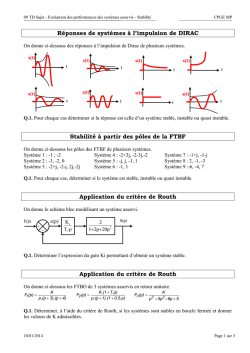
09 TD Corrigé - Evaluation des performances des systèmes asservis - Stabilité CPGE MP Réponses de systèmes à l’impulsion de DIRAC – Corrigé s(t) INSTABLE s(t) s(t) t s(t) STABLE STABLE t QUASI INSTABLE s(t) s(t) t s(t) INSTABLE STABLE INSTABLE s(t) s(t) t t INSTABLE s(t) t INSTABLE t t STABLE Stabilité à partir des pôles de la FTBF – Corrigé t t Un système asservi est stable si sa FTBF possède des pôles à partie réelle négative. Système 1 : -1 ; -2 → STABLE Système 2 : -3, -2, 0 → INSTABLE Système 3 : -2+j, -2-j, 2j,-2j → QUASI INSTABLE Système 4 : -2+3j, -2-3j,-2 → STABLE Système 5 : -j, j, -1, 1 → INSTABLE Système 6 : -1, 1 → INSTABLE Système 7 : -1+j, -1-j → STABLE Système 8 : 2, -1, -3 → INSTABLE Système 9 :-6, -4, 7 → INSTABLE Application du critère de Routh – Corrigé Q.1. Calcul de la FTBF : Ki 2 . 2.K i 2.K i Ti p 1 2p 20p 2 F ( p) 2 K 2 Ti p.(1 2p 20p ) 2.K i 2.K i Ti p 2.Ti p 2 20.Ti p3 1 i . Ti p 1 2p 20p 2 D( p) 2.Ki Ti p2.Ti p2 20.Ti p3 Critère de Routh Premier examen : il faut que Ki et Ti soient strictement positifs. Deuxième examen : Ti 2Ti 2K i 20T i donc Ti Ki 20 18/01/2014 Page 1 sur 4 09 TD Corrigé - Evaluation des performances des systèmes asservis - Stabilité CPGE MP Application du critère de Routh – Corrigé Q.1. Calcul de la FTBF : K K K p.(p 3).(p 4) F1 (p) 3 2 K p.(p 3).(p 4) K p 7.p 12p K 1 p.(p 3).(p 4) → D1 (p) p3 7.p2 12p K Critère de Routh Premier examen : il faut que K > 0. Deuxième examen : 7 12 1 K donc K 84 Ainsi : 0 K 84 Calcul de la FTBF : K.(1 T.p) K.(1 T.p) K.(1 T.p) p.(p 1).(1 0,5.p) F2 (p) 3 K.(1 T.p) p.(p 1).(1 0,5.p) K.(1 T.p) 0,5.p p 1,5.p 2 K.(1 T.p) 1 p.(p 1).(1 0,5.p) K.(1 T.p) → D2 (p) 0,5.p3 1,5.p2 (K.T 1).p K F2 (p) 3 2 0,5.p 1,5.p (K.T 1).p K Critère de Routh Premier examen : il faut que si K > 0et K.T + 1 > 0. 1 3 Deuxième examen : 1,5 (K T 1) 0,5 K donc K.T .K 1 Calcul de la FTBF : K 3 K p 5p 2 8p 5 → D3 (p) p3 5p2 8p 5 K F3 (p) 3 2 K p 5p 8p 5 K 1 3 p 5p 2 8p 5 Critère de Routh Premier examen : il faut que si 5+K > 0 Deuxième examen : 5 8 1 (5 K ) donc K 35 Ainsi : 5 K 35 18/01/2014 Page 2 sur 4 09 TD Corrigé - Evaluation des performances des systèmes asservis - Stabilité CPGE MP Application du critère du revers – Corrigé Q.1. et Q.2. ωco STABLE INSTABLE ωco KdB=-18dB 18 K=10 20 0,125 MG = +∞ Mφ ωco STABLE STABLE ωco MG MG Mφ Mφ ωco INSTABLE Mφ STABLE MG KdB=-22dB 22 K=10 20 0,079 18/01/2014 Page 3 sur 4 09 TD Corrigé - Evaluation des performances des systèmes asservis - Stabilité CPGE MP Réglage du facteur de résonance Q1. Q2. 13 Pour obtenir un facteur de résonance de 2,3dB, il faut déplacer la courbe de 13dB soit K 10 20 4,4 . 18/01/2014 Page 4 sur 4 9782100534197-Mosser-C04.qxd 14/12/09 7:58 Page 163 2. Les grandeurs ajoutées se nomment immédiatement : • position pour X ( p), obtenue par intégration de la vitesse V ( p), et image de cette position pour M X ( p) ; 6. Pour déterminer cette fonction de transfert, on se place dans le cas où X c ( p) = 0 • consigne pour X c ( p) , et image de la consigne pour U X ( p). 