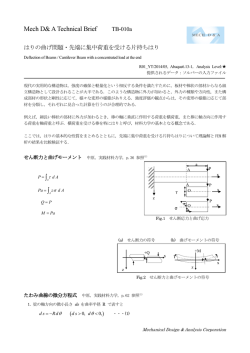
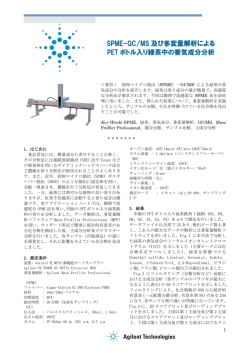
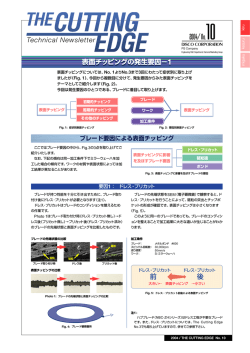
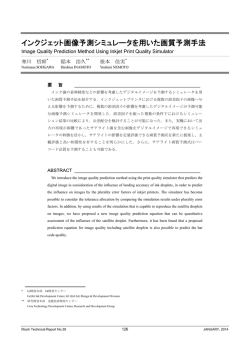
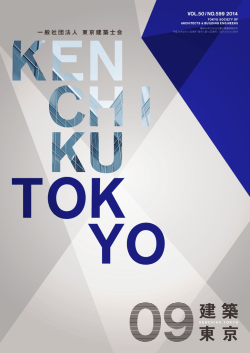
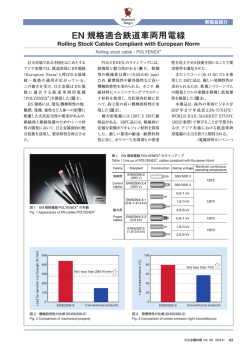
固有直交分解を用いたクラスタリングによる 翼型形状最適化結果の詳細分析 飯田 大貴設計情報抽出 , 大山 聖 ,藤井 孝蔵 † † † † † 東京大学大学院† ,宇宙科学研究所† † い 1. はじめに 多目的最適設計探査は,多目的設計最適化により得 られた非劣解もしくは実行可能解を自己組織化マップ (Self Organizing Map, SOM),分散分析(Analysis Of VAriance, ANOVA) [1]等のデータ マ イ ニ ン グ 手 法 や 散 布 図 行 列 (Scattered Plot Matrix, SPM)[2]などのデー タ可視化手法を用いて分析することにより,設計に有 益な情報を引き出す手法である. 空力形状を最適化する例として,翼の形状を最適化 する問題がある.その場合,空力性能に関する指標を 目的関数として評価することが多い.そのため,揚力 の指標である揚力係数(C l)と抗力の指標である抗力係 数(C d) を目的関数として,C l を最大にしC d を最小に するような多目的最適化がよく行われる.C l ,C d は, B-Spline等で翼形状を再現し(Fig. 1),数値流体力学等で 流れ場を計算することで得られる. Fig. 1 B-Spline曲線で表現した翼型とB-Splineの6つ の制御点 [5] Precise Analysis of Pareto-Optimal solutions using POD through clustering † Hiroki Iida([email protected]) † † Akira Oyama([email protected]) † † Kozo Fujii([email protected])‡ Graduated School of University of Tokyo(† ) Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency († † ) このような空力形状最適化においては,文献[1]や文 献[2]等で目的関数や設計変数の関係を把握する分析が 行われていた.しかし,設計変数が直接形状を現して いないため,形状変化と流れ場や性能の変化を把握す るには,分かりにくいということが問題となっていた. そのため,形状自身を分析する必要があると考えられ る.さらに,流れ現象のC l やC d への影響を分析する ためには,流れ場を分析する必要もある. そのため,従来はこのようなデータの分析に対して は,設計者が膨大な数の形状データや流れ場データを 逐一確認しながら行っていた.しかしながら,分析に 時間がかかる場合や不可能である場合がある.また, 設計者による分析は文献[3]でも行われているように, 確認したデータを観察者の主観によりクラスタリング し,その代表翼型について流体現象を示すことで,分 析を行っている場合が多く,その類似性の確認は視覚 的に行われることが殆どであった. そこで,文献[4]では,非劣解を上下面のy/c座標であ る形状データ(Fig. 3,Fig. 5)に対してk-means法やSOM などでクラスタリングを行うことで,設計者が従来行 っていたクラスタリングに近いクラスタリングを機械 的に出来ることを示した.また,形状データを用いる ことで,設計変数の類似ではなく,形状の類似がクラ スタを形成しているという根拠を与えた.しかし,ク ラスタリングアルゴリズムによって違いがある点,ク ラスタの個数についての根拠に乏しい点,各クラスタ がどのような基準でクラスタを形成しているのか分か らないといった点に問題があった. 