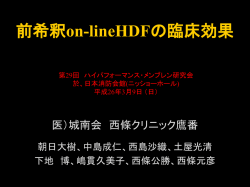
ウツボカズラの光合成の研究 清真学園高等学校 発表者:杉山 亮(2年) 担当:十文字秀行 1.目的 ウツボカズラの各部分の光合成で生じる酸素の量を調べ,それによって光合成の度合いを比 較する。今回は捕虫器と葉を用いたが,捕虫器の下部では光合成が活発であると仮定した。 2.方法 水 100gに炭酸水素ナトリウム1gを溶かし,穴あけパンチで作った葉片をシリンダーで内部 の空気を抜き,溶液に沈めた後,白熱電球の光(60W)を当て,葉片の浮かんでくる時間を計測 した。光合成で生じた酸素によって葉が浮くので,浮上までの時間で光合成の度合いを考える。 今回は光の熱による影響を防ぐために水の層を通して光を照射した。 3.結果 捕虫器の上部の葉片の浮かぶ時間が全体的 に下部のものより早かった。 (p 値<0.001) 4.考察 浮上までの時間が短いほど,光合成が盛んに 起きていると解釈できる。ウツボカズラの捕虫 器内では光合成は活発でないことがわかった。 5.結論 ウツボカズラの捕虫器での光合成は上部が下部より活発である。 6.キーワード ウツボカズラ 光合成 生物5-① ジグモの営巣条件 茨城県立日立第一高等学校 菊池 祐太(2年) 安齋 正人 【研究目的】 地面に穴を掘って巣を作るという習性を持つジグモ(Atypus karschi)が,巣を張るのに必要 な条件を調べ,そこからジグモの生息場所を特定する。 【実験方法】 土の粒の大きさ,湿り気,硬さを組み合わせて出来た8つの環境にそれぞれジグモを入れて巣 を作らせ,その巣の様子を観察する。また,この実験を繰り返し行う。土の粒の大きさは砕き, 湿り気は加える水の量で,硬さは押し固めることでそれぞれ調整した。 【結果】 柔らかい土 粒 粗い 硬い土 細かい 粗い 細かい 湿り気 湿潤 △ ○ △ △ 乾燥 × × × × ○→穴を掘り巣を作る △→穴は掘らず糸のみを張る ジグモ(♂) 巣(地上部) ×→穴を掘らず糸も張らない 巣(地中部) 【まとめ・今後の課題】 実験の結果から,ジグモは土が乾燥していると糸すら張らないが,土が湿っていると穴を掘ら ない場合でも糸は張ることが分かった。このことから,土が湿っていることが巣を作るために必 要な条件ではないかと予想できる。また,柔らかく細かい土が営巣に最も適することが分かった。 今後は,ジグモの住む土の科学的性質を調べるためpH等も条件に入れて実験をする。また, 異なった2つの環境を隣合わせに作り,ジグモがどちらに巣を作るかも実験する。その後,自然 下でジグモが多く生息する場所を調べ,そこの環境条件と,実験から得られたジグモの営巣に適 すると思われる環境条件を比較する。 生物5-② 久慈川下流域におけるサギ類の研究 茨城県立水戸第一高等学校 須山崇太郎(2年),國府田宏輔 1.はじめに 私は幼い頃から自然に触れるのが好きで,小学校低学年の時に野鳥に出会った。小学校 6 年時 に,縁があって茨城県環境アドバイザーの山口萬寿美先生からお誘いを受け,久慈川のサギ類の コロニーを訪れた際,その規模に大きな衝撃を受けた。関東最大級というサギ類のコロニーが地 元にあるということが感動であった。このコロニーにいるサギ類の生態調査を行うことで,自分 が幼い頃から大好きだった身近な自然環境の保全に役立てようと思い,それから 2014 年までの 5 年間観察を行ってきた。 2.観察場所と方法 久慈川の河口から 7km(茨城県常陸太田市堅磐町)の左岸のメダケの群生に,毎年 3 月~8 月に 6 種のサギ類のコロニーが形成される。観察は,2010 年~2014 にかけ,コロニーの対岸(那珂市本 米地区)の土手上から,双眼鏡やフィールドスコープ,カウンターを用いて以下のように行った。 ・観察時間は早朝,夕方のいずれかの時間帯に行う。 ・観察地点に着いたら,まずコロニー内にいるサギ類を種類別にカウントする。次に,コロニー に入った数と出た数を種類別にカウントし,10 分毎に記録していく。 3.観察結果 サギ類 入 2014年7月20日 個体数[羽] ゴイサギ出入り 2014年7月20日 ゴイサギ 入り ゴイサギ 出 ダイサギ チュウサギ コサギ アマサギ アオサギ ゴイサギ 200 200 日中活動するサギは早朝,日の 出に合わせて一斉にコロニーを出 ていった(Date not shown)。夕方 個体数[羽] 300 のサギ類の入りの数の変化は不規 100 則でなく,20~30 分の周期がある 100 という結果であった(Fig. 1)。