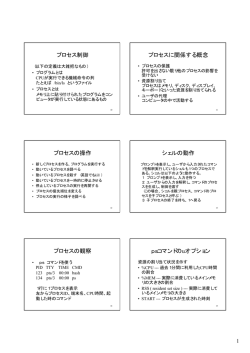
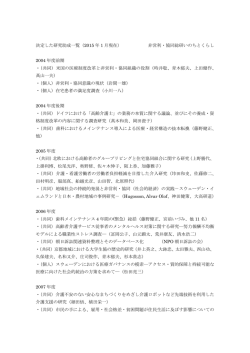
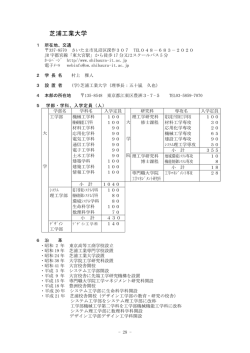
東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 車両型移動ロボットの誘導制御実験 –車間距離の PID フィードバック制御– 高機能機械制御研究室 野中謙一郎 2014 年 5 月 5 日 1 導入 高速道路などで車が連なって走行する車群では,先頭車両の小さな速度変化が後方の車ほど増幅されて,急加速や急減速 が生じることがあり,自然渋滞の一因になっている(図 1). 図1 車群安定性:先行車の速度が v から v に変化した場合.安定性が乏しいと,速度変化の大きさが後続車両に増幅して伝搬する. これは,前方の車との距離を一定に保とうとする運転者を含めたフィードバック制御系において,前の車との距離の変化 を観測してから後続車が遅れて速度を変化させる車群ダイナミックスが存在するためである.この車群ダイナミックスにお いて,前方車両の小さい速度変化が後方の車両になるほど増幅されるか否かを車群安定性と呼ぶ [1, 2]. 近年では ITS(Intelligent Transportation Systems: 高度道路交通システム) や ASV(Advanced Safety Vehicle: 先進安 全自動車) の技術が徐々に実用化されている [3].例えば,前方を撮影するカメラ画像で接近を検知したらブレーキをかけて 追突を防止する装置 [4] や,先行車との車間距離をレーザー距離計で計測して速度を自動的に制御する装置などが市販車に 実装されている.速度の自動制御時に安全で効率的な走行のために前述の車群安定性を保ち,変化を増幅させないためには, これらの制御装置の制御パラメータを適切に設定し,前方車へのフィードバック追従制御系を適切に設計する必要がある. 本実験では,車間距離制御を通じてフィードバック制御の基礎を学ぶ. 2 車両と車群モデル 車群制御は,車間距離が目標の値になり,速度の急な変化が生じないように制御することを目的とする.以下では,個々 の車両モデル,速度制御モデル,車群モデルおよびその安定性を説明する. 2.1 車両走行速度のダイナミックス v(t) は車の走行速度とする.運転者もしくは車間距離制御器が車速システムへの入力 vc (t) を指示すると,エンジンやブ レーキを含めた車速運動のダイナミックスにより,vc (t) に対して v(t) は遅れて変化する.そこで,車両速度モデルを次の 伝達関数表現 (1) で表すことにする. V (s) = GV (s)Vc (s) (1) ここで GV (s) は,入力 vc (t) から実際の走行速度 v(t) への速度変化のダイナミックスを表す伝達関数である.また V (s),Vc (s) はそれぞれ v(t),vc (t) をラプラス変換した変数である. V (s) = ∞ 0 v(t)e−st dt, Vc (s) = 1 ∞ 0 vc (t)e−st dt 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 本稿では,時間 t の関数を小文字で表し,ラプラス変換したラプラス演算子 s の関数は対応する大文字で表すことにする. 本実験で使用する車両の GV (s) は,K を定常ゲイン,ζ を減衰係数,ωn を自然角周波数とする次の 2 次遅れ系(標準形) の伝達関数で十分によく近似できる. GV (s) = s2 Kωn2 + 2ζωn s + ωn2 (2) 次の GV (s) に対する単位ステップ応答 (vc = 1.0 m/s) を図 2 に示す. GV (s) = s2 22.868 + 9.072s + 23.269 (3) [m/s] 1.2 1.0 0.8 0.6 0.4 0.2 0.0 0.0 0.5 1.0 1.5 2.0 2.5 t [sec] [s] 図2 vc (t) が単位ステップ入力の時の v(t) の応答のグラフ 【演習 2.1】 図 2 のシミュレーションを Simulink で行いなさい.また,(3) について,K, ζ, ωn を求めなさい. 