Propagazione degli errori
Argomenti:
¾ combinazioni degli errori;
¾ RSS: sviluppo intuitivo;
¾ RSS: sviluppo razionale;
¾ forme adimensionali.
1
Combinazione degli errori
All’interno di un singolo strumento, o di un sistema di misura, ogni
elemento costitutivo può essere fonte di imprecisione. Tali imprecisioni si
sommano in maniera statistica dando origine all’incertezza della misura,
cioè il campo di variabilità atteso, ad un assegnato livello di confidenza,
del valore numerico ottenuto tramite il rilevamento sperimentale.
sperimentale
Il problema può essere alternativamente posto in forma matematica come
lo stabilire in che modo le incertezze individuali di singole grandezze
influenzino l’incertezza di una grandezza derivata da queste.
Il problema prende il nome di propagazione degli errori.
Indipendentemente dall’origine delle incertezze, dalla loro entità o da
come esse possano essere determinate
determinate, il punto focale della
propagazione degli errori risiede nel trovare il modo più ragionevole per
combinarle.
L’obiettivo è ottenere un metodo che sia razionale e sufficientemente
cautelativo per non incorrere in problemi di qualità della misura, senza
però sovrastimare indebitamente l’errore commesso.
2
1
Problemi caratteristici
Disponendo delle misure di forza, spostamento e dimensione della sezione,
oltre alle relative incertezze, da quale incertezza è affetta la stima del
modulo elastico del materiale?
F = Fmis ± wF
s = smis ± ws
L = Lmis ± wL
a = amis ± wa
E=
L⋅F
a ⋅b⋅s
wE ?
b = bmis ± wb
dove F è la forza, L la lunghezza di un provino, a e b le dimensioni della
sezione, s lo spostamento misurato.
pp
Oppure:
Quali possono essere le incertezze ammissibili sulle dimensioni se si
desidera ottenere una assegnata incertezza sul volume di un cilindro?
V = π d2 h / 4
d = d mis ± wd
h = hmis ± wh
wh , wd
→ wV ≤ ε
3
Linearizzazione
Dedotto che la combinazione delle incertezze può essere applicata in
vari ambiti dell’ingegneria si deve definire una tecnica generale per la
soluzione di questo problema.
Data la generica funzione di più variabili:
Q( xi ) i = 1: n
La variazione della funzione può essere definita mediante la sua
linearizzazione attorno alla configurazione di riferimento:
2
n
⎛ ∂Q ⎞
∂Q
2
Q = Q( xi ) + ∑
dxi + ∑ ⎜
⎟ dxi + ...
x
x
∂
∂
i =1
i =1 ⎝
i
i ⎠
n
∂Q
Q( xi ) + ∑
dxi = Q( xi ) + dQ
i =1 ∂xi
n
n
Quindi:
dQ = ∑
i =1
∂Q
dxi
∂xi
L’equazione finale è esatta nel caso di variazioni infinitesime.
4
2
Linearizzazione
Nel caso delle misure, possiamo sostituire alle variazioni, dxi , le rispettive
incertezze di misura, wi , ottenendo una scostamento del risultato come
somma dei contributi di ciascuna misura:
∂Q
dxi
i =1 ∂xi
∂Q
wi
i =1 ∂xi
n
n
dQ ≅ ∑
ΔQ ≅ ∑
L’incertezza wi della variabile i-esima viene pesata dalla sensibilità della
grandezza Q al parametro stesso:
∂Q ∂xi
Il risultato ottenuto potrebbe essere utilizzato per definire l’incertezza della
misura Q come propagazione delle incertezze delle singole misure,
tipicamente espresse in termini di deviazione standard.
Dovremmo però
D
ò risolvere
i l
il problema
bl
di come effettuare
ff tt
lla somma:
¾ la somma algebrica è da scartare in quanto è arbitraria la scelta del
segno del singolo wi ;
¾ la somma in valore assoluto tende al limite superiore di errore
stimabile. Sarebbe però una stima troppo pessimistica: è minima la
probabilità che contemporaneamente tutti gli errori si trovino all’estremo
superiore della loro escursione.