3. Le correcteur absorbe le gain du capteur et on obtient comme schéma-bloc soit sous forme canonique Z (p) ε(p) X c (p) + - ACK R + + p 1 R K2 + MR K2 R AC K + K 2 p + M Rp2 H Z ( p) = R AC K H Z ( p) = X (p) 1+ p K2 MR 2 p+ p AC K AC K 7. Étant donné que le gain statique de H Z ( p) est tie tend vers ACR K Z 0 suite à un échelon de perturbation d’amplitude Z 0 . Avec les valeurs numériques données, on obtient : 4. Fonction de transfert en boucle ouverte F( p) AC F( p) = K MR p 1+ 2 p K AN :F( p) = 20 p p 1+ 26.7 Les lieux de Bode présentent les particularités suivantes : • concernant le diagramme du gain – une cassure avec passage d’une pente de – 20 dB/décade à – 40 dB/décade pour la pulsation ω0 = 26,7 rd/s ; – un gain pour cette pulsation de – 5,5 dB. |F( jω0 )| = 0,53 – −90◦ pour ω0. R Z 0 = 9,4 mm AC K La performance souhaitée n’est pas atteinte, le système reste trop sensible aux perturbations. 4.11 1. On se place au niveau d’un point de fonctionnement, ce qui revient à poser θv (t) = 0. La lecture du schéma-bloc initial conduit à affirmer que dans ce cas : • l’angle θ1 (t) est posé nul également ; • les mesures m θv , et im θv (t) = 0 sont nulles en conséquence. • concernant le diagramme de phase la phase est comprise entre −90◦ et −180◦ avec le saut de Finalement, θ2 (t) = θ(t)et m d (t) = m θ2 (t) : le schéma bloc de la figure 4.39 se transforme bien en celui de la figure 4.40. 2. Le schéma bloc comporte un comparateur et six boîtes, ce qui induit sept équations à considérer. Parmi elles, l’équation du vérin devient Q( p) = Sp X ( p) et on obtient comme schéma-bloc G(dB ) 20 0 ∆ θc (p) ε (p) Uc (p) C + I (p) - Q(p) 1 Sp Ke 1 50 100 ϕ R AC K , la sor- 101 102 ω 103 M d (p) ∆ θ (p) X (p) Kc C 90 3. On transforme le schéma-bloc pour le rendre à retour unitaire 180 100 101 102 ω ∆ θc (p) 103 La phase est supérieure à −180◦ pour le point de gain en décibel nul et ne franchit pas le seuil critique de −180◦ lors des pulsations croissantes. Le critère du revers permet d’affirmer la stabilité du système en boucle fermée. + AC K AC K + K 2 p + M Rp2 soit sous forme canonique H B F ( p) = 1+ K2 MR 2 p+ p AC K AC K Cette fonction de transfert est de gain statique égal à l’unité, ce qui entraîne que la sortie rejoint l’entrée pour une entrée en échelon. 1 1+ S p C Ke Kc Cette fonction de transfert correspond à un système du 1er ordre de constante de temps τ= 1 H X ( p) = ∆ θ(p) La fonction de transfert en boucle fermée s’exprime sous forme canonique par 5. Pour déterminer la fonction de transfert en boucle fermée recherchée, on se place dans le cas où Z ( p) = 0 H X ( p) = CK e K c Sp - S C Ke Kc Le temps de réponse à 5 % d’un système du 1er ordre est T5 % ≈ 3τ. On en déduit la valeur du gain cherchée Ke = 3S T5 % C K c AN : K e = 6,4 10−5 m 3 s −1 A−1 163 9782100534197-Mosser-C04.qxd 14/12/09 7:58 Page 164 4. Par la transformée de Laplace, on obtient pour les deux équations V Q( p) = Sp X ( p) + p P( p) B M p2 X ( p) = S P( p) − F( p) et F(p) H F (p) ∆ θc (p) 1 (S P( p) − F( p)) M p2 On peut alors compléter le schéma-bloc proposé ∆θc(p) ε (p) Uc (p) C + I (p) Ke 1 - F (p) Q(p) P (p) B Vp + ∆ θ(p) X (p) + S - 1 - Mp2 Q(p) + + + S M p2 - X (p) S B 1 M p2 X ( p) = Q( p) − F( p) Vp S B S2 1+ 2 V Mp soit encore, après calcul 1 1 X ( p) = Q( p) VM 2 Sp 1+ p B S2 + + ∆ θ (p) X (p) Kc 1 . On en déduit a1 p 1 + a 2 p 2 C Ke Kc a1 p 1 + a 2 p 2 + C K e K c Le polynôme caractéristique D( p) de la fonction de transfert est alors 1 Sp 1 VM 2 1+ p B S2 V B S2 H F ( p) = VM 2 1+ p B S2 − Les résultats sont de la forme attendue avec comme coefficients a2 = VM B S2 a3 = − La construction du tableau de Routh n’est donc pas nécessaire. Néanmoins, si on amorce sa construction il vient : p 3 a1 a2 a1 0 p2 0 C Ke Kc 0 p1 − − p0 − Le zéro présent dans la première colonne permet de conclure à l’instabilité du système sans plus de calcul. phase [°] – 113 – 135 – 180 – 225 – 248 gain[dB] 9 14 18 14 9 On complète ensuite le diagramme de Black de la figure 4.65 G(dB ) H Q ( p) = Le coefficient en p2 est nul, donc la condition nécessaire de stabilité n’est pas satisfaite. Le système est instable en boucle fermée. 7. Sur le diagramme de la figure 4.45, on relève pour différentes pulsations les coordonnées (ϕ,G d B ) des points à tracer V − 2 BS F( p) + VM 2 1+ p 2 BS Apparaissent sous cette forme les fonctions de transfert H Q ( p) et H F ( p) 164 H Q (p) D( p) = C K e K c + a1 p + a1 a2 p3 On en déduit a1 = S avec H Q ( p) = H B F ( p) = BS V et e La fonction de transfert en boucle fermée est C K e K c H Q ( p) H B F ( p) = , 1 + C K e K c H Q ( p) C 1 S B Vp CK - Kc 5. On transforme localement le schéma-bloc précédent pour sortir l’arrivée de la perturbation de la boucle intérieure F (p) Q(p) + BS V M d (p) a2 = 1,736 10−8 s 2 a3 = −3,472 10−8 s 2 kg −1 BS B Q( p) − X ( p) pV V X ( p) = et a1 = 9,600 10−4 m 2 6. On souhaite appliquer le critère de Routh à la modélisation actuelle transformant la consigne θc ( p) en θ( p) On arrange ces équations pour écrire P( p) = Les applications numériques conduisent finalement à V B S2 30 25 20 15 10 5 0 5 10 15 20 25 30 35 40 45 50 270 240 210 180 ϕ ( o) 150 120 Figure 4.65 Diagramme de Black de la question 7. 90 9782100534197-Mosser-C04.qxd 14/12/09 7:58 Page 165 8. On utilise le théorème du revers : « Un système est stable en boucle fermée si, sur un diagramme de BLACK, on laisse le point critique sur la droite lorsque l’on parcourt le lieu de sa FTBO dans le sens des pulsations croissantes. » Pour cette FTBO, on laisse le point critique (– 180°, 0 dB) sur la gauche. Le système en boucle fermée est donc instable. La bande passante à 0 dB de la FTBO est obtenue par la relation On en déduit On a ici H B O ( p) = C K e K c H Q ( p) soit C Ke Kc H B O ( p) = 2ξ Q 1 a1 p 1 + p + 2 p2 ωQ ωQ On constate qu’il y a résonance compte tenu de la présence de √ 2 pôles complexes conjugués avec ξ Q < . 2 Pour un second ordre, le coefficient de surtension est 1 Q d B = 20 log 2 2ξ Q 1 − ξ Q Pour la valeur ξ Q = 0,0001, on obtient un coefficient de surtension Q d B = 74 dB. Pour revenir à la limite de la stabilité, il faut que le lieu de la FTBO passe sous le point critique. Il faut donc que le pic de la FTBO baisse au moins de 18 dB ce qui conduit à un coefficient de surtension maximal de 56 dB. On calcule alors comme condition sur le coefficient d’amortissement ξ Q > 0,0008 9. On considère la FTBO H B O 1 ( p) ω0d B = AN : ω0d B = 12 rad s−1 H B O 2 ( p) = C Ke Kc 2ξ Q 1 a1 p 2 1 + p + 2 p2 ωQ ωQ • pour ω tendant