2.2 車間距離と相対速度 d(t) を先行車との車間距離,先行車の速度を vF (t) とすると,vF (t) と自車の走行速度 v(t) との速度差 vF (t) − v(t) の積 分が車間距離 d(t) なので,次の関係を得る. d(t) = (vF (τ ) − v(τ )) dτ (4) これをラプラス変換すると,積分は 1/s に対応するので次式を得る. D(s) = 1 (VF (s) − V (s)) s (5) 2.3 車間距離制御器 dc (t) を目標車間距離とする.先行車との車間距離 d(t) との差 dc (t) − d(t) を用いたフィードバック制御器 GF B (s) を通 じて,車速システムへの入力 vc (t) を計算すると,次の関係を得る. Vc (s) = GF B (s) (Dc (s) − D(s)) (6) フィードバック制御器 GF B (s) には様々なものが考えられるが,最も基本的なものは以下の (1)P 制御,(2)PI 制御, (3)PID 制御である. 1. P 制御 (Proportional Control) GF B (s) = −KP (7) 2. PI 制御 (Proportional-Integral Control) KI s (8) KI − KD s s (9) GF B (s) = −KP − 3. PID 制御 (Proportional-Integral-Derivative Control) GF B (s) = −KP − 2 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 (6) に (7)(8)(9) を用いた vc (t) の計算式は下記のようになる. 1. P 制御 (Proportional Control) vc (t) = −KP (dc (t) − d(t)) (10) 2. PI 制御 (Proportional-Integral Control) vc (t) = −KP (dc (t) − d(t)) − KI (dc (τ ) − d(τ ))dτ 3. PID 制御 (Proportional-Integral-Derivative Control) d vc (t) = −KP (dc (t) − d(t)) − KI (dc (τ ) − d(τ ))dτ − KD (dc (t) − d(t)) dt (11) (12) 【問題 1】 P 制御,PI 制御,PID 制御の考え方を説明しなさい. 2.4 車間距離制御系 先行車と自車の車間距離フィードバック制御系 (1)(5)(6) のブロック線図を図 3 に示す. 図3 車間距離フィードバック制御系のブロック線図 Dc (s), VF (s) から D(s) への伝達関数を求めると,次のようになる.*1 1 1 − GF B (s)GV (s) s s D(s) = Dc (s) + VF (s) 1 1 1 − GF B (s)GV (s) 1 − GF B (s)GV (s) s s (13) また Dc (s), VF (s) から V (s) への伝達関数は次のようになる. 1 − GF B (s)GV (s) GF B (s)GV (s) s V (s) = Dc (s) + VF (s) 1 1 1 − GF B (s)GV (s) 1 − GF B (s)GV (s) s s (14) 【問題 2】 (13)(14) を導出しなさい. GV (s) を (2) の 2 次遅れ系として,GF B (s) に P 制御を用いた場合には (13)(14) は次のようになる. D(s) = V (s) = KP Kωn2 s2 + 2ζωn s + ωn2 Dc (s) + 3 VF (s) 2 2 2 + 2ζωn s + ωn s + KP Kωn s + 2ζωn s2 + ωn2 s + KP Kωn2 (15) −KP Kωn2 s KP Kωn2 D (s) + VF (s) c s3 + 2ζωn s2 + ωn2 s + Kp Kωn2 s3 + 2ζωn s2 + ωn2 s + KP Kωn2 (16) s3 【問題 3】 (15)(16) を導出しなさい. 【問題 4】 さらに,(13)(14) で PI 制御を用いた場合の式を導出しなさい. 【演習 2.2】 図 3 のブロック線図を Simulink を用いて作成しなさい.ここで GV (s) は (3) の 2 次遅れ系,GF B (s) は PID 制御とする.