ............. del ............. del ............. del ............. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I tfA = tfB − λf B − ∆t + λfA tfB = − λfB = T’m = −∆t = Tm = +λfA = tfA = ..................... ..................... ..................... ..................... ..................... ..................... ..................... del ............. del ............. del ............. del ............. 66 Navigazione Stimata – (III) Cosmografia - Il cronometro marino È un orologio di elevata precisione, costruito e conservato a bordo in modo tale da risentire il meno possibile gli effetti dovuti al moto della nave e all'ambiente marino. Il quadrante è di circa 10 cm e oltre a portare le normali lancette è munito di un indicatore che segna la corda di carica. L'orologio, dotato di una sospensione cardanica, è contenuto in una cassa di legno la quale a sua volta si trova dentro una cassa imbottita chiusa da un vetro dal quale è possibile osservare l'ora. Il cronometro viene caricato con una apposita chiave e quasi sempre dalla stessa persona, non viene mai spostato e mediante orologi mostre o orologi di confronto è possibile prendere l'ora media di Greenwich per lo “stop” delle osservazioni astronomiche. Cronometro meccanico con sospensione cardanica. Strumento fondamentale per la determinazione della longitudine in mare. Nell’angolo della carta nautica è appoggiato l’orologio “mostra” per lo stop orario durante le osservazioni astronomiche all’esterno. Ricordiamo che il cronometro dovrebbe indica l'ora media di Greenwich, ma anche esso, come tutti gli strumenti, non è perfetto e può avanzare o ritardare. Per cui si indica con: Tc il tempo cronometro, cioè l'ora letta al cronometro. Conoscendo la correzione assoluta K, la quale viene determinata facendo il confronto fra l'ora del cronometro e l'ora di Greenwich mediante segnali orari, è possibile determinare l'ora esatta di Greenwich. Tm = Tc + K Poiché il Tc è compreso tra O e 12 ore, il Tm determinato con la formula sopraddetta ha una ambiguità di 12 ore che è possibile eliminare determinando un valore approssimato del Tm conoscendo il tm del crepuscolo di osservazione e la longitudine dell'osservatore, oppure conoscendo il tf di osservazione e la longitudine dell'osservatore. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 67 Navigazione Stimata – (III) Cosmografia Tmapp = tm - (± λ) ; Tmapp = tf - (± λf) L'ora media approssimata di Greenwich va ricavata prima di iniziare qualunque calcolo nel quale viene impiegato il Tc. Mentre il cronometro marino indica l'ora di Greenwich, gli orologi comuni per la vita di bordo e per i turni di guardia sono regolati in navigazione sull'ora del fuso nel quale la nave si trova o dello Stato del porto. Quando si passa da un fuso all'altro, gli orologi vengono spostati di una ora in avanti se si naviga con rotte verso Est, di una ora indietro se si naviga verso Ovest distribuiti 20 minuti per guardia. Cronometro meccanico Hamilton Watch Company Cronometro moderno Naviquartz. Il cronometro meccanico è stato sostituito da quello al quarzo, che conserva l'aspetto tradizionale Linee di separazione delle date Istante per istante, su tutta la Terra vi sono due date differenti tra loro di un giorno. Le località alle quali compete una data, sono separate da quelle alle quali compete l'altra, da due meridiani, uno di essi è mobile ed è quel meridiano in cui i punti hanno in quell'istante il Sole a mezzogiorno, l'altro è fisso, ed è l'antimeridiano di Greenwich. Entrambi vengono detti linee di separazione delle date. Quando si oltrepassa l'antimeridiano di Greenwich con rotte verso Est si diminuisce di 1 giorno la data, se invece si oltrepassa l'antimeridiano di Greenwich con rotte verso Ovest si aumenta di 1 giorno la data. L'antimeridiano di Greenwich è detto anche linea di confusione delle date, perché ai suoi punti compete la doppia data. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 68 Navigazione Stimata – (III) Cosmografia Successione delle date e delle ore ai diversi meridiani Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 69 Navigazione Stimata – (III) Cosmografia Passaggio al meridiano 180° (1) Passaggio al meridiano 180° (2) I crepuscoli Al sorgere e al tramonto del sole, a causa dell'atmosfera, non c'è il passaggio diretto tra il giorno e la notte e viceversa. Si passa dalla notte al giorno in modo graduale, per cui la mattina prima che il sole sorge è già giorno, nel senso che il cielo è già chiaro, e la sera, dopo che il sole tramonta continua ad esserci luce. Questo intervallo di tempo che passa tra il buio della notte e la luce del giorno si chiama crepuscolo mattutino; il crepuscolo serale è invece l'intervallo di tempo che passa tra la luce del giorno e il buio della notte. Al mattino e alla sera si distinguono i seguenti crepuscoli: - Crepuscolo astronomico - Crepuscolo nautico - Crepuscolo civile. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 70 Navigazione Stimata – (III) Cosmografia Il crepuscolo nautico è quello che interessa all’Ufficiale di Navigazione, in quanto durante questo periodo sono contemporaneamente visibili l’orizzonte e gli astri utili alla navigazione astronomica. Esso dura quasi mezz’ora. Le tre tipologie di crepuscolo EFFEMERIDI NAUTICHE Sono dei cataloghi, editi dall'Istituto Idrografico della Marina Militare Italiana dal 1916, che riportano, in funzione della data e dell'ora di Greenwich (UT), la posizione degli astri osservabili a bordo di una nave, per l’anno in corso, impiegabili a fini nautici nella navigazione astronomica; essi sono: 4 pianeti (Venere, Marte Giove e Saturno); Luna e Sole; 66 stelle più luminose (1a e 2a grandezza). Le Effemeridi riportano anche Ts, l'ora siderea (angolo orario del punto gamma), coascensioni rette e declinazioni, il sorgere e il tramonto del Sole e della Luna, l'ora di inizio e fine dei crepuscoli nautici mattinale e serale, l'ora del passaggio in meridiano del Sole e della Luna, più altre informazioni specifiche. Le Effemeridi Nautiche impiegano coordinate che sono: - apparenti, ossia tenendo conto delle variazioni periodiche (aberrazione, polodia, nutazione); - geocentriche, e cioè riferite al centro della Terra; - riferite al centro degli astri; - espresse in funzione dell'ora (e data) di Greenwich. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 71 Navigazione Stimata – (III) Cosmografia I dati dei corpi celesti, sono riportati in due pagine affiancate e si riferiscono a tre giorni consecutivi. Esse sono costituite da un corpo centrale che consiste in un elenco delle coordinate dei pianeti visibili ad occhio nudo (Mercurio escluso), della Luna e del Sole, aggiornate ora per ora. Nella prima colonna, intestata UT (Universal Time ovvero Universal Time Coordinate – UTC) sono riportati i giorni e le ore, 0 a 23, con passo orario 1h per ciascun giorno; seguono, in corrispondenza di ogni ora, gli angoli orari ( T ) e le declinazioni (δ) dei pianeti Venere, Marte, Giove, Saturno. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 72 Navigazione Stimata – (III) Cosmografia A pié pagina per questi pianeti è fornita la variazione oraria media (ν) per l’angolo orario e la variazione oraria (d) per la declinazione. Per la Luna, dotata di moto proprio, fortemente perturbato le variazioni, sono fornite per ogni ora sia per l’angolo orario (ν) che per la declinazione (d); queste variazioni sono riportate a fianco dei valori orari. Sull’ultima colonna della Luna è anche riportata la parallasse equatoriale orizzontale (πeq). Sempre a pié pagina, inoltre, per la Luna sono riportati i valori del semidiametro per i tre giorni. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 73 Navigazione Stimata – (III) Cosmografia Nella seconda pagina sono riportati: l’angolo orario (T) e la declinazione (δ) del Sole; il tempo sidereo e le coordinate equatoriali delle stelle osservabili (quest’ultimi validi per i tre giorni); infine, sul lato destro di questa seconda pagina, sono riportati gli istanti del sorgere e tramonto del Sole e della Luna e gli istanti dell’inizio e fine crepuscolo nautico in funzione della latitudine; Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 74 Navigazione Stimata – (III) Cosmografia in basso, su questa seconda pagina, sono riportate per i tre giorni l’istante del passaggio al meridiano superiore ed inferiore di Greenwich del Sole e della Luna; per la Luna è anche riportata la fase e l’età corrispondente; sempre nella stessa pagina sono riportati gli istanti dei passaggi al meridiano superiore dei pianeti osservabili in astronomia nautica e le coα degli stessi; quest’ultimi dati sono validi per i tre giorni relative alle due pagine prese come riferimento. L'ultima parte delle Effemeridi Nautiche, quella con le pagine colorate, contiene le tabelle per interpolare i dati forniti dal corpo centrale e per apportare le correzioni all'altezza misurata col sestante per la rifrazione, la parallasse, l'altezza sull'orizzonte ed il semidiametro. Per determinare l’angolo orario T e la declinazione δ nell’intervallo espresso in minuti e secondi riferiti all’istante di osservazione considerato Im (Intervallo medio) si ricorre alle pagine di interpolazione. Es: Tm (di osservazione) = 13h22m12s → Tm’ = 13h + Im’ = 22m12s Le tavole di interpolazione, riportate alla fine delle Effemeridi nautiche, note molto spesso come pagine gialle, permettono in modo rapido, di trasformare l’intervallo medio nell’intervallo corrispondente al corpo celeste considerato: Tempo sidereo o Tempo siderale ( Ts ) – trasformazione dell’intervallo medio ( Im) in intervallo sidereo ( Is ); Tempo vero ( Tv) – trasformazione dell’intervallo medio ( Im) in intervallo vero ( Iv); Tempo pianeta ( T.) – trasformazione dell’intervallo medio ( Im) in intervallo pianeta ( I.); Tempo Luna ( T ) – trasformazione dell’intervallo medio ( Im) in intervallo lunare ( I). Nelle stesse tavole di interpolazione è possibile tener conto della variabilità oraria riportata a pié pagina del corpo celeste considerato; infatti, ogni pagina contiene due ore: si entra sulla prima colonna con l’intervallo medio espresso in minuti e secondi; seguono tre colonne: la prima intestata Sole e pianeti, la seconda con γ, la terza Luna. Seguono altre colonne intestate con v/d e pp (parti proporzionali) che permettono di apportare delle variazioni aggiuntive a quelle trovate nelle colonne di trasformazione in funzione delle variazioni orarie riportate a pié pagina per ogni corpo celeste oppure in corrispondenza dell’ora intera per la Luna. Per ogni trasformazione da tempo medio riferito al meridiano di Greenwich ( Tm) contato a partire dal meridiano inferiore si ottengono angoli orari ( Tv, Ts , T., T ) contati tutti dal mezzocielo superiore e le corrispondenti declinazioni dei corpi celesti considerati (δv ,δ.,δ ). Inoltre, se è assegnata la longitudine di un generico osservatore ( λ ), allora è possibile trasformare le osservazioni riferite a Greenwich al meridiano locale assegnato. L’istante di osservazione deve essere sempre accompagnato dalla data di osservazione, perché solo con la data fissata è possibile usare le effemeridi nautiche. Il tempo medio Tm deve essere espresso sempre in ore, minuti e secondi, gli angoli orari trovati e le declinazioni devono essere espressi, per fini nautici, in gradi, primi d’arco e decimi di primo. - Calcolo delle coordinate locali orarie Fissata la data e l’istante di osservazione, per mezzo delle due pagine riportate relative ai giorni 24, 25 e 26 febbraio 1998 e delle tavole di interpolazione si ottengono le seguenti coordinate locali orarie. Si riporta il seguente esempio di calcolo. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 75 Navigazione Stimata – (III) Cosmografia ESEMPIO – Determinare le coordinate locali orarie del Sole, della Luna, del pianeta Giove e dell’astro Sirius per l’istante Tm = 13h44m10s del giorno 25 febbraio 1998, per l’osservatore in posizione φ = 40°20’.5 N ; λ = 15°13’.7 E . Tempo di Osservazione 25 - 2 - 1998 Tm = 13h Im = 44m10s 13h Tm = Im = 44m10s Sole Luna Giove Sirius T’ = 028°02’.7 T’v = 011°43’.9 + Iv = 011°10’.3 + I = 010°39’.7 + pp= - 0’.2 + pp = 7’.5 Tv = 022°54’.0 T = 038°49’.9 + λ = 015°13’.7 E + λ = 015°13’.7 E tv = 038°07’.7 t= 054°03’.6 T’● = 012°58’.2 + I●= 011°10’.3 + pp= 1’.9 T● = 024°10’.4 + λ = 015°13’.7 E t● = 039°24’.1 T’s = 350°11’.3 + Is = 011°12’.1 Ts = 361°23’.4 + λ = 015°13’.7 E ts = 016°37’.1 +coα= 258°43’.8 t = 275°20’.9 δ = 09° 02’.7 S pp = + 0’.7 δ = 09°02’.0 S δ● = 10° 28’.8 S pp = - 0’.1 δ● = 10°28’.7 S δ = 16°42’.1 S δ = 12° 58’.0 S pp = 0’.1 δ = 12°57’.9 S Cominciamo con il Sole: 1) Apriamo le Effemeridi Nautiche alla pagina relativa a questa data, e leggiamo i dati relativi alle 13 UT. L'angolo orario (T) vale 14° 10,3'. Alla fine della colonna che riporta gli angoli orari dei tre giorni è segnato il valore della variazione oraria, v, che nel nostro caso è - 0,3’; 2) Poi andiamo nelle pagine colorate gialle (o celeste) alla pagina relativa ai 44 minuti. Prendiamo in considerazione la riga dei 41 secondi. La prima colonna riguarda il Sole ed i pianeti, la seconda il Tempo Siderale e la terza la Luna. Per il calcolo dell’intervallo medio Iv relativo al Sole utilizziamo ovviamente la prima colonna, che indica 11°10,3'. Questo è il valore che dobbiamo aggiungere all'angolo orario relativo alle ore 13 UT. 3) Ma non è ancora finita. Dopo le prime tre colonne ce ne sono altre tre, con l'intestazione "v/d pp" (parte proporzionale della variazione) che riportano dei valori da 0 a 18 in incrementi di un decimo (sono primi di grado). Avevamo visto che il valore v posto in basso sotto la colonna trigiornaliera degli angoli orari T del Sole era - 0,3. Scorriamo l’elenco v/d fino ad incontrare il valore v = 0’.2 e vediamo il corrispondente valore pp: - 0’,2 (pp prende il segno della v). Quindi il valore dell'angolo orario Tv del Sole relativo alle 13h44m41s del 25/02/1998 è dato da 11°43’,9 + 11°10’,3 0’,2. (se il valore di v fosse stato positivo l'operazione da effettuare sarebbe stata 11°43’,9 + 11°10’,3 + 0’,2). 4) Aggiungendo al Tv la longitudine dell’osservatore troviamo la coordinata tempo dell’astro relativa all’osservatore. 5) Vediamo ora come si calcola la declinazione del Sole per quel giorno alla ora data 13h44m10s: riapriamo le Effemeridi Nautiche alla pagina relativa alla data, e leggiamo i dati relativi alle 13 UT. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 76 Navigazione Stimata – (III) Cosmografia La declinazione δ del Sole vale 09° 02’,7. Alla fine della colonna che riporta le declinazioni δ dei tre giorni è segnato il valore d, che nel nostro caso è d = + 0’,2. 6) Andiamo nella pagina delle interpolazioni relativa ai 44 minuti e questa volta scorriamo l’elenco v/d fino ad incontrare il valore 0’.2 e rileviamo il valore pp corrispondente, pp = 0’.1; (in questo caso il segno è positivo). Allora la declinazione è 09° 02’,7 S + 0’,1 (sarebbe stata 09° 02’,7S + 0’,1 se d fosse stato negativo). 7) Per Giove si opera allo stesso modo. 8) Per la Luna si opera nello stesso modo, solo che i valori v e d vengono forniti ora per ora. 9) Per le stelle dobbiamo prima effettuare il calcolo del relativo Tempo Siderale Ts: alle 13 UT esso vale 350°11’.3. Per il Ts non esistono v e d, quindi si legge il valore da aggiungere direttamente sulla pagina colorata relativa a 44m41s (la colonna da prendere in considerazione è la seconda, quella indicata dal simbolo γ), che vale 11°12’,1. Il Ts allora è 350°11’.3 + 11°12’,1 = 361°23’.4 (001°23’.4). Aggiungendo anche qui la longitudine dell’osservatore troviamo il tempo sidereo relativo all’osservatore ts. Per il calcolo dell'angolo orario di Sirius non dobbiamo fare altro che sommare la coascensione retta (colonna 360° - α ) della stella al Ts; otteniamo quindi 311°52’.5 + 258°47’.5 = t = 210°40’.0. La declinazione viene letta direttamente in corrispondenza di Sirius 16° 42’,3 Sud, nella colonna delle declinazioni delle 66 stelle. Tv = 022°54’.4, T = 038°49’.9, T● = 024°10’.4, sono le coordinate orarie rispettivamente del Sole, della Luna, di Giove rispetto a Greenwich alle ore 13h44m10s del giorno 25/02/1998. tv = 038°07’.7, t = 054°03’.6, t● = 039°24’.1, sono le coordinate orarie rispettivamente del Sole, della Luna e di Giove rispetto all’osservatore posto alla longitudine λ = 015°13’.7 E nel giorno 25/02/1998 alle ore 13h44m10s. Ts = 001°23’.4 - tempo sidereo o arco di equatore contato dal meridiano superiore dell’osservatore posto in Greenwich in senso orario fino al piano meridiano passante per il punto vernale γ - punto dell’equinozio di primavera. ts = 016°37’.1 - tempo sidereo o arco di equatore contato dal meridiano superiore dell’osservatore posto in longitudine λ = 015°13’.7 E in senso orario fino al piano meridiano passante per il punto vernale γ - punto dell’equinozio di primavera t = 275°20’.9 - angolo orario di Sirius rispetto all’osservatore in longitudine λ = 015°13’.7 E . Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 77 Navigazione Stimata – (III) Cosmografia MISURA DELLE ALTEZZE – IL SESTANTE Lo strumento principale della navigazione astronomica è il sestante, esso ci permette di misurare le altezze degli astri, cioè l'angolo compreso fra l'astro e l'orizzonte dell'osservatore. Per capirne bene il suo funzionamento bisogna conoscere il principio su cui si basa: “Quando un raggio ottico subisce due riflessioni sullo stesso piano, l'angolo formato tra il primo raggio incidente e il secondo riflesso è uguale al doppio dell'angolo formato tra le superfici riflettenti”. Principio ottico del sestante Il raggio ottico, proveniente dall'astro, incide sullo specchio S secondo l'angolo α, viene riflesso, secondo lo stesso angolo ed va ad incidere sullo specchio s secondo l'angolo β; a sua volta lo specchio s lo riflette e lo invia all'occhio dell'osservatore O. Ciò che noi vogliamo dimostrare è che l'angolo AOs, indicato con ω, è doppio dell'angolo Ses, indicato con δ. Nel triangolo SsO, 2α risulta essere: 2α = 2β + ω e nel triangolo SsB, α risulta essere: α=β+δ Ciò perché in un triangolo un angolo esterno risulta essere uguale alla somma degli angoli interni non adiacenti ad esso; inoltre l'angolo sES è uguale all'angolo sBS perché angoli formati tra rette a due a due perpendicolari. Dall'espressioni sopra riportate si ricava che: cioè: ω = 2(α - β) δ =α-β ω =2δ Quindi se il raggio SsO è puntato verso l'orizzonte, l'angolo ω è l'altezza dell'astro, mentre l'angolo β formato tra i due specchi è leggibile nel lembo del sestante, graduato in modo doppio. Lo specchio S è orientabile con l'alidada, ed è completamente amalgamato, mentre lo specchio C è fisso ed è metà amalgamato e metà trasparente; essi sono paralleli fra di loro quando nella graduazione del lembo del sestante si legge lo zero. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 78 Navigazione Stimata – (III) Cosmografia Il sestante Ogni sestante in sede di fabbricazione viene controllato ed attestata la sua precisione mediante un certificato, nel quale viene indicato l'eventuale errore istrumentale, del quale va tenuto conto. La correzione istrumentale si determina sperimentalmente con misure accurate, mediante strumenti di precisione tipo un teodolite, tali misure vengono fatte di 10° in 10° e se ne ricava una tabella la quale fornisce in funzione dell’angolo misurato con il sestante la correzione istrumentale. Lettura: 45°59’.6 Prima di effettuare una misura bisogna verificare che gli specchi siano perfettamente paralleli fra loro. Questo lo si verifica ponendo l’alidada sullo zero del lembo graduato e traguardare l’orizzonte; se l’orizzonte è continuo, significa che vi è un errore. Questo errore lo si può calcolare ancora meglio facendo uso del Sole: lo si osserva e con la vite micrometrica si porta il lembo superiore del Sole riflesso a collimare il lembo inferiore del Sole diretto, ottenendo un valore letto sulla vite micrometrica; si porta il lembo inferiore del Sole riflesso a collimare con il lembo superiore del Sole diretto, ottenendo un valore il quale viene sottratto a 60’. Dalla semidifferenza tra le due letture si ottiene il valore dell’errore; indicheremo con γc la correzione da apportare all’altezza istrumentale (misurata), che sarà di segno contrario dell’errore: - lettura a sinistra dello zero = 32’.5 lettura a destra dello zero = 29’.2 2γ = 3’.2 γ = 1’.6 ho = hi + ci + γc Appunti di Scienze della Navigazione e Tecnologie Navali 2- I γc = - 1’.6 79 Navigazione Stimata – (III) Cosmografia - Correzione delle altezze L'altezza misurata al sestante e corretta con la correzione d'indice γc è l'altezza (misurata) osservata ho. Essa è la misura verticale formata fra il raggio ottico, che dall'occhio dell'osservatore va all'orizzonte marino e il raggio di luce che proviene dall'astro. Il raggio luminoso proveniente dall'astro, nell'attraversare l'atmosfera, subisce successive rifrazioni incurvandosi. L'astro, quindi, viene visto un po' più alto. L'angolo compreso tra la direzione ritratta e quella che si avrebbe in assenza di atmosfera si chiama rifrazione atmosferica r . Riepilogo delle correzioni da apportarsi alle altezze istrumentali La rifrazione atmosferica dipende dall'altezza dell’astro; essa è massima quando l’astro è prossimo all’orizzonte, e nulla quando l’astro è allo zenit. La rifrazione dipende da fattori meteorologici e viene determinata in modo empirico, perciò è sconsigliato misurare astri prossimi all'orizzonte (10° ÷ 15°). Anche il raggio ottico che dall'occhio dell'osservatore va verso l'orizzonte marino, per la presenza dell'atmosfera, si incurva seguendo una traiettoria detta curva di rifrazione geodetica. In assenza di atmosfera il raggio ottico sarebbe una retta e per effetto dell'elevazione dell'occhio dell'osservatore l'orizzonte sarebbe quello geometrico. Per effetto della rifrazione geodetica l'orizzonte diventa più "ampio" ed è quello marino. Il piano orizzontale passante per l'occhio dell'osservatore è l'orizzonte apparente, il piano orizzontale passante per il centro della terra è detto orizzonte astronomico. L'angolo verticale compreso tra l'orizzonte apparente e la direzione secondo la quale è visto l'orizzonte marino è detta depressione apparente. Essa varia con l'elevazione dell'occhio dell'osservatore e dipende anche dalle condizioni atmosferiche. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 80 Navigazione Stimata – (III) Cosmografia L'angolo compreso tra l'orizzonte apparente e la direzione secondo la quale si vedrebbe l'orizzonte geometrico è detta depressione vera. Sottraendo all'altezza rifratta hr , la rifrazione astronomica r si ottiene l'altezza apparente ha . ha = ho - i - r Se l'astro osservato è una stella oppure un pianeta lontano (Giove, Saturno), le direzioni uscenti dall'osservatore e dal centro della terra e dirette verso l'alto possiamo ritenerle parallele e cioè considerare uguali l'altezza apparente con l'altezza vera hv. Nel caso che l'astro osservato è un pianeta vicino (Venere, Marte), oppure il Sole o la Luna, queste due altezze non sono uguali, la loro differenza è detta parallasse diurna π , che è l’angolo secondo il quale dall’astro è visibile il semidiametro della Terra, quindi l’altezza è uguale all’altezza aumentata della parallasse: hv = ha + π Infine è da tenere presente che il Sole e la Luna sono astri di dimensioni non puntiformi e nelle misure delle altezze si può osservare il lembo inferiore oppure quello superiore, mentre per i calcoli bisogna riferirsi sempre al centro dell’astro. L’angolo secondo il quale l’osservatore vede il semidiametro del Sole σ va sommato o sottratto all’altezza apparente a seconda che si è osservato il lembo inferiore o superiore. - Quadro riassuntivo hv = hi + c + γc - i - r hv ● = h i + c + γ c - i - r + π hv = hi + c + γc - i - r + π ± σ hv = hi + c + γc - i - r + π ± σ Altezza vera (per le stelle) Altezza vera per Pianeti lontani Altezza vera Sole Altezza vera Luna Le Effemeridi Nautiche consentono di correggere le altezze degli astri in modo facile e veloce, aggiungendo all’altezza osservata hO due o tre correzioni e sottraendo dal risultato il valore di 1° per ottenere l’altezza vera hv. hv = hi + ci + γc + C1 + C2 - 1° hv● = hi + ci + γc + C1 + C2 + C3 - 1° hv = hi + ci + γc + C1 + C2 + C3 - 1° hv = hi + ci + γc + C1 + C2 + C3 - 1° - Stelle: C1 = (- i + 20’); C2 = (- r + 40’) Pianeti: C1 = (- i + 20’); C2 = (- r + 40’); C3 = π Sole: C1 = (- i + 20’); C2 = (- r + 16’); C3 = σ +π +24’ Luna: C1 = (- i + 20’); C2 = (- r + 20’); C3 = σ +π +20’ Schema di calcolo hi = ………………... ci = ………………. γc = ………………. ho = ………………... C1 = ………………... C2 = ………………... hv+ 1° = …………….. hv= ………………… hi● = ………………... hi = ………………... hi = ………………... ci = ………………. ci = ………………. ci = ………………. γc = ………………. γc = ………………. γc = ………………. ho● = ………………... ho = ………………... ho = ………………... C1 = ………………... C1 = ………………... C1 = ………………... C2 = ………………... C2 = ………………... C2 = ………………... C3 = ………………... C3 = ………………... C3 = ………………... hv●+ 1° = ……………... hv + 1° = ……………. hv + 1° = ……………... hv● = ……………... hv = ……………... hv = ……………... Giove-Saturno, C3=0 σ =0 π =0 C3 = π Nota. La correzione istrumentale ci è generalmente nulla per i sestanti di marca, altrimenti bisognerà addizionarla. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 81 Navigazione Stimata – (III) Cosmografia DETERMINAZIONE DELLA LATITUDINE Un astro nel suo moto apparente diurno raggiunge la massima altezza quando passa al meridiano superiore dell’osservatore; in questo punto è possibile determinare la latitudine dell’osservatore conoscendo l’altezza osservata ed opportunamente corretta in altezza vera. Dalla figura risulta che: da cui: MsCs = δ CsZ = z MsZ = ϕ MsZ = MsCs + CsZ dalla quale risulta che: ϕ=z+δ algebrica dove z risulta ( + ) quando l’astro è osservato a Sud, risulta ( - ) quando l’astro è osservato a Nord; la δ è positiva se Nord, negativa ( - ) se Sud. Poiché la distanza zenitale z si determina conoscendo l’altezza dell’astro, è possibile determinare la latitudine vera di un osservatore determinandone l’altezza vera hv : ϕ v = (90° - h v) + δ da cui: ϕv = zv + δ La declinazione δ si ricava dalle Effemeridi Nautiche in funzione del Tm dell’osservazione. Determinazione della latitudine con la Polare Un osservatore che si trova nell’emisfero nord ha la possibilità di vedere materializzato il suo polo elevato. Molto vicino al Polo Nord celeste, infatti, si trova una stella detta appunto Polare; essa è la principale stella della costellazione dell’Orsa Minore. Poiché essa è molto vicina al Polo, determinandone l’altezza si può determinare la latitudine dell’osservatore. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 82 Navigazione Stimata – (III) Cosmografia MsZ = ϕ ZPn = 90° - ϕ ZN = 90° NPn = ϕ Cioè l’altezza del Polo elevato è uguale alla latitudine dell’osservatore. Le Effemeridi nautiche consentono di trasformare l’altezza vera hv in latitudine apportandovi tre correzioni nel seguente modo: ϕ v = h v + c1 + c2 + c3 – 1° Le Effemeridi Nautiche consentono anche di calcolare l’angolo azimutale che, poiché la stella si trova molto vicina al Polo Nord celeste, è prossimo a 0°. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 83 Navigazione Stimata – (III) Cosmografia IDENTIFICAZIONE DEGLI ASTRI Il riconoscimento di un astro generalmente avviene a vista, in quanto le stelle fanno parte di Costellazioni note. Con l’ausilio delle carte celesti l’identificazione di una stella incognita viene effettuato col metodo degli allineamenti. Oggigiorno si possono utilizzare anche software di astronomia. Identificazione tramite il calcolo Il problema dell’identificazione con il calcolo ricorre frequentemente quando si è costretti ad osservare un astro non noto e il cielo è prevalentemente nuvoloso. È necessario associare all’altezza misurata col sestante ed al Tm di osservazione anche l’azimut della stella; quest’ultimo misurato alla ripetitrice della girobussola oppure al cerchio azimutale montato sulla bussola magnetica normale. Nel computo entrano, inoltre, anche le coordinate stimate della nave. I calcoli devono condurre a determinare il nome della stella, individuandone le sue coordinate uranografiche equatoriali coα e δ (coascensione retta e declinazione). Il problema del riconoscimento si risolve con la trasformazione di coordinate altazimutali note (altezza h, azimut a) in coordinate orarie (declinazione δ, angolo orario t) inizialmente incognite. Si risolve il triangolo sferico di posizione, applicando il Teorema di Eulero per determinare la declinazione approssimata δappr e il Teorema delle cotangenti per determinare l’anglo al polo P, da cui passare all’angolo orario approssimato tappr dell’astro. Procedimento: - con le Effemeridi, conoscendo il valore di Tm di osservazione dell’astro, si calcola il tempo sidereo locale ts , con cui si calcolerà il valore approssimato della coascensione retta coα = tappr – ts . Riepilogando: dati l’azimut misurato a → Z e l’altezza h Tm = T’s = ………………. + I s = ………………. Ts = ………………. + λs = ………………. ts = ………………. . coordinate esatte . dell’astro ( Eff. Naut.) . + coα = ……………… (coα , δ ) t = ……………… P = ……………… h m s data senδappr = senϕ sen h + cosϕ cos h cos Z cot P = cos ϕ ⋅ tanh senϕ − senZ tan Z P appr → t appr Effemeridi nautiche Nome dell’astro cot Z s = ← coααppr = tappr - ts δappr cos ϕ ⋅ tan δ senϕ − ; Z = N(S) …… E(W) senP tan P Al fine di tracciare la retta d’altezza, per determinare le coordinate del Punto nave astronomico si dovrà calcolare l’altezza stimata hs e l’azimut stimato as: sen hs = senϕ sen δ + cosϕ cos δ cos P Appunti di Scienze della Navigazione e Tecnologie Navali 2- I Zs → as 84 Navigazione Stimata – (III) Cosmografia Identificazione con lo Starfinder and identifier È l’astroscopio più utilizzato dall’Ufficiale di Navigazione. Su un disco bianco sono segnate, sulle due facce, le stelle più luminose osservabili nei due Emisferi. Su una faccia il centro del disco è la rappresentazione del Polo celeste Nord, sull’altra il centro è la rappresentazione del Polo celeste Sud. È una rappresentazione equatoriale equidistante: ci sono l’equatore, con un circolo, e le stelle. La proprietà dell’equidistanza, in scala di riduzione, è lungo i meridiani (non disegnati), la cui graduazione, da 0° a 360°, è sulla periferia del disco; si tratta della graduazione in ascensione retta (α ). Data l’equidistanza dei paralleli celesti (non disegnati), è facile segnare a mano, con la matita, le posizioni dei pianeti osservabili, per l’epoca attuale. Su altri nove dischi trasparenti riferiti ai valori delle ϕ dell’osservatore (5°, 15°, 25°, 35°, 45°, 55°, 65°, 75°, 85° N - S), sono rappresentati i verticali e gli almicantarat di 5° in 5°. Lo zenit è contraddistinto da una crocetta. Il centro del disco, sul verticale dell’osservatore, è il Polo celeste, elevato rispetto all’orizzonte (almicantarat 0°) del valore di ϕ . In corrispondenza del meridiano superiore dell’osservatore vi è una freccia. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 85 Navigazione Stimata – (III) Cosmografia - Impiego dello strumento 1. si sceglie il disco trasparente più vicino alla propria latitudine; 2. si sovrappone il polo del disco trasparente a quello omonimo del disco bianco delle stelle; 3. si ruota il disco trasparente fino a portare la freccia del meridiano superiore in corrispondenza del valore di ts (tempo sidereo locale) letto sulla graduazione periferica del disco bianco; 4. tramite le apposite graduazioni segnate sui verticali e sugli almicantarat si potranno leggere h, a dell’astro che viene così identificato sul disco bianco. CONTROLLO DELLE BUSSOLE. DETERMINAZIONE DELL’AZIMUT DEGLI ASTRI È compito fondamentale dell’Ufficiale di Navigazione controllare il funzionamento delle bussole di bordo, ossia conoscere l’angolo tra il Nord geografico, detto anche Nord vero, e il Nord indicato dalla bussola (Nb o Ngb). Tale angolo è denominato: 1. variazione magnetica : V = d + δ , della bussola magnetica (δ = V - d ); 2. correzione giro: cgb , talvolta chiamata β o δg , della girobussola. Questi angoli sono positivi quando il Nord della bussola è sulla destra del Nord vero; sono negativi quando il Nord bussola è sulla sinistra del Nord vero. - Determinazione dell’azimut vero con il calcolo Le determinazione dell’azimut degli astri servono, oltre che per il tracciamento delle rette d’altezza, per eseguire il controllo delle bussole. Il calcolo dell’azimut in funzione dell’ora si esegue partendo dai seguenti elementi noti: - latitudine e longitudine stimate (o vere) - istante di osservazione Tc - δ e coα dell’astro. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 86 Navigazione Stimata – (III) Cosmografia Dall’istante di osservazione si passa all’angolo al polo P dell’astro; poiché ϕ e δ sono note, si è in grado di calcolare l’azimut dell’astro per mezzo delle formula delle cotangenti: cot Z s = cos ϕ ⋅ tan δ senϕ − senP tan P Zs → as Z = N(S) …… E(W) Dall’angolo azimutale si passa all’azimut, e quindi: V = av – ab oppure cgb = av - agb (algebriche) Esempio Al mattino del 03/01/2013, da una nave in navigazione dell’atlantico con Rv = 130°, V = 16 nodi, dal punto ϕ = 12°30’ S ; λ = 30°22’ W, si osserva alla GB (girobussola) il Sole nell’istante Tm = 08h02m00s; agb = 111°,5 . Calcolare la correzione giro (cgb). Alle Tm = 08h02m00s del 03/01/2013 Tv = 299°36’.8 + λ = 30° 22’.0 W tv = 269°14’.8 → δ = 22°47'.4 S PE = 269°14’.8 cos ϕ ⋅ tan δ senϕ 0,976296 ⋅ 0,420155 0,2164396 − ; cot Z s = − = 0,410232 + 0,0028459 senP tan P 0.999913 76,05196 cot Z s = 0,413077 ; Zs = S 67°,4 E → as =112°,4 cot Z s = as = 112°,4 - agb = 111°,5 cgb = + 0°,9 - Azimut al sorgere e al tramonto del sole (Amplitudine) È l’occasione più favorevole per il controllo delle bussole; metodo rapido e preciso in quanto il lembo (inferiore o superiore) del Sole è prossimo all’orizzonte. Quando il centro del Sole è sull’orizzonte astronomico (S”), l’arco NS” è l’azimut vero (av). Il triangolo di posizione (Z-PCN-S”) è rettilatero sul lato z perché h = 0°. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 87 Navigazione Stimata – (III) Cosmografia L’arco E-S”, Amplitudine ortiva (Ampl = 90° - Z) si calcola con il teorema di Nepero: senδ senAmpl = cosϕ Generalmente si osserva l’azimut (agb o ab) del lembo superiore del Sole nell’istante in cui spunta sul mare (al sorgere) o sta per tramontare; in tale istante il centro del Sole è sotto l’orizzonte astronomico di circa 55’ (HS’ = - 55’.4 per una elevazione dell’occhio dell’osservatore dal mare e = 5 metri). L’arco S”H rappresenta la correzione C, algebrica: 0°,9 ⋅ senϕ C= cos 2 ϕ − sen 2δ Dall’amplitudine vera (centro Sole) si passa all’amplitudine rispetto all’orizzonte marino: Ampl ⊕ = Ampl + C e da questa all’azimut vero: av ⊕ = 90° ± Ampl ⊕ av ⊕ = 270° ± Ampl ⊕ Esempio Al tramonto del giorno 19/03/2013, dal punto ϕ = 43°30’ N , λ = 008°40’ E, si osserva alla bussola magnetica il Sole (lembo superiore) ab = 274°. La declinazione magnetica d = 1° W. Calcolare la deviazione δ. tmTR= 18h14m 21/03/13 -λ = 35m E Tm = 17h39m 21/03 δ = 00°30’.4 N Tavole Nautiche N° 17 av ⊕ = 270° + Ampl ⊕ - Ampl = W 0°.7 N + C = + 0°.7 oppure: Ampl ⊕ = W 1°.4 N senAmpl = av ⊕ = 271°.4 - ab ⊕ = 274°.0 V = - 2°.6 - d = 1° W δ = - 1°.6 senAmpl= 0,0121895 Ampl= 0°.7 senδ 0,008842 = cosϕ 0,725374 Azimut con la Stella Polare Considerando il triangolo di posizione Z-Pcn-A (Polare) e applicando il teorema dei seni, si ha: cos δ senZ = − sen(t s + coα ) cos ϕ (perché h ≅ ϕ e quindi sen z = cos h ≅ cos ϕ; mentre PW = t o 360° - t; t = ts + coα). L’angolo azimutale Z negativo è sinonimo di Ovest (W); se invece risulta positivo, Z è Est. Si passa, poi, da Z ad av, con le relazioni note: av = ZE Appunti di Scienze della Navigazione e Tecnologie Navali 2- I av = 360° - ZW 88 