一方,設計変数と目的関数以外のデータ(形状やデ ータや流れ場データ)の分析手法として固有直交分解 (Proper Orthogonal Decomposition, POD)が大山[5]によっ て提案された. PODによる非劣解の分析方法は,非劣解の形 状 お よ び 流 れ 場 デ ー タにPODを用いて直交固有モード に分解することで,非劣解の変化の主要なモードの可 視化と主要なモードの係数変化から,設計に有用な知 見を抽出する手法である. しかしながら,実問題では異なる特徴を持つ複数の 解グループが非劣解群を構成している場合があるため, 非劣解群の間で形状や流れ場に大きな変化があり,小 さな形状変化が流れ場や性能のトレードオフ変化に大 きな変化がある場合に,全非劣解データでPODを行っ た場合,その変化についての知見抽出が出来ない可能 性があった. そこで本論文では,上記のSOMやk-means法クラスタ リングについての問題を解決するクラスタリング手法 を提案する.クラスタリング手法についてはPOD基底 の係数の変化傾向が変化する点や不連続に変化する点 で分割を行うものである. さらに,クラスタリングを行った後にPODを行うこ とで全非劣解に対してPODを行った場合に,抽出でき なかった知見が抽出できる点を示す.その特徴は,POD の対象にするデータを類似したものにすることによっ て,小さな形状変化や流れ場変化を捉え易くしたこと である.本論文では,火星飛行機翼最適化結果に適用 して,その有効性を示す. 2. PODについて 本論文では,火星飛行機翼型最適化よって得られ た非劣解に対して,Sirovichが提案したsnapshot POD[6] を用いている.snapshotPODはPODの一種で,大規模固 有値問題に対して小規模固有値問題で固有値問題を代 替し,少ない計算コストで基底や固有ベクトルを算出 する方法である.PODに用いるデータは,通常ある解 と全解の平均ベクトルの差である.残差ベクトルを用 いるが,文献[5]や本論文では,ある解とL/D max の差 で作られる残差ベクトルを用いた.POD基底やその係 数の算出方法は以下のとおりである. ある解のデータベクトルをq(n),L/D max のデータベ クトルをql/dmax,残差ベクトルをq’(n)とすると,残差ベ クトルは式(1)から算出される. 4(1) 残差ベクトルは,式(2)のように基底ベクトル q’base(n)で分解される (1,1) (1, m max) qbase qbase q(1, n) q (2,1) q (2, m max) q(2, n) base base (2) am max (n) a1 (n) q ( j max 1 , 1 ) q ( j max 1 , m max) q ( j max 1 , n ) base base qbase qbase q( j max, n) ( j max,1) ( j max, m max) ここでa m (n)は,式(3)を最大にするように決定され, それは式(4)の共分散行列の固有値問題を解くことで得 ることが出来る. j max q j 1 2 base ( j , m) m = 1, 2, . . . , mmax S1,1 S 1, m 2 S 1, m max S m1,1 S m1, m 2 S m1, m max S m max,1 S m max,m 2 (4) S m max,m max ここで, S m1,m 2 j max q( j, m1)q( j, m2) (5) j 1 である. PODを用いたクラスタリング 今回,クラスタリングにPODの各モードの係数変化 を用いた.本手法のアイディアは,形状や流れ場が大 きく変化する,もしくはある解から異なった変化をし 始める場合に,主要な基底ベクトルの係数が不連続に おきる,または変化の傾向が変わるということが発生 すると予想されるため,係数の変化が不連続に発生す る場合や変化の傾向が変わる解をクラスタの基準点と して用いることが出来るという点にある. 例えばFig. 