また先行車の速度は vF = 0.5 m/s,目標車間距離は dc = 1 m,車間距離の初期値は d(0) = 1 m とする.そし (図 4) て KP = 4.0, KI = KD = 0 として単位ステップ応答のシミュレーションをしなさい. *1 (13) における Dc (s) から D(s) への伝達関数と,(14) における VF (s) から V (s) への伝達関数が一致することに注意する. 3 2014 年度前期 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 0.5 4 1 Dc 1 s Integrator2 0 du/dt 0 Derivative 図4 VF KP VF,V 22.868 den(s) Gv KI 1 s Integrator D,Dc KD Simulink で作成した車間距離フィードバック制御系.速度差 vF − v の積分ブロックの初期値 (車間距離) を 1 にする. 2.5 車群モデル N 台の車群について,先頭から番号を i = 0, 1, · · · , N − 1 とし,i 番目の車の値を上付きの (i) で表す.i 番目の車の速度 は v (i) (t) とし,i(≥ 2) 番目の車について,i − 1 番目と i 番目の車の車間距離を d(i) (t) とする.車数が 3 台以上の車群で は,図 3 における自車の速度 v(t) が後続車から見た先行車の速度 vF (t) となり,それが直列に連結された系となる.すなわ (i) ち i = 1, · · · , N − 1 で vF (t) = v (i−1) (t) である.したがって,図 3 のブロック線図は,図 5 のブロック線図(N ≥ 3 の場 合)に拡張できる.前方車両の速度 v (i−1) (t) が後続車両の速度 v (i) (t) にフィードバックループを通じて伝搬している. 図5 車間距離フィードバック制御系のブロック線図 (N ≥ 3).D (i) (s) や V (i) (s) などの (s) は省略している. (i) (i) 【演習 2.3】 図 5 のブロック線図を Matlab で作成しなさい.ここで GV (s) は (3) の 2 次遅れ系,GF B (s) は PID 制御と する.さらに KP = 4.0, KD = KI = 0 として単位ステップ応答のシミュレーションをしなさい. 3 車群安定性 3.1 速度伝搬の伝達関数 (14) における vF (t) から v(t) への伝達関数を G(s) とおく.i 番目の車両における G(s) を G(i) (s) と表すと次式を得る. 1 (i) (i) − GF B (s)GV (s) s G (s) = 1 (i) (i) 1 − GF B (s)GV (s) s (i) (17) 特に (10) の P 制御を用いた場合には,G(i) (s) は次のようになる. G(i) (s) = (i) 2 (i) KP K (i) ωn (i) 2 (i) (i) (i) 2 s3 + 2ζ (i) ωn s2 + ωn s + KP K (i) ωn 4 (18) 2014 年度前期 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 3.2 車群安定性の条件 車群が安定であるとは,先頭車両の速度変化の振動が後続車両に伝搬する際に,振幅が増幅しないことである.式で表す と,車群の全ての車両の G(i) (s)(i = 1, 2, · · · , N − 1) について,任意の 角周波数 ω で (19) が成立することである [1]. (i) G (jω) ≤ 1 (∀ω ≥ 0) (19) これは G(i) (s) のボード線図のゲインが 0dB 以下であり,振動の振幅が増幅されないことを意味する. (2) の車両に対して,(7) の P 制御器 (KI = KD = 0) において,KP = 4.0 と KP = 0.5 の場合のボード線図*2 を図 6 に 示す.KP = 4.0 は (19) を満さないが,KP = 0.5 は満たしている. 