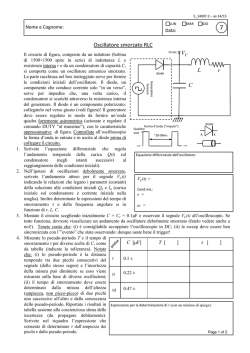
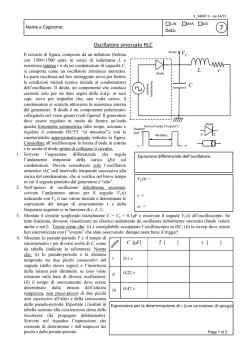
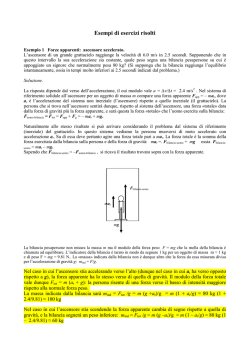
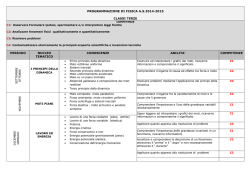
Lezione 5: Sistemi ad un grado di libertà: l’oscillatore elementare (5) Federico Cluni 13 Marzo 2014 1 1.1 Oscillazioni con forzante qualsiasi Sovrapposizione degli effetti L’equazione del moto di un oscillatore elementare con smorzamento sottoposto ad una forzante generica è pari a: F (t) x ¨ + 2 ν ω1 x˙ + ω12 x = (1) m Si supponga di aver risolto il problema del moto sotto una forzante F1 (t) e condizioni al contorno x(0) = x0,1 e x(0) ˙ = x˙ 0,1 , per cui la soluzione è: F1 (t) x ¨ + 2 ν ω1 x˙ + ω12 x = m ⇒ x1 (t) x(0) = x0,1 x(0) ˙ = x˙ 0,1 (2) Si sia risolto il problema del moto anche sotto una forzante F2 (t) e condizioni al contorno x(0) = x0,2 e x(0) ˙ = x˙ 0,2 , per cui la soluzione è: F2 (t) x ¨ + 2 ν ω1 x˙ + ω12 x = m ⇒ x2 (t) x(0) = x0,2 x(0) ˙ = x˙ 0,2 (3) Allora, per la linearità dell’equazione differenziale (1) si ha che il problema del moto sotto forzante F1 (t) + F2 (t) e condizioni al contorno x(0) = x0,1 + x0,2 e x(0) ˙ = x˙ 0,1 + x˙ 0,2 ha soluzione x(t) = x1 (t) + x2 (t): F1 (t) + F2 (t) x ¨ + 2 ν ω1 x˙ + ω12 x = m ⇒ x1 (t) + x2 (t) x(0) = x0,1 + x0,2 x(0) ˙ = x˙ 0,1 + x˙ 0,2 1.2 (4) Risposta all’impulso unitario Il teorema dell’impulso asserisce che la variazione della quantità di moto di un sistema è pari all’impulso delle forze agenti. Nel caso dell’oscillatore elementare si ha quindi che per due istanti generici t1 e t2 : Z t2 (m x(t ˙ 2 ) − m x(t ˙ 1 )) = F (t)dt t1 1 (5) Si supponga che sul sistema, inizialmente in quiete con x(0) = 0 e x(0) ˙ = 0 agisca in un 1 intervallo di tempo ∆t una forza costante pari a . In tal caso l’impulso ha valore unitario per ∆t qualsiasi valore di ∆t. Ponendo per semplicità t1 = 0 si ha t2 = ∆t: Z ∆t m x(∆t) ˙ = 0 quindi: x(∆t) ˙ = 1 dt = 1 ∆t (6) 1 m (7) facendo tendere ∆t a zero si ha: 1 (8) m Si noti che in tale circostanza la forza assume un valore che tende ad infinito, ma l’impulso si mantiene unitario. La forza è detta impulsiva, e può essere modellata attraverso la funzione delta di Dirac. x(0 ˙ +) = Figura 1: Impulso unitario e funzione delta di Dirac In definitiva si ha che se all’oscillatore viene applicata una forza impulsiva, con impulso unita1 rio, esso acquista una velocità pari a . La sua posizione rimane tuttavia invariata. L’oscillatore m si muove da dopo l’applicazione dell’impulso in poi in regime di oscillazioni libere, in quanto le forze agenti sono nulle. Per studiare il moto (dall’istante successivo a quello di applicazione dell’impulso) basta quindi risolvere il problema con le condizioni iniziali: ( p x(0) = 0 1 √ exp (−νω1 t) sin ω1 1 − ν 2 t (9) 1 ⇒ x(t) = x(0) ˙ = m ω1 1 − ν 2 m La funzione: h(t) = p 1 √ exp (−νω1 t) sin ω1 1 − ν 2 t m ω1 1 − ν 2 (10) è detta funzione di risposta all’impulso unitario. Se l’impulso unitario è applicato all’istante τ invece che al tempo 0 la risposta per t > τ è data da: p 1 √ h(t − τ ) = exp (−νω1 (t − τ )) sin ω1 1 − ν 2 (t − τ ) (11) m ω1 1 − ν 2 2 1.3 Integrale di Duhamel Nel caso di forzanti qualsiasi, si