5
RSS: dimostrazione euristica
La radice della somma dei quadrati (RSS: the Root of the Sum of the
Squares) definisce il risultato come dimensione caratteristica di un’area
ottenuta sommando areole elementari:
wQ =
n
∑w
i =1
wQi =
2
Qi
∂Q
wi
∂xi
Rappresenta una scelta ottimale, nel senso che tiene conto del fatto che
difficilmente dei segmenti di lunghezza wQi si troveranno perfettamente
allineati per produrre un segmento di lunghezza somma di tutte le rispettive
n
lunghezze:
wQ = ∑ wQi
i =1
D’altra parte i singoli wQi , interpretati in senso statistico, assumerebbero
proprio il significato di segmenti casualmente orientati.
In altri termini la RSS tiene conto della probabilità che i diversi errori
concorrano alla misura con un contributo inferiore al valore massimo
possibile; abbiamo però bisogno di un approccio meno «intuitivo»
6
3
RSS: dimostrazione razionale
La linearizzazione costituisce un modello deterministico della variazione
di Q a fronte di un cambiamento delle variabili indipendenti xi , i=1:m da
cui dipende:
Q = f ( xi ) i = 1: m
Q = Q0 +
∂Q
∂Q
dx1 + ... +
dxm
∂x1
∂xm
0
0
Gli errori di misura sono però grandezze stocastiche, conoscibili solo
secondo i loro parametri statistici che ne caratterizzano la distribuzione
(media e deviazione standard).
Il problema diventa quindi:
come è possibile trasformare razionalmente la formula
deterministica in modo che possa gestire gli errori
tipicamente esprimibili in termini di deviazione
standard?
Per definire sinteticamente una serie di misure abbiamo utilizzato gli
operatori media e deviazione standard: applichiamo lo stesso
approccio alla variabile Q utilizzando la sua linearizzazione
7
RSS
Effettuando N acquisizioni delle variabili indipendenti xi , i=1:n saremmo in
grado di scrivere:
Q=
1
N
N
∑Q
k =1
k
SQ2 ≈
1
N
∑ (Q
N
k =1
k
− Q)
2
Per valutare N volte Q è (Qk , k=1:N ) è necessario acquisire ogni volta le
m misure x (xi , i=1:m).
Indichiamo la misura i-esima dell’acquisizione k-esima con:
xi,k
Abbiamo N vettori {x}k ciascuno composto da m termini xi : {xi, i=1:n}k, k=1:N
Al generico vettore di misure {xi, i=1:m}k corrisponde la valutazione Qk
Ricaviamo le valutazioni Qk come linearizzazione della variabile
nell’intorno del punto di misura nominale (valor medio) utilizzando uno
sviluppo di Taylor nelle m variabili xi arrestato al primo ordine:
Qk = Q +
∂Q
∂Q
dx1, k + ... +
dxn , k = Q + Q/ x1 dx1, k + ... + Q/ xn dxn , k
∂x1
∂xn
8
4
RSS
xi =
Definito il valor medio
1
N
N
∑x
k =1
i ,k
Per la singola variabile xi il termine dxi , k ha il significato di deviazione
q
della misura dalla media xi della k-esima acquisizione:
dxi , k = xi , k − xi
La deviazione della k-esima valutazione di Q in termini matriciali diventa:
Qk − Q = Q/ x1 dx1, k + ... + Q/ xm dxm , k = ⎣⎡ dx1, k
⎧ Q/ x1 ⎫
⎪
⎪
T
... dxm , k ⎦⎤ ⎨ M ⎬ = {dx}k {Q/ x }
⎪Q ⎪
⎩ / xm ⎭
Avendo definito i vettori:
- sensibilità, indipendente dal set di misura:
{Q/ x }
