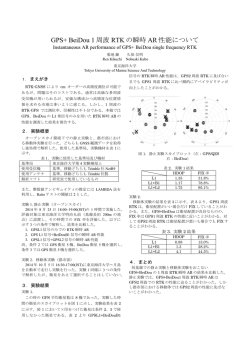
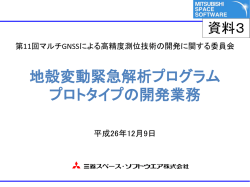
複数GNSS対応単独搬送波位相測位(PPP)技術 の研究開発状況 平成26年4月25日 宇宙航空研究開発機構 衛星測位システム技術室 三吉 基之 1 • 目次 (1)複数GNSS対応単独搬送波位相測位(PPP)技術の研 究開発状況 ・PPP実験システム概要 ・PPP精度、初期収束性確認結果 ・今後の研究開発計画 (2)リアルタイム補強情報のインタネット配信 2 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 単独搬送波位相測位(PPP) 軌道/時計 精密暦 ~3cm/~0.1ns 電離層 2周波線形結合 ~0.5 cm? 雑音+マルチパス 搬送波位相 0.3~1 cm 対流圏 モデル+推定 ~0.5 cm 測位精度 1cm~数cm 出典:GPS/GNSSシンポジウム2007チュートリアル、高須 3 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 単独搬送波位相測位(PPP)の高度化実験 • 複数GNSS時代 • アジア・オセアニア地域での利用 • 精密測位技術の動向:基準局が必要なRTK ⇒基準局が不要なPPP 複数GNSS(GPS,GLONASS,Galileo,QZSS)に対応したネッ トワークモニタ局網(MGM-net)の構築及び軌道・時刻を高 精度に推定するツール(MADOCA)を整備し、地上基準点に よらず、センチメートル級の測位を行う研究開発を推進 4 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 単独搬送波位相測位(PPP)高度化実験 システム概要 複数GNSS “みちびき” 補強情報(軌道・時刻オフセット情報等)を “みちびき”のLEX信号より配信 観測データ モニタ局ネットワーク (MGM‐net等) RTCM SSR LEX信号(メッセージタイプ=12) 追管局 (沖縄) NTRIP キャスタ 軌道・時刻推定機能 補強情報配信 平成25年4月~ GPS,QZSS 平成25年11月~ GPS,QZSS,GLONASS PPPユーザ LEXメッセージ 生成機能 LEX メッセージ 目標精度: 水平10cm(RMS) 垂直10cm(RMS) Multi-GNSS実証実験 MCS LEX メッセージ MADOCA(高精度軌道・時刻推定ツール) MGM-net (Multi-GNSS Monitoring Network):JAXAで整備を進めている複数GNSSに対応したモニタ局ネットワーク NTRIP(Networked Transport of Rtcm via Internet Protocol):観測データ等をリアルタイムで伝送するためのプロトコル MADOCA(Multi-GNSS Advanced Demonstration tool for Orbit and Clock Analysis):複数GNSSに対応した高精度軌道・時刻推定ツール 5 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 複数GNSS対応ネットワークモニタ局網(MGM-net)構築状況(H26.4現在) MGM-net観測局(JAXA保有受信機のホスティング局) MGM-net観測局(参加機関所有受信機を使用) 13局(設置済み) 7局(設置済み) 個別協定によるデータ共有(MGM-net公開) 40局(設置済み) 個別協定によるデータ共有(MGM-net非公開) 10局(設置済み) JAXA観測局 10局(設置済み) 合計 13局 (工事中) 設置済み 80局、 工事中13局 6 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 放送するLEXメッセージタイプ:12 RTCMメッセージ RTCM Message #1 Message Length Preamble Reserved (8bits) (6bits) (10bits) RTCM Message #2 Variable Length Data Message (可変長) CRC Preamble Reserved (24bits) (8bits) (6bits) Message Length (10bits) RTCM Message #N Variable Length Data Message (可変長) Preamble Reserved CRC ・・・・ (24bits) (8bits) (6bits) Message Length (10bits) Variable Length Data Message (可変長) CRC (24bits) LEXメッセージ ヘッダ部 TOW WN SSR Packet #1 (可変長) (49bits) SSR Packet #2 (可変長) ・・・・ SSR Packet #N (可変長) 予備 データ部(1695bits) リードソロモン 符号 (詳細) IS-QZSS ver1.6ドラフト参照 (256bits) LEXメッセージ (2000bits) RTCMメッセージとLEXメッセージの関係 LEXメッセージタイプ12で放送するSSRメッセージ一覧 (*: ドラフト) SSR Packet Message Number Update Interval GLONASS GPS QZSS Galileo Orbit Correction 1057 1246 * 1240 * 1063 30sec Satellite Code Bias 1059 1248 * 1242 * 1065 3hour URA 1061 1250 * 1244 * 1067 30sec High Rate Clock Correction 1062 1251 * 1245 * 1068 2sec 7 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 後処理PPP精度確認結果 2013/1/13~1/20の8日間における「みちびき」の可視範囲にある15局について、IGS観測局89局の観測データから MADOCAにより後処理生成した軌道・クロック情報を用いて後処理PPP解析を実施した結果、評価を行った全15局で目 標精度を達成、リアルタイム処理でも目標値を満足できる目途が得られた。 (15局平均で水平方向3.8cm、垂直方向5.6cm) 2013/1/13~2013/1/20の8日間の真値との RMS値 8 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 リアルタイム軌道推定結果(GPS) 搬送波位相のアンビギュイティをFixして軌道推定 GPS暦比較結果(MADOCA暦-IGS公開暦) (2014.4.13-2014.4.19) GPS暦比較結果(MADOCA暦-IGS公開暦) (2013.9.8-2013.9.10) 9 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 リアルタイム軌道推定結果(GLONASS) GLONASS暦比較結果(MADOCA暦-IGS公開暦) (2014.4.19) GLONASS暦比較結果(MADOCA暦-IGS公開暦) (2014.4.20) 10 リアルタイムPPP精度確認 リアルタイム軌道推定使用モニタ局(IGS局含む)及びPPP評価対象局 シンガポール(NTUS0) (低緯度地域) 増田(GMSD0) (種子島) パルマ(LPAL0) (高高度地域) ・評価期間:2014/04/16~2014/04/21(6Days) ・真値算出:IGS最終暦によるPPP-Static(2014/04/03)の平均値 ・補正値:MADOCAが生成した軌道クロック(RTCM SSR) 11 リアルタイムPPP精度確認 パルマ(LPAL0) シンガポール(NTUS0) 使用衛星数 (0~20) 東西方向誤差 (-0.5m ~ +0.5m) 南北方向誤差 (-0.5m ~ +0.5m) 垂直方向誤差 (-0.5m ~ +0.5m) GPS+GLO GPS 2days 増田(GMSD0) GPS+GLO GPS 2days GPS+GLO GPS 比較的安定している後半48時間でのRMS値 2days RMS (cm) XY / UD GPS GPS+GLO LPAL0 10.9 / 12.6 7.8 / 11.1 NTUS0 16.6 / 10.2 13.8 / 11.2 GMSD0 19.3 / 19.9 13.6 / 12.8 ・リアルタイムで10cm級の精度を達成 ・今後更なる精度向上(10cm以内)を目指す 12 リアルタイムPPP初期収束性確認 2014/04/16~2014/04/21のうち、十数回に分けて測位演算を実施。 GPS+GLO GPS GPS+GLO GPS GPS+GLO GPS 30min Time (min) 20cm 10cm GPS+GLO GPS U/D Error (m) GPS+GLO GPS U/D Error (m) U/D Error (m) GPS+GLO GPS XY Error (m) 増田(GMSD0) XY Error (m) シンガポール(NTUS0) XY Error (m) パルマ(LPAL0) 30min Time (min) 20cm 10cm 30min Time (min) ・測位にGLONASSを使用すること(マルチGNSS化)で収束性が良好になることを確認 ・GPS+GLOでは処理開始から20~30分程度で概ね20cm以内には収まることを確認 ・今後は同様の評価を重ねるとともに収束時間短縮にむけた検討(後述) 13 複数GNSS対応単独搬送波位相測位(PPP)技術の研究開発 今後の研究開発計画(FY25-FY27): 1. MADOCAの維持・改善 – 2. 3. 軌道・時刻推定機能(GPS, GLONASS, Galileo, QZSS)の チューニング等、安定性の向上 – 軌道・時刻推定機能の対象GNSSの拡大(BEIDOU後処理) 精度向上:PPP-AR技術の導入(目標:水平1cm垂直3cmRMS) – 補強情報生成機能の拡張 – L1-L2、L1-L5、L1-L2-L5対応 – ユーザ測位ツール(RTKLIB)のPPP-AR対応 初期収束時間短縮:30分程度(現状)→1分(目標) – ローカルな電離層遅延および対流圏遅延情報を用いた初期収束 時間の短縮 4. シームレスPPP補強 – 地上補助情報、車載センサー情報との組み合わせにより、PPP による精密測位の信頼性向上に向けた研究 本研究で得られた成果をユーザと連携し実証実験を進 めていきたい。 14 リアルタイム補強情報のインタネット配信について -MADOCAにより生成したリアルタイム補強情報を RTCM SSRフォーマットで配信予定。 ・配信対象GNSS : GPS, GLONASS, QZSS ・配信時期 : 2014年夏頃を予定 -利用条件(整理中) -利用したい場合、申請要 ・利用者にID,パスワードを付与 -利用目的は、平和目的、非商用に限る。 -24時間のデータ提供、精度保障はしない。 ・メンテナンス等によりデータ提供が止まる場合あり -成果の共有 ・本データを使用して成果を発表する際、JAXAが提供するリアルタイム 補強情報を利用等を明記など。 準備が整い次第、QZ-VISION(http://qz-vision.jaxa.jp/)上で 周知予定。 15
© Copyright 2026 Paperzz