た だし,サギの種類によって周期性 時間 時間 Fig. 2 Fig. 1 18:10~18:20 18:20~18:30 18:30~18:40 18:40~18:50 18:50~19:00 17:50~18:00 18:00~18:10 17:30~17:40 17:40~17:50 17:10~17:20 17:20~17:30 16:50~17:00 17:00~17:10 16:10~16:20 16:20~16:30 16:30~16:40 16:40~16:50 16:00~16:10 18:40~18:50 18:50~19:00 18:10~18:20 18:20~18:30 18:30~18:40 17:50~18:00 18:00~18:10 17:30~17:40 17:40~17:50 16:50~17:00 17:00~17:10 17:10~17:20 17:20~17:30 16:20~16:30 16:30~16:40 16:40~16:50 15:50~16:00 16:00~16:10 16:10~16:20 15:50~16:00 0 0 は異なっていた。また,ゴイサギ の出入りの数の変化は同期してい ることが分かった(Fig. 2)。 これらの結果は,2010 年~2014 年の調査のいずれでも同様の結果であった。 4.考察 Fig. 1 のように周期性が表れる理由について考察した。サギ類の移動速度を踏まえると,サギ 類は日中,種類ごとに集団を十数kmの間隔を開けて行動し,夕方,その間隔を保ったままコロ ニーに一斉に帰り始めることで,入ってくる数に 20~30 分の周期が表れるのだと考えた。サギ類 がコロニーからどのくらい離れた地域で活動し,帰って来るのかを調査するために今後はフィー ルド調査をする必要がある。Fig. 2 の結果より,ゴイサギは限られたコロニーのスペースを有効 に使うために,入れ替わるようにして出入りしていることが示唆される。 生物5-③ 変形菌の知性 ~変形菌はどのような培地でも最短距離を結ぶのか~ 水戸第二高等学校 溝口嘉菜(2),飛田彩香(2),星浩一 1.はじめに ≪変形菌とは≫ 変形菌とは、アメーボゾア門コノーサ綱変形菌亜綱に属する生物である。巨大なアメーバ状の 変形体を変身させてキノコのように胞子をつくる不思議な生き物である。別名を粘菌、ホコリカ ビともいう。変形体の色は私たちが用いている黄色のほかに、オレンジ、緑、ピンク等、多種類 存在する。主に朽木や土壌中に生息し、これらを腐らせる微生物を食べて生活している。 ≪動機≫ 先生から勧められ、変形菌の生態を調べていくうちに、変形菌の動きに興味を持ったから。ま た、その過程で生じた疑問を実験で明らかにしたいと思ったから。 2.目的 変形菌は、ある指定した地点を最短距離で結ぶように移動することが知られている。平面で動 きを観察した後、立体表面での変形菌の動きも合わせて観察し、検証したい。 3.飼育方法 個体は和名:モジホコリカビ(学名:Physarum polycephalum)を用いる。2%寒天培地を使 用し、オートミールを餌として与え、21℃で培養する。 4.実験方法 シャーレの中心に変形菌に覆われたオートミールを置き、その延長線上(中心から左右5㎝ほ どの位置)に餌となるオートミールを配置する。実験開始から4時間ごとに観察し、変形体の移 動の傾向を予測する。 5.結果と考察 変形菌が、シャーレの辺縁に沿って動いていた。これは、餌を探すために円形のシャーレ内い っぱいに広がったことで、シャーレの縁にぶつかり、辺縁に沿って動いたのだと考えられる。 6.今後の課題 実験結果より、私たちは「培地(容器)の形に、変形菌の移動方向が影響を受けているのでは ないか?」と考えた。そこで、今後は様々な形の容器を用い、実験を重ねていこうと思う。また、 実験を行うに当たって当初の目的である、立体表面での変形菌の動きを観察することと合わせて、 実験をすすめていきたい。 7.参考文献 中垣俊之(2010)『粘菌 国立科学博物館 その驚くべき知性』 株式会社 PHP 研究所 植物研究部 http://research.kahaku.go.jp/botany/henkeikin/3000.html 生物5-④ ダンゴムシの交替制転向反応 茨城県立緑岡高等学校 海野太一(2),川村きこ(2),松尾拓己(2),渡辺寛基(2) 1 塚野武史 はじめに 無脊椎動物に見られる行動の一つに交替性転向反応がある。事前の転向反応に対して逆方向に 転向する反応である。