- deviazioni di ogni misura del set k-esimo dal
valore medio di tutti gli N set di misure:
{dx}k
9
RSS: sviluppo matriciale
Avendo espresso lo scostamento della k-esima misura come:
Qk − Q = {dx}k
T
{Q/ x } = { xk − x } {Q/ x }
T
⎧ x1, k − x1 ⎫
{ xk − x } = ⎪⎨ M ⎬⎪
⎪
⎪
⎩ xn , k − xn ⎭
Possiamo determinare la varianza rispetto al valor medio delle
valutazioni Qk :
SQ2 ≈
(
2
1 N
1 N
T
Qk − Q ) = ∑ { xk − x } {Q/ x }
(
∑
N k =1
N k =1
) ({ x
T
k
− x } {Q/ x }
T
)
Essendo poi i coefficienti di sensibilità indifferenti alla sommatoria sulle
acquisizioni:
N
T ⎛ 1
T ⎞
SQ2 ≈ {Q/ x } ⎜ ∑ ⎡{ xk − x }{ xk − x } ⎤ ⎟ {Q/ x }
⎣
⎦⎠
⎝ N k =1
10
5
RSS: sviluppo matriciale
N
T ⎛ 1
T ⎞
SQ2 ≈ {Q/ x } ⎜ ∑ ⎡{ xk − x }{ xk − x } ⎤ ⎟ {Q/ x }
⎣
⎦⎠
⎝ N k =1
L’operatore matriciale, di ordine pari al numero m di grandezze misurate,
nella parentesi tonda viene definito matrice di covarianza:
T ⎞
⎛1 N
⎡⎣Cov({dx}) ⎤⎦ = ⎜ ∑ ⎡⎢{ xi , k − xi }{ x j , k − x j } ⎤⎥ ⎟
⎦⎠
⎝ N k =1 ⎣
Nei due termini in parentesi quadra sono stati esplicitati gli indici i e j per
evidenziare la presenza dei prodotti incrociati tra le misure delle
grandezze i e j; infatti il singolo termine della matrice è:
⎛1 N
⎞
Covi , j = ⎜ ∑ ⎡⎣( xi , k − xi ) ( x j , k − x j ) ⎤⎦ ⎟
⎝ N k =1
⎠
Si ottiene infine l’espressione della varianza della grandezza Q in
funzione dei vettori di sensibilità{Q/ x } e della matrice di covarianza delle
misure [Cov ({dx})] :
SQ2 ≈ {Q/ x } ⎣⎡Cov({dx}) ⎦⎤ {Q/ x }
T
11
RSS
I termini della matrice di Covarianza vengono definiti come:
varianza se diagonali
(o auto-covarianza)
Si2 ≈
e di
covarianza se extradiagonali
Si2, j ≈
1
N
1
N
N
∑(x
k =1
N
∑(x
k =1
i ,k
i ,k
− xi )
2
− xi ) ( x j ,k − x j )
Ma quale significato hanno le covarianze?
¾ Rappresentano l’interazione delle deviazioni dei diversi termini dello
sviluppo ovvero una misura di quanto le due variabili cambino insieme,
siano cioè dipendenti tra loro.
¾ Quando sono auto-covarianze (i=j) il risultato è la varianza, forma
quadratica sempre positiva.
¾ Quando sono covarianze (i≠j) gli scostamenti delle due variabili dai
rispettivi valori medi si combinano algebricamente e la sommatoria sulle
N misure, questo può comportare cancellazione.
12
6
RSS: applicabilità
Le varianze, i termini diagonali, vedono sommarsi in modulo i prodotti
degli scostamenti di due variabili, quindi l’accumulo fornisce sempre valori
positivi.
Al contrario i contributi ai termini extra-diagonali si accumulano con segno
e in
i particolari
ti l i condizioni
di i i possono elidersi.
lid i
La somma dei prodotti può dare luogo a cancellazione se:
¾ le incertezze non sono correlate tra loro, cioè se i motivi che
determinano scostamenti dal valor medio di ciascuna delle due
variabili sono indipendenti e le variazioni imprevedibilmente positive e
negative;
¾ se scostamenti positivi e negativi di una data entità hanno eguale
probabilità di p
p
presentarsi.
In queste condizioni le covarianze tendono a zero all’aumentare del
numero di misure.