Navigazione Stimata – (III) Cosmografia Stella Polare: α Ursae Minoris, la stella osservabile più vicina al Polo celeste nord L’azimut di osservazione (agb o ab) deve essere collegato il Tc di osservazione per calcolare il tempo sidereo ts e la ϕ della nave. Le Effemeridi Nautiche riportano una Tavola per la determinazione rapida di Z in funzione di ts, argomento orizzontale, e di ϕ o h (h ≅ ϕ), argomento verticale. Esempio Dal punto ϕ = 43°30’ N , λ = 008°40’ E, si osserva la Polare nell’istante Tm = 23h30m del 20/03/2013 alla ripetitrice girobussola agb = 0°.2 Calcolare la deviazione cgb. Alle Tm = 23h30m00s del 20/03/2013 Ts = 171°09’.4 + λ = 08° 40’.0 E t s = 179°49’.4 Dalla Tavola della Polare (con h ≅ ϕ), si ricava Z = N 00°.6 W - → av = 359°.4 - agb = - 00°.2 cgb = - 0°.8 Controllo simultaneo delle bussole Dopo il controllo di una bussola, si può fare il controllo di altre bussole di bordo: 1. Pgb : prora girobussola 2. PbN : prora bussola della magnetica normale (standard compass) 3. PbR : prora bussola della magnetica di governo o di rotta. Dopo aver corretto la prora: Pv = Pgb + cgb , la variazione VN = Pv – PbN e VR = Pv – PbR , da cui : δN = VN – d δR = VR – d Le correzioni della Girobussola e le deviazioni δN-R delle bussole magnetiche (Normale e di Rotta) vengono annotate nel giornale di navigazione e di esse si dovrà tenere conto nei problemi di conversione e correzione delle prore e rilevamenti . Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 89 Navigazione Stimata – (III) Cosmografia APPENDICE 1 L’UNIVERSO E IL SISTEMA SOLARE Il Sole II Sole è una stella media della Via Lattea che emette radiazioni, effetto di reazioni termonucleari nel suo interno che trasformano Idrogeno in Elio. La sua temperatura superficiale è di circa 6000°C mentre si stima che nella zona più interna essa raggiunga i 14 milioni di °C e la pressione sia di circa 17 miliardi di atmosfere. Ha un diametro di 1.392.000 Km ed è visto dalla Terra sotto un angolo di circa 32’. La sua massa è 333.000 volte quella terrestre ma la densità è di soli 1,41 g/cm3 con un'accelerazione di gravità alla superficie di 274 m/s2. Il Sole ruota su se stesso con diverse velocità angolari ed il suo equatore e inclinato di circa 7° sull'eclittica. Il Sole compie anche un movimento di traslazione nello spazio, assieme ai suoi pianeti ed ai relativi satelliti, verso la stella Vega della Costellazione della Lira (α ), alla velocità di 20 Km/s. I Pianeti Appartengono al sistema solare 9 pianeti con i loro satelliti, gli asteroidi situati nella fascia tra Marte e Giove, le comete che sono formate da polvere, ghiaccio e nubi di gas e descrivono orbite ellittiche molto allungate. Esse, per la maggior parte del periodo di rivoluzione, si trovano lontane dal Sole. Tra i pianeti, quelli visibili dalla Terra ad occhio nudo ed utilizzati nella navigazione sono Venere, Marte, Giove e Saturno: Venere è la più splendente e a volte è osservabile anche di giorno. Nello spazio interplanetario esistono ancora dei frammenti di materia: le meteoriti e le polveri cosmiche. Quando le meteoriti vengono catturate dal campo gravitazionale della Terra, entrando nell’atmosfera, per attrito, si surriscaldano e danno luogo al fenomeno della stelle cadenti. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 90 Navigazione Stimata – (III) Cosmografia Al sistema solare appartengono numerosissimi corpi celesti. I maggiori per dimensioni sono i nove pianeti, che percorrono grandi orbite concentriche attorno al Sole. Oltre ai pianeti, vi sono i satelliti; di essi se ne conoscono 32. Poi vi sono innumerevoli pianetini, sparsi lungo un’orbita compresa tra saturno e Urano. Infine vi sono le comete che provengono dall’immensità dello spazio e compaiono in vicinanza del Sole a distanza di decenni. Pianeti Diametro equat. (Km) Massa rif. alla Terra Distanza dal Sole, UA Eccentricità orbita Inclinazione orbita Grandezza apparente Densità media, g/cm3 Rivoluzione siderea Rivoluzione Sinodica Velocità su orbita, Km/s Satelliti (numero) Mercurio Venere Terra Marte Giove Saturno Urano Nettuno Plutone 4’484 12’400 12’756 6’780 143’600 120’500 53’400 49’500 13’000 0,06 0,82 1 0,11 318 95 14 17 0,39 0,72 1 1,52 5,20 9,54 19,18 30,11 39,58 0,206 0,007 0,017 0,093 0,048 0,056 0,047 0,009 0,0247 7° 3°24’ 0° 1°51’ 1°19’ 2°29’ 0°46’ 1°47’ 17°06’ 0,1 - 4,1 -- -1,8 -2,3 0,5 5,8 7,6 14,5 3,8 4,9 5,5 4,0 1,3 0,7 1,3 1,6 87d,97 224d,70 365d,26 11a,862 29a,457 84a,015 115d9 583d,9 -- 779d,9 98d,9 378d,1 369d,7 367d,5 366d,7 47,8 35,0 29,8 24,1 13,1 9,6 6,8 5,4 4,7 -- -- 1 2 12 10 5 2 ? 1a,881 164a,8 249a,7 Elementi relativi ai Pianeti del sistema solare Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 91 Navigazione Stimata – (III) Cosmografia Le leggi di Keplero. Newton Fin da l XV secolo lo studio dell’Astronomia si basava sul sistema Tolemaico o geocentrico, descritto nell’Almagesto, secondo cui la Terra era al centro dell’Universo ed intorno ad essa ruotavano i corpi celesti (Sole, pianeti, ecc.). Copernico, per spiegare alcuni fenomeni, propose il sistema eliocentrico che inizialmente fu accolto con un certo scetticismo. Keplero, utilizzando le osservazioni fatte dal suo maestro, Tycho Brahe, enunciò le leggi con cui i pianeti si muovono intorno al Sole. Esse sono: - Prima Legge: Le orbite dei pianeti intorno al Sole sono delle ellissi di cui il Sole occupa uno dei fuochi. Orbita ellittica di un pianeta attorno al Sole. Il pianeta passa dal punto più vivino al Sole (perielio), al punto più lontano (afelio). Rispetto al Sole i pianeti descrivono delle orbite piane; in pratica tutte le orbite dei pianeti sono poco inclinate tra loro. - Seconda Legge: Il raggio vettore che congiunge il Sole con un pianeta descrive aree uguali in tempi uguali. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 92 Navigazione Stimata – (III) Cosmografia Una conseguenza della seconda legge di Keplero, detta anche legge delle aree, è che al perielio il pianeta è più veloce, mentre all’afelio la sua velocità è minima. - Terza Legge: Il rapporto tra i quadrati dei periodi di rivoluzione è uguale al rapporto tra i cubi dei semiassi maggiori delle orbite, ossia T12 a12 = . T22 a22 Conseguenza della terza legge di Keplero è che i pianeti più lontani dal Sole girano più lentamente come si può desumere discutendo le formule relative. - Legge di gravitazione universale (di Newton): La forza che sollecita un pianeta a girare intorno al Sole (diretta verso il Sole) è direttamente proporzionale al prodotto delle masse dei due corpi ed è inversamente proporzionale al quadrato della loro distanza, ossia F =G⋅ M ⋅m d2 in cui, M è la massa del Sole, m è la massa del pianeta, d la distanza reciproca, G costante universale di gravitazione (6,672·10 -11 New⋅ m ). 2 Kg 2 In virtù della sua legge di gravitazione universale, Newton ha dato un’interpretazione dinamica alle leggi II e III di Keplero: quanto più il pianeta è vicino, tanto maggiore è conseguentemente la forza di attrazione e, quindi, tanto maggiore è la velocità. - Le stagioni astronomiche Astronomicamente le stagioni sono comprese tra un equinozio e un solstizio e tra un solstizio e un equinozio. Nel nostro emisfero, così si succedono: 1) la primavera, nel periodo che la Terra impiega per spostarsi dalla posizione di equinozio del 21 marzo alla posizione di solstizio del 21 giugno; essa ha la durata di 92 giorni e 21 ore; Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 93 Navigazione Stimata – (III) Cosmografia Il moto di rivoluzione e le diverse condizioni di insolazione della Terra (linea degli apsidi, dei solstizi: giugno/dicembre e degli equinozi: marzo e settembre). 2) l’estate, nel periodo che la Terra impiega per spostarsi dalla posizione di solstizio del 21 giugno alla posizione di equinozio del 23 settembre; essa ha la durata di circa 93 giorni e 14 ore; 3) l’autunno, nel periodo che la Terra impiega per spostarsi dalla posizione di equinozio del 23 settembre alla posizione di solstizio del 22 dicembre; essa ha la durata di circa 89 giorni e 18 ore; 4) l’inverno, infine, nel periodo che la Terra impiega per spostarsi dalla posizione di solstizio del 22 dicembre alla posizione di equinozio del 21 marzo; essa ha la durata di circa 89 giorni e 1 ora. La Luna - I movimenti della Luna La Luna compie tre movimenti: 1) di rotazione, intorno al proprio asse 2) di rivoluzione, intorno alla Terra 3) di traslazione, insieme alla Terra, intorno al Sole. Il moto di rotazione si effettua intorno all’asse lunare in un tempo uguale a quello di rivoluzione attorno alla Terra; esso di compie nello stesso senso della rotazione terrestre (da ovest verso est, cioè in senso antiorario per un osservatore posto allo zenit del Polo nord terrestre) ed alla velocità angolare di circa 13° nelle 24 ore in media. L’identità dei tempi di rotazione e di rivoluzione fa sì che il satellite ci volga sempre la stessa faccia. Il moto di rivoluzione è complicato da quello di traslazione del sistema Terra-Luna intorno al Sole e si compie, se riferito alle stelle, in 27 giorni, 7 ore e 43 minuti (mese sidereo), con riferimento all’allineamento Terra-Sole esso dura invece 29 giorni, 12 ore e 44 minuti (mese sinodico, dal greco congiunzione). Il motivo di questa maggiore durata è legato allo spostamento della Terra rispetto al Sole nel periodo di un mese, per cui la Luna, per presentarsi nella stessa posizione, deve percorrere un tratto supplementare di cammino. La luna, mentre ruota intorno alla Terra, si sposta anche insieme a questa attorno al Sole, alla stessa velocità del nostro pianeta; è animata cioè da un “moto di traslazione”. Ne deriva come risultato una combinazione di movimenti che le fanno percorrere una traiettoria di forma particolare, serpentiforme, detta epicicloide. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 94 Navigazione Stimata – (III) Cosmografia Epicicloide - E’ l’orbita reale descritta dalla Luna in seguito alla combinazione dei due moti di rotazione e di rivoluzione. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 95 Navigazione Stimata – (III) Cosmografia Rivoluzione siderea (mese sidereo) e rivoluzione sinodica (mese sinodico). Quando la Luna (L) ha compiuto una intera rivoluzione attorno alla Terra (e ha perciò ripreso l’identica posizione iniziale rispetto ad una data stella), la Terra, percorrendo a sua volta un tratto della sua orbita (circa 1/12 della stessa), si è spostata da T in T’. Per riassumere la posizione iniziale rispetto al Sole, la Luna dovrà ancora ruotare per circa due giorni, spostandosi da L’ in L”. Va inoltre ricordato che al movimento di rivoluzione è anche dovuto il ritardo di circa 50 minuti che si osserva, da una sera all’altra, nel sorgere della Luna e nella culminazione. Quando infatti la Terra ha compiuto una intera rotazione su sé stessa, dandoci l’illusione che sia stato il nostro satellite a compiere una rivoluzione in senso contrario, la Luna si è realmente spostata nel cielo, ma da Ovest ad Est. La Terra deve perciò ruotare ancora per 50 minuti affinché il suo satellite possa rispuntare all’orizzonte del punto considerato, o culminare sul meridiano relativo. La Luna culmina su un meridiano - Mentre la Terra compie una rotazione da Ovest a Est, la Luna compie un moto apparente in senso contrario. La Luna si è però, nel frattempo, realmente spostata verso Est. Perciò la Terra deve ruotare ancora 50 minuti prima che la Luna possa culminare di nuovo sullo stesso meridiano. - Le fasi lunari Nel suo moto di rivoluzione intorno alla Terra, la Luna ci appare diversamente illuminata dal Sole. Nel corso del mese sinodico, si può vederla completamente illuminata, affatto illuminata o parzialmente investita dai raggi solari, a seconda che essa si trovi all’esterno della congiungente Terra-Sole, all’interno della stessa (cioè tra la Terra ed il Sole), oppure in posizioni intermedie. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 96 Navigazione Stimata – (III) Cosmografia Si possono perciò distinguere 4 fasi lunari principali, separate tra di loro da un intervallo di tempo di 7 giorni, 9 ore e 11 minuti (durata del mese sinodico divisa per quattro) e determinate appunto dalle posizioni reciproche dei tre corpi celesti. Quando la Luna si trova tra la Terra ed il Sole, ossia in posizione di congiunzione, volge verso la Terra la sua metà oscura, perciò non è visibile. Questa fase si chiama novilunio o Luna nuova. Dopo ¼ del suo giro di rivoluzione, la Luna forma con la Terra ed il Sole un angolo retto, ossia si trova in posizione di quadratura e non vediamo una metà del suo emisfero illuminato: fase di primo quarto. Proseguendo nella sua rivoluzione, essa viene quindi a trovarsi, rispetto alla Terra, dalla parte opposta a quella del Sole, ossia in posizione di opposizione: Si ha allora la fase di plenilunio o Luna piena, durante la quale dalla Terra è visibile tutto l’emisfero lunare illuminato dal Sole. Successivamente il nostro satellite si ripresenta nella posizione di quadratura e ci mostra di nuovo una metà del suo emisfero illuminato: è la fase di ultimo quarto. Le posizioni di novilunio e di plenilunio sono dette sizigie (dal greco: syzygía - συζυγíα - unione o congiunzione). Le fasi lunari - Durante la sua rivoluzione attorno alla Terra le posizioni relative della Luna, della Terra e del Sole variano determinando le diverse “fasi lunari”. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 97 Navigazione Stimata – (III) Cosmografia Variazione delle coordinate degli astri Per effetto del moto annuo della Terra si hanno delle variazioni delle coordinate degli astri. - Parallasse annua La Terra, nel descrivere la sua orbita intorno al Sole, si sposta nello spazio per cui la stella S, vista dalla Terra T1, viene proiettata sulla Sfera Celeste nella direzione S1, mentre dalla posizione T2 è vista in S2. L’angolo p sotto cui dall’astro è visto il semidiametro maggiore dell’orbita terrestre è la parallasse annua, che rappresenta la variazione di direzione della stella sulla Sfera Celeste, cioè rispetto alle stelle lontanissime. Si ha: senp = a d La parallasse delle stelle è sempre molto piccola: Proxima Centauri, la stella più vicina alla Terra ha una parallasse inferiore ad 1 secondo d’arco (0”,762). Parallasse annua delle stelle La distanza alla quale la parallasse risulta di 1” si chiama Parsec (parallasse-secondo). Il Parsec risulta pari a 206,265 volte il semiasse maggiore dell’orbita terrestre, a sua volta chiamato Unità Astronomica (149'500'000 Km). Si può dimostrare che 1 Parsec = 3,26 anniluce. Evidentemente la misura della parallasse annua delle stelle fornisce immediatamente la loro distanza. - Precessione e nutazione A causa del rigonfiamento equatoriale della Terra, le azioni di attrazione del Sole e della Luna tendono a portare il piano dell’equatore su quello dell’Eclittica. Poiché la Terra è animata di rotazione intorno al proprio asse, risponde a questa azione con un moto di precessione. Precisamente l’asse di rotazione tende a sovrapporsi al vettore momento che risulta perpendicolare al piano della coppia di forze generate dall’attrazione. L’asse terrestre descrive perciò un cono intorno al polo dell’Eclittica, ampio 46°54’ circa, in un tempo di circa 26'000 anni siderali. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 98 Navigazione Stimata – (III) Cosmografia Fenomeno di precessione e nutazione dell’asse terrestre Il moto dell’asse in realtà è ondulato perché composto anche dal movimento di nutazione. Lo spostamento dell’asse terrestre tra le stelle produce una variazione delle coordinate equatoriali degli astri e la precessione degli equinozi. Attualmente il Polo Nord dista poco meno di 1° dalla Stella Polare. Tra circa 13'000 anni, l’asse polare sarà diretto, all’incirca, verso la stella Vega (α Lirae). Le stelle e le Costellazioni Le stelle. Sono corpi celesti della stessa natura del Sole. Quelle visibili appaiono puntiformi e di diverso splendore. In una notte chiara con atmosfera scura, nell’emisfero visibile, si possono contare circa 3000 stelle. Ipparco di Nicea (190-120 a.C.) introdusse per primo il concetto di magnitudine stellare. Esse vengono suddivise in 6 classi di grandezze apparenti o magnitudini. Il criterio adottato è il seguente: le 20 stelle più lucenti sono dette di Prima grandezza e quelle appena visibili di Sesta grandezza. - Magnitudine La risposta del nostro occhio agli stimoli luminosi è logaritmica. Le grandezze intermedie sono stabilite in modo che nel passare da una all’altra l’occhio percepisce la stessa variazione di sensazione. Le stelle di IIa grandezza sono circa 2,5 volte più deboli di quelle di Ia grandezza, quelle di IIIa grandezza sono 2,5 volte più deboli di quelle di IIa e così via. Un astro di magnitudine 1.0 è esattamente 100 volte più luminoso di uno di 6.0, per cui se vogliamo conoscere il rapporto di luminosità tra una magnitudine e la successiva, dobbiamo dividere il numero 100 in 5 parti proporzionali, ovvero in modo che rimanga costante il rapporto tra un valore e quello subito precedente. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 99 Navigazione Stimata – (III) Cosmografia Ciò equivale a calcolare la radice quinta, ossia 5 100 , che si può altresì scrivere 102/5, oppure, in modo del tutto equivalente, 100,4 . Il valore della radice quinta di 100 è 2,511886, che arrotondato per eccesso, si suole scrivere 2,512. Assumendo questo numero come base per un sistema di logaritmi, proviamo a scrivere la seguente progressione geometrica: 1 2,512 6,310 15,849 39,811 100,.. (2,512)3 (2,512)4 (2,512)5 I cui termini corrispondono rispettivamente a: (2,512)0 (2,512)1 (2,512)2 Da quest’ultima sequenza, si vede immediatamente che i vari esponenti non sono altro che i logaritmi che occorre dare alla base 2,512 per avere quei numeri che in questo caso rappresentano le luminosità stellari che decrescono. Ricordiamo, infatti, che a una maggiore magnitudine corrisponde una minore luminosità. Se, per esempio, una certa stella è 20 volte più debole di un’altra, per conoscere la differenza di magnitudine basterà calcolare il logaritmo stellare di 20, ossia log 2,512 20 . Questo sistema di logaritmi si rivela nella realtà poco pratico poiché nessuna calcolatrice è impostata per logaritmi in tale base. Utilizzando una proprietà fondamentale dei logaritmi (logB N = log N : log B), in cui B è la base ed N un numero qualunque positivo, l’esempio precedente può essere scritto: log 2,512 20 = log10 20 : log10 2,512 Notiamo che 2,512 non è altro che la radice quinta di 100 , ossia 100,4. Dal momento che il logaritmo è l’esponente che va dato alla base per ottenere il numero, risulta che il log10 100,4 è 0,4. L’espressione precedente può essere scritta: log 2,512 20 = log10 20 : 0,4 Ma dividere un numero per 0,4 equivale a moltiplicarlo per 2,5 e questo ci conduce all’espressione definitiva che è, pertanto: log 2,512 20 = 2,5 ⋅ log10 20 Quindi, se una stella è 20 volte meno brillante di un’altra, avrà una magnitudine 3,25 volte superiore; infatti, log1020 = 1,3 ; (2,5 1,3 = 3,25). Le costellazioni. Sono raggruppamenti di stelle che formano figure particolari, facilmente distinguibili. Gli antichi vedevano in tali figure forme di animali o di personaggi mitologici, da cui i nomi di Orsa Maggiore, Orsa Minore, Orione, Cane Maggiore, Toro, Pegaso, ecc. Le costellazioni risultano utili per l’individuazione delle stelle col metodo degli allineamenti. Disponendo di una carta stellare è possibile riconoscere una stella qualsiasi dalla sua posizione relativa di una costellazione facilmente individuabile. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 100 Navigazione Stimata – (III) Cosmografia L'Eclittica sullo sfondo delle costellazioni - Lo zodiaco Oltre 2000 anni fa (Ipparco), il Sole nel momento in cui transitava per l’equatore passando dall’emisfero australe a quello boreale, il 21 Marzo entrava nella costellazione dell’Ariete. Attualmente, passando per lo stesso Punto vernale γ alla stessa data, a causa della precessione degli equinozi incontra la costellazione dei Pesci. Il Sole, per il suo moto apparente sull’Eclittica, si porterà n congiunzione, di mese in mese, con gli altri asterismi, le cosiddette Costellazioni dello Zodiaco. Zodiaco è la parola che deriva dal greco e significa “strada degli animali”, perché la maggior parte delle Costellazioni che lo compongono hanno nome di animali. Le Costellazioni zodiacali formano la “strada” celeste, lungo la quale, per gli antichi, era il tracciato del percorso del Sole nel suo moto attorno alla Terra. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 101 Navigazione Stimata – (III) Cosmografia Se si immagina di tracciare due paralleli celesti, corrispondenti a β = 9° Nord e Sud, si viene a determinare sulla Sfera Celeste una fascia di 18° a cavallo dell’Eclittica, nella quale si trovano sempre i corpi celesti appartenenti al sistema solare. Questa fascia prende il nome di Zodiaco, in quanto attraversa 12 costellazioni aventi, per la maggior parte, i nomi di animali. Le Costellazioni dello Zodiaco sono 12 come i mesi dell’anno, ma ciascuna di esse coincide solo parzialmente con il mese. Cominciando dal 21 Marzo, così si succedono a scadenza di 30 giorni: Ariete, Toro, Gemelli, Cancro, Leone, Vergine, Bilancia, Scorpione, Sagittario, Capricorno, Acquario, Pesci. - Evoluzione delle stelle La massa, la luminosità e le dimensioni delle stelle sono molto varie. Ciò dipende in parte dall'equilibrio che ha raggiunto la stella nella sua fase di evoluzione che può essere rappresentata mediante il diagramma di Hertzsprung-Russel (H.R.). Questo riporta in ordinate le grandezze assolute delle stelle ed in ascissa le temperature superficiali in gradi assoluti (°K). La maggior parte delle stelle della Via Lattea si viene a trovare disposta lungo la fascia detta sequenza principale. Più precisamente, in alto a sinistra si trovano le stelle giganti blu, mentre scendendo verso il basso a destra si hanno le stelle nane rosse a bassa temperatura. Il Sole nella fase attuale si trova nella zona mediana della sequenza principale. Dal ramo principale si stacca la sequenza secondaria delle giganti rosse mentre una posizione a parte occupano le supergiganti rosse, come Betelgeuse o Antares, che hanno un diametro centinaia di volte più grande di quello del Sole ma una relativa bassa temperatura superficiale. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 102 Navigazione Stimata – (III) Cosmografia Diagramma semplificato di Hertzsprung-Russel della evoluzione delle stelle Ancora un posto fuori della sequenza principale occupano le nane bianche, che sono stelle che hanno subito un collasso per esaurimento di combustibile nucleare. Generalmente sono il prodotto finale di un'evoluzione stellare la cui vita può variare da alcune centinaia di milioni di anni a più di dieci miliardi di anni, a seconda della massa di gas che si è contratta in origine formando la stella. Hanno una densità molto grande, fino a 108 g/cm3. Stelle novae e supernovae. Spesso l'uomo ha notato che alcune stelle avevano cambiato repentinamente il loro splendore. Questo fenomeno può essere dovuto sia al passaggio di una stella scura davanti al suo compagno, sia all'esplosione di una stella. Stelle di neutroni. Le stelle medie, come il Sole nell'evoluzione finale, si trasformano in nane bianche. Se però in partenza la stella ha una massa più grande del Sole, nell'istante del collasso le forze di gravitazione sono così elevate che il risultato è una stella di neutroni con densità enormi 1013 g/cm3. Le stelle supernovae potrebbero essere degli stadi intermedi che portano alla formazione di una stella di neutroni. Buchi neri. Sono l’ultimo prodotto di una serie di trasformazioni che portano alla morte di una stella. La materia è concentrata in volumi ridottissimi con campi gravitazionali così grandi da risucchiare la materia dell’universo ed imprigionare i raggi luminosi entro il loro “orizzonte degli eventi”. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 103 Navigazione Stimata – (III) Cosmografia Galassie e quasar Una galassia è un agglomerato di stelle, materia interstellare, polvere cosmica, radiosorgenti. Spesso alcune decine di migliaia di stelle sono addensate in determinate regioni e formano gli ammassi globulari. Le galassie si presentano o in forma a spirale (le più comuni) o di forma ellittica. La nostra galassia, cioè la Via Lattea, ha una forma lenticolare. La dimensione maggiore è di circa 100000 anni luce, quella minore di circa 20000 anni luce. Il Sole è situato verso la periferia della galassia. Attualmente si calcola che esistono circa 10 miliardi di galassie. Con l’impiego di radiotelescopio, sono state individuate molte radiogalassie; le più lontane presentano una velocità radiale che si avvicina a quella della luce e distano alcuni miliardi di anni luce. Nel 1963 vennero identificate delle radiosorgenti le cui caratteristiche erano un piccolo diametro ed il loro aspetto stellare all’osservazione ottica. Esse, però, avevano uno spettro decisamente spostato verso il rosso e ciò suggeriva che questi oggetti fossero lontanissimi (come le galassie). La natura diversa dagli altri corpi celesti indussero gli astrofisici a denominarli con la sigla “Quasar”, (Quasi stellar radio source), cioè radiosorgenti quasi stellari. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 104 Navigazione Stimata – (III) Cosmografia APPENDICE 2 TEOREMI DI TRIGONOMETRIA PER LA RISOLUZIONE DEI TRIANGOLI SFERICI IN NAVIGAZIONE In questa Appendice verranno trattate le formule che permettono la risoluzione dei problemi della Navigazione Ortodromica e della Navigazione Astronomica. Le relazioni rappresentano i principali teoremi, applicati ai triangoli sferici, adoperati nello studio della disciplina. Il teorema di Eulero “in un triangolo sferico qualsiasi il coseno di un lato è dato dal prodotto del coseno degli altri due lati più il prodotto del seno degli stessi lati per il coseno dell’angolo tra essi compreso ed opposto al lato da calcolare” cos a = cos b cos c + sin b sin c cos α analogamente possono essere determinate le altre due relazioni: cos b = cos a cos c + sin a sin c cos β cos c = cos a cos b + sin a sin b cos γ Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 105 Navigazione Stimata – (III) Cosmografia Il teorema di Vieta o delle cotangenti Questo teorema lega quattro elementi consecutivi del triangolo sferico, due lati e due angoli. Per giungere alla sua formulazione si ricorre alla regola mnemonica che consente di scrivere in successione le sei funzioni trigonometriche che ne fanno parte: cotg sin cos cos sin cotg si noti come la successione delle ultime tre è l’inversa delle prime tre. Si supponga di ricavare l’angolo α ; nello schema si parte dall’elemento opposto. Dovremo scrivere: oppure : cotg a sin b = cos b cos γ + sin γ cotg α