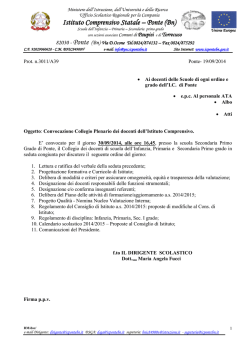
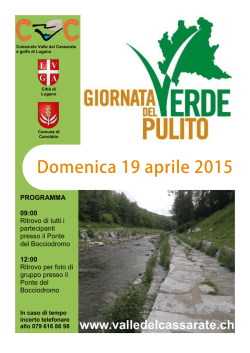
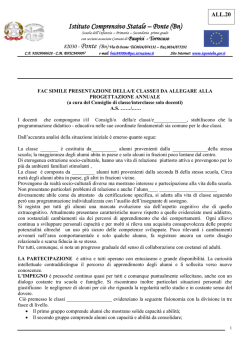
Misure di deformazione con estensimetri elettrici Ricordiamo la relazione tra la variazione di resistenza di un conduttore filiforme e la deformazione longitudinale ad esso applicata: ΔR = kε Mis R 1 Estensimetro Lo strumento più diffuso per le misure di deformazione è l’estensimetro elettrico: esso è composto da una pista conduttiva deposta su un film polimerico polimerico. Indicatori di Supporto polimerico allineamento Direzione di misura Terminali per saldatura cavi La relazione fondamentale dell’estensimetria fornisce la variazione di resistenza di un conduttore filiforme soggetto ad una deformazione longitudinale: ΔR R = kε Mis Se alimentato, l’estensimetro produce una variazione di tensione che può essere facilmente letta da un voltmetro. 2 1 Estensimetro L’estensimetro fornisce una variazione di resistenza proporzionale al valore medio della deformazione nell’area da lui coperta. Def. p picco SI NO Def. effettiva Def. indicata NO Def. effettiva Def. effettiva Def. indicata Def. indicata L’ t L’estensimetro i t d dovrebbe bb essere iinstallato t ll t in i zone a deformazione d f i uniforme: l’effetto di media sulle deformazioni è comunque generalmente contenuto viste le dimensioni contenute del sensore. Un po’ più critico il caso di estensimetri a griglia multipla (rosette) che leggono la deformazione idealmente nello stesso punto ma in direzioni differenti. 3 Estensimetro Esistono in commercio numerosi modelli di estensimetro in grado di incontrare le esigenze delle più varie applicazione. 4 2 Estensimetro 5 Estensimetro I criteri di selezione riguardano: ¾ allungamento massimo; ¾ numero di cicli di deformazione; ¾ temperatura di lavoro; ¾ precisione richiesta. 1600 με > 1000000 80° Moderata 6 3 Misure di deformazione con Ponte di Wheatstone 7 Misure di deformazione L’impiego degli estensimetri nei sistemi di misura di deformazione è normalmente associato al ponte di Wheatstone Wheatstone. Con le convenzioni di figura si ha: ΔV = VS 4 ⎛ ΔR1 ΔR2 ΔR3 ΔR4 ⎞ − + − ⎜ ⎟ R R R ⎠ ⎝ R Ricordando la prima relazione fondamentale dell’estensimetria: ΔR = kε Mis R k strain gauge factor Nel caso comune di impiego di estensimetri uguali si ottiene la seconda relazione fondamentale dell dell’estensimetria estensimetria : ΔV = VS V ( k1ε1 − k2ε 2 + k3ε 3 − k4ε 4 ) = S k (ε1 − ε 2 + ε 3 − ε 4 ) 4 4 8 4 Misure di deformazione Una misura di classico impiego strutturale è quella di una componente di deformazione in un punto di una struttura. Per ottenere questa informazione si utilizza un solo estensimetro e la configurazione a ¼ di ponte. La seconda relazione fondamentale si riduce quindi a: ΔV = VS ⎛ ΔR ⎞ ⎜ ⎟ 4⎝ R ⎠ Con le convenzioni di figura un incremento di resistenza (deformazione di estensione) la variazione è positiva per gli estensimetri 1 e 3. L’estensimetro è sensibile sia alla deformazione meccanica (ε M ) sia a quella termica (ε T ) . ΔV = VS 4 ⎛ ΔR ⎞ VS ⎜ ⎟ = k (ε M + ε T ) ⎝ R ⎠ 4 L’uscita è proporzionale alla tensione di alimentazione. Sarebbe quindi utile alzarla per ottenere un miglior rapporto segnale/rumore. Ci sono dei limiti? 9 Bilanciamento del ponte La seconda relazione fondamentale si ottiene bilanciando il ponte ( R1 R3 = R2 R4): ΔV = VS 4 ⎛ ΔR ⎞ ⎜ ⎟ ⎝ R ⎠ Anche nella discussione delle caratteristiche del ponte si è assunto il ponte bilanciato Cosa succede se non si effettua tale compensazione? 