Nel caso di incertezze correlate gli scostamenti hanno la stessa
tendenza, ovvero crescono e diminuiscono insieme, impedendo la
cancellazione del coefficiente della covarianza e aumentando l’incertezza
propagata.
13
RSS: applicabilità
Nel caso di misure affette da incertezze non correlate e a distribuzione
simmetrica, la matrice di covarianza risulta essere diagonale, con
ciascun termine dato dalla varianza della variabile corrispondente.
In questo caso la varianza della variabile Q si riduce dalla somma delle
varianze
i
d ll singole
delle
i
l misure:
i
l RSS.
la
RSS
Le ipotesi di indipendenza e di simmetria degli scostamenti delle
incertezze di variabili casuali sono NORMALMENTE ragionevoli MA
DEVONO ESSERE VERIFICATE
Es. se le incertezze di misura sono dovute tutte allo stesso strumento è
ancora lecito ritenere che esse siano indipendenti?
Per poter utilizzare la RSS è quindi necessario che le variabili misurate
siano indipendenti e che siano indipendenti le rispettive incertezze, cioè
l’incertezza su una misura non deve influenzare l’incertezza di un’altra.
Come vedremo meglio nel proseguo le incertezze che si introducono
nella formula devono essere definite in maniera coerente dal punto
di vista probabilistico.
14
7
RSS: applicabilità
)(
Nel caso di grandezze di ingresso correlate
1 N
2
xi ,k − xi x j ,k − x j
sono significativi anche i termini di covarianza Si , j ≈ N
k =1
La matrice di covarianza non è diagonale e la RSS non è più applicabile
∑(
)
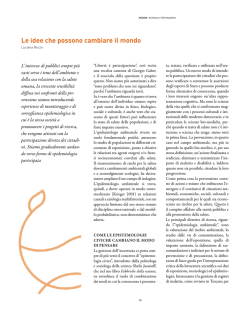
La correlazione tra le incertezze di due grandezze nominalmente
indipendenti può essere data da una dipendenza comune da una stessa
variabile di interferenza/modifica.
Effetto evidenziabile con un diagramma delle deviazioni
Incertezze scorrelate
6
Deviazioni Missura Y
Deviazioni Missura Y
6
4
2
0
-2
-4
Incertezze correlate
4
2
0
-2
-4
-6
-6
-6
-4
-2
0
2
4
6
-6
Deviazioni Misura X
-4
-2
0
2
4
6
15
Deviazioni Misura X
Esempio 1
Nel caso del cilindro:
V = π d2 h / 4
Assumendo i seguenti valori:
V=82033 mm3
d = d mis ± wd
h = hmis ± wh
d = 32 ± 1 mm
(±3.13%)
h = 102 ± 1 mm
(±0.98%)
0 98%)
wV?
⎛ ∂V
⎞ ⎛ ∂V
⎞
wV = ⎜
× wd ⎟ + ⎜
× wh ⎟ =
∂
d
∂
h
⎝
⎠ ⎝
⎠
2
2
(2π dh / 4 × wd ) 2 + (π d 2 / 4 × wh ) 2
wV =
2286941 + 646814=5189.8mm3 ( ±6.33%)
16
8
Esempio 2
Consideriamo la stima della potenza dissipata da una resistenza in un
circuito elettrico utilizzando una misura della tensione applicata. La
resistenza ha un valore nominale di 100±5 Ohm, mentre il voltmetro
fornisce una lettura di 28.0±0.05V
La potenza nominale è:
P = V 2 / R = 282 / 100 = 7.84W
Nell’ipotesi di incertezze indipendenti applicheremo la RSS:
⎛ ∂P
⎞
2
⎛ ∂P
⎞
2
δ ( P) = ⎜
wV ⎟ + ⎜
wR ⎟
⎝ ∂V
⎠ ⎝ ∂R ⎠
Le sensitività sono quindi:
∂P
V2
282
=− 2 =−
= −0.078
∂R
R
100 2
∂P 2V 2 × 28
=
=
= 0.56
R
∂V
100
17
Esempio 2
Riportiamo l’espressione di calcolo ed i valori numerici:
⎛ ∂P
⎞ ⎛ ∂P ⎞
δ ( P) = ⎜
wV ⎟ + ⎜
wR ⎟
⎝ ∂V
⎠ ⎝ ∂R ⎠
2
2
wV = 0.05 V
wR = 5 Ω
∂P
= −0.078
∂R
∂P
= 0.56
∂V
δ ( P) = (0.56 × 0.05) 2 + ( −0.078 × 5) 2 = 0.000784 + 0.152 = 0.39 W
ΔP % = 0.39 / 7.84 = 5.01%
L incertezza è data per la maggior parte dalla resistenza ben più di quanto
L’incertezza
dica il rapporto delle incertezze percentuali:
Tensione 1.8% , Resistenza 5% contro
0.000784 e 0.152.