cotg a sin c = cos c cos β + sin β cotg α Analogamente potranno ricavarsi le altre relazioni : cotg b sin a = cos a cos γ + sin γ cotg β cotg b sin c = cos c cos α + sinα cotg β cotg c sin b = cos b cos α + sin α cotg γ cotg c sin a = cos a cos β + sin β cotg γ Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 106 Navigazione Stimata – (III) Cosmografia La regola mnemonica di Nepero Se il triangolo sferico è rettangolo le formule ricavate si semplificano notevolmente. Per risolvere un triangolo sferico rettangolo si fa ricorso alla regola del pentagono di Nepero. Allo scopo è necessario variare prima gli elementi del triangolo sostituendo ai due cateti i complementi lasciando invariati gli altri elementi, così come mostrato in figura (β = 90°). La regola dice che, soppresso l’angolo di 90° : il coseno di un elemento centrale è uguale : al prodotto dei seni degli elementi lontani al prodotto delle cotangenti degli elementi vicini così volendo il coseno dell’angolo α , avremo : cos α = sin γ sin (90° − a) = sin γ cos a cos α = cotg (90°− c) cotg b = tang c cotg b Considerando tutti gli altri elementi del triangolo sarà possibile ottenere altre otto relazioni che permettono la risoluzione del triangolo stesso. Risolvendo rispetto a c si avrà : cos (90°− c) = sin c = cotg α⋅ cotg (90°− a) = cotg α ⋅ tang a cos (90°− c) = sin c = sin b ⋅ sin γ Risolvendo rispetto agli altri elementi si possono determinare le seguenti relazioni : cos b = cotg α ⋅ cotg γ cos b = sin (90°− a)⋅ sin (90° − c) = cos a ⋅ cos c cos (90°− a) = sin a = cotg (90°− c)⋅ cotg γ = tang c⋅ cotg γ cos (90°− a) = sin a = sin α ⋅ sin γ cos γ = cotg b ⋅ cotg (90°− a) = cotg b⋅ tang a cos γ = sin (90°− c) ⋅ sin α = cos c ⋅ sin α NOTA. La regola mnemonica di Nepero si applica anche ai triangoli sferici rettilateri, dopo aver soppresso il lato di 90°, sostituito agli angoli adiacenti al lato di 90° i loro complementi (90°- …) e il supplemento all’angolo opposto (180° - ….). Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 107 Navigazione Stimata – (III) Cosmografia INDICE APPUNTI DI SCIENZE DELLA NAVIGAZIONE E TECNOLOGIE NAVALI 2-I PREFAZIONE ………………..……………………………………………………………….......... Pag 2 COMPETENZA IN ESITO N. 5 Organizzare la spedizione in rapporto alle motivazioni del viaggio ed alla sicurezza degli spostamenti ……… Pag 3 PARTE PRIMA NAVIGAZIONE STIMATA ( I ) - LOSSODROMIA LA NAVIGAZIONE LOSSODROMICA: GENERALITÀ ............................................................ Il punto stimato e la sua approssimazione ………………………………………………………… I PROBLEMI DELLA NAVIGAZIONE LOSSODROMICA ………………………………………... Navigazione per meridiano ………………………………............................................................ Navigazione per parallelo ……………………………………………………................................. 1° Problema della navigazione lossodromia (piccole distanze) ………………………………... 1° Problema della navigazione lossodromia (grandi distanze) …………………….…………... 2° Problema della navigazione lossodromia (piccole distanze) ………………………………... 2° Problema della navigazione lossodromia (grandi distanze) …………………….…………... CASI PARTICOLARI DELLA NAVIGAZIONE LOSSODROMICA ………………………………. SOLUZIONE GRAFICA DI CASI PARTICOLARI DELLA NAVIGAZIONE LOSSODROMICA Partenza simultanea …………………………………………………………………………………. Inseguimento ………………………………………………………………………………………….. Rotta di soccorso ……………………………………………………………………………………... » » » » » » » » » » » » » » 5 6 7 7 9 10 12 13 13 16 19 19 19 20 » » » » » » » » » » » » 23 24 25 27 28 29 31 33 34 36 40 41 PARTE SECONDA NAVIGAZIONE STIMATA (II ) - ORTODROMIA NAVIGAZIONE ORTODROMICA ………………………………………………………………...… Calcolo della distanza ortodromica ……………………………………………………………...…. Calcolo della Rotta iniziale ……………………………………………………………..................... Calcolo delle coordinate del Vertice ………………………………………………………………... 2° Problema della navigazione ortodromica ………………………………………………………. Calcolo della Rotta iniziale con le Tav. ABC ………………………………………………………. Spezzata lossodromica ……………………………………………………………………………… Condotta della navigazione ortodromica …………………………………………………………... Navigazione mista ……………………………………………………………………………………. Le carte gnomoniche ……….………………………………………………………………………... Impiego delle carte gnomoniche ……………………………………………………………………. L’ortodromia sulla carta di Mercatore ………………………………………………………………. Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 108 Navigazione Stimata – (III) Cosmografia PARTE TERZA NAVIGAZIONE ASTRONOMICA - COSMOGRAFIA LA SFERA CELESTE ………………………………………………………………………………... Punti e circoli fondamentali ……………………………………………………............................... » 47 » 47 SISTEMI DI COORDINATE ………………………………………………………...………………. Le coordinate locali altazimutali ……………………………………………………...…………….. Le coordinate locali orarie ………………………………………………………............................. L’eclittica ………………………………………………………………........................................... Le coordinate uranografiche equatoriali ………………………………………………………...…. Moto apparente diurno degli astri …………………………………………………………………... Le coordinate uranografiche eclittiche …………………………………………...………………… » » » » » » » 49 49 50 51 52 53 55 TRASFORMAZIONE DI COORDINATE ASTRONOMICHE …………….………………………. Il triangolo astronomico di posizione ………….……………………………………………………. Trasformazione di coordinate locali orarie in altazimutali ……………………………….............. Trasformazione di coordinate altazimutali in locali orarie ………………………………………... Casi particolari di trasformazione …………………………………………………………………... » » » » » 56 56 57 58 59 IL TEMPO E LA SUA MISURA …………………………………….............................................. L’equazione del tempo ………………………………………………………...……………………. Relazioni tra le ore simultanee di due osservatori …………………………………………… L’ora fuso …………………………………………...…………………………………………………. Calcolo dell’ora di arrivo (ETA) …………….……………………………………………………….. Calcolo dell’ora di partenza (ETD) ………….……………………………………………………... Il cronometro marino ………………………………..................................................................... Le linee di separazione delle date ………………………………………...................................... I crepuscoli …………………………………………………………………..................................... Le effemeridi nautiche …………………………………………...…………………………………... » » » » » » » » » » 60 62 63 65 66 66 67 69 70 71 MISURA DELLE ALTEZZE DEGLI ASTRI …………….………………………………………….. Il sestante ………….……………………………………………………......................................... Correzione delle altezze …………............................................................................................ Schema del calcolo ………………………………………............................................................ » » » » 78 78 80 81 DETERMINAZIONE DELLA LATITUDINE ………………………………………………………… Determinazione della latitudine con la Polare …………………………………………………...... » 82 » 82 IDENTIFICAZIONE DEGLI ASTRI ........................................................................................... Identificazione tramite il calcolo ……………………................................................................... Identificazione con lo Star finder and Identifier ……………………………………………………. » 84 » 84 » 85 CONTROLLO DELLE BUSSOLE …………………………………………………........................ Determinazione dell’azimut vero dell’astro con il calcolo ………………………………………… Azimut al sorgere e al tramonto del Sole (Amplitudine) ………………………………………….. Azimut con la stella Polare ………………………………............................................................ Controllo simultaneo delle bussole ………………………………………..................................... » » » » » Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 86 86 87 88 89 109 Navigazione Stimata – (III) Cosmografia APPENDICE 1 - L’UNIVERSO E IL SISTEMA SOLARE ………………………………………... Il Sole ………………………………………………………………….............................................. I Pianeti ………………………………………………………………………………………………... Le leggi di Keplero e Newton ……………………………………………………………………….. La Luna ………………………………......................................................................................... Le fasi lunari ………………………………………....................................................................... Variazione delle coordinate degli astri ………………………………………................................ Le stelle e le Costellazioni …………………………………………………………………………… Evoluzione delle stelle ………………………………………….................................................... Galassie e Quasar ………………………………………………………………………………….... » » » » » » » » » » 90 90 90 92 94 96 98 99 102 104 APPENDICE 2 - TEOREMI DI TRIGONOMETRIA SFERICA .................................................. Il teorema di Eulero ……………………….................................................................................. Il teorema di Vieta o delle cotangenti ………………………………………................................ La regola mnemonica di Nepero ……………………………………………………………………. » » » » 105 105 106 107 INDICE ……………………………………………………………................................................... » 108 Appunti di Scienze della Navigazione e Tecnologie Navali 2- I 110
© Copyright 2026 Paperzz