20 0 -20 -40 -60 -80 -100 -120 -140 -160 0.01 1000 0 -20 -40 -60 -80 -100 -120 -140 -160 0.01 1000 0 -50 -100 -150 -200 -250 -300 0.01 0.1 0 -50 -100 -150 -200 -250 -300 0.01 1 10 w [rad/sec] 100 0.1 1 10 w [rad/sec] 0.1 1 10 w [rad/sec] 100 100 1000 phase phase [deg] phase phase [deg] 図6 gain gain [dB] gain [dB] gain 0.1 1 10 w [rad/sec] 100 1000 (3) の G(i) (s)(i = 1, 2, 3) に対して P 制御を用いた場合の伝達関数 G(s) のボード線図:左は KP = 4.0,右は KP = 0.5 【演習 3.1】 図 6 を Simlink で確認しなさい. (1) (2) (0) KP = 4.0, 0.5 で 3 台のシミュレーション結果を図 7 と図 8 に示す.dc (t) = dc (t) = 1.0 m,vc (t) = 0.5 m, d(0)(1) = d(0)(2) = 1.0 m としている.KP = 4.0 はオーバーシュートが増幅し,KP = 0.5 はオーバーシュートが生じてい ない.一方で,KP = 4.0 は収束は速いが,KP = 0.5 では収束までに長い時間がかかっている.また,KP = 0.5 では車間 (i) 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 vF v0 v1 v2 2 4 6 8 10 12 d0,d1,dc [m] vF,v0,v1,v2 [m/s] 距離 d(i) (t) は目標値 dc (t) = 1.0 m から大きな定常偏差を生じているが,KP = 4.0 では定常偏差が小さい. 14 2 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 d0 d1 dc 2 4 t [s] 図7 6 8 10 12 14 t [s] KP = 4.0(車群不安定):速度のグラフでオーバーシュートが後続車両ほど大きくなることを確認できる(左図). 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 vF v0 v1 v2 2 4 6 8 10 12 d0,d1,dc [m] vF,v0,v1,v2 [m/s] しかし車間距離のグラフでは,定常偏差は小さい(右図). 14 t [s] 図8 2 1.8 1.6 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 d0 d1 dc 2 4 6 8 10 12 14 t [s] KP = 0.5(車群安定):後続車は滑らかに先行車と同じ速度に収束することを確認できる(左図).しかし目標速 (i) 度への収束は遅く,車間距離 d(i) (t) は目標値 dc (t) = 1.0 m に対して大きな定常偏差を生じている(右図). *2 (i) Simulink でボード線図を描くには,vF = v (i−1) の信号線を右クリックして線形化のポイント/入力ポイントで入力に設定し,同様に v (i) を出 力に設定する.メニューのツール/制御設計/線形解析で右下のメニューからボード応答プロットを選択し,モデルの線形化をクリックする. 5 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 【演習 3.2】 (3) の G(i) (s)(i = 1, 2, 3) に対して,車間距離 dc を 2m に固定し,先頭車の目標速度 vF (t) を 0.4 m/s と 0.6 m/s の値を周期 40 s の矩形波で変化させた場合について,KP = 4.0 および KP = 0.5 とした P 制御の場合の応答をシ ミュレーションで求めよ.*3 【演習 3.3】 P 制御により速度がオーバーシュートせずになるべく速く追従し,かつ,車間距離追従誤差を小さくする KP をシミュレーションを通じて求めよ. 【演習 3.4】 PI 制御により速度がオーバーシュートせずになるべく速く追従し,かつ,車間距離追従誤差を漸近的に零にす る KP , KI (KD = 0) をシミュレーションを通じて求めよ.さらに,KD も含めた PID 制御による調整を試みよ. 【問題 5】 KP = 4.0, 0.5 に対する定常偏差を最終値定理で計算し,シミュレーション結果に一致することを確認しなさい. 