Sarebbe quindi inutile cercare di migliorare la situazione utilizzando un
voltmetro più preciso.
18
9
Esempi: commenti
Come deducibile dal confronto dei termini sotto radice, se si vuole
migliorare il risultato, occorre ridurre l’incertezza del diametro in quanto
il suo contributo è dominante rispetto a quello dell’altezza.
Poiché i singoli termini sono moltiplicati per il fattore di sensibilità il
gg
non necessariamente l’incertezza maggiore,
gg
contributo maggiore,
tende a dominare il risultato.
La RSS è una relazione che in maniera generale, permette di mettere in
evidenza sia l’errore dovuto alla singola misura, sia il peso di questa sul
risultato.
Per la sperimentazione l’analisi del peso dei singoli termini che
concorrono a determinare l’incertezza è fondamentale per ridurre nella
maniera più efficiente il margine di errore associato ad una misura:
¾ se un’incertezza ha un peso elevato sarà opportuno tenerla sotto
controllo e agire sul termine con peso maggiore darà il
miglioramento più significativo
¾ conviene agire sulla qualità dello strumento con il contributo
peggiore piuttosto che pensare di migliorare tutti gli strumenti della
catena di misura.
19
Incertezza relativa
20
10
Incertezza relativa
In fase di progetto può risultare conveniente riorganizzare la RSS nel
modo seguente:
2
⎛ wQ ⎞
1 ⎛ xi ⎞
⎜
⎟ = ⎜ ⎟
⎝ Q ⎠ Q ⎝ xi ⎠
2
2
2
2
⎛ ∂Q ⎞ 2
⎛ x ∂Q ⎞ ⎛ w ⎞
2
2
∑i ⎜ ∂x ⎟ wi = ∑i ⎜ Qi ∂x ⎟ ⎜ x i ⎟ = ∑i ci wi %
i ⎠ ⎝ i ⎠
⎝ i⎠
⎝
ci =
avendo così definito il coefficiente di amplificazione
dell’incertezza relativa:
xi ∂Q
Q ∂xi
Questi coefficienti permettono di valutare direttamente il peso relativo delle
singole incertezze ovvero di capire a quali elementi occorre prestare più
attenzione in fase di progetto, ragionando a incertezze relative
equivalenti
equivalenti.
Nel caso della misura di potenza ci dice che la tensione potrebbe essere la
misura più critica poiché, tenendo conto del quadrato, il rapporto è 4:1
cV =
V ∂P
V 2V
= 2
=2
P ∂V V / R R
R ∂P
R ⎛ V2 ⎞
= 2
⎜ − ⎟ = −1
P ∂R V / R ⎝ R 2 ⎠
cR =
21
Incertezza percentuale
Interessante un’altra forma di normalizzazione, utile in fase di analisi:
⎛ wQ
⎜
⎝ Q
⎛ wQ
⎜
⎝ Q
2
⎛ xi
⎞
⎜
⎟
⎠ =1 = ⎝ Q
∑i
2
⎞
⎟
⎠
2
∂Q ⎞ ⎛ wi ⎞
⎟ ⎜ ⎟
∂xi ⎠ ⎝ xi ⎠
2
⎛ wQ ⎞
⎜
⎟
⎝ Q ⎠
2
2
= ∑ ( ci )
i
2
⎛ wi % ⎞
⎜⎜
⎟⎟ = ∑ ci %
i
⎝ wQ % ⎠
⎛ x ∂Q ⎞ ⎛ wi % ⎞
Avendo introdotto il contributo percentuale: ci % = ⎜ i
⎟⎟
⎟ ⎜⎜
⎝ Q ∂xi ⎠ ⎝ wQ % ⎠
2
2
2
⎛ V ∂P ⎞ ⎛ wV % ⎞
⎛ 0.0018 ⎞
cR % = 0.9949
cV % = ⎜
⎟ = ⎜2
⎟ ⎜
⎟ = 0.00507
P
∂
V
w
⎝
⎠ ⎝ P% ⎠
⎝ 0.0501 ⎠
2
2
Questo coefficiente è complessivo:
p
considera sia la sensibilità ad una
variabile che la sua variazione.