vers 0, la phase tend vers – 180° et le gain présente une pente de – 40 dB/décade ; • pour ω = 1 rad.s–1, l’asymptote du diagramme du gain passe C Ke Kc = 21,6 dB ; par le point de gain 20 log a1 • les diagrammes présentent une cassure pour ω Q : la phase diminue de 180° tandis que l’asymptote du gain passe à une pente de – 80 dB/décade. Le diagramme réel de phase venant approcher l’asymptote à – 180° par le dessous, le système est instable en boucle fermée. Sur le diagramme de Black de cette fonction, le critère du revers n’est pas respecté. Le calcul de la marge de phase conduit à une valeur proche de zéro mais par valeur négative. G(dB ) Cette fonction a un pôle nul et deux pôles complexes conjugués. Le pôle dominant est le pôle le plus proche de l’axe imaginaire, c’est-à-dire le pôle nul. Pour la suite, il convient de prendre C Ke Kc a1 p L’écart à la sortie du comparateur est caractérisé par ε( p) = C Ke Kc a1 10. On choisit de tracer sur la figure 4.66 les diagrammes de Bode asymptotiques de la fonction de transfert 20 0 C Ke Kc H B O 1 ( p) = 2ξ Q 1 a1 p 1 + p + 2 p2 ωQ ωQ H B O 2 ( p) = C Ke Kc =1 a1 ω0d B |H B O 2 ( jω0d B )| = 1 θc ( p) 1 + H B O 2 ( p) 50 100 150 ϕ 100 101 102 101 102 ω 103 104 105 103 104 105 180o 270o 360o 100 ω Figure 4.66 Diagrammes asymptotiques de la FTBO avec un intégrateur. On utilise le théorème de la valeur initiale et de la valeur fi1 nale, avec θc ( p) = 2 pour une entrée en rampe de pente p unitaire 11. Pour la pulsation ω = 12 rad.s−1 , le gain de la FTBO est égal à – 21 dB. Pour que cette pulsation soit la limite de la bande passante à 0 dB, il faut utiliser un gain de (K AV )d B = 21 dB soit 1 lim ε(t) = lim pε( p) = lim p 2 p→0 p→0 p (1 + H B O 2 ( p)) t→+∞ 12. Comme pour ω0 dB = 12 rad.s−1 la phase de la FTBO a comme valeur – 180°, le correcteur doit augmenter la phase de la FTBO de 50° pour cette pulsation. L’écart en poursuite vaut donc εP = a1 C Ke Kc AN : ε P = 0,0833 La rampe est de pente unitaire, donc le retard de la réponse en poursuite est de t = 0,0833s. K AV = 11,2 Le correcteur doit donc être tel que sin (50◦ ) = 1−a , ce qui 1+a conduit à a= 1 − sin (50◦ ) = 0,1325 1 + sin (50◦ ) 165 9782100534197-Mosser-C04.qxd 14/12/09 7:58 Page 166 Cet apport de phase doit se faire pour la pulsation ω0 dB = 12 rad.s−1 . Pour un tel correcteur, l’apport maximal de phase correspond 1 √ soit à la pulsation τ AV a τ AV = Échange des sommateurs pour résoudre les deux boucles imbriquées C op (p) G 1 (p) AN : τ AV = 0,229 s H v (p)( bv p + k v ) + C op (p) G 1 (p) + - Q v ( p) = G 1 ( p) Cop ( p) • L’asservissement de courant est équivalent à un asservissement de couple car, compte tenu des équations fournies figure 4.52, le couple moteur cm 1 (t) est directement proportionnel au courant i(t). En conséquence, contrôler le courant alimentant le moteur revient à contrôler le couple qu’il fournit. cc (t) • Le gain d’adaptation K a doit être tel que les rapports et i c (t) cm (t) soient égaux. Ainsi, les grandeurs comparées sont telles i(t) que l’écart est nul lorsque le couple de sortie cm (t) est égal au couple de consigne cc (t). On en déduit K a = K. 2. Il convient de vérifier si le cahier des charges