【問題 6】 P 制御で,P ゲイン KP を大きくすると車間距離の定常偏差は小さくなる.このことを (15)(16) に最終値定理 を適用して証明しなさい. 【問題 7】 PI 制御では車間距離 d(t) の追従偏差 dc (t) − d(t) は零に収束する.このことを証明しなさい. 表1 制御方式 KP KI PID 制御のパラメータとシミュレーション結果 KD P 制御 4.00 0.00 0.00 P 制御 0.50 0.00 0.00 P 制御 0.00 0.00 P 制御 0.00 0.00 P 制御 0.00 0.00 PI 制御 0.00 PI 制御 0.00 PI 制御 0.00 結果 PID 制御 PID 制御 *3 0.4 と 0.6 で変化する矩形波を Simulink で作るには,Constant と Pulse generator のブロックを用いればよい. 6 2014 年度前期 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) LRF用反射板 LRF用反射板(裏) 図9 実験フィールド概観図 図 10 オーバルトラックコース 4 実験システム 4.1 実験コース 実験フィールドの概観図を図 9 に示す.実験フィールドは 7 m × 5 m の長方形で,滑らかなアクリル板が敷き詰められ, 反射板の板に囲まれている.床面の摩擦係数は約 0.3 である. 本実験では,フィールド上に定めた図 10 に示すオーバルトラックを実験車両が走行する.3 m ≤ x ≤ 4 m では y = 1 m と y = 4 m の直線を走行し,x ≤ 3 m と x ≥ 4 m ではこれらの直線に滑らかに接続された曲線上を走行する.曲線区間に おける基準点を O2 : (4.0, 2.5)[m] と O4 : (3.0, 2.5)[m] とする.また φk (k = 2, 4) を基準点 O2 , O4 からみた偏角とすると, φk は 0 ≤ φk ≤ π の値をとる.偏角 φk における基準点から曲線までの距離 rrk (φk )[m](k = 2, 4) は基準半径を R = 1.5 m とした次の式で表される. 1 1 1 rrk (φk ) = R 1 + φ2k − φ3k + 2 φ4k 2 π 2π (20) (0), rrk (π) を計算すると,(20) で表される曲線は y = 1 m と y = 4 m の直線に滑らかに接続することを確かめられる. rrk 2 本の直線区間の距離はそれぞれ 1 m,k = 2, 4 の曲線区間 (0 ≤ φk ≤ π) の経路上の距離はそれぞれ約 5.583 m である. 4.2 実験車両 実験車両に用いるロボットカー(図 11:ZMP 社製)は自動車の 1/10 スケールの小型車両である.内界センサとして,3 軸の加速度センサ,ジャイロセンサ,各車輪にロータリーエンコーダを備えている.外界センサとして,ステレオカメラや 測域センサ (Laser Range Finder: LRF) などを搭載し,さらに無線 LAN による車々間通信を用いた協調制御が可能であ る [13].ロボットカーのシステムブロック図を図 12 に示す.車両の位置は,実験車両に搭載した LRF で前方 ±120◦ の範 囲の反射板までの距離を計測し,得られた距離データから実験車両の x–y 座標と姿勢角 θ を計算している.そして車輪の ロータリーエンコーダから走行速度 v を計測する.さらに無線 LAN の UDP 通信による車車間通信で経路上の位置 sk を 後続車両に送信する. 経路座標 RoboCar(1台目) RoboCar(2台目) 距離データ 車載ステレオカメラ 測域センサ(LRF) CPUボード 赤外線測距センサ(8) 前輪(操舵輪) 図 11 ジャイロセンサ 3軸加速度センサ USB PCI CPUボード シリアル(RS232C) 距離データ 電圧 回転角度 ロータリーエンコーダ(5) (車輪回転角度,駆動モータ軸) 2相パルス 後輪(駆動輪) 無線LANモジュール USB ステレオ 左右画像 画像認識 モジュール CCDカメラ 測域センサ Laser Range Finder(LRF) WLAN(UDP) 経路座標 RoboCar(3台目) 無線LANアダプタ 回転角速度 電圧 加速度 電圧 ベースボード 駆動力 16bit PWM FET/H-Bridge 操舵 角度 PPM 操舵用 サーボモータ 実験車両:ZMP RoboCar-Z 図 12 7 実験車両のシステムブロック図 電流 駆動用 DCモータ 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 4.3 車間距離 実験車両は,図 10 のオーバルトラックの目標経路に追従するように操舵角を自動制御するが,様々な要因によって,目 標経路からの偏差を生じる.