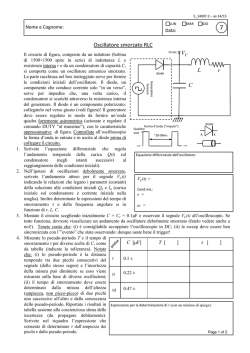
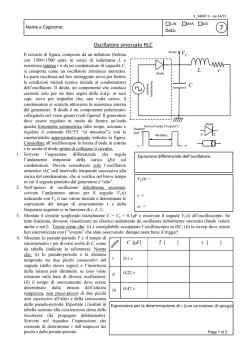
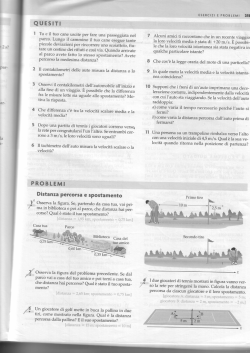
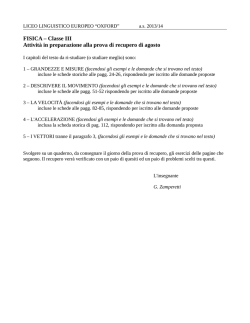
Lezione 4: Sistemi ad un grado di libertà: l’oscillatore elementare (4) Federico Cluni 12 Marzo 2014 1 Risposta sotto forzante qualsiasi Nelle lezioni precedenti si è vista la risposta sotto forzanti tipo seno, coseno e a valore costante. Nel caso di forzante generica F (t) definita per t ∈ [0, T ] la risposta può ottenersi con l’impiego della rappresentazione in serie di Fourier di F (t). In tal caso si assume che la funzione sia periodica di periodo T . La sua rappresentazione in serie di Fourier è la seguente: ∞ F (t) = A0 X [Ah cos (hωt) + Bh sin (hωt)] + 2 (1) h=1 con: Z 2 T F (t)dt T 0 Z 2 T F (t) cos (hωt) dt Ah = T 0 Z 2 T Bh = F (t) sin (hωt) dt T 0 A0 = e: (2) (3) (4) 2π (5) T In sostanza la F (t) viene vista come una sommatoria di funzioni armoniche in cui il periodo 1 della k-esima componente è Tk = T (si veda la figura 1). k ω= 1 Figura 1: Scomposizione della forzante F (t) in serie di Fourier con armoniche di pulsazione crescente. Poiché il sistema è lineare, vale il principio di sovrapposizione per cui l’integrale particolare della soluzione x(t) è data da: ∞ A0 X Ah Bh xP (t) = + fD,h cos (hωt − ψh ) + fD,h sin (hωt − ψh ) 2k k k (6) h=1 con: e hω 2ν ω1 tan ψh = 2 hω 1− ω1 con ψh ∈ [0, π] 1 fD,h = v !2 u 2 2 u hω t 1 − hω 2 + 4ν ω1 ω1 (7) (8) A tale soluzione va aggiunta la soluzione dell’omogenea associata, per cui l’equazione del 2 moto è: p p x(t) = B1 exp (−νω1 t) sin ω1 1 − ν 2 t + B2 exp (−νω1 t) cos ω1 1 − ν 2 t + ( ) ∞ 1 A0 X + + fD,h [Ah cos (hωt − ψh ) + Bh sin (hωt − ψh )] (9) k 2 h=1 Le costanti B1 e B2 si determinano con le condizioni iniziali x(0) = x0 e x(0) ˙ = x˙ 0 : ( ) ∞ 1 A0 X + B2 = x0 − fD,h [Ah cos (−ψh ) + Bh sin (−ψh )] k 2 h=1 ( (∞ )) 1 X 1 x˙ 0 + νω1 B2 − fD,h [−Ah hω sin (−ψh ) + Bh hω cos (−ψh )] B1 = √ k ω1 1 − ν 2 (10) (11) h=1 Si noti che la soluzione può anche essere vista come la sovrapposizione dell’integrale particolare, dato dalla (6), e della soluzione in oscillazioni libere con condizioni al contorno: x(0) = x0 − xP (0) x(0) ˙ = x˙ 0 − x˙ P (0) (12) (13) con: ) ∞ A0 X fD,h [Ah cos (−ψh ) + Bh sin (−ψh )] + 2 h=1 (∞ ) 1 X x˙ P (0) = fD,h [−Ah hω sin (−ψh ) + Bh hω cos (−ψh )] k 1 xP (0) = k ( (14) (15) h=1 dove xP (0) e x˙ P (0) sono la posizione e la velocità iniziale dovuti all’integrale particolare. Si noti inoltre che la (8) fa sì che, delle infinite componenti di Fourier della forzante, saranno particolarmente significative ai fini della risposta principalmente quelle di pulsazione hω prossime alla risonanza, mentre le armoniche ad alte frequenze tendono a divenire sempre meno rilevanti. In pratica l’oscillatore si comporta come se fosse un filtro che fa passare principalmente le componenti con pulsazioni prossime alla propria ω1 . 