2は,文献[5]で行われた遷音速翼型の最適 化結果に対して,Fig. 3に示すような形状データに対し てPOD解析を行った結果であり,モード1,2の係数の変 化を表している.文献[5]では,Fig. 2のように揚力や抗 力のような空力的な観点を用いて3つのクラスタに分 けているが,これらが結果的にモード1,2の変化傾向 の変化する点や不連続に変化している点で分割されて いることが分かる.そのため,このようなモードの係 数の不連続や傾向が変化する点でクラスタリングを行 うことで,類似形状や変化傾向が一定の形状をクラス タリングする. モード2の変化 傾向が変化 モード1が不 連続に変化 (3) Fig. 2 遷音速翼型の形状データに適用したPOD結果 の各モードの係数の変化(nが大きくなるとCl上 昇)[3] 4. PODによる分析結果 Fig. 3 遷音速翼型の形状データ(PODにはこのy座標 を用いている)[3] この手法を用いた理由として,5章で示すように,既 存のクラスタリングよりもより物理的に正しい分割が 出来ると共に,全非劣解のデータにPODを施した結果 が各クラスタに意味を付与するという点が挙げられる. この最適化結果の非劣解202個の形状データ(Fig. 5の 下面1001点,上面1000点のy座標)とCp分布(Fig. 6のよう な翼面上の圧力の指標)に対してPOD解析を行った.基 準形状はL/Dmaxを用い,Clの小さい順に解を並べ,抗力 最小解をn = 1,揚力最大解をn = 202とした.結果は以 下のとおりである.Table 1は,エネルギー比率の大き い順にモードを並べたものである.Table 1より,形状 変化についてはモード1のみで90%以上となり,Cp分布 の変化については,モード2までで90%を超える.その ため,形状についてはモード1 まで,Cp分布について はモード2までを観察する. 3. 火星飛行機翼型最適化結果 現在,新しい火星探査の形態として,飛行機による 探査が提案され,ISAS/JAXAと複数の大学が連携し, 検討が進められている[6].この検討の一環として,火 Fig. 5 火星飛行機翼型の形状データ 星探査飛行機用の翼型の多目的最適化が行われた.多 目的最適化した火星探査飛行機翼型は以下の多目的空 力形状最適化問題を解くことで得られた翼型である. 目的関数: 揚力係数C l (最大化) 抗力係数C d (最小化) 制約条件: 揚力係数C l > 0 最大翼厚比t/c ≤ 0.10 設計変数: 翼型を表現するB-Splineの 6つの制御点の(x,y)座標(Fig. 1) 流れ場条件: 一様流マッハ数0.2, Fig. 6 火星飛行機翼型のCp分布 迎角3度,レイノルズ数2.3 × 10 4 この問題の特徴は,レイノルズ数が低く,流れが翼 Table 1 全非劣解にPODを行った場合の各モードの から剥離しやすいため,遷音速翼型とは異なった流れ エネルギー比率 場になることである.Fig. 4に解析する非劣解を示す. Mode1 Mode2 Mode3 Mode4 火星航空機翼型の多目的空力形状最適化問題で得られ 98.8% 0.56% 0.34% 0.11% 形状 た非劣解の数は202個であった.詳細は文献 [3]で述べ 89.0% 6.86% 1.89% 1.35% Cp分布 られている. (a) 形状 Fig. 4 解析する非劣解 (b) Cp分布 Fig. 7 全非劣解にPODを行った場合の各モードの係 数 (a) 形状 (b) Cp分布 Fig. 8 L/Dmaxの形状と全非劣解にPODを行った場合 の各モードの基底ベクトル Fig. 7は各モードの係数の変化を表している.Fig. 8 は基準としたL/Dmaxの形状,Cp分布と観察対象にしたモ ードの基底ベクトルを示している.Fig. 7より,モード 1について形状,Cp分布ともにnの増加に伴って係数が 大きくなることが分かる.これに加えて,Fig. 8の各モ ードの特性を考慮すると,キャンバが強くなることに よって,下面に広く高圧領域を形成することと上面に 広い低圧領域を形成することで,ClCdが上昇するとい った大きな変化しか捉えられていないことが分かる. 