considera la forzante come la sequenza di forze impulsive con valore dell’impulso all’istante τ pari a F (τ )dτ . Dal momento che vale la sovrapposizione degli effetti, la risposta al generico istante t è data da: Z t x(t) = h(t − τ ) F (τ ) dτ (12) 0 L’integrale che consente di determinare la soluzione è detto integrale di Duhamel. Figura 2: Forzante come successione di impulsi elementari Nel caso che le condizioni iniziali fossero diverse dalle naturali sarà necessario aggiungere, sempre applicando la sovrapposizione degli effetti, la soluzione in oscillazioni libere con x(0) = x0 e x(0) ˙ = x˙ 0 : p x˙ 0 + x0 ν ω1 x(t) = √ exp (−νω1 t) sin ω1 1 − ν 2 t + 1 − ν 2 ω1 p Z t 2 h(t − τ ) F (τ ) dτ + x0 exp (−νω1 t) cos ω1 1 − ν t + (13) 0 Nel caso di smorzamento nullo la funzione di risposta all’impulso unitario è: h(t − τ ) = 1 sin (ω1 (t − τ )) mω1 (14) e la (13) diventa: x(t) = 1.4 x˙ 0 1 sin (ω1 t) + x0 cos (ω1 t) + ω1 mω1 Z t sin (ω1 (t − τ )) F (τ ) dτ (15) 0 Esempi Forza costante Si consideri una forza applicata all’istante 0 e poi mantenuta costante per un tempo indefinito. F (t) = F0 3 (16) Figura 3: Andamento della forza con legge F (t) = F0 . Si assume smorzamento nullo, quindi si applica la (15) con condizioni iniziali x0 = 0 e x˙ 0 = 0. Si ottiene: 1 x(t) = mω1 Z 0 t Z t F0 sin (ω1 (t − τ )) F0 dτ = sin (ω1 (t − τ )) dτ = mω1 0 F0 F0 = [cos (ω1 (t − τ )) ]t0 = (1 − cos ω1 t) = xst (1 − cos ω1 t) (17) 2 mω1 mω12 F0 dove si è indicato con xst = lo spostamento che subirebbe la massa se la forza fosse applicata k staticamente. Il moto è rappresentato nella figura seguente: x(t) 2 xst xst 0 0 1T1 2T1 3T1 t Figura 4: Risposta dell’oscillatore elementare ad una forzante costante. Il sistema si muove di moto armonico con ampiezza di oscillazione doppia di quella che si avrebbe se la forza fosse applicata in maniera statica. 4 Forza crescente linearmente Si consideri una forza crescente linearmente da 0 al valore di regime in un intervallo Tc e poi si mantenga costante. F0 t per t ≤ Tc Tc F (t) = (18) F per t > T c Figura 5: Andamento della forza con legge F (t) = F0 /Tc t per t ≤ Tc , F0 per t > Tc . Si ottiene: x(t) = 1 mω1 Z t sin (ω1 (t − τ )) 0 F0 F0 τ dτ = Tc mω1 Tc Z t τ sin (ω1 (t − τ )) dτ (19) 0 integrando per parti si ha: F0 t t 1 T1 x(t) = − sin 2 π k Tc 2 π Tc T1 Le soluzioni per quattro valori di Tc è riportato nella figura seguente: 5 (20) Tc /T1 = 0.30 Tc /T1 = 0.70 Tc /T1 = 2.30 2 xst x(t) Tc /T1 = 4.00 xst 0 0 T1 2T1 4T1 6T1 t Figura 6: Risposta dell’oscillatore elementare ad una forzante linearmente crescente per diversi valori di Tc . Si vede come per Tc T1 le oscillazioni divengono trascurabili, e la forza può con buona approssimazioni considerarsi applicata in maniera quasi-statica anche in assenza di smorzamenti. Si nota come se Tc è multiplo intero di T1 dopo t = Tc il sistema rimanga fermo. Invece per valori di Tc < T1 si ha un effetto dinamico pronunciato per cui il rapporto fra lo spostamento massimo e quello statico xst cresce al diminuire di Tc , fino a che per Tc → 0 si ricade nel caso precedente e tale rapporto vale 2. 6
© Copyright 2026 Paperzz