La normalizzazione rispetto alla variazione relativa del parametro Q
permette di valutare con semplicità il peso relativo dei vari contributi.
Ci dice quanto già concluso nella prima analisi: l’incertezza sulla misura
di resistenza è determinante; per migliorare il risultato occorre bilanciare
la qualità delle misure, riducendo l’incertezza sulla resistenza.
22
11
Caso particolare
Esaminiamo il caso in cui la relazione sia costituita da una produttoria di
n
n
potenze:
∂Q
Q = C ∏ xiai
∂xk
i =1
= Cak xkak −1
∏
i =1,i ≠ k
xiai
L’errore
L
errore relativo sulla grandezza misurata risulta essere legato alle
incertezze individuali secondo la relazione seguente:
wQ
Q
2
⎛w
⎞
∑i ⎜ x i × ai ⎟ =
⎝ i
⎠
=
∑(a × w )
i
2
i%
i
La relazione è particolarmente semplice e facile da ricordare: si
sommano i quadrati delle incertezze percentuali pesate per l’esponente
d l corrispondente
del
i
d t parametro.
t
Nel caso di un semplice prodotto, quindi esponenti unitari:
wQ % =
wQ
Q
∑(w )
=
2
i%
i
23
Esempio 3
Consideriamo la prova di flessione di una trave caricata in mezzeria.
F,d
d=
Fl 3
48 EI
Essendo la lunghezza della trave l=50 ±0.5 ft , assumendo di effettuare
una prova con F=100±1 ton e che si ritiene di poter misurare con ottima
precisione il modulo di Young (E) e la rigidezza di sezione (I) si richiede di
determinare l’incertezza percentuale della freccia del punto di carico.
Trattandosi di incertezze evidentemente indipendenti applicheremo la
RSS:
Idealmente:
wd % =
(a
F
wF % ) + ( a l wl % ) + ( a I wI % ) + ( a E wE % )
Per il nostro sottocaso:
wd % =
( wF % )
2
+ ( 3wl % ) =
2
2
2
2
( 0.01 / .013 )2 ++ 99*.01
( 0.012/ 3 )
2
2
2
= 1.82%
E’ quindi opportuno «spendere» per ridurre l’incertezza sulla misura della
lunghezza della trave che costituisce il 90% del totale
24
12
Da ricordare
Come combinare errori o incertezze.
Come valutare il concatenarsi di incertezze in un sistema di misura
tramite la RSS.
Come valutare se i limiti di applicabilità dello schema RSS sono
rispettati.
Come stimare in termini relativi l’importanza dei diversi contributi.
Come identificare i parametri su cui operare per ridurre le incertezze.
25
Domande?
26
13
Approfondimento: dimostrazione della RSS con
sviluppo analitico delle sommatorie
27
RSS: passaggi dello sviluppo esteso
Il primo passaggio consiste nello sviluppo del quadrato:
2
2
⎞
∂Q
∂Q
1 N
1 N ⎛
S ≈ ∑ ( Qk − Q ) = ∑ ⎜ Q +
( x1k − x1 ) + ... +
( xnk − xn ) − Q ⎟ =
N k =1
N k =1 ⎝
∂x1
∂xn
⎠
2
Q
2
1 N ⎛ ⎛ ∂Q ⎞
2
⎜⎜
x1k − x1 ) + ...