10 5 Bilanciamento del ponte Con la numerazione di figura, l’uscita a ponte scarico è: VO = VS R1 R3 − R2 R4 ( R1 + R4 )( R2 + R3 ) Nominalmente il ponte è bilanciato se R1 R3 = R2 R4. Per resistenze nominalmente uguali da 120 Ω, di tolleranza 0.5%, e p però p arrivare un’alimentazione da 10 V,, lo sbilanciamento di tensione può ad essere dell’ordine di 15 mV. Un valore piccolo, ma non trascurabile rispetto alla misura attesa! La variazione di tensione dovuta alla deformazione di un estensimetro è data da: ΔV = k VS ε3 4 La deformazione corrispondente a tale lettura, con k=2, è di 3000 με : un valore che è prossimo al limite di snervamento di un comune materiale metallico 11 Bilanciamento del ponte Sono possibili due tecniche per ovviare a questo problema: 1) effettuare misure differenziali senza bilanciare preventivamente il ponte; 2) bilanciare preventivamente il ponte ed effettuare una sola lettura diretta della variazione di tensione dovuta alla deformazione. Per discuterli consideriamo il caso di ¼ di ponte con estensimetro in posizione 3. 12 6 Bilanciamento del ponte 1) Ponte non bilanciato VO = VS (misura differenziale) R1R3 − R2 R4 ≠0 ( R1 + R4 )( R2 + R3 ) VO′ = VS R1 ( R3 + ΔR3 ) − R2 R4 ≈ ( R1 + R4 )( R2 + R3 + ΔR3 ) ⎛ ⎞ R1 R3 − R2 R4 R1 R3 kε VS ⎜⎜ + ⎟⎟ ⎝ ( R1 + R4 )( R2 + R3 (1 + kε ) ) ( R1 + R4 )( R2 + R3 (1 + kε ) ) ⎠ VO′ − VO = ⎛ ⎞ R1 R3 − R2 R4 R1 R3 kε R1 R3 − R2 R4 VS ⎜⎜ + − ⎟⎟ ⎝ ( R1 + R4 )( R2 + R3 (1 + kε ) ) ( R1 + R4 )( R2 + R3 (1 + kε ) ) ( R1 + R4 )( R2 + R3 ) ⎠ La rimozione dell’offset non è perfetta a causa della presenza del contributo di deformazione a denominatore del primo termine, invece assente nel terzo. Il legame tra ΔV e ε non è perfettamente lineare, ma nell’ambito delle approssimazioni fatte rimane trascurabile. 13 Bilanciamento del ponte 2) Ponte bilanciato Comportamento C t t puramente t proporzionale i l con lla d deformazione, f i sempre nell’ambito delle approssimazioni fatte: VO = ΔV = k VS ε 4 Bil Bilanciando i d sii evita: it ¾ la lettura di zero; ¾ la misura differenziale; ¾ di impostare il fondoscala di lettura sulla somma dell’offset e del segnale diminuendo la risoluzione (in genere comunque trascurabile dato che lo sbilanciamento è piccolo) piccolo). 14 7 Bilanciamento del ponte Come ottenere il bilanciamento di un ponte per cui R1 R3 ≠ R2 R4 ? La modifica delle resistenze normalmente comporta solo piccole correzioni (es. caso di 4 estensimetri nominalmente uguali ma leggermente diversi per incertezze legate alla realizzazione). Di fatto basta correggere la resistenza di uno solo dei rami del ponte. Occorre quindi scegliere cosa è più conveniente fare: aumentare uno dei due prodotti o diminuire l’altro? Per incrementare una resistenza si aggiunge una resistenza in serie: REquiv = RA + RB Per diminuire una resistenza si aggiunge una resistenza in parallelo: REquiv = RA RB RA + RB 15 Bilanciamento del ponte Supponiamo che sia necessario modificare la resistenza di un ramo di un 1%. Caso della serie. Occorre aggiungere una resistenza 1/100 di quella del ramo (0.01 R): RB = REquiv − RA = 1.01 RA − RA = 0.01 RA Caso del parallelo. Occorre aggiungere una resistenza 99 volte più grossa di quella del ramo (99.0 R): REquiv = RA ⋅ RB = 99Ω RA + RB REquiv ( RA + RB ) = RA RB RB = RA REquiv RA − REquiv = RA 1 RA / REquiv − 1 RB = 99 ⋅ RA 16 8 Centraline estensimetriche 17 Centraline estensimetriche La lettura dei ponti viene spesso effettuata con un sistema di condizionamento e misura specifico: la centralina estensimetrica. La centralina mette a disposizione tutta la componentistica per: ¾ completare un ponte; ¾ alimentarlo; ¾ bilanciarlo; ¾ leggere lo sbilanciamento sotto carico; ¾ fornire la misura in termini di microdeformazioni. Questo per qualsiasi configurazione di ponte (¼ , ½ o ponte intero). 18 9 Approfondimento: effetto dei cavi Nota: per la risoluzione del problema dell’effetto dei cavi si rimanda alle esercitazioni esercitazioni. 19 Effetto dei cavi Configurazione a ponte intero: 4 estensimetri installati Rk2 R1 R2 Rk4 Vo Vi Rk3 R4 R3 Rk1 Effetto della resistenza dei cavi di collegamento 20 10 Effetto dei cavi Configurazione a mezzo ponte: 2 estensimetri installati Rk2 R1 R2 Rk1 Vo Vi R3 R4 Rk3 Effetto della resistenza dei cavi di collegamento 21 Effetto dei cavi Configurazione a quarto di ponte: 1 estensimetro installato Rk2 R1 R2 Rk1 Vo Vi R4 R3 Effetto della resistenza dei cavi di collegamento 22 11 Effetti della temperatura sulle misure con estensimetri elettrici 23 Ponte di Wheatstone: effetti di temperatura Una variazione di temperatura dell’estensimetro genera una variazione: ¾ di lunghezza della griglia estensimetrica: ΔLEst=αEst ΔT LEst ¾ di lunghezza del supporto dell’estensimetro: ΔLPez=αPez ΔT LPez ¾ di resistenza per effetto del cambiamento di resistività del materiale. I primi due termini producono una deformazione meccanica equivalente pari a: ε APP = (α Est − α Pez )ΔT Il terzo una variazione di resistenza pari a: ΔR = L ⎡ ρ(T ) - ρ(TRif ) ⎤ ⎦ A⎣ Variazione del fattore di sensibilità con la temperatura in funzione di materiale 24 della griglia e del supporto. 12 Ponte di Wheatstone: effetti di temperatura La compensazione degli effetti della temperatura, ovvero l’eliminazione della variazione di tensione generata dal calore, può essere fatta con varie modalità: • correzione analitica grazie ad appositi diagrammi (poco utilizzata in ambito sperimentale); • utilizzo combinato di estensimetri di misura i iin un ponte t di Wh Wheatstone t t per una compensazione diretta, peraltro praticabile solo in alcune condizioni che dovranno essere verificate; • annullamento dell’effetto di t temperatura t tramite t it un’apposita ’ it misura (tecnica detta del provino morto), normalmente con un ponte di Wheatstone (sempre utilizzabile). 25 Misure di deformazione: il «morto» Il provino morto è : ¾ costituito da un pezzo di materiale identico a quello del quale si vuole misurare la deformazione; ¾ sottoposto alla stessa temperatura; ¾ strumentato in maniera identica; ¾ ma non caricato. Quindi la sua uscita è: ΔRB = kε B = kε T R Mentre l’uscita dell’estensimetro di misura è: A B ΔRA = kε A = k (ε M + ε T ) R La compensazione deve per differenza di due misure indipendenti di due ponti in configurazione ¼. Può essere preferibile l’utilizzo di un unico ponte di misura. 