2 Risposta allo spostamento impresso Vi sono delle situazioni nelle quali l’azione esterna che agisce sull’oscillatore non è una forza ma uno spostamento impresso alla base dell’oscillatore stesso. In tal caso la forza di richiamo elastico esercitata dalla molla dipende dallo spostamento relativo fra massa e base, la forza viscosa dello smorzatore dipende dalla velocità relativa della massa rispetto alla base. L’equazione del moto va comunque scritta con riferimento ad un sistema inerziale F (t). Figura 2: Schema oscillatore elementare per spostamento impresso 3 Si indichino con x(t), x(t) ˙ e x ¨(t) posizione, velocità e accelerazione relativa della massa rispetto alla base. Si indichino con y(t), y(t) ˙ e y¨(t) posizione, velocità e accelerazione relativa della massa rispetto al sistema inerziale. Si indichi inoltre con u(t) lo spostamento impresso alla base. Lo spostamento assoluto della massa (ovvero rispetto al sistema inerziale) vale: y(t) = x(t) + u(t) (16) y¨(t) = x ¨(t) + u ¨(t) (17) m¨ y (t) + cx˙ + kx = 0 (18) m¨ x(t) + cx˙ + kx = −m¨ u(t) (19) e la sua accelerazione assoluta è: L’equazione del moto è quindi: e sostituendo la (17): Come al solito si divide per m e si ottiene: x ¨(t) + 2 nu ω1 x˙ + ω12 x = −¨ u(t) (20) La trattazione si può svolgere quindi come nel caso di forzante esterna, ponendo: F (t) = −¨ u(t) ⇒ F (t) = −m u ¨(t) m (21) L’equazione (20) è di fondamentale importanza nello studio di struttura sottoposte all’azione sismica. 2.1 Strumenti di misura per le vibrazioni In molti aspetti dell’ingegneria è importante poter misurare le vibrazioni di un corpo, si pensi ad esempio alle strutture sottoposte all’azione sismica. Nella sua forma più semplice, gli strumenti utilizzati sono trasduttori costituiti da un oscillatore elementare posto all’interno di un elemento reso solidale al corpo di cui si vogliono misurare le vibrazioni. Si presentano nel seguito le principale applicazioni. Accelerometri Si consideri che il moto del terreno sia rappresentato da: u ¨(t) = u ¨g sin ω t In tal caso la risposta dell’oscillatore, considerando la (20) e la (21), è data da: −m u ¨g F 1 ψ x(t) = fD sin (ωt − ψ) = ¨g sin ω t − fD sin (ωt − ψ) = − 2 fD u k k ω ω1 (22) (23) Quindi lo spostamento subito dall’oscillatore (e registrato dallo strumento) è l’accelerazione ψ imposta alla base, con uno sfasamento temporale di , divisa per ω12 fD . In generale quindi, ω sia lo sfasamento che l’ampiezza dipendono dalla pulsazione dello spostamento impresso, perciò lo spostamento non sarà una rappresentazione fedele dell’accelerazione imposta. Tuttavia, adottando smorzamenti elevati, ad esempio ν = 0.65 ÷ 0.75, si ha che per pulsazioni tali che 0 ≤ ω/ω1 ≤ 0.50 il valore di fD è pressoché costante (variazioni inferiori del 2.5 %), mentre il valore di ψ è pressoché lineare in ω/ω1 , ovvero ψ/ω è indipendente da ω e quindi lo sfasamento 4 temporale è costante. Per cui tutte le componenti armoniche sono scalate