1950 年代からオカダンゴムシなどで広く研究されている。そして,オカダ ンゴムシの転向は BALM 説によるものと触角のあたる方向に由来するものとされる説があるが, この 2 つの条件が満たされた場合どちらが優先されるのか検証する。 2 実験方法 ① 両方の触角を同時に垂直に接触させる。 ② 1回の実験で繰り返し3回行う。 ③ 片方の触角を壁に接触させる。 ④ 1回の実験で右左3回ずつ行う。 3 実験結果 考察 ① 迷った確率は,73.3%,80.0%,53.0%であり,平均を求めると 68.8%であった。 →なぜ迷いが生じたのか不明なのでこれから調査してはっきりさせたい。 ② 右側 左へ進んだ確率は,66.7%,73.3%,80.0%であり,3回の実験の平均を求めると 73.3% であった。 左側 右へ進んだ確率は,93.3%,73.3%,80.0%であり,3回の実験の平均を求めると 82.2%であった。 →交替性転向反応は触覚のあたる方向に由来するという説は正しいといえる。 4 今後の課題 今回は,交替制転向反応が触角によって起こる説の検証しか行っていないが,今後は,BALM 説の検証をしていく予定である。また,触角に由来する説と BALM 説がともに正しいとすると, 矛盾が生じてしまうため,どちらが正しいのか検証する。 参考文献 ・オカダンゴムシの交替性転向反応はなぜ起こるのか? 林靖人(富山県立高岡高等学校) http:www.biol.tsukuba.ac.jp/tjb/Vol12No7/TJB201307YH.pdf(平成27年1月18日) ・日本の科学と技術 http://scienceandtechnology.jp/archives/3642(平成27年1月18日) ・オカダンゴムシの交替性転向の仕組みを探る 草野ゆうか,新妻裕翼(福島県立磐城高等学校) http://katosei.jsbba.or.jp/download_pdf.php?aid=336(平成27年1月25日) ※ 日付は最新確認日 生物5-⑤ アリの記憶能力と伝達能力に関する研究 清真学園高等学校 発表者:熱田 真須美(1年) 担当:十文字秀行 1.目的 クロヤマアリがエサを発見する行動や巣穴に戻る行動と,その後アリがエサに集まる様子を 観察し,アリの知られていない能力について調べる。 2.方法 ① 半径50cmの半円の用紙の中心をアリの巣穴出口前に一致させ設置する。その用紙は中 心から均等に8等分し,左から①~⑧のエリアを設定し,巣穴から50cm離れた④のエ リアと⑤のエリアの間にエサとしてあんこを設置する。 ② 最初にエサに到達したアリが巣穴に戻る様子を観察し,巣穴に戻った後エサを撤去し,そ の後巣穴から出てきたアリがどのように行動するかを10分間観察する。 ③ 実験が終わった後,実験中に実験の様子を撮影したビデオを見て,用紙とエサを設置した 後の用紙上を通るアリと,初めにエサに到達したアリが巣穴に戻った後巣穴から出てきた アリの数をエリアごとに数え,グラフを作成する。 3.結果 ・実験1 ・実験2 ※前・・・最初にアリが巣穴に戻る前 ・実験3 後・・・最初にアリが巣穴に戻った後10分間 4.考察 結果のグラフより,初めのアリが巣穴に戻った後に巣穴から出てきた多くのアリが,エサに 近い④と⑤のエリアを通った。よって,初めのアリによりエサに関する情報が巣の中にいるア リに伝えられた可能性があるといえる。そして,はじめのアリはエサに関する情報を記憶した という可能性があるということもいえる。 また,今回はアリの巣穴からエサへの道しるべとなるアリの足跡フェロモンを取らずに実験 を行ったが,巣穴から出てきたアリのうち,初めのアリが通り足跡フェロモンをつけたであろ う道を通ったアリの数より,ほぼ一直線にエサ付近へ向かったアリの数の方が明らかに多かっ た。このことより,やはりアリは足跡フェロモンだけを目印にエサへ向かうのではないといえ る。 生物5-⑥ 姿勢と集中力の相関に関する基礎的研究 文京学院大学女子高等学校 発表者:油谷 奈津実(2年),発表者:安藤 樹音(2年)担当教員名:大杉 美貴 「背景」 勉強をするときに姿勢を良くしなさいと言われることがある。そこで、姿勢と集中力には 関連性があるのか疑問に思い、研究テーマとした。 「目的」 以前の実験で、一般的に言われている、正しい姿勢をとることで、集中力が向上すること が分かった。しかし、少人数の被験者で行ったため、信憑性に欠けていた。そのため、今回 の実験では、被験者の人数を増やして、同様の実験を行う。 