26 13 Misure di deformazione: compensazione termica La compensazione termica può avvenire inserendo il morto su un ramo del ponte adiacente a quello dell’estensimetro di misura. In questo modo si realizza direttamente la compensazione sfruttando le proprietà del ponte. ΔR ΔR ΔR ΔR 1 R 2 R 1 = kε1 R = kε 4 2 R = 3 R =0 L’uscita del ponte diventa: ΔV = R4 ep poiché: si ottiene un’uscita sensibile solo all’effetto meccanico: 4 ΔV = VS ⎛ ΔR1 ΔR2 ΔR3 ΔR4 ⎞ − + − ⎜ ⎟= R R R ⎠ 4⎝ R VS ⎛ ΔR1 ΔR4 ⎞ − ⎜ ⎟ R ⎠ 4⎝ R ε1 = ε M + ε T ε 4 = εT VS V k ( ε1 − ε 2 ) = S kε M 4 4 27 Configurazioni tipiche di impiego di estensimetri elettrici 28 14 Configurazioni tipiche Un estensimetro collegato ad ¼ di ponte misura la deformazione in un punto di una struttura, secondo una direzione. In alcuni casi però risulta di particolare utilità riuscire ad individuare nella deformazione generica presente in un punto il contributo dovuto ad una singola modalità meccanica di sollecitazione, tralasciando gli effetti di altre modalità di sollecitazione: il caso tipico è la separazione tra gli effetti di carichi assiali, di flessione e termici. L’interesse è q quindi p per una configurazione g di misura che compensi p intrinsecamente gli effetti non desiderati ed eventualmente amplifichi quelli a cui si è interessati. 29 Configurazioni tipiche Nel caso di una struttura allungata prende significato la separazione tra effetti di carichi assiali, assiali di flessione e termici. Un carico longitudinale produce: ¾ effetti uniformi nella sezione (modalità membranale); ¾ effetti linearmente variabili attraverso lo spessore della sezione i quando d non allineato lli t con l’asse l’ neutro t della d ll trave (modalità flessionale). Può, in generale, essere presente anche una deformazione termica (non necessariamente uniforme sulla sezione sebbene per i metalli lo sia). 1l Contributi : L interesse è per configurazioni di misura , di volta in volta, • Termico L’interesse che compensino intrinsecamente gli effetti non • Membranale desiderati e mettano in evidenza il solo effetto • Flessionale desiderato. 30 15 Configurazioni tipiche: carico assiale Misura della deformazione assiale con un solo estensimetro in configurazione quarto di ponte. Contributi possibili: • Termico • Membranale • Flessionale 1l ΔV ¾ L’uscita del ponte è: ΔV = ¾ La sensibilità del ponte è: VS V ( kε1 + 0 + 0 + 0 ) = ⎛⎜ S 4 ⎝ 4 k ⎛V ⎞ S = ⎜ S k ⎟o SV = 4 ⎝ 4 ⎠ ¾ Cosa misura l’estensimetro? l estensimetro? ⎞ k ⎟ ε1 ⎠ ε Mis = ε1 = ε Ass + ε Fles + ε Term Quindi la misura risente di un’eventuale flessione e degli effetti termici. 31 Configurazioni tipiche: carico assiale Misura della deformazione assiale con due estensimetri uguali su facce opposte e collegati su rami opposti (mezzo ponte, es. 1 e 4). Contributi possibili: • Termico • Membranale • Flessionale ΔV 4 ¾ L’uscita L’ i d dell ponte è è: 4l VS V k ( ε1 + ε 4 ) = S kε Mis 4 4 k ⎛V ⎞ SV = S =⎜ S k⎟ o 2 ⎝ 2 ⎠ ΔV = ¾ La sensibilità del ponte raddoppia: ¾ Cosa misurano gli estensimetri? 1l ε Mis Mi = ε 1 + ε 4 = ε 1− A + ε 1-F 1 F + ε 1-T 1 T + ε 2 − A + ε 2-F 2 F + ε 2-T 2 T = 2 (ε A + εT ) Lo sforzo flessionale cambia segno tra le due facce, le componenti di deformazione corrispondenti si elidono nella somma. La misura è compensata a flessione ma risente ancora di eventuali effetti termici. 32 16 Configurazioni tipiche: carico assiale Misura della deformazione assiale con quattro estensimetri uguali, due per ciascuna faccia, uno allineato con la direzione di carico e uno in direzione trasversale. Collegamento a ponte intero, gli estensimetri posti su di una faccia devono essere sui lati adiacenti del ponte. 