5. PODによるクラスタリング そこで類似データをクラスタリングし,POD分析の 対象とするデータを減らし,より小さな形状,Cp分布 の変化を抽出する.そのために本章では,クラスタリ ング方法の比較検討を行う. 文献[4]では,佐々木らが,現在火星飛行機翼型の候 補として挙げられている石井翼を基準にした分節と Cl=1を基準とした分節を行い,その大きな3つのクラス タ内を逐一データを確認し全8つのクラスタに分割し ている.今回は形状,あるいは流れ場の変化を対象と するため,石井翼による基準とCl=1による基準を除く. その結果をFig. 9に示す.全6つのクラスタに分けてい ることが分かる.Fig. 12に黄色のクラスタの解の形状, Cp分布をFig. 13に黄緑色のクラスタの解の形状,Cp分 布を示す. Fig. 12,Fig. 13には,従来用いられているL2ノルムを 用いたk-means法とSilhouette幅によるクラスタリング 結果を示す.これより,k-means法とSilhouetteは幅によ るクラスタリングはこの分類を捕らえることが出来て いないことがわかる. 一方Fig. 14,Fig. 15では, 形状とCp分布のPODのモ ードの係数の不連続面や係数の変化点で分節を行った. 変化の影響力を鑑みて,10%以上のエネルギー比率を 持つモードをクラスタリング対象のモードとした.そ して,10%以上のエネルギー比率を持つモードの不連 続な点で分節し,その分節の共通部分でクラスタリン グを行った.その結果をFig. 16に示す.Fig. 12,Fig. 13 とFig. 16を比べると,Fig. 16はFig. 10,Fig. 11から示さ れる,Fig. 9の黄クラスタと黄緑クラスタの分割を捕ら えることが出来ていることが分かる.また,Fig. 16は キャンバの強さとそれに伴うCp分布の変化によって分 けられていることが分かる.よって,物理によるクラ スタとクラスタの意味という面で,PODのクラスタリ ングが既存の方法よりも優れていることが分かる. Fig. 9 佐々木らの観察によるクラスタリング結果 Fig. 10 黄クラスタの解のCp分布と形状 Fig. 14 形状のモード1の係数変化,文節,クラスタ リング(円の色はFig. 16に対応) Fig. 11 黄緑クラスタの解のCp分布と形状 Fig. 15 Cp分布のモード1の係数変化,文節,クラ スタリング(円の色はFig. 16に対応) ●クラスタ1 ●クラスタ2 ●クラスタ3 ●クラスタ4 ●クラスタ5 Fig. 12 形状データによるk-means法とSilhouette幅 によるクラスタリング Fig. 16 PODを用いたクラスタリング結果 6. クラスタリングを行った後のPOD分析結果 5章で行った,Fig. 16のPODによるクラスタリング結 果を下記に用いる.その中で,全非劣解データでは取 り出せなかった知見を取り出すことの出来た代表的な クラスタとして,クラスタ1とクラスタ2(Fig. 16に記載) を以下の分析で用いる. 1) クラスタ1 Fig. 13 Cp分布によるk-means法とSilhouette幅によ るクラスタリング クラスタ1に含まれる92個の形状データ,Cp分布デー タに対してPOD解析を行った.Clの小さい順に解を並 べ,抗力最小解をn = 1,揚力最大解をn = 92とし,基 準形状にはn=46の解を用いた.結果は以下のとおりで ある.Table 2はエネルギー比率の大きい順にモードを 並べたものである.Table 2より,形状変化については モード1,2で90%以上となり,Cp分布の変化について は,モード2までで90%を超える.