est validé pour chacune des combinaisons possible. Dès qu’une combinaison ne satisfait pas à une des exigences, elle peut être éliminée. Les résultats sont synthétisés dans le tableau ci-dessous. Lorsque l’écart statique est nul, que la réponse est sans dépassement, que le courant aborbé par le moteur reste inférieur à 23 A, que la tension de sortie vs reste au dessous de 30 V, c’est le temps de réponse à 5 % qui est indiqué. Ce temps de réponse Tr est l’instant où le courant atteint 95 % de la valeur de consigne 14,3, soit 13,6 A. K c \Ti 0,001 s 0,003 s 0,005 s 1 Dépassement donc ne convient pas Dépassement donc ne convient pas Tr ≈ 0,009 S vs (0,002) > 30 V donc ne convient pas Dépassement donc ne convient pas Tr ≈ 0,006 S vs (0) > 30 V donc ne convient pas vs (0) > 30 V vs (0) > 30 V donc ne convient donc ne convient pas pas 3. L’expression de la fonction de transfert Hm ( p) peut être obtenue par transformations successives du schéma-bloc initial de la figure 4.54. Tout d’abord, on prend Cop ( p) comme entrée et Q v ( p) comme sortie C op (p) G 1 (p) + + + G 2 (p) - (bm p + k m ) Q v (p) ( bv p + k v ) H v (p) Q v (p) Hv ( p) (bv p + kv ) 1 + G 2 ( p) (bm p + km ) Hv ( p) (bv p + kv ) 1+ 1 + G 2 ( p) (bm p + km ) On en déduit finalement Hm ( p) = G 1 ( p)Hv ( p) (bv p + kv ) 1 + G 2 ( p) (bm p + km ) + Hv ( p) (bv p + kv ) 4. • Pour être en régime permanent et déterminer une relation entre le couple opérateur et la position articulaire virtuelle, il suffit de déterminer la limite Q v de qv (t) quand le temps t tend vers l’infini pour l’entrée en échelon unitaire cop (t). Le théorème de la valeur initiale et de la valeur finale conduit à : lim qv (t) = lim p.Q v ( p) p→0 t→+∞ Sachant que Q v ( p) = Hm ( p)Cop ( p) et Cop ( p) = 1p , on en déduit l’expression Q v = lim Hm ( p) p→0 En tenant compte du résultat de la question précédente, il vient Q v = lim p→0 La solution présentant le meilleur temps de réponse tout en respectant les autres critères est K c = 1,4 et Ti = 0,005 s. H v (p)( bv p + k v ) 1 + G 2 (p)( bm p + k m ) Réduction de la deuxième boucle 1. 166 + Réduction de la boucle interne 4.12 2 Q v (p) - G 2 (p)( bm p + k m ) 1 √ ω0dB a Remarque : Pour être sûr que la pulsation de coupure à 0 dB soit ω0 dB = 12 rad.s−1 , il faut corriger le gain K AV . En effet, le gain de la FTBO est légèrement modifié par le correcteur. Il est augmenté de 10 log a1 au voisinage de la pulsation de coupure choisie. 1,4 + G 1 ( p)Hv ( p) (bv p + kv ) 1 + G 2 ( p) (bm p + km ) + Hv ( p) (bv p + kv ) Compte tenu des éléments fournis, on obtient finalement Qv = 4 kv km Comme le couple appliqué est unitaire, on a 1 = R Q v d’où R= km 4 kv • Le critère de raideur demandé (figure 4.55) impose R > 2 Nm/rad. En conséquence, kv et km doivent satisfaire la relation : km > 80 kv 5. • En observant les diagrammes de Bode de Hm ( p), on constate que la première asymptote du diagramme de gain est horizontale et que le déphasage est nul. La fonction Hm ( p) est donc de classe zéro. Pour les grandes pulsations, le déphasage tend vers – 270°, la pente du diagramme de gain est de – 60 dB/décade. Le degré du dénominateur est donc égal au degré
© Copyright 2026 Paperzz