(
⎟
∑
N k =1 ⎜ ⎝ ∂x1 ⎠
⎝
⎞
⎛ ∂Q ⎞⎛ ∂Q ⎞
+2 ⎜
⎟⎜
⎟ ( x1k − x1 )( x2 k − x2 ) + ... ⎟⎟ =
⎝ ∂x1 ⎠⎝ ∂x2 ⎠
⎠
Il primo indice è relativo alla variabile, il secondo alla misura
Si riconosce la presenza di termini quadratici e misti
28
14
RSS: passaggi dello sviluppo esteso
Isolando le singole sommatorie e riconoscendo che le derivate sono
indipendenti dalla sommatoria, otteniamo:
2
⎞
1 N ⎛ ⎛ ∂Q ⎞
2
= ∑⎜⎜
x1k − x1 ) ⎟ + ...
(
⎟
⎟
N k =1 ⎜ ⎝ ∂x1 ⎠
⎝
⎠
⎞
1 N ⎛ ⎛ ∂Q ⎞⎛ ∂Q ⎞
⎜⎜ 2 ⎜
⎟⎜
⎟ ( x1k − x1 )( x2 k − x2 ) ⎟⎟ + ... =
∑
N k =1 ⎝ ⎝ ∂x1 ⎠⎝ ∂x2 ⎠
⎠
2
⎛ ∂Q ⎞ 1 N
2
=⎜
( x1k − x1 ) + ...
⎟
∑
⎝ ∂x1 ⎠ N k =1
⎛ ∂Q ⎞⎛ ∂Q ⎞ 1 N
2⎜
⎟⎜
⎟ ∑ ( x1k − x1 )( x2 k − x2 ) + ...
⎝ ∂x1 ⎠⎝ ∂x2 ⎠ N k =1
29
RSS: passaggi dello sviluppo esteso
Se introduciamo le definizioni di:
varianza della misura k-esima
covarianza della misure j- e k-esima
Si2 =
Si2, j =
1 N
2
∑ ( xki − xi )
N k =1
1 N
∑ ( xki − xi ) ( xkj − x j )
N k =1
otteniamo infine
2
⎛ ∂Q ⎞ 2
⎛ ∂Q ⎞⎛ ∂Q ⎞ 2
S q2 = ⎜
⎟ S1 + ... + 2 ⎜
⎟⎜
⎟ S1,2 + ... =
⎝ ∂x1 ⎠
⎝ ∂x1 ⎠⎝ ∂x2 ⎠
n −1 n ⎛
⎛ ∂Q ⎞ 2
∂Q ∂Q ⎞ 2
= ∑⎜
⎟⎟ Si , j
⎟ Si + 2∑ ∑ ⎜⎜
i =1 ⎝ ∂xi ⎠
i =1 j = i +1 ⎝ ∂xi ∂x j ⎠
n
2
30
15
RSS: passaggi dello sviluppo esteso
In forma più compatta possiamo scrivere:
n −1 n ⎛
⎛ ∂Q ⎞ 2
∂Q ∂Q ⎞ 2
S = ∑⎜
S
+
2
⎜⎜
⎟⎟ Si , j
⎟ i
∑
∑
i =1 ⎝ ∂xi ⎠
i =1 j = i +1 ⎝ ∂xi ∂x j ⎠
2
n
2
Q
Nel caso di incertezze scorrelate, quindi indipendenti, si ha che:
Si2, j =
Quindi
1 N
∑ ( xki − xi ) ( xkj − x j ) ⇒ 0
N k =1
2
⎛ ∂Q ⎞ 2
S = ∑⎜
⎟ σi
i =1 ⎝ ∂xi ⎠
n
2
Q
Cioè la RSS.
L’ipotesi di indipendenza delle incertezze di variabili casuali è
ragionevole ma deve essere verificata.
31
16
© Copyright 2026 Paperzz