1l,2t 4l,3t 4 ΔV 3 4 VS V ΔV = k ( ε1 + ε 4 − ε 2 − ε 3 ) = S kε Mis 4 4 ¾ L’uscita del ponte è: ¾ Esaminiamo le misure degli estensimetri: ε1 = (ε Ass + ε Fles ) + α Long ΔT ε 2 = −ν (ε Ass + ε Fles ) + αTrasv ΔT ε 4 = (ε Ass − ε Fles ) + α Long ΔT ε 3 = −ν (ε Ass − ε Fles ) + α Trasv ΔT 33 Configurazioni tipiche: carico assiale Misura della deformazione assiale con ponte intero. 1l,2t 4l,3t ΔV 4 3 ¾ La componente flessionale è compensata compensata, come nel caso precedente precedente. ¾ La deformazione misurata vede compensarsi gli effetti termici, se il coefficiente di dilatazione termica è isotropo: α =α Long Trasv ¾ La sensibilità è aumentata della componente trasversale della deformazione: ε = ε + ε − ε − ε = 2(1 +ν )ε Mis 1 4 2 A 3 ¾ La sensibilità del ponte diventa: S = 2(1 + ν )VS k 4 o SV = (1 + ν ) k 2 34 17 Configurazioni tipiche: carico flessionale Misura della sola componente flessionale della deformazione. Il problema è misurare solo la componente flessionale della deformazione, evitando il contributo di una eventuale deformazione assiale o di una dilatazione termica. Andamento momento flettente Deformazioni possibili: • Termica • Membranale • Flessionale braccio Attenzione: si misura la componente flessionale della deformazione proporzionale al momento flettente indotto dalla forza N ma NON la forza (a meno di conoscere con certezza il braccio). 35 Configurazioni tipiche: carico flessionale Misura della deformazione flessionale con due estensimetri uguali su facce opposte e collegati al ponte su rami adiacenti (mezzo ponte, es.1 e 2). 1l 2l ΔV 2 VS V k ( ε1 − ε 2 ) = S kε Mis 4 4 ¾ La componente flessionale cambia segno ε 2-F = −ε 1-Fe raddoppia. ¾ L’uscita L’ i d dell ponte è è: ΔV = ¾ Le componenti membranale e termica sono uguali e si annullano: ε Mis = ε1 − ε 2 = ε1− A + ε 1-F + ε 1-T − ε 2− A − ε 2-F − ε 2-T = 2ε F quindi la misura è compensata alla deformazione assiale e agli eventuali effetti termici. ⎛ VS ⎞ o k⎟ ⎝ 2 ⎠ ¾ La sensibilità del ponte è: S = ⎜ SV = k 2 36 18 Altre necessità di misura Necessità di caratterizzazione completa dello stato di deformazione superficiale γ xy εy εx Necessità di rilevamento di effetti di scorrimento 37 Estensimetro Un singolo estensimetro misura una deformazione longitudinale p in direzioni diverse consentono la ricostruzione completa p Misure multiple dello stato di deformazione superficiale mediante l’utilizzo delle relazioni di cambiamento di sistema di riferimento o il cerchio di Mohr ε x ′ = ε x cos 2 θ + ε y sin 2 θ + γ xy sin θ cosθ y′; ε y ′ ε y ′ = ε x sin 2 θ + ε y cos 2 θ − γ xy sin θ cosθ εyy12 ; ε P 2 γ x ′y ′ = 2(ε x − ε y )sin θ cosθ + γ xy (cos θ − sin θ ) 2 2 Evitando i termini trigonometrici quadratici: ε x ′ = 12 (ε x + ε y ) + 12 (ε x − ε y )cos 2θ + 12 γ xy sin 2θ x′; ε x ′ θ xP ; ε 1 ε y ′ = 12 (ε x + ε y ) − 12 (ε x − ε y )cos 2θ − 12 γ xy sin 2θ γ x ′y ′ = −(ε x − ε y ))sin 2θ + γ xy cos 2θ Date le deformazioni in tre direzioni note, è possibile risalire alle deformazioni principali e alla loro direzione: essendo lo scorrimento nel riferimento delle deformazioni principali nullo, abbiamo un sistema di 3 equazioni in 3 incognite (deformazioni principali e angolo) 38 19 Misura della deformazione a scorrimento Possiamo risalire alla componente di scorrimento a partire da due misure di