「方法」 被験者38名(右利き)に3種類の姿勢で百マス計算を1分30秒間解いてもらう。姿勢 は①正しい姿勢、②悪い姿勢(手で解答用紙をおさえない) 、③悪い姿勢(机に寝ながら解く) とした。被験者をAからCの3つのグループに分け、Aグループは①②③、Bグループは② ③①、Cグループは③①②の順で解いてもらう。 「結果」 平均正答数が最も高いのは、 『姿勢③』をとって解答したときだった。さらに、平均誤答数が最 も低いのは、 『姿勢③』をとって解答したときだった。したがって、正しい姿勢をとることで、百 桝計算を正しく解答する計算力が向上することが分かった。よって、正しい姿勢をとることで、 集中力が向上することが分かった。 「結論」 平均正答数が最も多いのは、 『姿勢③』をとって解答したときだった。したがって、正しい姿勢 をとることで、百桝計算を解く計算力が向上することが分かった。よって、正しい姿勢をとるこ とで、集中力が向上することが分かった。 「今後の展望」 *作業時の姿勢と集中力の関係について調べていきたい。 *食べ物と集中力の関係について調べていきたい。 生物5-⑦ アメリカザリガニの捕食・逃避の研究 開成高校 発表者:松本篤弥(高校 2 年) 担当教員:相原瑞樹 アメリカザリガニは成体の体長は 8cm - 12cm ほどで、基本的には湿地に穴を掘って生息し、 夜になると穴から出て餌を探す。ときに日中にも行動する。捕食対象としては小魚・小エビなど の泳ぐ動物や水草(以下、餌生物) 、捕食者としてはサギなどの鳥やフナなどの魚(以下、天敵) がいる。 本研究ではアメリカザリガニの捕食行動と逃避行動に着目した。 一般的に知られているアメリカザリガニの捕食方法は自身より小さな動く物体に対して鋏で掴 むというものである。逃避行動としては①自身より大きな物体を確認し接触すると後退する。ま たは②強い刺激があった場合尾を使って後退する。しかしこれらのこととともに、アメリカザリ ガニは物体の識別能力が低く、色彩感覚を持っていないということも知られている。そのため、 アメリカザリガニはあまり眼を利用せず捕食・逃避行動をとっていると考えられる。それがどの ようなものであるかを考え実験した。 初めにアメリカザリガニの異なる視覚情報によりどのような行動の違いがあるのかを調べた。 視覚情報のみでは威嚇又は無反応のどちらかの反応しか示さず、予想された逃避行動は発生しな かった。この実験において威嚇しなかった個体は成長途中のものであり、威嚇した個体は成体で あった。理由としては個体の成長による形態の変化により、威嚇の有無による生存確率に差が生 じた可能性が考えられる。次にアメリカザリガニがどのようにして餌生物と天敵を区別している のかを調べた。対象の縦の長さに関係なく、横の長さに依存して大きさを識別し行動していた。 このことは第二触角を用いて物体の大きさを識別し対象が捕食対象か天敵であるかを判断してい るために判断基準が横の長さに依存したと考えられる。次の実験では逃避行動に関係する異なる 部位への接触刺激に対してどのような違いがあるのかを調べた。結果から頭部の刺激に対して腹 部・尾部と比較してよく反応していた。理由として頭部には感覚器官が集中しているためと考え られる。また、1 日目と 2 日目のともに頭部・胸部の刺激に対する初期の反応は頻繁であり回数 を重ねるにつれて反応が鈍化した。1 日目において反応が鈍化しても 1 日たった 2 日目の初めに 鋭敏な反応が見られたために反応が鈍化した理由は一時的な慣れと考えられる。次にアメリカザ リガニの主要な感覚・運動器官がどのように捕食に関わっているのかを調べた。主要な感覚器官 が存在しなくても餌を捕食することができていた。予備実験においてアメリカザリガニは体部に 強い刺激があった時、刺激方向の物体に対して掴みかかり反撃したのちに逃避する場合があった。 この行動により主要な感覚器官が存在しない個体でも偶然捕食できたと考えられる。また、運動 器官の鋏が片方の場合捕食できなかった理由としては、片方の鋏のみでは動く対象をうまく掴む ことができなかったためと考えられる。最後に光強度の差により捕食方法に違いがあるのかどう かを調べた。平均すると暗幕下ではアメリカザリガニは照明下と比べ隠れ家に近い距離で捕食し ていた。アメリカザリガニが暗幕下で捕食する場合には刺激方向の物体に対して掴みかかり反撃 したのちに逃避する行動により偶然捕まえ、照明下では捕食対象を追いかけて捕食したためだと 考えられた。 生物5-⑧
© Copyright 2026 Paperzz