本実験の車間距離 d(i) は,図 13 に示す後輪間中心を目標経路上に射影した位置の経路差を目 標経路上の距離 d(i) = si−1 − si (i = 1, 2, · · ·) として定める.車体速度は後輪間中心の車体前方への移動速度とする. 曲線経路 直線経路 曲線経路 図 13 車間距離の定義 4.4 車両制御システム 実験車両の速度制御システムの構成を図 14 に示す.LRF 計測によって得た車両位置 (x, y) と姿勢角 θ をカルマンフィル タを用いてノイズを除去し,得られた x, y, θ の推定値から,図 13 の目標経路上の移動距離 sk (k = 1, 2, · · ·) を計算する. さらに前方者の sk−1 との車間距離 dk = sk−1 − sk と目標距離 dc との誤差に対する PID 制御器 GF B (s) によって車両の 指示速度 vc を算出する.同時に,目標経路に追従するための操舵角も時間軸状態制御系に基づく非線形制御則 [15] で算出 し,自律制御している. 先行車から 計測値 距離 方向 測域センサ 自己位置 カルマン 推定 フィルタ (LRF) 走行速度 ロータリー 計測値 エンコーダ 図 14 推定値 目標車間距離 目標経路 移動距離 操舵角 操舵角 制御器 後続車へ 制御システムのブロック図 5 実験 5.1 車両の車間距離制御システム 本実験では 3 台のロボットカーで車間距離制御する.TA の先輩の指示に従ってプログラムに制御パラメータを入力する. 目標車間距離 dc は 2.0 m の一定値とし,先頭車に対する目標速度 vF は 0.4 m/s と 0.6 m/s を 20 s 毎に切り替える. 5.2 実験課題 下記の P/PI 制御実験を行い,シミュレーション結果と比較しながら考察しなさい. (全員で 1 回) 1. P 制御 (1): KP = 4.0 と KP = 0.5 の場合について実験を行いなさい. そして,下記の P/PI 制御実験について,車群安定性を満たしながら可能な限り速く目標速度に収束する KP , KI (KD = 0) をボード線図とシミュレーションで確認しながら設計しなさい.さらに実験を行い,データからグラフを作成してシミュ レーションと比較しながら結果を考察しなさい. (各組で 1 回) 8 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 2. P 制御 (2): KP をチューニング (KI = KD = 0) オーバーシュートを抑制しつつ,速度をなるべく速く収束させるパラメータを求めよ 3. PI 制御 (1): 車間距離の制御性能を優先して KP , KI (KD = 0) をチューニング 車間距離をなるべく速く零に収束させるパラメータを求めよ.速度のオーバーシュートは可能な限り抑える. 4. PI 制御 (2): 速度の追従性能を優先して KP , KI (KD = 0) をチューニング オーバーシュートを抑制しつつ,速度をなるべく速く一定値に収束させるパラメータを求めよ.車間距離誤差も漸近 的に零にする. 5.3 実験データのダウンロード 実験データは実験終了後に次の URL からダウンロードできる.http://www.cl.mse.tcu.ac.jp/lab/exp-data/ 6 レポート 6.1 レポート課題 1,2 は全員必須,3 以降からは各自で 1 題以上を選択する. 1. 問題 1∼7 に解答しなさい. 2. 実験結果についてシミュレーション結果と比較しながら考察しなさい. 3. PID 制御による性能 (追従偏差とオーバーシュートの抑制) をシミュレーション上で試み,応答をさらに改善させな さい. 4. 4台以上の車群についてのシミュレーションを行い,車群安定性の指標 (19) について考察しなさい. 5. 車両位置や速度の計測誤差を考慮してシミュレーションしなさい.計測誤差については,実験で得られたデータをも とにして,ランダム信号を加えるなどする.