そのため,形状,Cp 分布ともにモード2までを観察する. Fig. 18 medianの形状と各モードとmedianを合成し た形状(合成した形状の線の色は,Fig. 17の円の範囲 に対応) Table 2 クラスタ1にPODを行った場合の各モード のエネルギー比率 形状 Cp分布 Mode1 82.6% 80.5% Mode2 8.47% 12.7% Mode3 6.36% 4.35% Mode4 1.42% 1.60% n=35 Fig. 19 medianのCp分布と,モード1とmedianを合成 したCp分布 n=45 (a) 形状 n=29 n=45 (b) Cp分布 Fig. 17 クラスタ1に PODを行った場合の各モードの 係数 Fig. 17(a)の係数の変化に伴う形状の変化をFig. 18に 示す.Fig. 17 (a),Fig. 18より,一貫して後縁キャンバ が強くなることに加えて,n=35までは前縁半増大,上 面最大高さ増大,下面最大高さをとるx/cの位置の前方 への移動が起こり,n=45以降では上面最大高さの上昇 と下面最大高さの減少が見られる. Fig. 20 medianのCp分布と,モード2とmedianを合成 したCp分布 また,Fig. 17 (b)より,Cp分布についてn=28までモー ド1,2の係数が共に上昇し,その後n=45以降モード2 が減少する.またFig. 19より,モード1は増加によって, 上面全域の圧力降下とx/c=0.3より後方の圧力上昇にな り,Clの上昇に寄与している.Fig. 20より,モード2は 減少によって,上面x/c=0.1より後方の圧力降下と x/c=0.2より前方の圧力上昇により,Clの上昇に寄与し ている.よって,上面については,n=28付近までは, 前縁半径の増大とそれによる上面最大高さの増大が小 さい前縁先端の圧力上昇でx/c=0.2以降の圧力降下を もたらす.その後,前縁圧力上昇領域がx/c=0.1付近ま で広がり,大きな圧力上昇となる.下面については, n=28までは下面キャンバが強くなることと,下面最大 高さ位置が前方に移ることにより高圧領域を広く出来 るため,x/c=0.3より後方の圧力上昇によりClを増加さ れており,n=45以降では,下面最大高さが小さくなる ことで圧力降下を小さく出来るため,x/c=0.2付近の圧 力が上昇しClを増加させている.また,L/Dmaxの解が n=66であり,Cp分布のモード2が減少傾向にあることよ り,上面最大高さの上昇による上面前縁圧力上昇と上 面x/c≧0.2の圧力低下がL/Dのトレードオフに強く効い ていることが分かる. 2) クラスタ2 クラスタ2に含まれる32個の形状データ,Cp分布デー タに対してPOD解析を行った.Clの小さい順に解を並 べ,抗力最小解をn = 1,揚力最大解をn =32とし,基準 形状にはn=16の解を用いた.結果は以下のとおりであ る.Table 3はエネルギー比率の大きい順にモードを並 べたものである.Table 3より,形状変化についてはモ ード1,2で90%以上となり,Cp分布の変化については, モード1までで,90%を超える.そのため,形状はモー ド2 まで,Cp分布はモード1までを観察する. Table 3 クラスタ2にPODを行った場合の各モード のエネルギー比率 形状 Cp分布 Mode1 57.6% 92.9% Mode2 33.3% 3.38% Mode3 5.67% 1.84% Fig. 23 medianの形状と,モード2とmedianを合成し た形状 Mode4 1.86% 0.92% n=15 n=9 Fig. 24 medianのCp分布と,モード1とmedianを合成 したCp分布 n=16 (a) 形状 n=9 n=15 n=16 Fig. 22よりモード1の減少が前縁最大高さ付近の曲率を 大きくし,Fig. 23よりモード2の上昇が上面最大高さが 上昇している.またFig. 24より,上面x/c=0.2~0.7付近の 圧力の降下でClが上昇していることが分かる.よって, モード1またはモード2により,上面の流れが剥離する x/c=0.2付近の流れ方向角度が急になることによって, 剥離泡に沿う流れの曲率が増加し,上面の圧力降下に よりClが上昇したと考えられる.これは,Fig. 21におけ る,n=15と16の間のモード1の係数の急激な変化や, n=1~9,16~32における形状のモード2の係数とFig. 