della stessa quantità e sfasate dello steso tempo, per cui lo spostamento è una rappresentazione scalata (secondo il fattore ω12 ) e sfasata delle accelerazioni imposte. π/2 ν = 0.65 ν = 0.70 ν = 0.75 1.000 ψ fD 1.025 π/4 ν = 0.65 ν = 0.70 ν = 0.75 0.975 0.950 0.00 0.25 0.50 α 0.75 0 0.00 1.00 (a) Fattore di amplificazione 0.25 0.50 α 0.75 1.00 (b) Sfasamento Figura 3: Fattore di amplificazione e sfasamento. Ovviamente, lo smorzamento elevato riduce anche il transitorio iniziale, per cui si può considerare come tutta la risposta sia in condizioni di regime. Sismografi Si consideri che il moto del terreno sia rappresentato da: u(t) = ug sin ω t (24) u ¨(t) = −ug ω 2 sin ω t (25) si ha quindi: In tal caso la risposta dell’oscillatore, considerando la (20) e la (21), è data da: x(t) = La funzione m ug ω 2 F ω2 fD sin (ωt − ψ) = fD A sin (ωt − ψ) = 2 fD ug sin (ωt − ψ) k k ω1 ω2 fD ha l’andamento riportato in figura: ω12 5 (26) ν ν ν ν ν ν ν 5.00 4.00 α 2 · fD 3.00 = 0.00 = 0.10 = 0.15 = 0.30 = 0.50 = 0.80 = 0.99 2.00 1.00 0.000 0.00 0.50 1.00 1.50 α 2.00 2.50 3.00 Figura 4: Andamento di α2 · fD . Nel caso in cui ω1 sia molto basso allora la funzione tende ad 1 per qualsiasi valore di ν, mentre ψ tende a π. Si ha perciò: x(t) = −ug sin ωt (27) Lo spostamento dell’oscillatore è allora pari allo spostamento imposto al piede cambiato di segno (il che è inessenziale). Si noti come in questo caso non ha importanza lo smorzamento. Si noti che: y(t) = x(t) + u(t) = 0 (28) ovvero la massa tende a rimanere ferma nel sistema di riferimento inerziale. Questo è il principio di funzionamento dei sismografi, che consistono essenzialmente in una massa elevata collegata ad un supporto solidale al terreno da un elemento di bassa rigidezza: le registrazioni dello spostamento della massa forniscono la storia di spostamenti imposti alla base. 6 Figura 5: Sismografo. Si noti come nessuna ipotesi è stata introdotta finora sullo smorzamento, in quanto l’andaω2 mento di 2 fD per α 1 è indipendente da ν. Tuttavia, al fine di smorzare rapidamente le ω1 oscillazioni libere, è comunque opportuno che lo smorzamento sia elevato: ad esempio si può immergere la massa in un fluido molto viscoso, o collegarla direttamente ad un dispositivo con elevato ν. 3 Fattore di amplificazione in termini di accelerazione La funzione α2 · fD è chiamata fattore di amplificazione in termini di accelerazione. Infatti, nel caso l’oscillatore elementare sia soggetto ad una forzante sinusoidale: F (t) = F0 sin ωt (29) la sua risposta è data da: x(t) = F0 fD sin (ωt − ψ) k (30) e la sua accelerazione da: x ¨(t) = − F0 F0 ω 2 fD ω 2 sin (ωt − ψ) = − fD sin (ωt − ψ) k m ω12 (31) Quindi la funzione α2 · fD rappresenta il rapporto (a meno del segno) fra l’accelerazione massima subita dall’oscillatore e quella cui sarebbe sottoposto se la massa fosse isolata (ovvero senza le forze di richiamo elastico e viscosa). 7
© Copyright 2026 Paperzz