さらにフィードバックゲインを調整して,応答の改善を試みなさい. 6. 実験フィールドの床面の摩擦係数は約 0.3 で圧雪路程度である.このことを考慮したシミュレーションを行い,実験 結果と比較しながら考察しなさい. 7. ロボットカー間の無線通信の時間遅れ(むだ時間)[17] を考慮したシミュレーションを行い,実験結果と比較しなが ら考察しなさい. 6.2 レポート提出 • 締切と提出場所 実験翌週の火曜日 10 時 45 分までに,10 号館 4 階の高機能機械制御研究室のポストに提出する. • 面接 レポート提出日の 13 時から 742 教室で全員に面接する. • 再提出の場合 面接で指摘された箇所を全て対応し,当日の 17 時までに 10 号館 4 階に提出する. 再々提出の場合のみ大学の電子メイル ([email protected]) で連絡するので,指示に従う. 9 東京都市大学 工学部 機械システム工学科 機械システム応用実験(高機能機械制御研究室) 2014 年度前期 参考文献 [1] 金井喜美雄,越智徳昌,川邊武俊:“ビークル制御 –航空機と自動車–”, 槇書店, (2004). [2] S. E. Shladover: ”Review of the State of Development of Advanced Vehicle Control Systems (AVCS)”, Vehicle Syhstem Dynamics, Vol. 24, pp.551-595, (1995). [3] 小野英一,川邊武俊:” 自動車は制御系で動く”, 計測と制御, Vol.42, No.4, (2003). [4] 柴田英司: “新開発ステレオカメラによる運転支援システム「EyeSight」の開発”, 自動車技術, Vol.63, No.2, pp.93-98, (2009). “隊列走行による交通流改善と走行抵抗・燃費低減効果” ,自動車技術,Vol.64,No.3, [5] 山崎穂高,岡本邦明,青木啓二: pp.61-66,(2010). [6] 山村吉典,瀬戸陽治:“車車間通信を利用した車群安定 ACC の研究”,日本機械学会 2005 年度年次大会講演論文集, No.05-1,pp.297-298,(2005). [7] 山村吉典,瀬戸陽治,永井正夫:“車車間通信を利用した車群安定 ACC の研究”,日本機械学会論文集,No06-7027, pp.379-384,(2007). [8] 山村吉典,瀬戸陽治,永井正夫:“車車間通信を利用した車群安定 ACC の研究 (第 2 報, モデル予測制御を用いた ACC 設計法)”,日本機械学会論文集,No06-7044,pp.1917-1922,(2007). [9] 大石真嗣:“スタビリティコントロールシステム”,自動車技術,Vol.63,No.12,pp.47-51,(2009). [10] 安達和孝,金井喜美雄,越知徳昌:“車間距離制御システムへの二自由度制御手法の応用”,計測と制御,44-7, pp.504-509,(2005). [11] 安達和孝:“車間距離制御システムの目標車間距離の考え方と実現方法”,日本機械学会第 15 回交通・物流部門大会講 演概要集,No06-52,pp.23-28,(2006). [12] 上村吉孝,中村誠秀,瀬戸陽治,井上拓哉,田志光,田村実:“ナビ協調アダプティブクルーズコントロールの開発”, 自動車技術,Vol.63,No.12,pp.52-55,(2009). [13] 谷口 恒,篠原 隆:“カーロボティクス研究用プラットフォーム ロボット・カー”,自動車技術,Vol. 64,No. 5,2010. [14] 中野,小森谷,米田,高橋,“高知能移動ロボティクス”, 講談社,2004. [15] 三平,伊東,“非線形制御論を用いた車両の経路追従制御と移動計画 –切り返しを用いた車庫入れ制御–”,システム制 御情報学会論文誌,Vol. 1,No. 6,1996. [16] 野中,中山,“車輪に横滑りを有する車両の厳密な線形化によるロバスト軌道追従制御”, 計測自動制御学会論文集, Vol. 42,No. 6,2006. [17] 門田,野中,“むだ時間を考慮した時間軸状態制御形による非ホロノミック車両の経路追従制御”, 計測自動制御学会 論文集,Vol. 48,No. 2,pp.2-10, 2012. 10
© Copyright 2026 Paperzz