21の Cp分布のモード1の係数が共にnに対して比例的関係 であることより分かる. (b) Cp分布 3) まとめ Fig. 21 クラスタ2に PODを行った場合の各モードの 係数 以上のクラスタ1,2の議論より,Clの上昇に寄与する 形状変化について,全非劣解で行ったPOD分析の結果 に加えて以下のように変わることがわかる. クラスタ1 i. (n≦29) 前縁半径が大きくなる→先端以外の上面圧力の降下 下面最大高さのx/cが前方へ移動による広い下面キャ ンバ形成→下面に広い高圧領域を形成 ii. (45≦n) 下面最大高さの縮小→下面前方の圧力上昇 クラスタ2 剥離点付近の曲率を大きくする→剥離泡付近の流れ Fig. 22 medianの形状と,モード1とmedianを合成し の曲率増加による,上面中域の圧力の降下 た形状 さらに,上記よりクラスタ1,2についての非劣解面の 不連続が,揚力を上昇させるメカニズムの変化によっ て生じていることが分かる. 7. 結論 本研究では、PODによるクラスタリング方法が,ク ラスタリング個数やクラスタの意味といった点で,従 来のクラスタリング方法の問題点を改善することを示 した. また,クラスタリングを行った後に,PODを行うこ とで,全非劣解データに対してPODを行うだけでは分 からなかった形状、Cp分布の変化を捉えることが出来 ることを示した.これは,PODの分析対象とするデー タによって,引き出せる知見の階層が異なることを示 している. さらに,クラスタリングした後,PODを行うことに よって,火星飛行機翼型の場合,キャンバの変化に加 えて,クラスタによって揚力を得るメカニズムが異な ることが分かった. 一方,現在のPODによるクラスタリングは不連続や 傾向変化について、グラフの見た目によっており、ク ラスタ基準として十分とは言えない.今後は,不連続 や傾向変化について基準となる指標を導入し,クラス タリングを行う予定である. 参考文献 [1] [2] [3] [4] [5] [6] [7] [8] Jeong,S. Chiba, K. and Obayashi, S., ”Data Mining for Aerodynamic Design Space”, Journal of Aerospace Computing, Information, and Communication Vol. 2, No. 11, pp. 452-469, 2005. 立川 智章,大山 聖,藤井 孝藏「多目的空力最適化におけ るデータマイニング手法の研究」計算工学講演会論文集,Vol.13 佐々木ら,「遺伝的アルゴリズムによる低レイノルズ数高揚抗 比翼型の設計探査」,第56回宇宙科学技術連合講演会 飯田ら,「翼型形状のクラスタリングによる非劣解の分析方法 の提案」,進化計算シンポジウム2012 Akira Oyama, Paul C. Verburg, Taku Nonomura,Harry W. M. Hoeijmakers, and Kozo Fujii, ”FlowField Data Mining of Pareto-Optimal Airfoils Us-ing Proper Orthogonal Decomposition”, AIAA-2010-1140, 48th AIAA Aerospace Sciences Meet-ing, Orlando, Florida, January 4-7, 20, No. 10. A. Oyama, ”Conceputual Design of Mars Air-plane for MELOS”, 54th Space Science TechnologyConf., 3F01, 2010. Sirovich, L., ”Turbulence and Dynamics of Coherent Structures Part1: Coherent Structures,” Quarterly of Applied Mathematics, Vol. 45,No.3,pp.561-571, 1987. 平 邦彦 「固有直交分解による流体解析:1.基礎」ながれ 30,2011
© Copyright 2026 Paperzz