deformazione lineare rilevate a ±45° rispetto alla direzione di applicazione del taglio In presenza di uno stato di deformazione di puro scorrimento, in una direzione a 45° avremo deformazioni lineari uguali ed opposte: ε x = −ε y Quindi γ xy = 0 cos(2θ ) = 1.0;sin(2θ ) = 0.0 ε x ′ = 12 (ε x + ε y ) + 12 (ε x − ε y )cos 2θ + 12 γ xy sin 2θ = 0.5(ε x + ε y ) ≈ 0 ε y ′ = 12 (ε x + ε y ) − 12 (ε x − ε y )cos 2θ − 12 γ xy sin 2θ = 0.5(ε x + ε y ) ≈ 0 γ x ′y ′ = −(ε x − ε y )sin 2θ + γ xy cos 2θ = −(ε x − ε y ) ≈ −2ε x Dovendo operare una differenza delle due deformazioni immediato ricorrere ad un ponte: utilizzando 4 stensimetri accoppiati: griglie in direzione x su due rami opposti e griglie in direzione y sugli altri due 39 Misure di deformazione Facciamo il modello generalizzato dell’estensimetro 40 20 Misure di deformazione Facciamo il modello generalizzato dell’estensimetro M d ll di resistenza Modello i t variabile: i bil Δt, α Est , α Str ε ΔR Estensimetro ROut = (1+ k ε) R Modello di sbilanciamento del ponte: ε Δt, α Est , α Str Estensimetro ΔR Alimentatore Ponte VOut = GkVS ε Bilanciamento La sensibilità dello strumento dipende dalla tensione di alimentazione. Sensibilità tra deformazione e tensione: può essere opportuno risalire alla causa della deformazione attraverso il legame forza-deformazione. 41 Approfondimenti: misura completa dello stato di deformazione piano 42 21 Rosetta «Delta» (120°) Date le misure di 3 deformazioni lineari in direzioni a 120° una dall’altra è possibile determinare le deformazioni principali e la loro direzione Sia θ l’angolo tra la direzione principale 1 e la direzione di misura della deformazione A Le deformazioni nelle direzioni di misura possono essere espresse in funzione di quelle principali e della direzione 1 ε A = 12 (ε1 + ε 2 ) + 12 (ε1 − ε 2 )cos 2θ ε B = 12 (ε1 + ε 2 ) + 12 (ε1 − ε 2 )cos 2(θ + 120°) θ ε C = 12 (ε1 + ε 2 ) + 12 (ε1 − ε 2 )cos 2(θ + 240°) Il sistema può essere risolto rispetto a ε1 , ε 2 e θ : ε +ε +ε ε1 , ε 2 = A B C ± (ε A − ε B ) 2 + (ε B − ε C ) 2 + (ε C − ε A ) 2 3 ⎛ 1 (ε C − ε B ) ⎞ θ = tan −1 ⎜ 3 ⎟ 2 2ε A − ε B − ε C ⎠ ⎝ 43 Rosetta rettangolare (45°) Lo stesso procedimento può essere applicato alle misure di una rosetta rettangolare, nella quale le misure laterali sono orientate a ±45° rispetto a quella centrale Sempre indicando con θ l’angolo tra la direzione principale 1 e la direzione di misura della deformazione A, le deformazioni nelle direzioni di misura possono essere espresse in funzione di quelle principali e della direzione 1 ε A = 12 (ε1 + ε 2 ) + 12 (ε1 − ε 2 )cos 2θ ε B = 12 (ε1 + ε 2 ) + 12 (ε1 − ε 2 )cos 2(θ + 45°) ε C = 12 (ε1 + ε 2 ) + 12 (ε1 − ε 2 )cos 2(θ + 90°) θ Anche in questo caso il sistema può essere risolto rispetto a ε1 , ε 2 e θ A voi determinare le relazioni risolutive 44 22 Misura sforzi principali Con misure multiple è possibile determinare le deformazioni nelle direzioni principali Nel caso di comportamento elastico lineare, le direzioni degli sforzi e delle deformazioni principali coincidono, quindi gli sforzi principali possono essere determinati, nota la relazione costitutiva del materiale, a partire dalle deformazioni principali: E σ1 = (ε1 + υε 2 ) 1−υ2 E σ2 = (ε 2 + υε1 ) 1−υ2 Nel caso della misura di scorrimento lo sforzo di taglio può essere calcolato come: τ = Gγ 45 23
© Copyright 2026 Paperzz